基于人工智能控制策略的微電網自動調度優化方案
2022-09-14 06:16:56陳亞瓊馬瀟予曾小鳳張克誠管鑫
電器工業 2022年9期
陳亞瓊 馬瀟予 曾小鳳 張克誠 管鑫
(1.國網甘肅省電力公司培訓中心 2.國網甘肅省電力公司酒泉肅州區供電公司3.國網甘肅省電力公司臨夏供電公司)
0 引言
隨著全球能源危機的日益加劇以及環境問題的持續惡化,世界各國都在對風能、太陽能等新型能源進行研究,加大新能源的利用占比,逐步取代原有的化石型能源,新能源的應用必須先以分布式電源、儲能裝置的形式接入微電網,通過微電網進行控制后才能夠接入主電網,因此對微電網的運行模式進行合理的調度優化是保證新能源高效利用的關鍵。
本文所研究的微電網自動調度優化問題實質上是基于多約束條件的單目標優化問題。微電網能夠進行調度優化的前提是電網能夠接入主電網運行,通過微電網內部的調度優化以及與主電網的配合運行,向負荷提供高質量的能源。本文針對包含有多種分布式電源、儲能裝置、可控負荷的微電網,以微電網的運行成本為優化目標,構建微電網調度模型,采用人工智能控制策略進行模型的求解。通過仿真實例進行深入分析,人工智能控制策略能夠實現微電網的自動化調度。
1 微電網架構
電網的負荷重要性存在一定的差異,通常情況下可以劃分為三種,即核心負荷、重要負荷、常規負荷,三種類型的負荷分別配置在三條配電網饋線上,以便實現對負荷的分級控制,微電網通過公共結點接入到主電網中,并網運行,微電網的具體調度架構如圖1所示。

圖1 微電網調度架構
微電網的分布式電源又可以分為新能源發電單元(包括風力發電單元、光伏發電單元)和常規發電單元(火力發電單元),分布式電源所發出的電能除向主電網輸送外,還可以輸送到儲能裝置進行存儲,當達到特定的外部條件時,儲能裝置會向外輸出電能,為微電網中的負荷供電。
2 分布式電源數學模型
該微電網包含多種形式的分布式電源,如光伏發電、風力發電、火力發電等,還包括儲能裝置和負荷。
2.1 光伏發電數學模型
光伏發電的輸出功率與光照強度、功率點極大值的跟蹤控制、光伏陣列的受光面積、光伏電池的工作效率、光線的入射角度相關聯,其輸出功率的數學表達式:

式中,v為光照強度;λpV為最大功率點跟蹤控制效率;UpV為光伏陣列面積;ρpV為光伏電池工作效率;θ為太陽光入射角度。
2.2 風力發電數學模型
風力發電的輸出功率由當前風速和風力發電機的額定功率相關聯,風力發電的輸出功率為:

式中,vin為風力發電機并網發電風速下限;vout為風力發電機并網發電風速上限;vR為風力發電機的額定風速;PR為風發電機的額定輸出功率。
2.3 火力發電數學模型
火力發電成本可以通過如下公式進行數學描述:

式中,CCoal為燃料出售價格;ωCoal為燃料的熱凈值;PFire(t)為火力發電機組當前實時輸出功率;PFire(t)為火力發電機組當前實時工作效率。
2.4 儲能裝置數學模型
當儲能裝置工作在充電狀態時,其功率方向向內,即輸出功率為負,當前時刻的存儲能量為:

當儲能裝置工作在放電狀態時,其功率方向向外,即輸出功率為正,當前時刻的存儲能量為:

式中,Soc(t)和Soc(t-1)為當前時刻和前一時刻的儲能裝置存儲的能量;PBattle(t)為儲能裝置的實時輸出功率;ηC和ηD為儲能裝置的充電和放電效率。
3 微電網調度模型
3.1 調度目標函數
保證微電網運行效益的最大化就是通過對微電網的運行狀態進行調度,調節微電網中各個分布式電源和儲能裝置的運行狀態,實現微電網運行成本最低。則微電網的調度目標函數可以描述為:

式中,CCoal(t)為火力發電的燃料成本;CDep(t)為電力設備的折舊成本;CKeep(t)為電力設備運營保養成本;CCut(t)為負荷切除補償成本。
3.2 自動化調度約束條件
(1)系統功率約束條件

式中,PWind(t)為風力發電單元的輸出功率;PPV(t)為光伏發電單元的輸出功率;PBattle(t)為儲能裝置的輸出功率;PCoal(t)為火力發電單元的輸出功率;P(t)為微電網的負荷需求。
(2)分布式電源功率約束條件

式中,Pi,min為所有的分布式電源輸出功率的最小值;Pi,max為所有的分布式電源輸出功率的最大值。
(3)功率傳輸約束條件

式中,Pgrid,min為功率傳輸的最小值;Pgrid,max為功率傳輸的最大值。
(4)儲能裝置運行約束條件

式中,PBattle,Min為儲能裝置充電功率的最小值;PBattle,Max為儲能裝置充電功率的最大值;SocMin為儲能裝置允許容量的最小值;SocMax為儲能裝置允許功率的最大值。
4 人工智能控制策略
4.1 控制策略基本原理
在微電網自動調度上采用蜂群策略,該策略是基于蜂群的搜索行為而產生的一種人工智能算法,在全局最優解和局部最優解求解方面性能優異,尤其適用于本文這種單目標優化問題,基于多約束條件對單目標最優解進行求解。單目標優化問題會涉及一個收斂性指標,并且要求蜂群搜索到的最優解位于樣本空間中,由此便解決單目標優化問題,將蜂群策略應用到單目標的微電網自動化調度控制。
4.2 基本蜂群算子
(1)起始時段
在這個時段,需要對蜂群樣本的具體參數進行初始化設置,具體有樣本空間維度、樣本集合數量、控制參數、迭代參數、食物源數量參數等,然后基于設定好的參數對蜂群樣本集合進行初始化:
假定食物源Nj=(nj1,nj2, … ,njM)為蜂群樣本集合中第j個食物源的當前所處位置,M為蜂群樣本集合的空間維度,在這個空間中,每個食物源的起始位置描述如下:

式中,m=1, 2, …,M;Qm和Xm分別是整個蜂群樣本集合空間中第m個維度的集合空間邊界;Randi.m是區間[0,1]上的均勻分布隨機數。
(2)雇傭蜂時期
雇傭蜂在進行搜索時,一旦搜索到食物源后對食物源的具體參數進行存儲,并將數據傳輸給輔助蜂。對于蜂群樣本空間中的任意一個食物源,雇傭蜂是隨機選擇路徑進行食物源搜索的,搜索到的食物源位置為:

式中,j為雇傭蜂;i為雇傭蜂所處的當前維度;t為其他隨機選取的雇傭蜂;Randi.i是區間[0,1]上的均勻分布隨機數。再對雇傭蜂的匹配度參數進行綜合評價,以確定哪個匹配度更好,并確定為當前認定的雇傭蜂。
(3)輔助蜂階段
輔助蜂會分析從雇傭蜂傳輸來的食物源具體參數,以確定從哪個方向開采食物源,在這個時段輔助蜂會根據自己的匹配度參數運算出對應的進化概率,以選取最優輔助蜂個體進行深度尋優。蜂群樣本空間中的第j個樣本個體的進化概率,可以由如下數學公式進行描述:

式中,S為蜂群樣本空間中的樣本的個數;mat(ni)為匹配度函數,進化概率越大意味著輔助蜂的在高質量食物源附近進行食物搜索的概率就越高。
(4)搜尋蜂時段
當雇傭蜂和輔助蜂附近食物源被完全搜索完畢或在規定搜索次數內無法搜索到新的食物源時,雇傭蜂會變身為搜尋蜂,根據式(12)的位置描述,進行位置變換,繼續展開搜索,直至達到搜索結束條件,再進行下一步動作。
5 實例分析
以某地微電網為例進行分析,該微電網架構與圖1中所描述的微電網架構完全一致,對本文提出的人工智能控制策略進行驗證,該微電網的容量上限為100kVA,微電網的電壓等級為400V。在滿足微電網的多重調度約束條件下,分布式電源中的光伏發電和風力發電均工作在最大功率跟蹤模式下,因此火力發電以及儲能裝置是進行優化主要控制對象。當光伏發電和風力發電總的輸出功率超過負荷所需功率時,火力發電的輸出功率應當保持在最低水平,儲能裝置從外部吸收電能,工作在充電狀態;當光伏發電、風力發電、火力發電,儲能裝置的輸出功率均達到極限時,所能提供的能量無法滿足系統所需負荷,應當根據負荷重要性為依據,適當切除重要性等級較低的負荷。
以發電運行成本最低目標進行運算,最終得到一天24h調度方案如圖2所示。
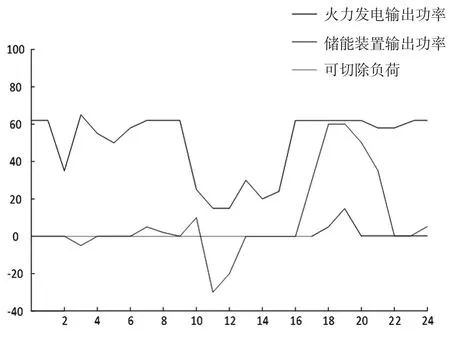
圖2 微電網自動化調度方案
由調度方案中數據可知,在12~13時的時間段之內光伏發電和風力發電的總輸出功率超過系統負荷所需功率,基于火力發電停機會造成成本損耗的原則,所以此時火力發電保持最低功率輸出運行,多余電能傳輸到儲能裝置進行能量存儲,在18~19時的時間段內,微電網中的光伏發電、風力發電、火力發電處于滿負荷運行狀態,微電網所能夠輸出的總功率無法滿足負荷的需求,適當切除部分重要性等級較低負荷,保證重要性等級較高負荷的工作。
6 結束語
本文研究微電網并網模式下的自動化調度方案,基于多種外部和自身約束條件下,以發電運行成本最低為優化目標,搭建微電網自動化調度模型,采用人工智能策略進行模型的最優解尋取,仿真結果表明,本文所提出的人工智能策略的收斂性更好、收斂速度更快,很好地實現了微電網調度的發電成本最低目標,解決了微電網在并網運行模式下的自動化優化調度問題。
