小衛星集群系統任務規劃與控制方法*
2022-09-09 01:50:18左小玉陳天冀
航天控制 2022年4期
白 雪 左小玉 陳天冀 徐 明
1. 北京航空航天大學 宇航學院, 北京 100191 2. 北京航空航天大學 未來空天技術學院/高等理工學院, 北京 100191
0 引言
近年來,現代小衛星優勢在國內外空間探測任務中體現的越來越明顯。小衛星具有成本低、研制開發周期短、應用前沿技術、可靠性高的特點,成千上萬的小衛星可構成集群,通過群體行為共同實現空間任務[1-3]。
自然界中常見的群體行為通過具有自主行為能力的個體相互配合,共同合作完成任務,呈現集體自組織性和有序協同性[4]。對于復雜的空天任務,傳統的航天器星座、編隊等空間構型已無法滿足對于自主任務、分布協同和系統進化的需求,因此利用飛行器的集群行為,借助集群感知、智能決策、協同控制等技術,代替大衛星進行空間任務,極大地擴展了衛星的探測區間或偵察范圍,使小衛星集群協同任務模式發揮更大效能。針對目標檢測任務,小衛星集群可以實現多點分時的多重覆蓋。小衛星集群采用分布式軌道轉移控制,任務群族相鄰小衛星直接通信,可以減少信息量,降低計算機和通信的要求,易于實現[5-7]。不同于傳統編隊飛行具有繞飛中心且關注成員個體的位形分布,大量小衛星組成的集群系統不再具有成員間明顯的隸屬關系,關注整體分布,傳統主從式航天器控制方法已不再適用[8],需要對空間集群整體任務規劃模式與智能協同控制進行研究。
目前已有多個國家的相關機構開展了航天器集群的研究工作。美國國家航空航天局(NASA)提出一種探測小行星帶的衛星集群系統(ANTS),利用1000顆小衛星組成的星群,完成小行星帶探測,其中群衛星系統被劃分為不同等級,搭載不同載荷,利用群智能技術實現信息交互[9]。美國國防先進研究計劃局(DARPA)提出一種將航天器以組為任務基本單位,利用無線通信技術,代替單個大型航天器進行空間任務的方案(F6系統)。該方案以信息交互為紐帶,靈活處理星間信息,實現傳統單一衛星上各子系統的相應功能,并驗證了衛星集群相比單個大衛星具有更廣泛的適應能力且大大降低成本[10]。英國格拉斯哥大學提出一種利用航天器集群組成“天基鏡群”的方案,主要依靠安裝在集群表面的鏡面將太陽光反射到小行星表面,從而使小天體受熱產生推力改變軌道。結合全球定位系統和星載自主導航系統,此方案還可以精確確定小行星變軌時間[11]。
可以想像,未來外太空任務將以運行在近地軌道上的巨量小衛星星群形式進行空間任務規劃與探測,由此帶來的應用效益遠大于若干顆大衛星帶來的影響。因此本論文關注小衛星大規模星群,對空間集群任務規劃模式進行研究,引入集群智能協同與規劃,實現智能指揮與訓練決策,進行系統整體自主協同控制,為我國未來開展小衛星大規模集群設計與任務規劃提供必要的理論基礎和技術支撐。
1 小衛星集群任務規劃模式與流程
小衛星集群任務規劃通過從底向上、總分總的系統,發揮分布式特點,實現對空間目標的特定任務。本文將小衛星集群系統分為作為空中軌道基地的“空間基地”和其上所攜帶的大規模小衛星星群兩部分。其中,“空間基地”部署在近地軌道上,具備較強的變軌能力,為小衛星星群提供支援與承載、燃料補給、資源保障等功能,并進行環境感知和態勢評估等職責;小衛星構成任務星星群小組,小組內包含多顆任務星與一顆指揮星,由“空間基地”在目標附近指定位置釋放,具體執行任務指令,一次任務可根據需求和任務評估釋放多個星群小組。星群可以依托“空間基地”根據不同需求,進行任務構型的快速解算與相應種類有效載荷的高效裝配,從而進行協同自組織管理運行,實現單一航天器無法完成的復雜任務。執行任務指令期間,“空間基地”通過對空間環境的感知,利用智能指揮與決策,執行自主任務規劃的運行機制,明確任務星星群任務模式與規模,并根據任務評估結果進行多輪次任務部署。
本文中小衛星集群能夠實現的任務模式包括:目標探測、動能攔截和空間非合作目標交會。1)目標探測:任務星裝載紅外探測系統和可見光視頻裝置等,當目標航天器到達任務范圍時,任務星開啟星上探測設備,從多個角度方位獲取目標相對位置、姿態、工作狀態等信息;2)動能攔截:以任務星自身作為整體直接碰撞目標,打擊效果顯著,通常情況下,目標難以在短時間內采取有效的對抗或防范措施,并且動能攔截方式部署靈活,魯棒性高,生存能力強,技術相對簡單;3)非合作目標交會:通過任務星靠近目標之后利用自身攜帶的仿生吸附裝置與非合作目標進行交會對接,實現在軌衛星故障修復等功能。無論何種任務模式或場景,都需要航天器集群內部分工協作,實現探測,識別,追蹤,導航等功能,對集群衛星間通信、信息交互和自主決策能力都提出了較高要求。
空間小衛星集群流程中任務模式采用并行策略,即由任務需求自主決策確定星群任務模式和星群規模,可采取單一模式,亦可采取多種模式按時間先后或同時完成指定任務。
2 集群系統智能指揮與決策
2.1 基于多Agent系統的集群智能指揮與決策
小衛星集群智能指揮與決策主要基于多個Agent系統,從底向上實現Agent間的協同和相互操作,包括協調知識、目標、意圖和規劃等智能行為[12]。利用多個Agent間的通信構建一個垂Agent體系統,不僅能夠克服單個Agent的局限性,而且交互通信可以確保所有Agent獲得關鍵信息,彼此相互依存和相互組織的關系能使該系統靈活地求解復雜問題。
基于多Agent系統的小衛星集群智能指揮與決策總體框架,分為兩層結構:上層為決策層,位于“空間基地”,主要功能為環境感知和態勢評估,并根據結果進行星群動態協同任務規劃,選擇任務模式和集群規模。下層為執行層,由多個小衛星個體組成星群小組,主要負責解算執行任務時的小組構型和軌道轉移策略,并保持個體之間的信息交互。
集群系統智能指揮與決策主要是根據態勢評估函數、目標屬性、目標和“空間基地”的狀態、上一輪任務效果進行星群動態協同任務規劃,確定新一輪任務指令,包括是否進行下一星群小組的釋放、星群小組任務模式和規模。下達任務執行指令后,地面站獲取到目標星的狀態和類型并傳送給“空間基地”,“空間基地”需要根據總體任務需求、目標星的類型(遙感、通信、攔截等)、自身狀態、目標狀態進行決策,確定每個星群小組任務模式與每組衛星數量。當前一組結束任務后,根據指揮星傳遞回來的任務評估結果,確定下一星群小組的模式與數量。重復以上過程直至完成總體任務要求。流程圖如圖1所示。
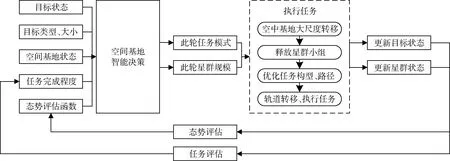
圖1 小衛星集群指揮與決策流程圖
不同的目標類型決定了任務模式的先后順序。而且不同的任務模式,后期姿態調整與任務評估也不盡相同。表1給出不同目標對任務規劃的不同標準及需求。此外,目標星的大小也將影響集群任務規劃中星群小組的規模。

表1 不同目標的標準及需求
2.2 環境感知和態勢評估方法
態勢評估主要是基于航天器感知的目標、集群和環境信息,評估當前集群所處態勢優劣并預測相應的態勢發展。這是集群決策系統的核心,對星群小組內單個衛星的配置、規模、類型分配及性能發揮有重要影響。態勢評估本質是建立從感知航天器態勢信息(包括目標狀態、類型、大小,集群狀態,“空間基地”狀態等)到態勢值的復雜映射關系。可以將態勢評估函數分為角度優勢函數、速度優勢函數、軌道高度優勢函數、距離優勢函數以及效能優勢函數,之后根據集群系統性能確定的固有判斷條件,以具體數值的方式給出態勢評估確定結果[13-14]。
基本的態勢評估函數包括:
1)角度優勢函數
對于目標探測任務模式,設計角度優勢函數κA為:
(1)
其中任務星相對于目標的方位角為φr,星群個體搭載的雷達最大搜索方位角為φR,激光探測最大擺角為φM,不可逃逸圓錐角為φK。對于動能攔截和目標交會模式,無需考慮角度優勢函數,默認κA=1。
2)速度優勢函數
對于動能攔截模式,相對速度差越大,效果越好,設計速度優勢函數κV為:
(2)
其中Vrm為動能攔截最佳速度,Vr為任務星和目標衛星速度差。
對于目標探測和交會,相對速度差接近于0,任務效果最好,設計速度優勢函數為:
(3)
3)軌道高度優勢函數
由于星群小組中的指揮星負責感知局部態勢,并進行決策指揮,因此其相對于目標衛星的軌道高度將決定星群小組任務的優勢程度。設計高度優勢函數κH為:
(4)
其中hrm為任務最佳軌道高度,hr為指揮星的運行高度。
4)距離優勢函數
對于目標探測,設計距離優勢函數κD為:
(5)
其中任務星相對于目標的距離為dr,星群個體搭載的雷達最大搜索距離為dR,所攜帶激光測距儀的最大識別距離為dM,激光最小不可逃逸距離為dKmin,最大不可逃逸距離為dKmax。
對于動能攔截和目標交會模式,設drm為任務最佳距離,設計距離優勢函數κD為:
(6)
5)效能優勢函數
集群的效能函數由衛星及星上載荷的性能決定,不需進行估計與優化,κE表示效能優勢函數。當星群小組滿足任務條件時,κE=1,否則為0。
6)整體態勢評估函數
整體態勢評估函數為均衡不同優勢函數κA,κV,κH,κD,κE之間的量級和取值范圍的不同,使各個態勢值均保持在合理的有限范圍,避免態勢值差異過大而影響整體評估效果,采用帶權重的Sigmoid函數描述。將κA,κV,κH,κD,κE作為Sigmoid函數的自變量輸入,可得到參數可調的整體態勢評估函數T:
(7)
其中,ωk,βk,k=1, 2, 3, 4, 5為優化權重參數。
3 集群系統構型優化與軌道轉移
集群系統任務星星群小組執行任務時,需要進行構型優化和相應的軌道轉移與重構。轉移過程中,“空間基地”進行大尺度轉移迅速接近目標,之后星群小組中指揮星通過脈沖轉移軌道,任務星則通過連續有限推力變軌實現任務構型建立。連續有限推力轉移基于相對運動模型實現,其目標構型通過優化算法得到,轉移路徑及轉移過程中加速度的設置通過一種基于Jordan分解的連續推力控制重構策略計算得到。
3.1 集群系統分布式轉移策略
集群任務中,每個任務星之間姿態、位置、速度等信息與集群中相鄰成員進行交互,采用分布式控制方法,不需要獲取全部集群成員的信息,減少信息量的同時降低了單顆星上計算機的要求。
獲得任務模式和星群規模后,“空間基地”通過改變軌道面以及Lambert轉移來縮短“空間基地”與目標星的距離。在確定任務星與“空間基地”的軌道要素后,先在兩軌道面交點上用一次脈沖改變軌道平面,對于本身已經共面或者兩軌道面相差較小的情況可以跳過這部分。修改完軌道面后,通過Lambert轉移縮短“空間基地”與目標星的距離,其中Lambert轉移的時間以及圈數通過優化算法得到,在優化中時間約束在適當范圍內,以所需總速度改變量為優化目標。當目標星進入“空間基地”任務執行范圍內后,“空間基地”進行減速,既避免與目標星距離過近,也減少了指揮星與目標星的速度差。圖2給出集群“空間基地”轉移部分流程圖。

圖2 集群“空間基地”轉移部分流程圖
集群中單個衛星近距離軌道轉移采用相對軌道坐標系,以星群群組中的指揮星為中心,實現任務星星群由“空間基地”向目標星的接近。建立由指揮星與N個任務星組成的第j輪星群小組相對運動關系:
(8)


(9)

(10)

3.2 集群任務構型優化
當“空間基地”完成減速后,開始進行集群星群小組構型優化與分布式控制。任務星個數以及任務模式由頂層決策得到。執行任務的構型通過代理模型進行優化[16-17]。圖3為所示的集群構型優化與分布式控制流程圖。
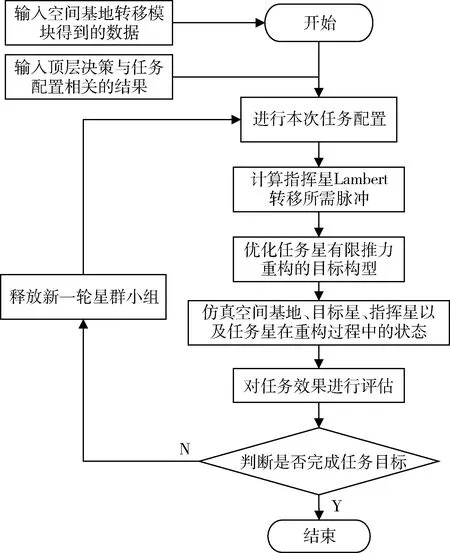
圖3 集群構型優化與分布式控制流程圖
對于目標探測、動能攔截和空間非合作目標交會這3種不同的任務模式,在任務構型的優化中,分別設置了不同的目標函數以及約束條件。
(1)目標探測
在任務構型的優化中,約束條件為任務星與目標星的距離能夠處于星上設備所及的探測范圍內。優化目標考慮3個因素:1)整個重構過程所消耗的推進劑總量最小;2)指向性問題。對于星上設備指向或者激光照射位置有明確要求的目標,安排盡量多的任務星滿足這一要求;對于沒有要求的衛星,盡量使得任務星在空間上分布較為均勻,盡量從多個方向探測目標;3)由于目標探測需要持續觀測,希望在執行任務期間,任務星相對于目標星的角速度盡量較小。
(2)動能攔截
在任務構型的優化中,約束條件為執行時刻任務星能夠與目標星發生碰撞,即任務星在任務期間的位置應當都在目標星的體積內。優化目標考慮2個因素:1)碰撞時相對速度盡量較大,才能保證撞擊的效果;2)對于不同的任務星,其與目標星碰撞的角度與位置盡量存在一定差異,從而能夠將效果最大化。
(3)非合作目標交會
約束條件設置為執行時刻任務星與目標星的相對距離和速度在一定范圍內,對于目標交會而言,這里的執行時刻并非直接交會的時刻,而是任務星開始近距離逼近目標的時刻。優化目標考慮2個因素:1)與目標探測相同,希望所消耗的推進劑盡量較少;2)從實現交會的角度考慮,需要使得在執行時刻,目標星與任務星的相對速度盡量較小,從而避免在交會對接中發生碰撞,影響任務效果。
4 集群系統協同控制
在復雜空間環境中,眾多集群個體協同配合執行任務,進行有效的協同制導或跟瞄控制,可提高目標探測的準確性和任務效能。
4.1 集群系統協同末制導
空間集群任務中,集群航天器始終運行在軌道空間,與目標之間相對運動狀態變化很快,要求其具備高精度制導和控制能力。而集群系統內多個個體對目標進行不同位置、不同角度的觀測,需要任務星在時間上具有統一性。因此,在任務執行過程中,采用基于線性二次型調節器(LQR)的控制器,使集群個體執行任務時能夠最小化與目標航天器的誤差,實現高精度的集群協同末制導。
4.2 集群系統姿態協同控制
目標探測與空間交會具有較高的姿態機動和指向控制精度要求。在軌道轉移后,每組任務星圍繞在目標星周圍,調整姿態以進行末制導。以目標探測為例,期望衛星能調整姿態對準目標星,即本體軸在任務星與目標星的連線上。軌道轉移過程中的姿態根據所需推力方向進行調整。經過一定時間的姿態穩定,最終各個衛星的姿態都達到期望值,繼而執行任務指令。
5 仿真實例
小衛星集群系統針對單個目標進行空間集群任務規劃,“空間基地”初始軌道要素為:軌道半長軸as=7178137m,偏心率es=0,軌道傾角is=30°,升交點赤經Ωs=30°,近地點幅角ωs=0°,緯度幅角Ms=0°。目標初始軌道要素為:軌道半長軸at=7178137m,偏心率et=0,軌道傾角it=35°,升交點赤經Ωt=35°,近地點幅角ωt=0°,緯度幅角Mt=10°。集群任務配置為:集群最大任務輪次為6次,單次最大衛星數20個。目標整星重量1000kg,種類為遙感衛星。
采用本文的方法完成空間環境感知和態勢評估,并進行集群任務規劃、軌道轉移與構型優化,最終實現分布式控制。圖4給出“空間基地”與目標星相對軌道(轉移段)。此次任務共進行4輪星群釋放,每一輪智能決策與指揮結果分別為目標探測(9顆任務星)、目標探測(10顆任務星)、目標交會(10顆任務星)、目標交會(10顆任務星)。任務規劃過程中的相對軌道如圖5~8所示。
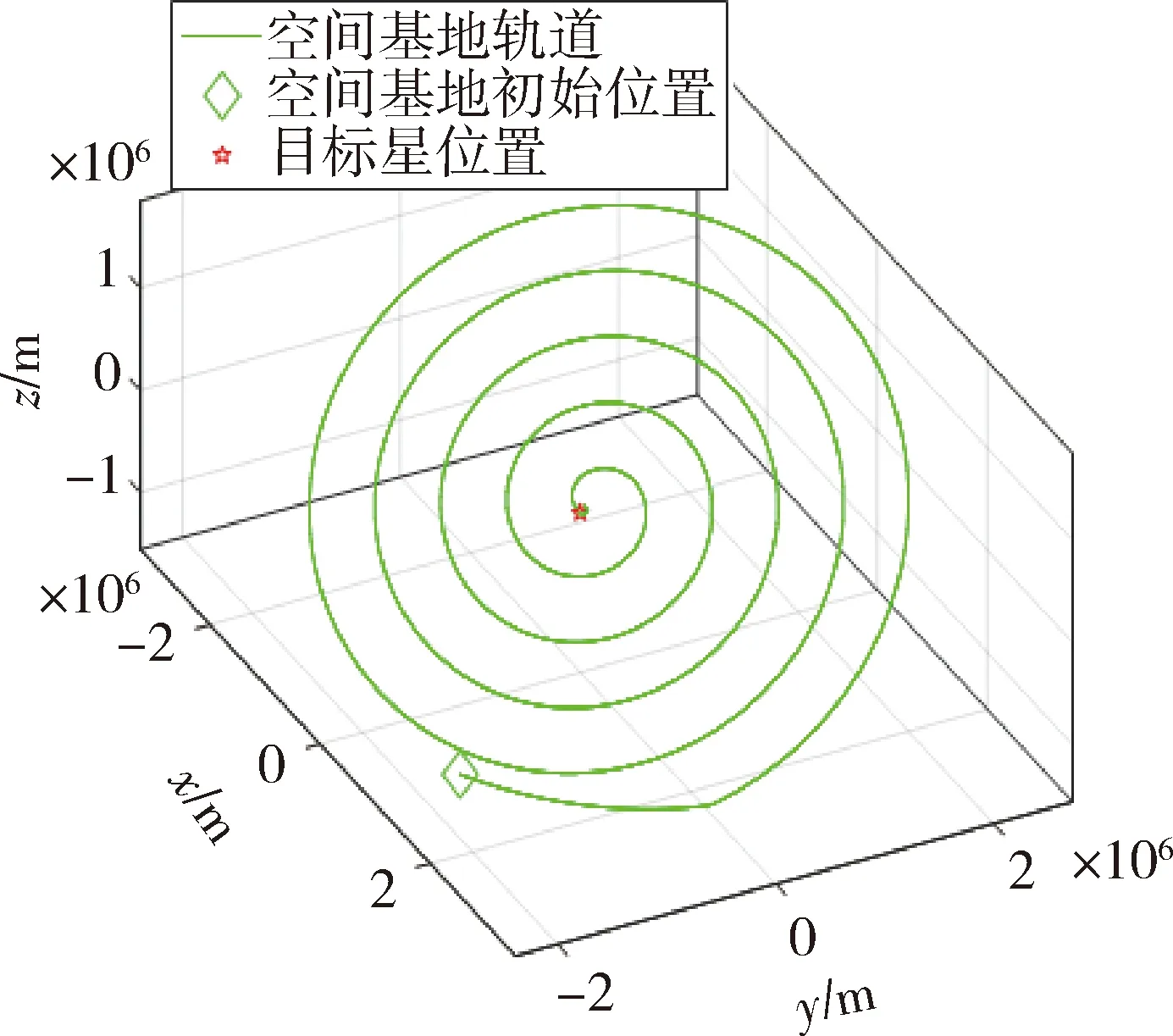
圖4 “空間基地”與目標星相對軌道(轉移段)
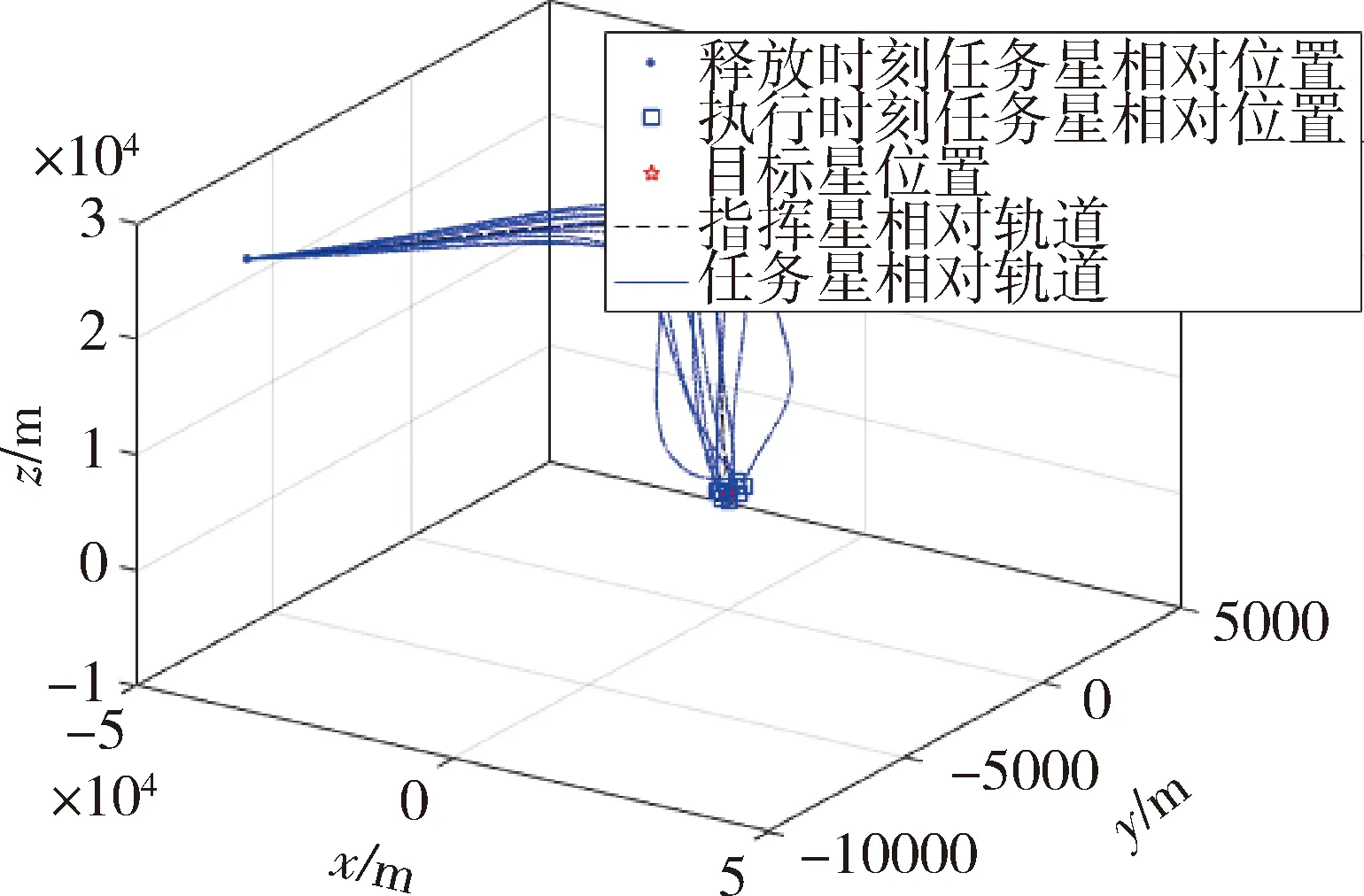
圖5 第1次任務軌道(目標探測)
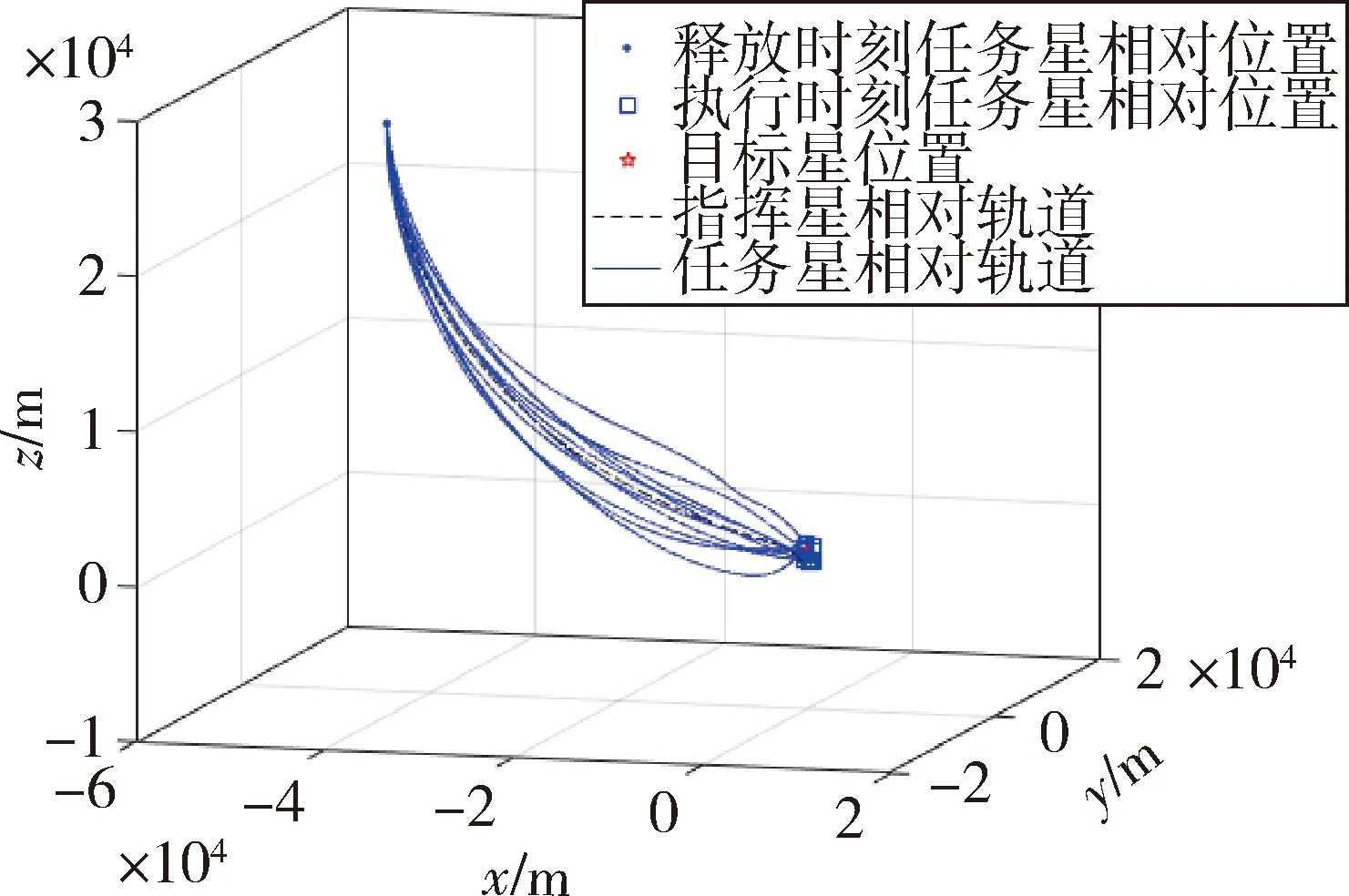
圖6 第2次任務軌道(目標探測)
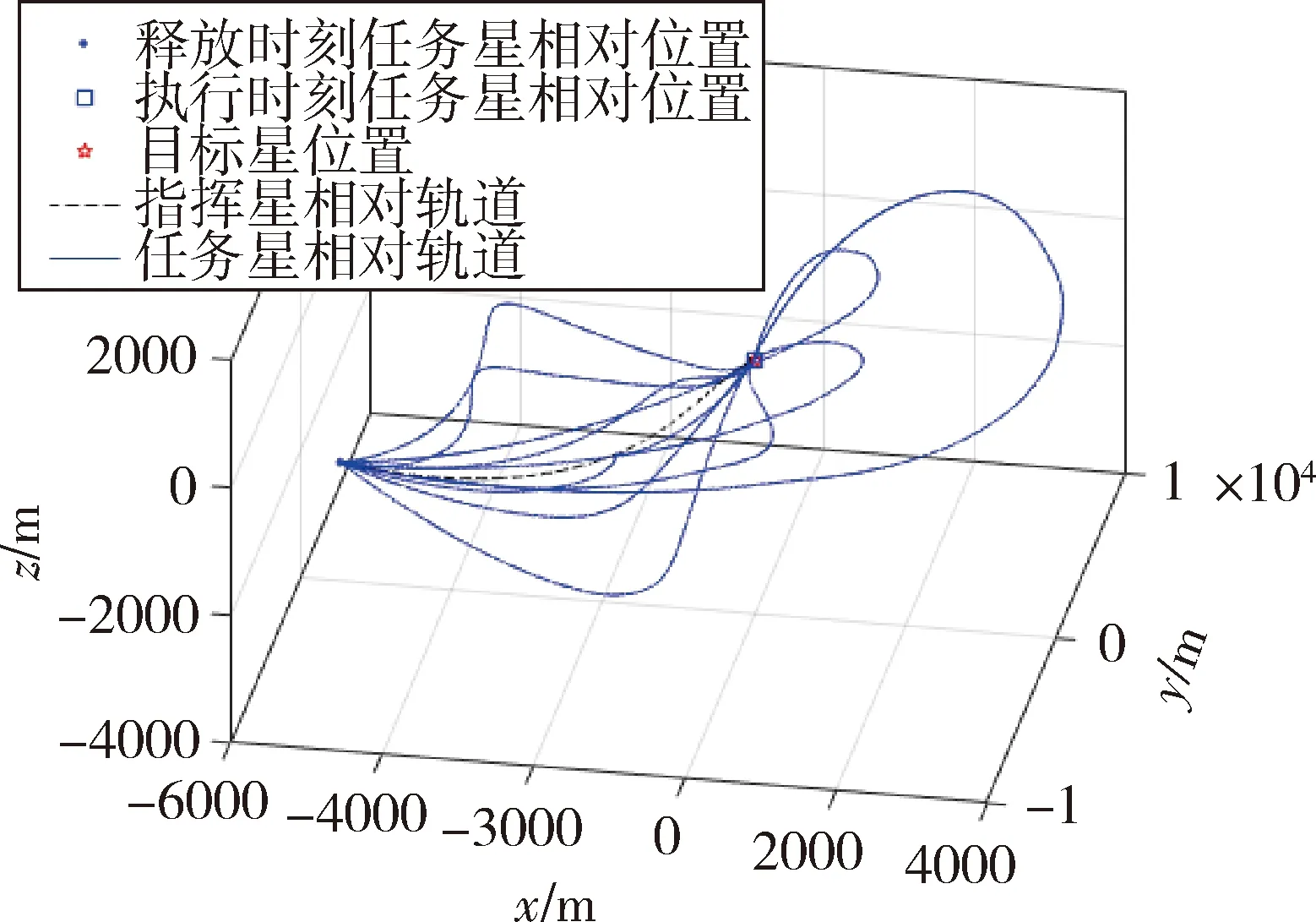
圖7 第3次任務軌道(目標交會)

圖8 第4次任務軌道(目標交會)
6 結論
針對空間任務復雜的特點,給出小衛星集群自主任務規劃方案、任務模式及數量選取策略和集群協同控制方法等關鍵技術,為小衛星集群系統執行復雜任務技術奠定基礎。提出基于多Agent系統的集群智能指揮與訓練決策方法,讓所有的集群個體圍繞共同任務目標,相互協調配合,完成獨立個體無法完成的任務。為提高小衛星集群個體配合執行任務時對目標探測的準確性,采用有效的協同制導和跟蹤控制,提高集群任務效果。通過對大量航天器進行動力學建模,構建態勢環境,設計智能指揮與決策策略,從指揮決策、協同飛行到末端制導進行全過程仿真,實現對小衛星集群真實任務場景的高可信度推演。小衛星集群化設計將有利于提高系統的適應性、穩定性和魯棒性,為未來開展更大規模集群建設提供技術支撐。