無人機巡檢系統自主導航定位技術研究
2022-09-14 03:00:50趙國欣
江西電力 2022年7期
李 杰,趙國欣
(黃河水利職業技術學院,河南 開封 475004)
0 引言
小型旋翼無人機常用的導航方式是基于GPS/INS 的組合模式,該模式需要通過采集GPS 信號,才可以達到穩定飛行的狀態,但現實復雜的環境并不能保證這一點。如在信號阻隔區GPS 接收機可能無法正常接收信號,系統無法長期實現INS慣性導航的功能,難以準確定位,使得無人機出現航線錯誤甚至炸機的風險[1-3]。
1)精細濾波算法
精細濾波算法是指針對不同傳感器,加速度計、陀螺儀、磁場計以及氣壓計單獨采用一套底層的濾波算法,從而在不增加傳感器成本的基礎上提高導航精度。
2)高效融合算法
目前使用最為廣泛的是卡爾曼濾波算法,為了提高算法的效率,需根據實際情況,對卡爾曼濾波器進行設計與改進,以達到降低卡爾曼濾波器維數并不損失精度的效果。
3)神經網絡技術
通過設置INS 誤差分析數據,可以有效解決GPS信號暫時沒有狀態下,無人機航線的判斷。當無人機可以再次采集GPS 信號時,依據神經網絡技術,能夠通過GPS 和INS 采集的數據,實現深度學習的目的,從而不斷優化神經網絡技術。如果無人機的GPS 信號再次消失的狀態下,便能夠依據這種技術分析慣導的位置,從而得到準確的INS 位置,使得無人機的GPS/INS 組合模式進一步改善。最終當無人機在特殊環境下進行作業時,當GPS 信號正常時,系統采用常規的組合導航方式進行導航;當在信號阻隔區GPS信號丟失時,系統采用神經網絡預測的方式,根據慣導信號來預測無人機自身的位置信息,從而指導無人機沿預定的路線飛行;當作業完畢要返回出發點時,導航模塊利用神經網絡對之前飛過路線的記憶功能,輸出無人機返回時自身的位置坐標信息,進而指導無人機安全返航。
4)分層調度思想
整個系統的設計分為三層,第一層為底層傳感器濾波層,用于提高傳感器精度且不相互污染;第二層為數據融合層,提高導航整體精度;第三層為算法調度層,實現智能化導航。在GPS 信號缺失時,算法調度層能夠迅速識別,并且調用加神經網絡修正的導航算法,在GPS信號恢復時又能重新使用GPS導航。
5)分級濾波思想
在有穩定GPS 的情況下,小型旋翼無人機的導航精度能夠滿足要求,因而在做多傳感器組合導航時不需要犧牲計算資源和魯棒性來略微提升導航精度。基于這種對導航模塊性能的要求,選用分級濾波構架。即底層采用分散式的濾波,頂層有選擇地采用融合算法。采用分級濾波,可以在部分傳感器失效的情況下,仍可以充分發揮有效傳感的功能,保證導航在一段時間內正常進行。在傳統的飛控導航模塊中,只要GPS 失效就會自動降落,并沒有充分利用其它傳感器的功能。
1 基本原理
傳統的小型旋翼無人機通常采用多傳感器組合導航的方式,典型的傳感器組合方式如圖1所示。基于GPS/INS 組合導航所用到的傳感器有GPS 和慣性導航元器件(陀螺儀、加速度計和磁力計),GPS 傳感器可以輸出載體在導航坐標系下的速度和經緯度信息,慣性導航傳感器可以輸出載體的加速度信息和角速度信息。由于在高度通道GPS 非常不穩定,所以輔以氣壓計來提高高度通道的導航精度。然而傳統的組合導航方式,屬于集中式濾波,當GPS 信號不能正常提供,而使得導航被迫中止[4-6]。
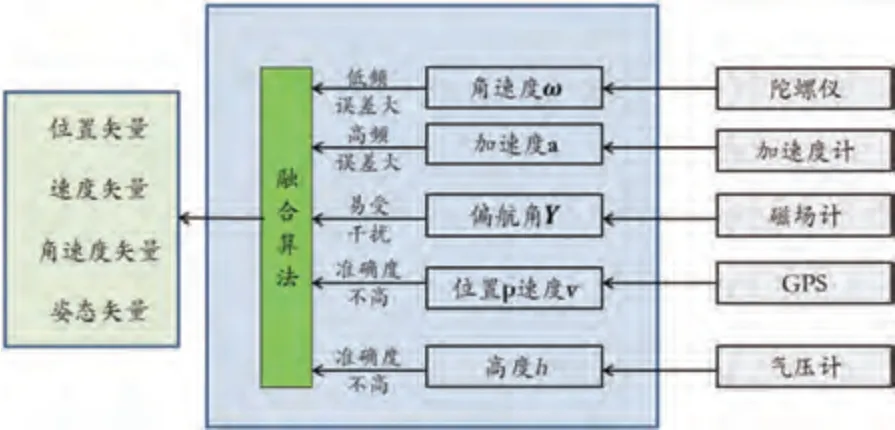
圖1 典型傳感器組合方式
通過多傳感器精細濾波算法以及高效融合算法提高導航系統精度,通過神經網絡等智能化工具以及復雜系統分層調度思想從而實現導航系統智能化,通過分級濾波構架,提高系統的魯棒性,如圖2 所示。系統初始化包括系統初始對準與傳感器的自修復。在傳感器的修復過程中,最為重要的是進行加速度計和陀螺儀的標定以及磁場計的修復。
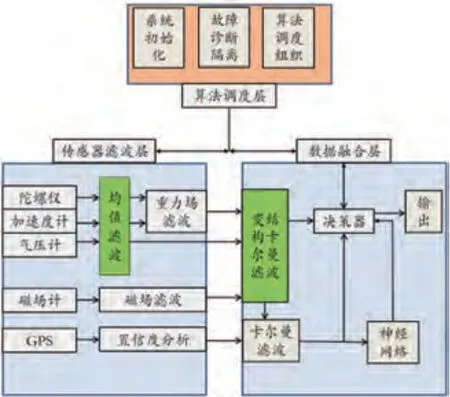
圖2 導航構架
通常依據重力場技術對加速度計實現靜態的判斷,一般選擇的判斷技術有三種,分別為6 位置判斷技術、12 位置判斷技術與24 位置判斷技術。文中選擇6 位置判斷技術,實現無人機加速度計三個軸的確定性誤差判斷,建立的模型如下:
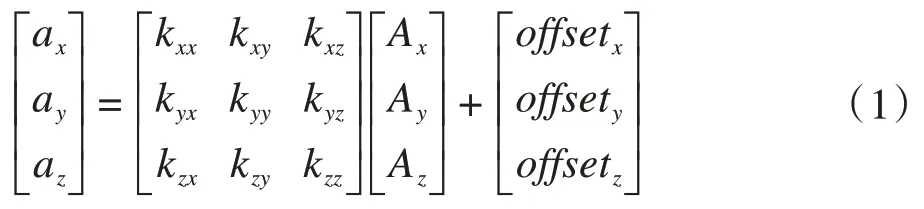
式中:ax、ay、az依次為無人機加速度計三個軸的實際輸出值;kii是無人機加速度計的標度值;Ax、Ay、Az依次為無人機三個軸加速度計不含確定性誤差后的值;kij是無人機加速度計的非正交誤差值;offseti是無人機加速度計的零位偏置。
電子羅盤的功能為采集地球磁場信息,分析北極的位置。一般地球的磁場信號很小,如果電子羅盤受到周圍信號的影響,無法獲得相關信息。通過對電子羅盤采集的信息修復,從而優化采集信息,一般采用平面修復技術,如圖3所示。
圖3 平面修復法
GPS 傳感器輸出的速度位置信息與慣性導航傳感器解算出來的速度位置信息作為卡爾曼濾波器的輸入,輸出慣性導航的誤差信息,用此誤差信息修正慣性導航的數據,最終產生無人機飛行需要的導航信息,如圖4 所示。當GPS 信號中斷時,組合導航無法工作。此時設計了神經網絡對GPS 位置和速度信號進行預測。其工作原理為:如圖4(a)所示,在GPS 信號正常時,設計ANN 神經網絡以慣性導航傳感器輸出的速度和姿態信息為輸入,以Kalman 濾波器的輸出為期望輸出對ANN 神經網絡進行訓練;如圖4(b)所示,當GPS 信號中斷時,利用訓練好的神經網絡來間接代替GPS 的作用,對kalman 濾波器的輸出進行預測,預測產生慣性導航的修正信號并補償慣導信號,在沒有GPS 信號的情況下,系統依舊可以輸出無人機自身的位置信息。
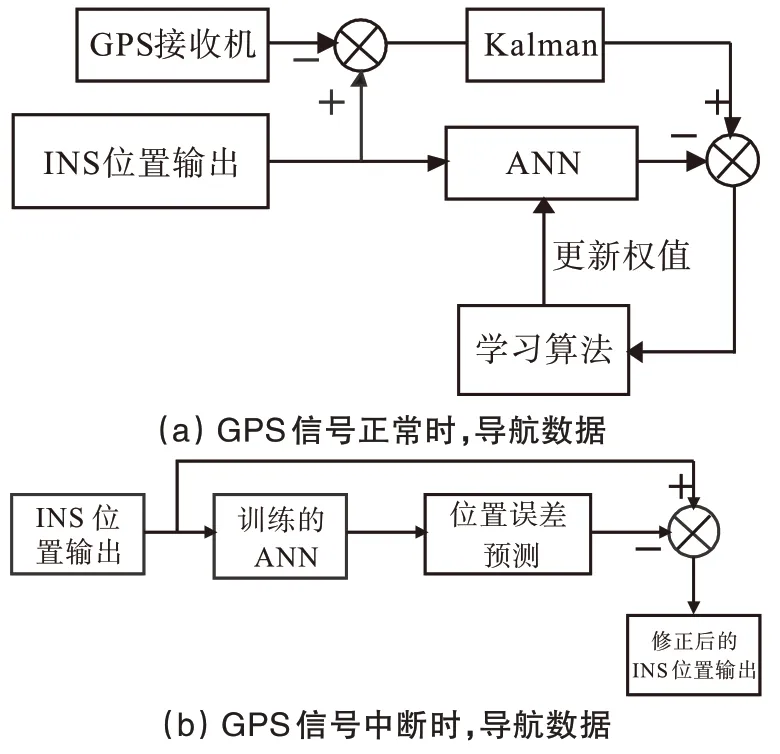
圖4 神經網絡架構圖
由歐拉角微分方程可知歐拉角的變化率與偏航角無關,也就是說即便偏航角不準確,也不會影響俯仰角和滾轉角的計算。因此可以在不融合磁力計數據的情況下,就可以使用重力場濾波,而且能夠保證濾波系統是穩定的。如公式(2)所示,其中,P&、R&和Y&為角速度在導航坐標系下的投影,ωnbx、ωnby和ωnbz為角速度在載體坐標系下的投影,也就是陀螺儀數據。
因此,設計重力場濾波框架(如圖5),保證系統的俯仰角和滾轉角收斂。在此,也特別說明在直接使用四元數方法計算姿態微分方程時,仍可以在不考慮磁力計的情況下做重力場濾波。依據是如下定理:使用四元數描述姿態時,偏航角誤差不會傳遞到俯仰角和滾轉角中。
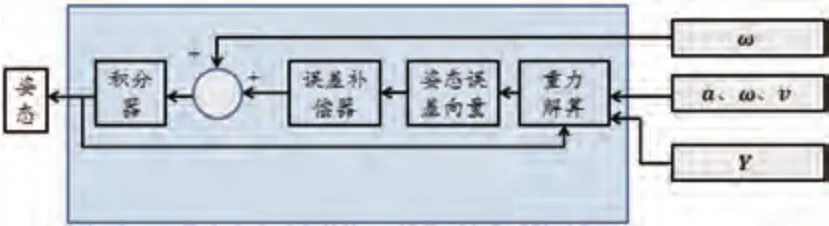
圖5 重力場濾波
2 硬件方案設計
硬件部分包括對旋翼機導航系統硬件模塊的選型和調試。GPS/INS 導航系統的硬件模塊選用InvenSense公司的MPU9250九軸運動跟蹤傳感器(陀螺儀+加速度計+磁力計)作為慣性導航數據源,選用Ublox 公司的外置GPS 模塊作為衛星導航的數據源。陀螺儀用于實時解算飛機飛行過程中的姿態和加速度;GPS用于檢測飛機的速度、位置坐標等信息。中央處理模塊選用ST公司的STM32F103處理單元,對這些傳感器的接口特性進行研究,并且完成了與中央處理器硬件接口的設計和連接。完成硬件系統的連接,確保硬件系統能正常運行[7-9]。慣導傳感器部分采用MPU9250復合芯片(MCM),基于CMOS-MEMS設計技術,通過3×3×1 mm的芯片,使得傳感器具有更高的性能的前提下,成本最小,同時,該芯片在受到較大震動沖擊的情況下,保持性能穩定,其原理圖如圖6所示。
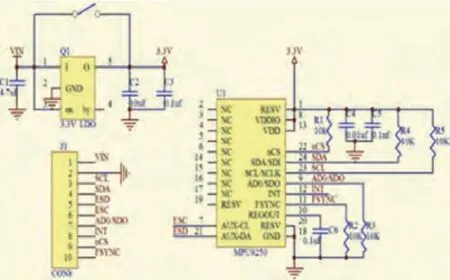
圖6 MPU9250原理圖
文中設計的無人機衛星導航傳感器選擇Ublox GPS,這種模式可以獲得多種導航數據,包括GPS、GLONASS或BeiDou,從而保證了無人機導航定位的準確性。但單獨使用北斗導航系統時,其本身只能二維定位,定位精度不高,適用于區域導航,故一般使用組合導航獲得更好的導航效果。此平臺專門適用于即使在GPS信號差的環境下都需要最高的可用性和準確性的高性能應用。其原理圖如圖7所示。

圖7 Ublox M8N電路圖
當無人機的GPS 信號無法采集時,通過選擇高精度的氣壓計,獲得無人機的飛行高度數據。文中通過設置獨立的數據處理模塊,優化了系統算法,明顯改善了氣壓計的工作性能。選用氣壓計DPS310+集成解算單片機STM32F0,如圖8所示。
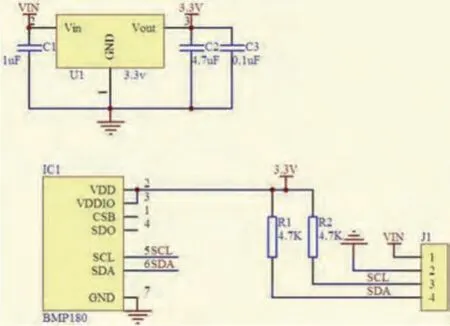
圖8 氣壓計模塊實物及原理圖
文中設計的數據處理模塊,還可以分析慣性導航和衛星導航傳感器采集的數據,利用kalman等融合算法對信號進行融合,輸出滿足飛行要求的導航定位信息。本系統所選用的是STM32F767與STM32F103芯片聯合處理。其中STM32F767為主控高性能芯片,負責整個系統的全局控制。STM32F103為從機,主要用于處理穩定性不高,且不能自由控制收發的傳感器。
為了能夠實時監測導航模塊的導航精度,在設計模塊時還引入了數據傳輸模塊。模塊的通訊示意圖如圖9所示。
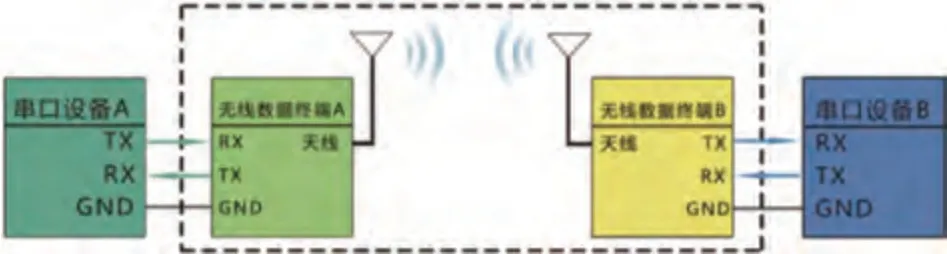
圖9 數傳通訊示意圖
3 算法設計
1)四元數法
四元數法在姿態解算過程中運用十分廣泛,不僅計算量小,而且算法的穩定性高。四元數基本方程:

式中:u表示單位化后的旋轉軸矢量;θ表示繞該軸旋轉的角度。這里都是四元數用來表示旋轉,因而所定義的四元數模為1。寫成四元數的形式:

式中:cosα,cosβ,cosγ為u的方向余弦;四元數的共軛:由于旋轉操作對應的四元數模為1,所以文中四元數的逆等于其共軛,即用四元數表示導航坐標系到載體坐標系的旋轉變換,首先將坐標表示法擴充為四元數的形式如下:

則從導航坐標系到載體坐標系的旋轉可以表示成如下的關系:

寫成矩陣形式為:
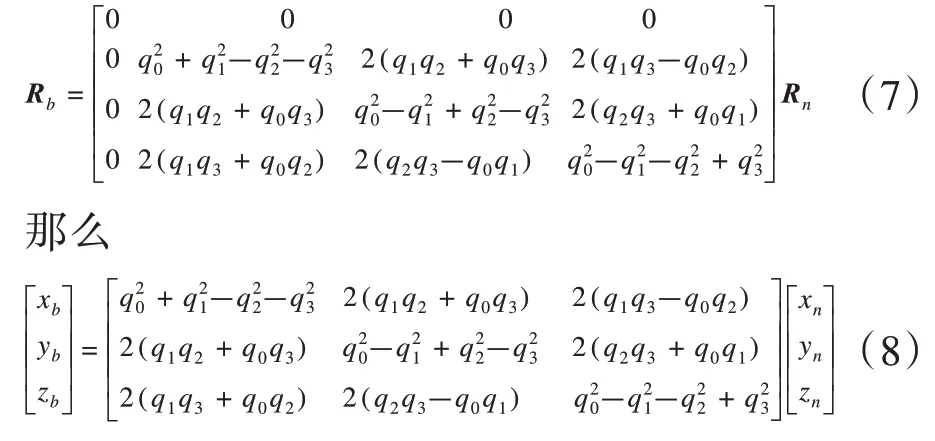
因而四元數法利用四個參數q0,q1,q2,q3實現了從導航坐標系到載體坐標系的變換[10-12]。
2)卡爾曼濾波
文中采用Kalman濾波計算流程如圖10所示,一共含有兩個模塊,分別是濾波分析單元與增益分析單元。
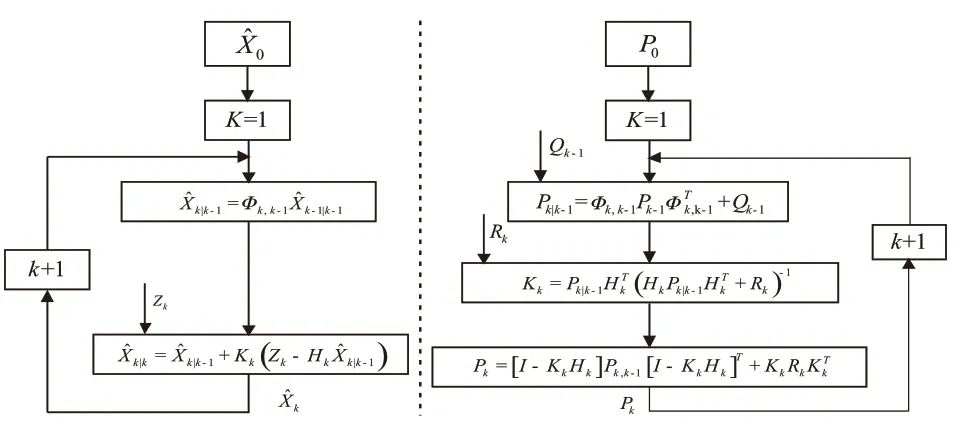
圖10 Kalman濾波計算流程
為了便于在計算機上實現,離散化后的狀態方程和觀測方程可以表示為[13-15]:

3)Elman神經網絡
通過測試發現Elman神經網絡不僅算法簡單,而且具備記憶功能,所以本系統的設計選用Elman神經網絡,其結構圖如圖11所示。
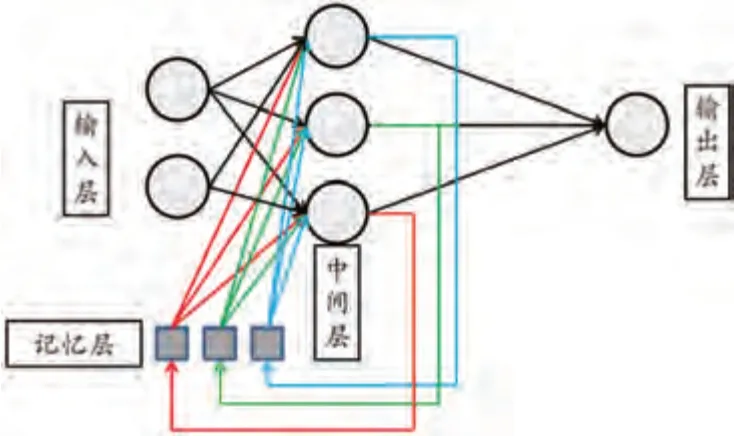
圖11 Elman濾波計算流程
Elman 神經網絡技術類似BP 神經網絡技術,含有兩個運行模式,依次是工作信號的正向運行模式與誤差反向運行模式。依照Elman神經網絡技術,通過采集的全部數據信息分析,如果這些信息符合系統要求,那么可以準確實現無人機導航定位,同時,還能夠實現神經網絡技術的分析。圖12 所示為Elman 神經網絡訓練和預測的流程圖。
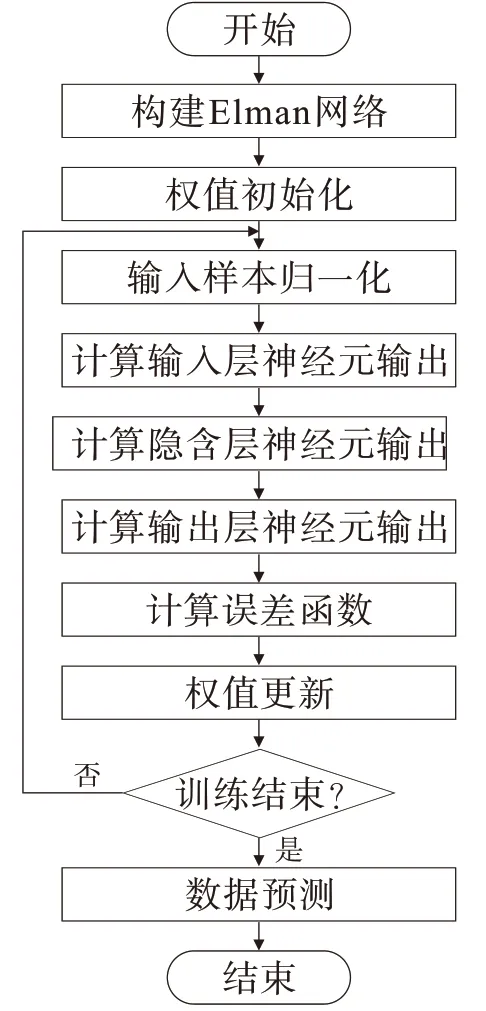
圖12 Elman神經網絡訓練和預測流程圖
依照無人機自主導航定位的要求,設置Elman神經網絡技術模型,含有各個神經元的信息,實現神經元傳遞函數的目標。然后設置每層的連接權值,通常設置的連接權值很小。由于系統采集的樣本信息存在一定的差異,導致系統輸入輸出值難以處理,因此,系統對于采集信息實現歸一化分析。接著,系統依據這些信息,優化算法,不斷改善系統各層的權值。因此,系統可以解決無人機導航定位中存在的問題,進行準確預測。
4 系統設計
小型旋翼無人機巡檢數據監測平臺程序基于LabVIEW 編寫,包括用戶登錄模塊、數據收發模塊、狀態信息顯示模塊、信號處理和分析模塊、數據存儲和歷史查詢模塊,監測平臺具有較快的數據收發響應時間、較強的數據處理能力、良好的用戶操作界面以及較完善的數據庫存儲查詢機制。
為了保護小型旋翼無人機巡檢的信息安全,方便巡檢人員的日常管理工作,為各種監控軟件設計可靠的用戶登錄和管理程序是必不可少的。本設計的LabVIEW 上位機監測系統登錄界面如圖13 所示,當輸入的用戶信息與用戶信息庫中的對應項匹配時就可以進入小型旋翼無人機巡檢數據監測系統主界面。

圖13 小型旋翼無人機監測平臺用戶登錄界面
5 結語
當無人機處于信號阻隔區時,GPS接收機可能無法正常接收信號,系統無法長期實現INS慣性導航的功能,難以準確定位。文中設計的無人機衛星導航傳感器選擇Ublox GPS,可以獲得多種導航數據,包括GPS、GLONASS 或 BeiDou,從而保證了無人機導航定位的準確性;設計的數據處理模塊,可以分析慣性導航和衛星導航傳感器采集的數據,利用kalman 等融合算法對信號進行融合,輸出滿足飛行要求的導航定位信息。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46