免耕播種機淺旋清茬斜置式防堵裝置設計與試驗
2022-09-14 05:19:44姚文燕趙殿報苗河泉崔培德魏懋健刁培松
農業機械學報 2022年8期
姚文燕 趙殿報 苗河泉 崔培德 魏懋健 刁培松
(山東理工大學農業工程與食品科學學院, 淄博 255049)
0 引言
小麥玉米接茬輪作是黃淮海地區主要的種植模式,近年來隨著保護性耕作技術的推廣和應用,對玉米免耕播種機具提出了更高的要求。目前小麥聯合收獲秸稈處理方式仍存在小麥秸稈粉碎過長、拋撒不均勻和留茬過高的現象,過量的殘茬對下茬作物的免耕播種造成了困難。此外,還田后的秸稈多浮于地表,短期內不易腐爛,殘留在播種帶上的秸稈直接影響后期玉米的生長[1-3]。
國內學者對麥秸覆蓋地免耕播種機防堵裝置進行大量的研究,根據秸稈流移動方向提出了被動清茬撥草輪齒式[4]和導草輥式[5]防堵裝置,但不適用于秸稈量較大的地區。根據“秸稈移位”提出了主動立式刀輥[6-7]、垂直刀齒式[8]、縱向彈齒式[9-10]和刀齒式[11-12]等新型防堵裝置,雖在一定程度上解決了玉米免耕播種問題,但存在功耗過大、殘茬撥離苗帶發生回填、沒被撥離的根茬易回彈等問題。國內學者對斜置清茬主要是以玉米原茬地為主,少有將斜置旋耕應用到麥茬地,現有的研究表明在特定條件下斜置旋耕可有效降低功耗,提高側拋量。針對旋切清茬,趙宏波等[13]設計了一種只有側切刃的旋切刀,將旋切刀運用到條帶式旋切后拋防堵裝置,實現降耗清茬的作用。針對傾斜刀齒側拋清茬,陳海濤等[14]設計了一種傾斜刀齒主動式防堵裝置,清秸刀回轉軸垂直面與機具前進夾角為20°,有效減少玉米殘茬向播種帶的拋撒量。在斜置旋耕方面,王國林等[15]最早提出一種刀輥與機組前進方向呈一偏角、可降低功耗的新型旋耕方式,并進行理論分析;孔令德等[16]對斜置旋耕進行了大量研究,在特定的條件下斜置角在15°~20°時,旋耕比功耗可達到最小值,且斜置旋耕與正置旋耕相比可有效地降低功耗;高建民等[17]提出斜置潛土逆轉旋耕,實現低能耗與短刀深旋耕的功能。上述研究為斜置淺旋清茬提供了理論和技術支撐。
本研究主要解決玉米免耕播種時小麥秸稈覆蓋量大的問題,在實現秸稈與土壤混埋時,增大秸稈殘茬側向拋出播種帶的距離,有效減少殘茬的回填率。通過理論分析與離散元相結合的方式,確定防堵裝置結構參數和影響工作性能的因素,結合土槽試驗對其工作性能進行驗證,以期為防堵裝置的設計提供理論依據。
1 防堵裝置結構設計與分析
1.1 防堵裝置工作原理
在不改變旋耕刀結構參數的基礎上,增大觸茬面積(切削寬度)和切茬角,防堵裝置結構簡圖如圖1所示。該裝置是由兩組旋耕裝置構成,每組配備2個旋耕刀(IT225型),旋耕刀固定于刀盤上,工作時刀軸帶動耕刀旋轉,旋耕刀回轉平面與機具前進方向呈一定的夾角,清茬時刀刃按與刀軸中心的距離先近后遠依次接觸秸稈土壤,對覆蓋在地表的秸稈及雜草進行切割與撥離,同時將部分殘茬側向拋出到苗帶一側,從而實現對苗帶的淺旋耕作。清茬后苗帶形成一條類似W形溝,利于施肥開溝器從溝內穿過,形成一條清潔的苗帶種床環境,可有效解決苗帶秸稈擁堵問題。
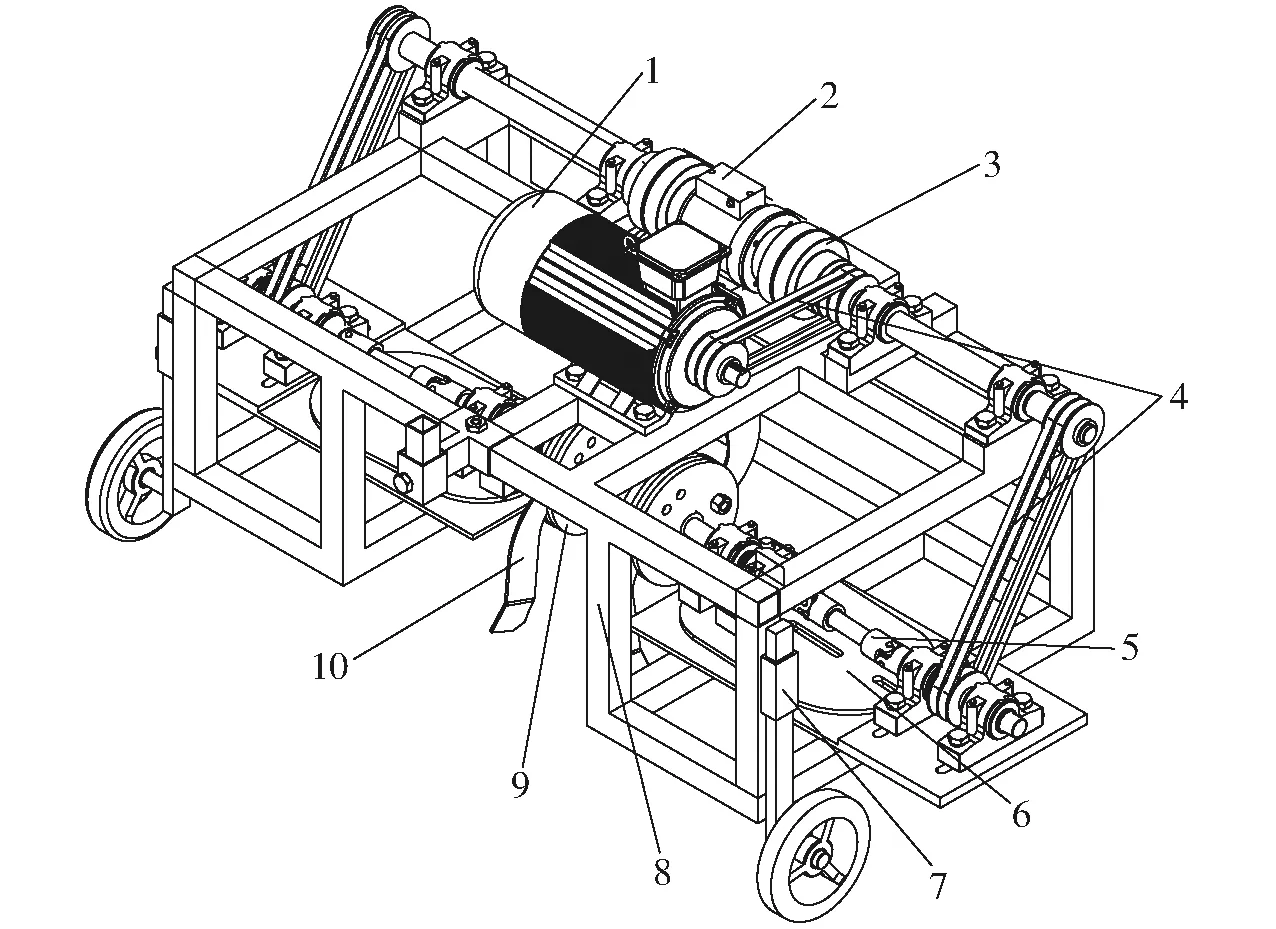
圖1 防堵試驗裝置結構簡圖Fig.1 Structure diagram of anti-blocking test device1.電機 2.扭矩傳感器 3.聯軸器 4.傳動帶 5.萬向聯軸器機架 6.角度調節裝置 7.深度調節裝置 8.機架 9.刀盤 10.耕刀
1.2 防堵裝置結構參數設計
1.2.1清茬幅寬
黃淮海地區小麥種植規格以傳統條播和寬苗帶播種為主,條播行距為120~180 mm,苗帶寬20~40 mm,3行為1幅;寬苗帶播種行距為280~300 mm,苗帶寬80~120 mm,均勻播種;玉米種植行距以600 mm為主,種植行距內小麥殘茬寬度具有不均勻性,寬度可達240 mm。過量的殘茬對開溝器作業造成困難,減少殘茬在播種帶上的堆積,需對清茬寬度做出要求。在淺旋清茬斜置式防堵裝置中單側耕刀清茬寬度為w1、兩組耕刀中間預留的最小未清茬耕作寬度為w2,清茬幅寬為W。結合圖2a可知,單側耕刀清茬寬度為

圖2 防堵裝置結構示意圖Fig.2 Structure diagrams of anti-blocking device
(1)
式中LBC——耕刀切土與離土徑向距離,mm
R——耕刀回轉半徑,mm
h——耕深,mm
θ——耕刀回轉平面與前進方向傾角,(°)
清茬幅寬為
(2)
由上述可知,在耕深與回轉半徑保持恒定時,清茬幅寬與傾角、最小未清茬耕作間距有關。
1.2.2最小未清茬耕作間距
在對裝置結構參數與作業過程分析中,最小未清茬耕作間距由裝置結構和作業要求決定。兩組耕刀在空間延長線的交點為M,折彎處展開線端點距離為LAA1,耕刀折彎處展開線端點到折彎處距離為LAB。工作時兩組耕刀在空間上最短接觸距離為耕刀折彎處,最小未清茬耕作距離為

(3)

(4)
目前玉米播種機常規圓盤開溝器開溝寬度為1.5~4 mm,鋤鏟式與芯鏵組合式開溝器開溝寬度為50 mm。考慮到刀型安裝問題,當兩組耕刀折彎處展開線端點距離為50 mm,耕深為50 mm,耕刀回轉半徑為225 mm,耕刀與機具前進方傾角為18.5°時,最小未清茬耕作間距100 mm,清茬幅寬277 mm。
1.2.3傾角
以耕刀頂點與土壤接觸最低點為坐標原點,建立坐標系O1xyz,x軸為耕刀回轉方向,與機具前進方向傾角為θ,y軸為苗帶清整方向,z軸為地面垂直方向,耕刀頂點在x、y、z軸方向的分速度為
(5)
式中v——機具前進速度,m/s
ω——耕刀角速度,rad/s
因耕刀在清茬過程中,一面旋轉,一面隨機具前進,因此耕刀的絕對運動是刀軸旋轉和機具前進兩種運動的合成,耕刀頂點的運動軌跡是余擺線。
在地面坐標系xO1y上,耕刀頂點的速度為
(6)
式中vxy——耕刀側推速度,m/s
在地面坐標系xO1z上,耕刀頂點的速度為
(7)
式中vxz——耕刀后拋速度,m/s
在坐標系O1xyz上,耕刀頂點的絕對速度為
(8)
式中vxyz——耕刀頂點的絕對速度,m/s
根據公式(6)~(8),利用Origin 2017繪制出機具前進速度為8 km/h、轉速為400 r/min和傾角為0°~90°時,耕刀頂點側推速度vxy、后拋速度vxz和絕對速度vxyz隨相位角ωt的變化曲線。由圖3可知,0°、45°、90°是θ的3個特殊傾角,當θ為0°時相同相位角內側推速度波動最大;當θ為90°時相同相位角內后拋速度、絕對速度保持不變;當θ在0°~45°時,耕刀側推速度、后拋速度、絕對速度三者相對于相同相位角內的速度波動相差較小;隨著θ的增加,θ趨近90°時相同相位角內3種速度的波動減小,后拋速度和絕對速度趨于平穩。根據耕刀的類型,傾角大于45°時,耕刀彎折角受力會隨之增大,不適用此刀型。因側推速度和后拋速度直接影響殘茬撥離苗帶的距離和土壤擾動系數,速度過大土壤擾動系數增加,過小不利于秸稈的清除。選取22.5°、30°、37.5°作為傾角,進行耕刀頂點速度變化趨勢分析,由圖3可知在此區間相同相位角內3種速度的波動相差不大。因此,結合公式與耕刀頂點變化曲線可知傾角的取值范圍為0°~45°,根據文獻[15-17]經綜合考慮選取15°~45°作為清茬裝置耕刀與機具前進方向傾角范圍。

圖3 耕刀頂點速度與位移變化曲線Fig.3 Curves of speed and displacement at top of rotary blade
1.2.4耕深
淺旋耕作時,耕刀動土量與工作幅寬、正切面彎折角、入土深度、正切刀面寬度有關,動土量越大,耕刀承受工作阻力也越大。條播耕作是以形成寬50~200 mm和深50~200 mm窄苗床帶的保護性耕作方法[18]。目前黃淮海地區玉米種肥深度一般在30~50 mm,底肥深度較大且宜采用分層施肥裝置,殘茬對其影響不大。小麥根系在土壤中沿豎向為上稠下稀,根系主要集中于離地表60 mm處,綜上在對耕刀耕深選取時,取h≤50 mm即可,本文試驗裝置通過限深輪來達到淺旋深度要求。
2 秸稈與土壤運動分析

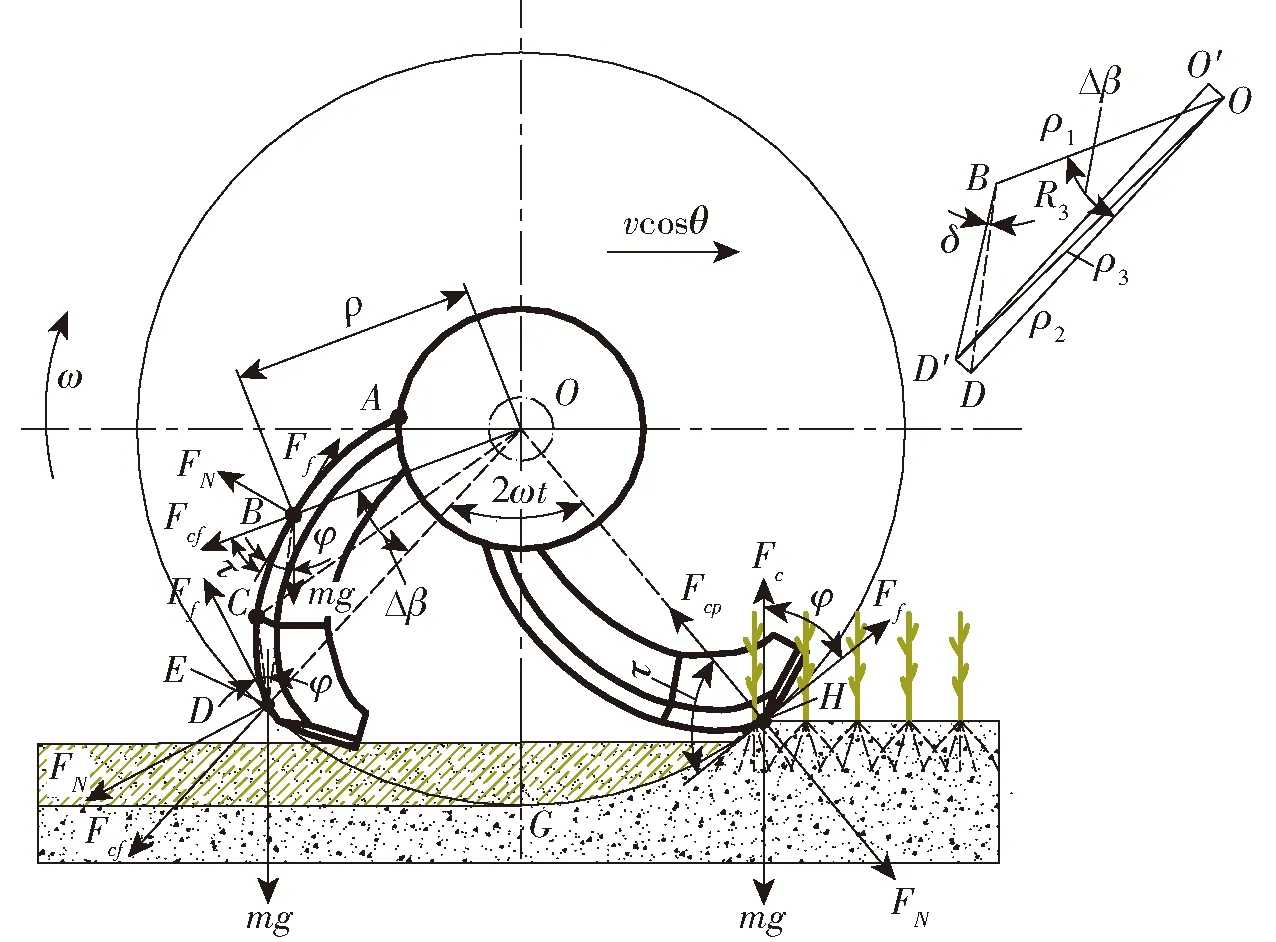
圖4 秸稈與土壤受力分析Fig.4 Stress analysis of straw and soil
耕刀到達點H時,在耕刀的作用下秸稈和土壤發生變形,撥茬入土受力公式為
(9)
式中φ——重力與摩擦力的夾角,(°)
μ——摩擦因數
τ——靜態滑切角,(°)
ρ——螺線極徑,mm
Fc——科氏力,N
Fcp——向心力,N
FN——耕刀對秸稈和土壤的壓力,N
Ff——耕刀與秸稈、土壤的摩擦力,N
m——秸稈和土壤質量,g
耕刀到達點D時,秸稈和土壤開始脫離耕刀,脫茬離土受力公式為
(10)
式中Fcf——離心力,N
由式(9)、(10)可得到耕刀在清茬過程中的兩個階段,秸稈與土壤運動應符合
(11)
秸稈與土壤在耕刀側切刃AC段時,耕刀側切刃符合等進螺線,根據側切刃等進螺旋線方程[17]可確定螺線極徑為
(12)
式中ρ0——螺線起點的極徑,mm
ρn——螺線終點處極徑,取205~215 mm
β——螺線上任意點的極角,rad
τn——螺線終點處的滑切角,取50°~60°
根據螺線起點的極徑和切土節距[20]關系可知
(13)
秸稈與土壤在耕刀正切刃CE段時,耕刀正切刃是一空間曲線,位于刀軸外圓柱面上,在與側切刃曲線面上的投影可近似圓弧,正切刃與側切刃的刃口過渡線此處不計。將正切刃沿折彎處展開在平面上,假設展開線同樣符合等進螺旋線,根據三角函數得到空間點D′到旋轉軸中心點的距離為
(14)
式中ρ1——點B處螺線極徑,mm
ρ2——點D處螺線極徑,mm
ρ3——點D′處螺線極徑,mm
Δβ——點B到點D螺線極角的增量,(°)
δ——正切部彎折角,(°)
由式(14)可知,折彎處正切刃任一點處對刀軸的扭矩大于具有相同極徑刀刃的耕刀(正切部無彎折),即在選擇耕刀時在滿足工作條件的基礎上選擇折彎角較小的耕刀。由圖4可得出在正切刃CE處,回轉半徑R3等于ρ2。通過上述分析可知,秸稈與土壤在側切刃AC處時,回轉半徑R滿足式(12);在正切刃CE處時,回轉半徑R滿足式(14)。將耕刀不同刃點處回轉半徑代入式(11)可得耕刀側切刃AC段與正切刃CE段有
(15)
(16)
由式(15)、(16)可以看出,在作業參數確定的情況下,秸稈與土壤在刀刃上的受力與滑切角、極角、重力與摩擦力的夾角、正切部彎折角相關。當刀刃弧度增加時,滑切角減小,重力與摩擦力的夾角增大,極角減小,可為后期耕刀的優化設計提供參考。在耕刀類型確定的情況下,耕刀在不同刃點的受力情況與機具前進速度、刀軸角速度、傾角和耕深相關。因此,本研究是在耕刀類型和耕深確定的情況下,以前進速度、刀軸轉速和傾角為影響因素進行試驗。
3 防堵裝置參數仿真優化
3.1 仿真模型與試驗設計
為提高計算機處理效率,根據試驗仿真要求在EDEM中建立土槽簡化模型。土槽尺寸為6 000 mm×600 mm×240 mm(長×寬×高),其中秸稈、土壤覆蓋整個土槽模型,土壤顆粒直徑設置為8 mm,秸稈模型采用直徑為10 mm、球心間距為5 mm的球體組合成總長為100 mm的長線型。顆粒與顆粒、顆粒與幾何體(耕刀)之間的接觸模型和參數見文獻[21-23]。土槽模型完成后,秸稈層位于土壤層上方,土壤顆粒靜態填充土槽深度約為50 mm,根據提取的數據得到秸稈根數為2 000。通過離散元模擬防堵裝置在田間作業過程,以秸稈清除率、土壤擾動系數和功耗為評價指標,并在秸稈量一定的情況下對影響作業性能的主要因素刀軸轉速、前進速度和傾角進行顯著分析,根據需求對試驗參數進行優化,確定最優的參數組合,試驗因素編碼如表1所示。
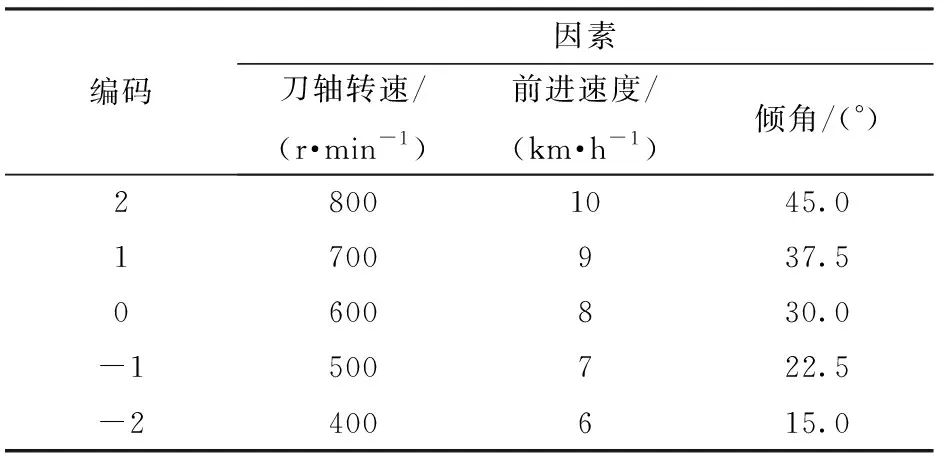
表1 試驗因素編碼Tab.1 Experimental factors and codes
(1)秸稈清除率測定:在距離耕刀工作開始位置 1 500 mm處,選取600 mm(寬)×1 000 mm(長)×100 mm(高)的網格(圖5)。按步長0.1 s輸出網格上秸稈的根數,統計未耕作與耕作后網格上秸稈的根數,計算秸稈清除率。

圖5 秸稈清除率測定Fig.5 Determination of straw cleaning rate
(2)土壤擾動系數:通過仿真軟件的clipping功能,選取距中心點-1 000 mm、層厚為100 mm處,作為防堵裝置通過的切平面,近似計算出剩余物料的截面積。土壤與秸稈在耕刀通過前后的寬度與深度測量如圖6所示,土壤擾動系數計算公式為

圖6 橫截面積測定Fig.6 Determination of cross-sectional area
(17)
式中r——土壤擾動系數,%
S——未耕作時橫截面積,mm2
S1——耕作后橫截面積,mm2
(3)功耗測定:根據轉速、轉矩和功耗的關系,提取所有顆粒在整個仿真過程中每一步施加到防堵裝置的轉矩,計算得出工作過程中裝置的功耗
(18)
式中P0——仿真過程總功耗,kW
T——仿真全過程的總轉矩,N·m
n——耕刀工作過程中的轉速,r/min
3.2 試驗結果與分析
3.2.1回歸模型建立與方差分析
運用Design-Expert對裝置參數進三元二次回歸正交旋轉組合試驗(中心點為9),對仿真結果進行回歸分析與顯著性檢驗。試驗方案與結果如表2所示,A、B、C為因素編碼值。
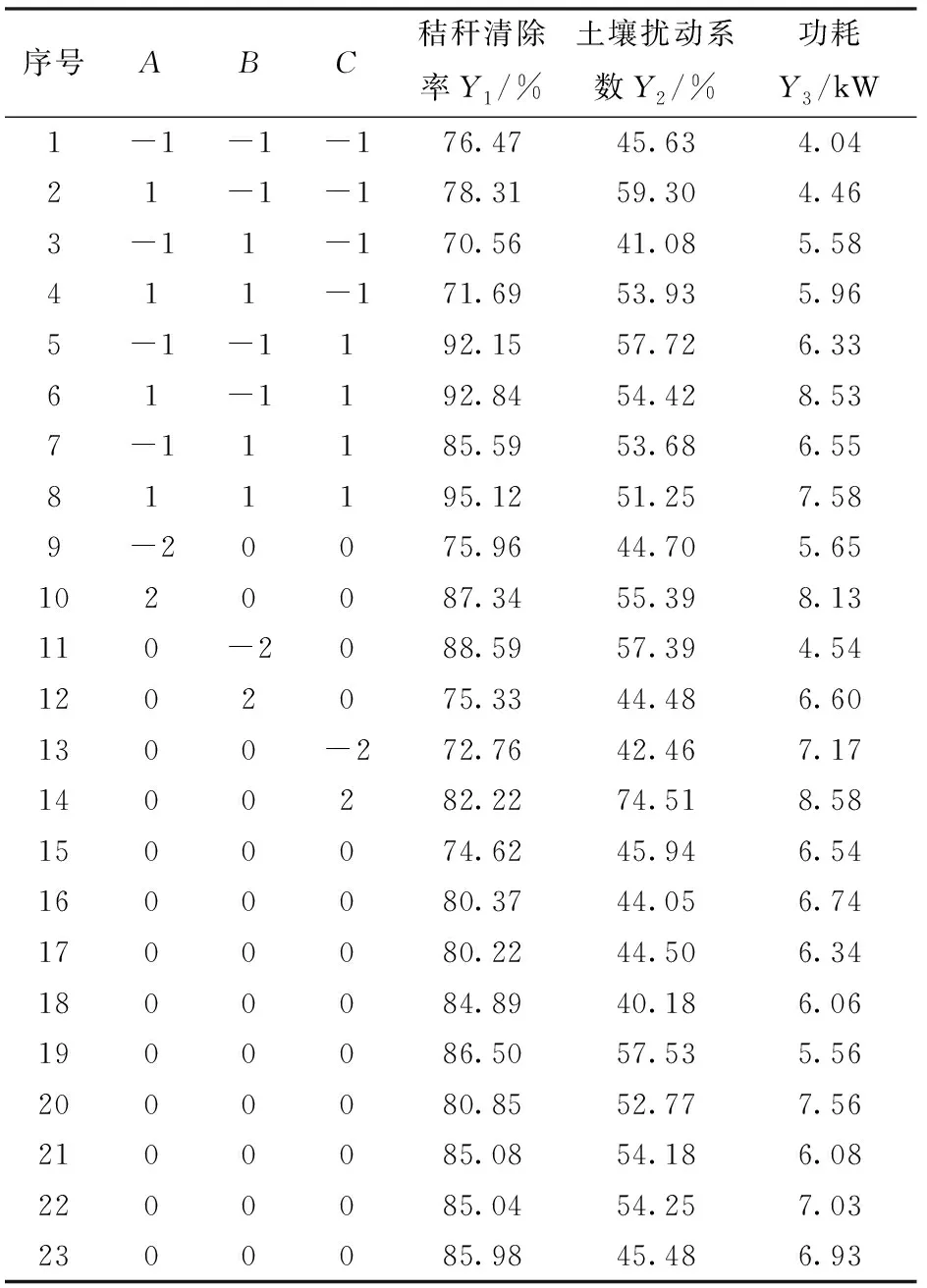
表2 試驗方案與結果Tab.2 Test scheme and results
(1)秸稈清除率
秸稈清除率試驗結果方差如表3所示。整體試驗結果顯著(0.01≤P<0.05),刀軸轉速、前進速度、傾角對秸稈清除率影響分別為較顯著、顯著、極顯著,交互項與二次項對響應值都不顯著,各因素對響應值的影響主次順序是C、B、A。剔除不顯著因素后,得到各因素水平對秸稈清除率影響的回歸方程為
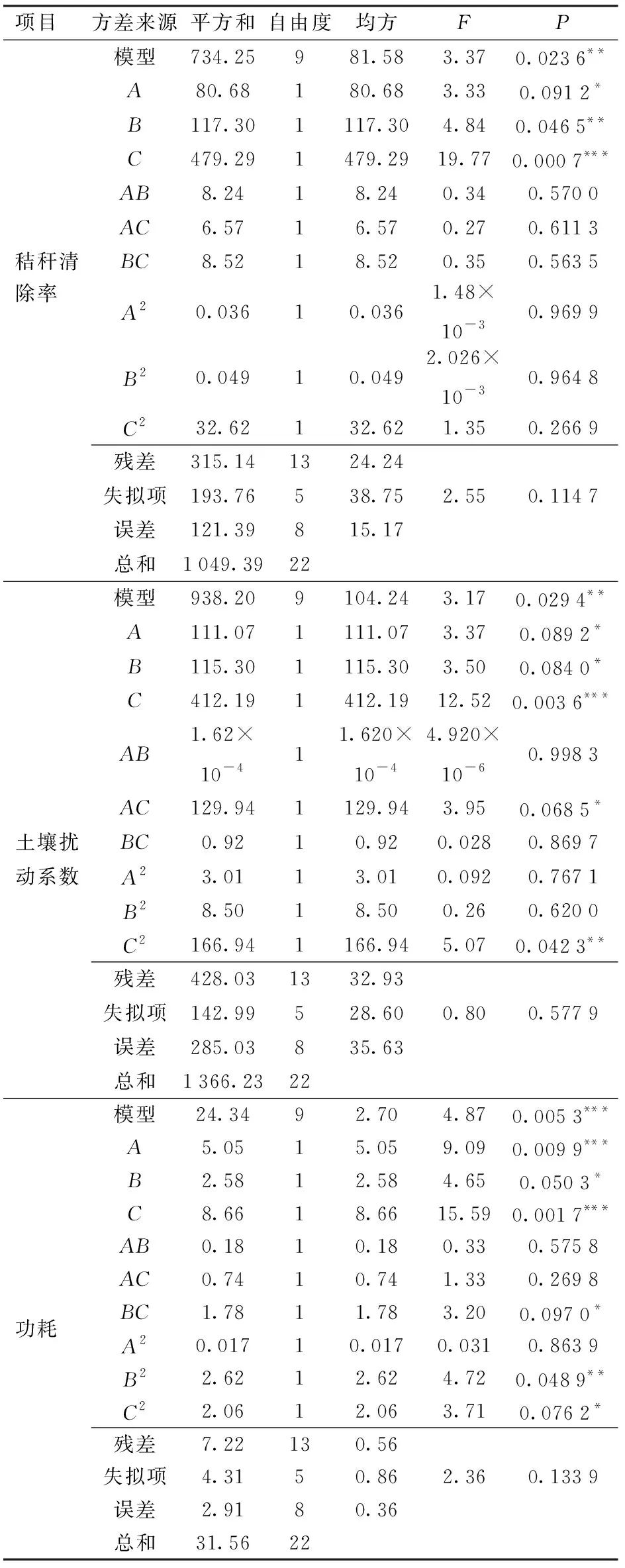
表3 性能指標方差分析Tab.3 Analysis of variance of performance index
Y1=82.11+2.25A-2.71B+5.47C
(19)
對方差進行失擬性檢驗P=0.287 8,不顯著(P>0.1),表明試驗分析結果合理,回歸方程擬合度高。模型決定系數R2在剔除不顯著因素前后分別為0.699 6、0.645 4,表明該模型可以擬合65%以上的結果,用來進行試驗預測。
(2)土壤擾動系數
土壤擾動系數整體試驗結果顯著(0.01≤P<0.05),刀軸轉速A、前進速度B、傾角C對土壤擾動系數影響分別為較顯著、較顯著、極顯著,刀軸轉速A與傾角C交互項以及傾角C的二次項對土壤擾動系數影響顯著,其余項對響應值都不顯著。各因素對響應值的影響主次順序是C、B、A。剔除不顯著因素后,得到各因素水平對土壤擾動系數影響的回歸方程為
Y2=49.45+2.63A-2.68B+5.08C-4.03AC+2.34C2
(20)
對方差進行失擬性檢驗P=0.851 6,不顯著(P>0.1),表明試驗分析結果合理,回歸方程擬合度高。模型決定系數R2在剔除不顯著因素前后分別為0.686 7、0.678 4,表明該模型可以擬合68%以上的結果,用來進行試驗預測。
(3)功耗
功耗試驗結果方差如表3所示,整體試驗結果極顯著(P<0.01),刀軸轉速A、前進速度B、傾角C對功耗影響分別為極顯著、較顯著、極顯著,前進速度B與傾角C交互項對功耗影響較顯著,前進速度B的二次項對功耗影響顯著,傾角C的二次項對功耗影響較顯著,其余項對響應值都不顯著。各因素對響應值的影響主次順序是C、A、B。剔除不顯著因素后,得到各因素水平對功耗影響的回歸方程為
Y3=6.49+0.56A+0.4B+0.74C-0.47BC-0.31B2+0.27C2
(21)
對方差進行失擬性檢驗P=0.212,不顯著(P>0.1),表明試驗分析結果合理,回歸方程擬合度高。模型決定系數R2在剔除不顯著因素前后分別為0.771 2、0.741 4,表明該模型可以擬合74%以上的結果,用來進行試驗預測。
3.2.2響應面分析
利用Design-Expert軟件對試驗結果進行分析處理,得到轉速、傾角和前進速度交互作用對土壤擾動系數與功耗的響應曲面,如圖7所示。
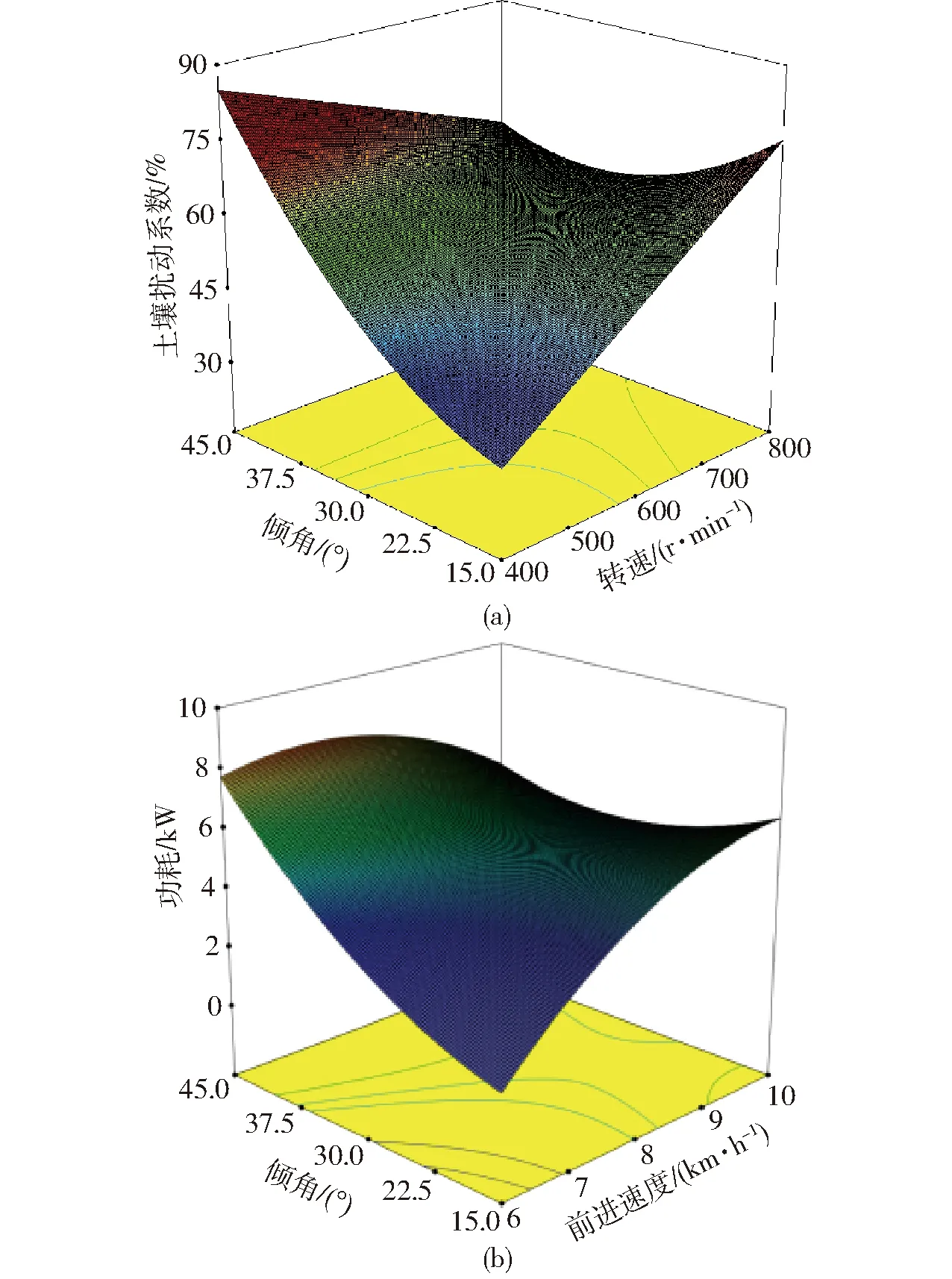
圖7 交互因素對各指標影響的響應曲面Fig.7 Response surfaces of interaction factors to indexes
前進速度為6 km/h時,轉速和傾角交互對土壤擾動系數影響如圖7a所示,土壤擾動系數隨著傾角與轉速的增加而增加。當轉速為400~645 r/min時,土壤擾動系數隨傾角的減小而減小,轉速為645~800 r/min時趨勢相反,在土壤擾動系數較小的情況,轉速的最優取值范圍為400~645 r/min。當傾角為15°~35°時,土壤擾動系數與轉速正相關;當傾角為35°~45°時,土壤擾動系數與轉速負相關,傾角的最優取值范圍為15°~35°。當轉速為400 r/min時,前進速度和傾角交互對功耗影響如圖7b所示,當速度為6~8.4 km/h時,功耗與傾角正相關,在8.4~10 km/h時負相關;當傾角為15°~37.5°時,功耗與速度正相關,37.5°~45°時負相關。
3.2.3參數優化
為獲得較優工作性能參數,對回歸模型進行優化求解,根據實際作業條件和工作要求,選擇目標函數和約束條件,目標函數及約束條件為
(22)
在對仿真參數進行響應面分析時,得到參數最優的組合為:轉速400 r/min、前進速度6 km/h、傾角18.5°,此時秸稈清除率為74.5%、土壤擾動系數為34.7%、功耗為1.36 kW。
4 室內土槽試驗
4.1 試驗設備與材料
本研究試驗在土槽中進行(圖8),臺架裝置固定到臺車上,臺車提供試驗裝置恒定的前進速度和準確的作業深度,電機通過變頻器為試驗提供刀軸所需轉速,角度調節裝置和萬向節聯軸器實現0°~45°范圍內傾角調節。試驗過程中工作扭矩和轉速通過動態扭矩傳感器HCNJ-101、雙路信號轉換模塊MKMN-2將數據傳輸到便攜式計算機,M400軟件實時記錄裝置轉速-扭矩動態變化。

圖8 土槽試驗Fig.8 Soil bin test
本試驗采用土槽內原有的砂壤土,耕作前將土壤進行充分灌溉,待土壤層可進行耕作時進行旋耕粉碎,利用臺車自帶的鋤鏟與壓實裝置對土壤耕作層進行壓實、整平,通過土壤水分儀(STEPS3000型)和土壤緊實度測量儀(TJS-450G型)測定含水率與耕作層土壤堅實度。將收集的未經處理的田間小麥秸稈均勻鋪放在1.5 m×5 m的土壤層表面,秸稈覆蓋量為0.5 kg/m2,小麥秸稈含水率為7.24%,滿足小麥殘茬覆蓋率要求,測定土壤堅實度與含水率時隨機在防堵裝置前進方向選取3點,計算其平均值,試驗時測定結果為:土壤0~5 cm、5~10 cm 土層內土壤平均含水率為3.45%、9.08%,土壤堅實度為2.5、3.1 MPa。
4.2 試驗內容與方法
根據仿真試驗結果,傾角選取0°(對照組)和18.5°(試驗組),刀軸轉速400 r/min,臺車前進速度6 km/h,耕深50 mm,最小未清茬耕作間距100 mm為作業參數,對防堵裝置試驗臺進行防堵性能試驗,以殘茬秸稈量[24]、苗床參數[25-26]和功耗為指標對防堵性能參數進行測定。
(1)殘茬秸稈量的測定。單次試驗完成后在測試區內,收集浮在地表的秸稈,忽略掩埋在土壤層中的秸稈,稱量剩余秸稈的總質量,計算秸稈清除率。
(2)苗床參數。苗床參數主要包含土壤擾動系數、溝形、動土率(≤40%)、溝深和土壤回填率等。工作時耕作深度保持不變,在測試區內工作幅寬上隨機選取防堵裝置通過后的橫截面3處,在橫截面處用硬紙板繪制溝形[27]。為便于計算溝形面積,在測量時忽略溝形內側面不平整區域,近似計算剩余物料的橫截面積,得出該裝置的土壤擾動系數。測量完成后取出溝槽內的土壤計算土壤回填率,并測量最低點距離地表的深度。
(3)功耗與力測定。由于試驗裝置無法精確采集耕刀與地表接觸點的瞬時功耗和阻力,本試驗是在耕刀平穩工作后,通過提取動態扭矩傳感器數據得到耕刀功耗。通過六分力裝置得出工作過程中測力架水平合力、垂直合力和側向合力。扭矩傳感器和六分力傳感器輸出頻率為10 Hz。
4.3 試驗結果與分析
4.3.1清茬效果分析
耕刀的清茬效果主要通過土壤表層的殘茬秸稈量進行衡量。試驗開始前先進行防堵裝置單刀土槽試驗,確定合適的測試區域,試驗結果如圖9所示。在土壤疏松區域,犁溝一側形成混合物料凸起層(圖9b),不符合實際田間作業土壤堅實度。為符合實際田間土壤環境,選取土壤堅實度適中的區域進行試驗,通過試驗得到土壤層堅實度不小于1.5 MPa(0~5 cm)(圖9a)。
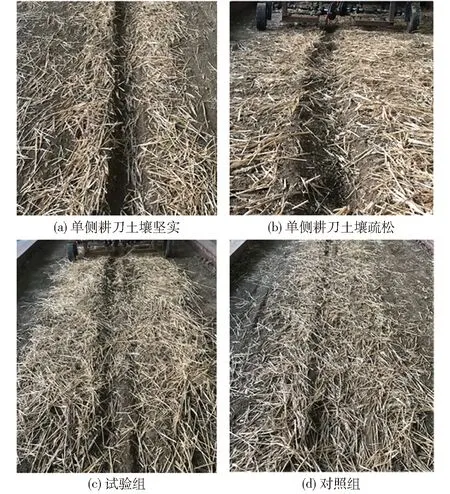
圖9 試驗結果Fig.9 Experiment results
試驗指標數據如表4所示,通過對試驗數據分析,試驗組在轉速400 r/min時,秸稈清除率為92.5%,對照組秸稈清除率為82.5%,秸稈清除率提高14.7%。通過圖9c與圖9d可以看出,傾角的增加使秸稈側拋量增加,可有效減少秸稈回填到種溝,同時可以看出苗床上殘留的秸稈量減少,未耕作區域秸稈殘留量明顯小于傾角0°,對苗床秸稈清整效果明顯。

表4 試驗結果Tab.4 Experiment results
4.3.2苗床參數
在試驗過程中單個耕刀會在土槽內形成一個U型溝,隨著轉速的增加切土節距增大、土壤的碎土率提高、溝底內的凸起高度減小。防堵裝置在鋪滿秸稈的土槽內工作時會在苗帶上形成W溝型,但由于耕刀、秸稈和土壤的相互作用造成底部和溝兩側不規則,溝型截面形狀如圖10所示,耕刀耕深不變,L為工作幅寬,L1為理論耕刀單側動土寬度,L2為傾角18.5°時動土寬度,L3為傾角0°時動土寬度,傾角的增大,造成溝型邊界增大,在中部形成的凸起邊界相差不大。
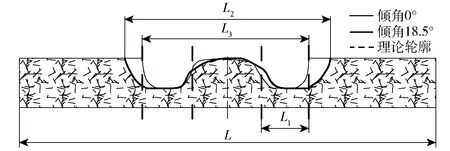
圖10 溝型邊界線Fig.10 Groove boundary line
動土率是保護性耕作少耕播種作業時的動土程度,與地表動土寬度和工作幅寬有關,本研究為進一步體現防堵裝置的工作性能,將土壤擾動系數和土壤回填率也作為苗床參數的指標。參照對照組可知傾角的增加會導致土壤擾動系數、動土率和土壤回填率的變化,試驗結果數據見表4,相對于對照組苗床參數分別提高72.1%、33.2%和降低5.0%。傾角的增大導致清茬幅寬的增加,對土壤擾動系數與動土率影響較大,對土壤回填率影響較小,整體相差不大,苗床參數符合國家標準要求。
4.3.3功耗
相位角是表征切土位置的重要參數,耕刀處于不同的相位角時與土壤接觸狀態不同,受力也不同[28]。耕刀在旋轉過程中切入土壤時的時間不同,反映在扭矩傳感器與六分力傳感器上的數值不同。根據圖2a所示,相位角的大小為ωt,當相位角為0°時達到最大入土深度,耕刀開始撥茬切土和脫茬離土時相位角與耕深和回轉半徑有關。本研究土槽試驗耕刀回轉半徑225 mm、耕深50 mm,得到相位角為321°時開始切土,相位角39°時出土,在一個旋轉周期內耕刀耕作占22%。根據試驗得到轉速在400 r/min時,對照組與試驗組功耗相差不大。傾角為18.5°時,功耗為1.51 kW(表4),與傾角0°相比功耗增加4.7%。
水平合力反映了機具前進方向的阻力,垂直合力反映了機具重力方向的合力,對工作穩定性具有重要影響,側向合力反映了機具工作時左右兩側合力,影響機具的平穩性。根據六分力傳感器得到測力架的水平合力、垂直合力和側向力合力如圖11所示,水平合力在不同傾角下,運動趨勢相同,整體相差不大,而垂直合力與側向合力在傾角0°時明顯高于傾角18.5°,且與合力反向(圖11)。為更明確裝置工作時的受力情況,將試驗開始時測力架所受合力與清茬工作時測力架所受合力進行分析得到耕刀清茬時的三向阻力(表4),根據試驗數據可知傾角的增大會導致水平阻力與側向阻力的增加,垂直阻力減小,這與理論分析結果相符。
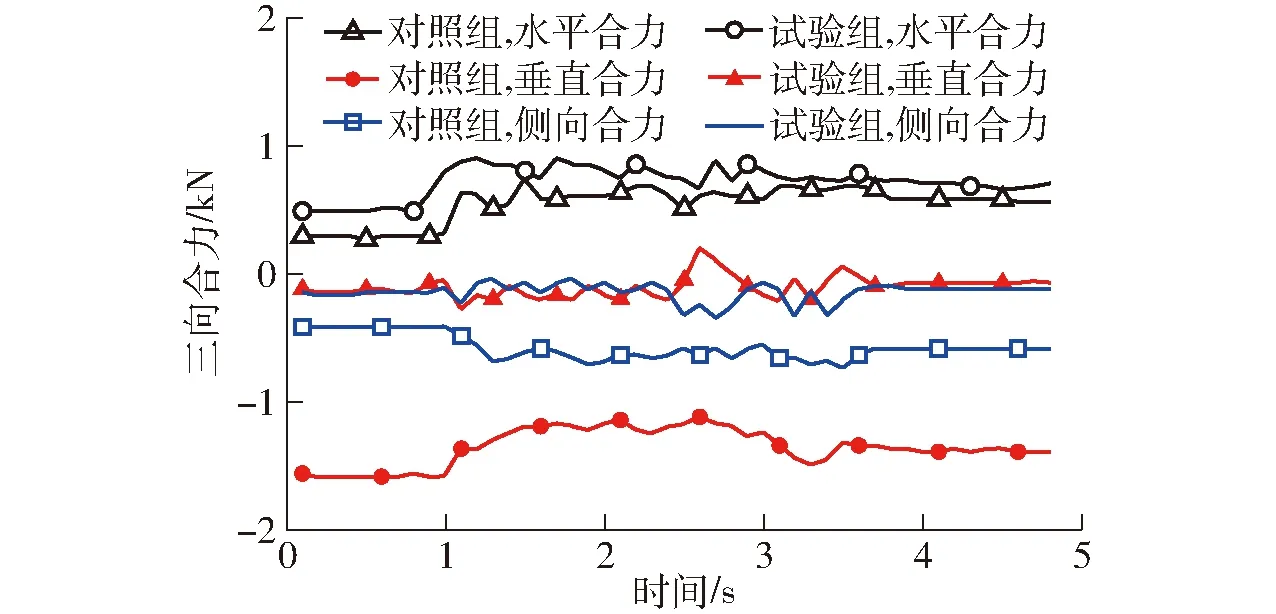
圖11 測力架三向合力變化曲線Fig.11 Variation curves of three-dimensional resultant force of dynamometer
5 結論
(1)設計了一種主動式淺旋斜置式防堵裝置,通過理論分析確定裝置的結構參數(傾角、回轉半徑、刀軸相對位置)和作業參數(耕深、清茬幅寬、清茬耕作間距)以及兩者之間的關系。根據裝置結構,對防堵作業過程中殘茬與土壤進行受力分析,確定前進速度、刀軸轉速和傾角為主要影響因素。
(2)運用EDEM仿真試驗,模擬裝置在田間作業過程,以秸稈清秸率、土壤擾動系數和功耗為評價指標,對影響作業性能的刀軸轉速、前進速度和傾角進行顯著性檢驗。根據實際作業條件和工作要求,在滿足防堵性能試驗情況下最優參數組合為轉速400 r/min、前進速度6 km/h、傾角18.5°,此時秸稈清除率為74.5%、土壤擾動系數為34.7%、功耗為1.36 kW。
(3)將扭矩傳感器與六分力傳感器結合,在土槽試驗平臺上對防堵裝置進行臺架試驗,工作參數在轉速400 r/min、前進速度6 km/h、傾角18.5°時,秸稈清除率為92.5%、土壤擾動系數為29.6%、功耗為1.51 kW,其余性能參數滿足作業要求。相同條件下與傾角0°對比分析,秸稈清除率與秸稈側拋量提高,整體苗床參數相差不大,功耗增加,水平阻力與側向阻力增加,垂直阻力減小。
