基于AHP-FEA權重分配方法的碼垛機器人腰部轉臺多目標結構優化
2022-09-15 02:40:22賀瑩王丹高涵馬超陳曄
食品與機械 2022年8期
賀 瑩 王 丹 高 涵 馬 超 陳 曄
(天津仁愛學院機械工程系,天津 301636)
高速重載碼垛機器人已被廣泛應用于現代化食品生產物流作業中。腰部轉臺是碼垛機器人用于帶動腰部支架以及其上機械臂實現腰部回轉運動的基礎零件,往復運動頻繁,受載大且復雜。因此在腰部轉臺的設計過程中,其強度、剛度和振動穩定性是需要保證的重要指標,同時應使其質量盡可能小,以提高機器人系統的動態特性,降低能耗。
目前,有關機器人結構優化方面的研究較多,但大多針對機械臂[1-4],而針對腰部轉臺這類基礎零件的研究卻相對較少。鑒于高速重載碼垛機器人的作業特點,針對其基礎性零件的結構優化設計需要在動力學層面開展研究,通過振動激勵測試試驗測得工作過程中的激勵力頻率,并與基礎性零件的固有頻率比較,判定動力學性能優化指標。同時,結合靜力學分析開展多目標結構優化設計研究[5-6]。
此外,通過多目標優化求解可以得到滿足優化目標的Pareto解集,該解集是一個包含多組優化設計方案的集合,需要通過構建各項優化指標的權重系數,從Pareto解集中選擇出最滿意的優化方案。權重系數通常由設計者根據經驗定性地確定,比如平均分配法[7-8]或經驗賦權法[9-10]等,具有較強的主觀性。研究擬引入層次分析法(Analytic Hierarch Process,AHP)[11-12],獲得各項性能指標的權重,并提出一種基于有限元分析的層次分析法(AHP-FEA),即依據有限元分析結果考察各個優化目標的重要性,以提高比較矩陣的客觀性,旨在形成一種更加科學,優化效果更優的權重系數分配方法。
1 研究方案
MD1200-YJ碼垛機器人的三維模型如圖1所示,該機器人的性能參數和機構參照文獻[5-6]。腰部轉臺的下部與腰關節RV減速器輸出端連接,其上部與腰部支架連接。伺服電機通過腰關節RV減速器驅動腰部轉臺轉動,進而帶動腰部支架以及其上安裝的機械臂實現腰關節的回轉運動。
研究方案:建立腰部轉臺的有限元模型,對腰部轉臺進行靜力學分析、模態分析以及振動激勵測試,確定優化目標、設計變量以及約束條件,利用試驗設計和響應面法建立優化目標函數的近似模型,利用AHP-FEA方法獲得各項性能指標的權重系數,建立綜合評價指標;利用NSGA-Ⅱ算法進行優化求解;通過與常用的平均分配法和經驗法兩種賦權方法獲得的優化結果進行對比,驗證AHP-FEA方法的優越性,并完成腰部轉臺的優化設計。
2 多目標結構優化設計
2.1 有限元模型建立
腰部轉臺模型如圖2所示,質量83.458 kg。

1. 腰部轉臺 2. 小臂驅動臂 3. 小臂驅動連桿 4. 水平保持連桿 5. 小臂 6. 大臂 7. 末端執行器 8. 腰部支架 9. 機座圖1 MD1200-YJ碼垛機器人模型Figure 1 MD1200-YJ palletizing robot model

圖2 三維模型Figure 2 3D model
(1) 材料屬性:QT500-7,彈性模量1.62×1011Pa;泊松比0.3;抗剪模量6.27×1010Pa;密度7×103kg/m3;屈服強度3.2×108Pa[13]。
(2) 網格劃分:四面體網格,最大單元45.697 mm;最小單元9.139 mm;節點總數44 542;單元總數26 160。有限元模型,如圖3所示。
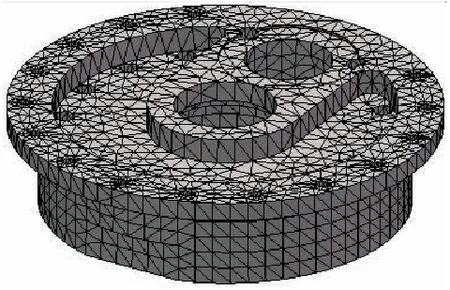
圖3 有限元模型Figure 3 Finite element model
2.2 腰部轉臺靜力學分析
2.2.1 施加位移約束 根據裝配關系,在腰部轉臺的底面施加固定約束。


圖4 運動部件受力分析Figure 4 Force analysis of moving parts
(1)
∑Fz′=0FN=G1+G2,
(2)
(3)
(4)


2.2.3 靜力學分析求解 經靜力學分析求解,腰部轉臺的等效最大應力為12.972 MPa,遠小于材料的許用應力;總變形量最大值約0.017 mm,如圖5和圖6所示,因此,腰部轉臺具備輕量化設計的潛力。

圖5 等效應力Figure 5 Equivalent stress

圖6 總變形量Figure 6 Total deformation
2.3 振動穩定性分析
振動穩定性的設計準則是使腰部轉臺的固有頻率和外載荷激勵頻率互相遠離,需要進行動態分析,包括模態分析和振動激勵測試。模態分析可以獲得零件的固有頻率和振型,振動激勵測試可以獲得機器人運動過程中,零件受到的外載荷激勵頻率。
2.3.1 模態分析 對于一個n自由度無阻尼系統的自由振動方程一般形式為

(5)
式中:

在系統自由振動中,假設所有的質量均做簡諧運動,則方程解的形式為
Xi=A(i)sin(ωnit+φi),i=1,2,3,…,n,
(6)
式中:
Xi、A(i)、ωni、φi——第i個振型的n個位移列陣、幅值向量、固有頻率(單位:rad/s)和相位角(單位:rad)。
將式(6)代入方程式(5),得:
(7)
令
(8)
式(8)稱為特征矩陣。
由式(7)可知,要使A有不全為零的解,則必須有
(9)
由式(9)可以求得n個固有頻率。
將各個固有頻率代入式(7),可以求得相應的主振型矢量A(i)。
n自由度振動系統,具有n個固有頻率和與之對應的n階主振型。各主振型之間存在著關于質量矩陣和剛度矩陣的正交性。
對式(7)右乘轉置A(i)T可以得到
(10)
由于M是正定的,K是正定或半正定的,由式(10)可以得到
(11)
由此可知,在保證結構剛度不降低的情況下,減小質量,可以增大固有頻率,提高系統的動態性能。
對腰部轉臺進行模態分析,此處只給出前兩階模態振型,如圖7所示。一階固有頻率824.97 Hz,一階振型為繞x偏z45°和繞z偏-x45°方向對角兩兩往復扭動;二階固有頻率854.99 Hz,二階振型為繞x和z軸對角兩兩往復扭動。
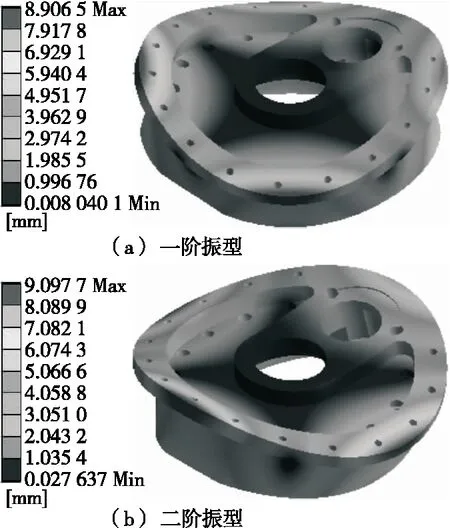
圖7 前兩階模態振型Figure 7 The first two modes
2.3.2 振動激勵測試 采集機器人工作過程中腰部轉臺受到的激勵信號,結合模態分析結果考察其振動穩定性。主要試驗設備見表1。
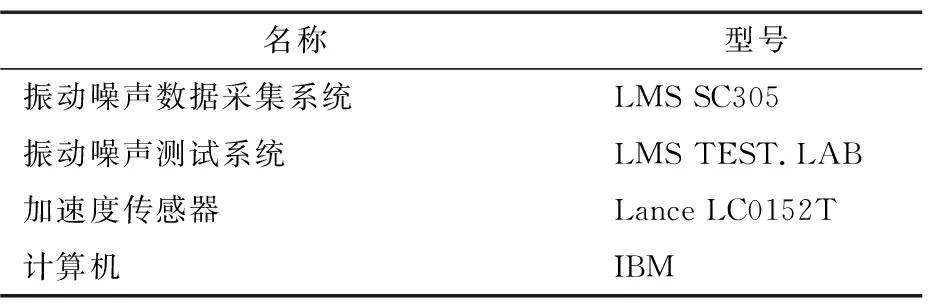
表1 試驗設備Table 1 Experimental equipment
連接螺釘是振動在零件之間傳遞的“橋梁”,所以將加速度傳感器布置于腰部轉臺與其上腰部支架連接螺釘處測量激勵信號。儀器設置:采樣時間30 s,帶寬1 024 Hz,分辨率0.125 Hz。測取測試點-x、+y、-z3個方向的加速度頻譜,此處只給出#1和#2兩個測試點的加速度頻譜,結果見圖8。
由圖8可知,#1和#2測試點3個方向的加速度頻譜變化趨勢相似,但峰值存在差異,這與兩點位處結構的連接剛度差異有關;測試點-x和-z方向的加速度峰值對應的頻率約為388 Hz,+y方向的振動加速度峰值對應的頻率為1 557 Hz,均與腰部轉臺的第一階固有頻率值(824.97 Hz)距離較遠,表明腰部轉臺出現共振的幾率較低,具有較好的振動穩定性。考慮到碼垛機器人的運動平穩性及定位精度要求較高,提高第一階固有頻率有利于保證結構的整體剛度,因此在優化過程中以第一階固有頻率最大作為優化目標之一。
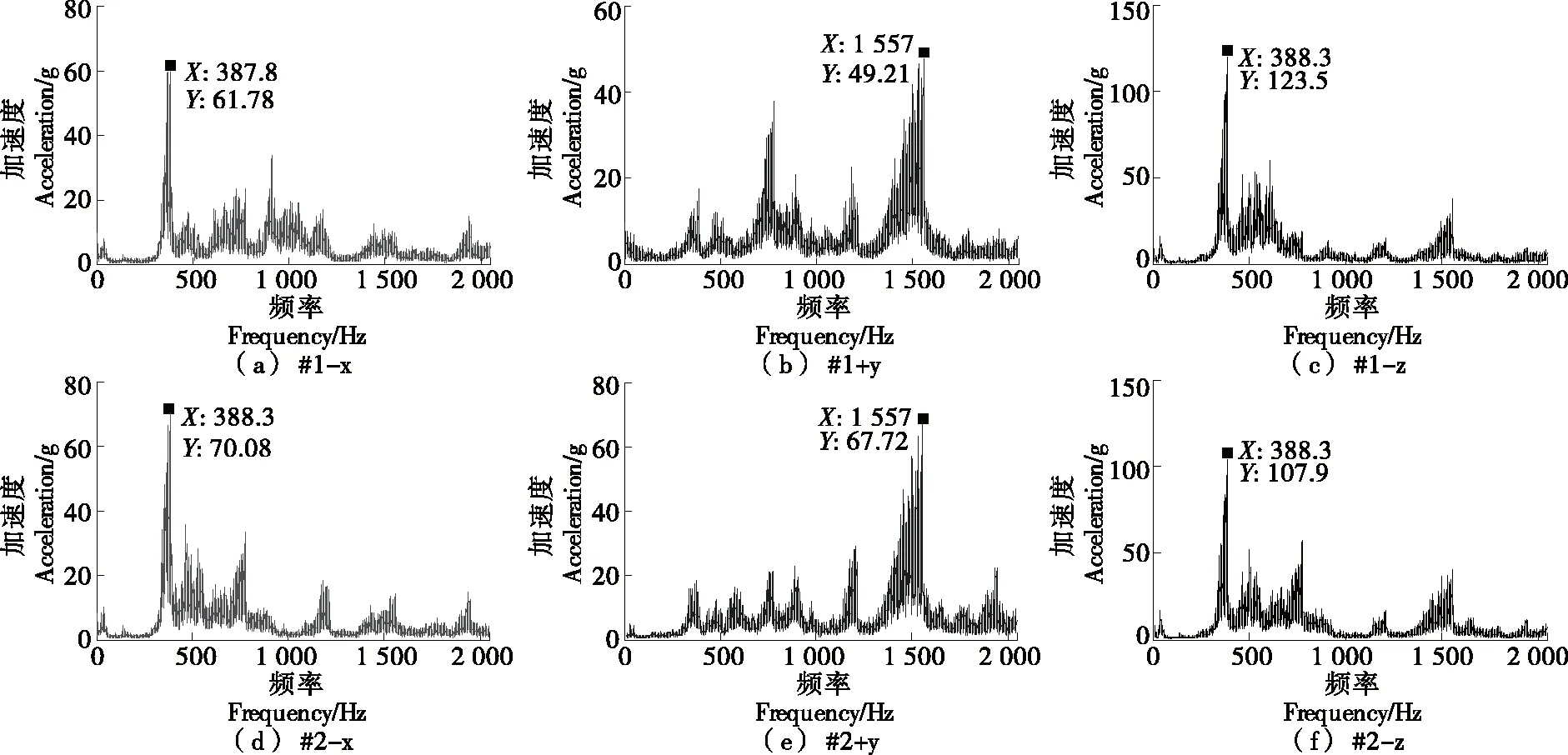
圖8 加速度頻譜圖Figure 8 Acceleration spectrum
2.4 優化建模
2.4.1 設計變量 選取腰部轉臺的4個相互獨立且非裝配尺寸的結構參數為設計變量X=(x1,x2,x3,x4),如圖9所示,對應的名稱、初始值以及取值范圍見表2。

圖9 設計變量指示圖Figure 9 Design variables indicator diagram
2.4.2 目標函數 由腰部轉臺的設計準則、靜力學分析以及動力學分析確定,以質量最小、最大位移最小、第一階固有頻率最大、最大應力最小為優化目標,其目標函數:
(12)
采用Box-Behnken試驗設計方法,結合表2設計變量數據,建立25組試驗設計方案,根據各組設計方案,更改模型結構參數,并逐一通過質量測算、靜力學分析和模態分析分別完成質量m、最大應力σmax、最大位移δmax、第一階固有頻率f1的計算,得到試驗設計矩陣及結果見表3。利用RSM方法獲得4個優化目標函數的近似模型:m(X),δmax(X),f1(X),σmax(X)。

表2 設計變量表Table 2 Design variables tablemm

表3 試驗設計矩陣Table 3 Experiment design matrix
2.4.3 約束條件 以各設計變量的邊界條件作為約束條件。
(1) 變量x1和x4為腰部轉臺的厚度尺寸,其尺寸越小,質量越輕,因此以各尺寸的初值為最大值,以剩余材料厚度不小于球墨鑄鐵最小壁厚[13]為原則選取最小值。
(2) 變量x2和x3為腰部轉臺的深度尺寸,其尺寸越大,質量越輕,因此以各尺寸的初始值為最小值,以剩余材料厚度不小于球墨鑄鐵最小壁厚為原則選取最大值。
2.4.4 權重系數的確定 提出一種基于有限元分析結果的層次分析法確定權重系數。層次分析法的原理參照文獻[11-12]。
(1) 建立遞階層次結構模型。將優化問題分成目標層、準則層和方案層3個層次,如圖10所示。

圖10 遞階層次結構模型Figure 10 Hierarchical substructure model
(2) 構造比較矩陣。質量、位移、第一階固有頻率、應力分別用B1、B2、B3、B4表示。依據有限元分析結果,考察各性能指標的重要性。從有限元靜力和動力學分析結果來看,最大應力、最大位移均遠小于許用值,第一階固有頻率與激勵頻率相距較遠,說明腰部轉臺輕量化的潛力較大,因此將減輕質量作為主要目標,其重要性排第一。對于第一階固有頻率、位移和應力的重要性評價:最大位移較小,但是機器人的臂桿尺度長,對腰部轉臺的變形量具有放大作用,容易增大機器人末端的位置誤差,故最大變形量應越小越好,因此其重要性排第二;第一階固有頻率比較高,振動穩定性比較好,但是提高第一階固有頻率,有利于提高結構的整體剛度,因此其重要性排第三;最大等效應力值遠小于QT500-7的許用應力,安全系數較大,其重要性排第四。因此,準則層各因素兩兩比較結果見表4,并得到比較矩陣式(13)。

表4 各因素的影響程度比較Table 4 Compare the influence degree of each factor

(13)
矩陣A的最大特征值λmax=4.019 2;相應的特征向量為ω*=(0.914 2,0.191 2,0.339 2,0.112 4)T。
(3) 一致性檢驗:一致性指標CI=0.006 4<0.1;隨機一致性指標RI=0.9;一致性比率CR=0.007<0.1。
據此,可以判定比較矩陣A通過一致性檢驗,將特征向量ω*歸一化處理得到Fm(X)、Fδ(X)、Ff1(X)和Fσ(X)4個優化目標的權重向量:
ωA=(0.587 2,0.217 9,0.122 8,0.072 2)T。
同時,選取兩種常見的權重系數分配方案:第一種為基于平均分配法確定權重系數,4個優化目標同等重要,即:
ωT=(0.25,0.25,0.25,0.25)T。
第二種為基于經驗法確定權重系數,4個優化目標重要性依次降低,即:
ωJ=(0.4,0.3,0.2,0.1)T。
2.4.5 綜合目標函數的建立 根據4個分目標函數以及3種不同的權重系數向量,構建綜合目標函數:
(14)
由于優化設計的目標是使綜合目標函數值最小化,而其中第一階固有頻率的目標是使其最大化,因此其前面加負號。式(14)可作為3種賦權方法優劣的評價指標,綜合目標函數值越小,說明所獲得的優化設計方案的綜合效果越優。
2.5 多目標優化求解
采用性能優越的NSGA-Ⅱ算法[14]分別對3種權重系數分配方案下構建的綜合目標進行優化求解。參數配置:種群規模為40;代數為200;交叉率為0.9;交叉分布指數為10;變異分布指數為20。
2.6 結果與分析
通過計算求解得到優化后結構參數及相應的結構性能參數,如表5所示。由表5可知,3種權重系數下,腰部轉臺的質量均有不同程度的減小,其中采用AHP-FEA權重系數優化的質量最小,最大位移和最大應力值均有不同程度的增大,但均在許用范圍內,第一階固有頻率變化不大。將3種方法獲得的優化后的最小(大)化的結構性能參數值[Fm(X)、Fδ(X)、Ff1(X)、Fσ(X)]代入式(14),分別計算綜合目標函數值。結果表明,采用AHP-FEA權重系數下的優化綜合目標函數值最小,說明該方法綜合優化效果更優。

表5 不同權重系數下的優化結果Table 5 Optimization results under different weight coefficients
考慮結構工藝性,對AHP-FEA權重系數下的優化結果進行圓整,根據最終結構參數重構三維模型,得到優化后的目標性能參數,結果見表6和圖11~圖13,經多目標結構優化,外圓柱面直徑(x1)無變化;內上頂面高度(x2)和頂部凹坑深度(x3)均有增大,相對應的結構厚度分別減小了6.25,4.00 mm;法蘭邊緣厚度(x4)減小了10 mm。腰部轉臺質量減小了9.6%,最大總位移增大了約0.009 mm,最大等效應力值增大了5.759 MPa,但仍在允許范圍內,其結構強度和剛度仍充分滿足要求;第一階固有頻率增加了1.31 Hz,使之更加遠離腰部轉臺受到的外載荷激勵頻率,提高了振動穩定性,也充分驗證了“在保證結構剛度不降低的情況下,減小質量,可以增大固有頻率”的論斷。通過優化研究,腰部轉臺的整體結構性能得到提升,提高了碼垛機器人的動態性能,達到結構優化的設計目的,驗證了優化方法的有效性。

表6 優化結果及性能參數Table 6 Optimization results and performance parameters

圖11 優化后模型的等效應力Figure11 Equivalent srtess of optimized model

圖12 優化后模型的總位移Figure 12 Total deformation of optimized model

圖13 優化后模型的一階振型Figure 13 The first modal shape of optimized model
3 結論
針對MD-1200YJ碼垛機器人腰部轉臺的多目標結構優化問題進行了研究,提出了一種基于有限元分析的改進層次分析方法(AHP-FEA)來確定各分優化目標權重系數,并與常用的平均分配法和經驗賦權法進行對比,證明了AHP-FEA方法的優越性。通過優化設計,腰部轉臺結構性能得到進一步提升。從優化后的最大應力和位移值可以看出,腰部轉臺仍具有較大的輕量化設計的潛力,后續可以考慮基于形狀優化、拓撲優化等方法,進一步探討其結構優化問題。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:44
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
