基于狼群角色匹配-勞動分工機制的無人機集群空戰策略
2022-09-16 12:18:20張慶昌梁曉龍楊愛武
空軍工程大學學報 2022年4期
關鍵詞:模型
張慶昌,梁曉龍*,楊愛武,吳 傲,王 寧
(1.空軍工程大學航空集群技術與作戰應用實驗室,西安,710051;2.陜西省電子信息系統綜合集成重點實驗室,西安,710051)
未來空戰朝著無人化、網絡化和多維化的方向發展,作戰場景更加復雜,作戰內涵更加豐富,作戰方式更加多樣[1]。單個無人機在執行任務時有魯棒性差、效率不高和容錯性不足等缺點。相比之下,無人機集群通過自組織協同機制,產生作戰能力涌現,具有更高的魯棒性和容錯性。在集群空戰任務中,合理的任務分工和目標分配機制能夠使集群協調有序地完成任務,對作戰效能的發揮具有重要作用。生物集群具有高度智能的任務分工和目標分配機制,能夠為無人機集群空戰策略提供借鑒和支撐。
狼群是依靠團隊合作捕食獵物的高級群體,具有嚴格的等級結構,是一種機會主義捕食群體[2-3]。文獻[2]通過分析狼群跟蹤和包圍行為,研究了狼群的認知和協作特性,并將其應用到無人機集群對抗決策中,對提升無人機集群系統對抗機制具有重要意義。針對無人機集群在感知范圍受限的協同控制問題,文獻[3]通過分析圍捕獵物時狼群的空間布局和交互行為特征,提出了分層結構的狼群交互動力學模型,映射到無人機集群,得到無人機集群異構合圍控制策略,提高了集群合圍控制的可靠性。針對無人機集群協同多目標攻防決策問題,文獻[4]通過狼群算法建立了攻防決策模型,得到基于狼群算法的多目標攻防滿意決策方法,通過仿真驗證了其在空戰中具有可行性。文獻[5]提取狼群的游走、召喚和圍攻行為,并結合狼群算法,對起始點和終點都已知的航跡進行規劃。結果顯示運用基于狼群的無人機航跡規劃方法能夠有效躲避威脅,航跡路程短,所用時間少。
受自然界狼群生物學行為啟發,本文建立了狼群的角色匹配-勞動分工模型,并結合空戰中無人機集群分工機制,得到無人機集群角色匹配-任務分工模型。考慮到任務與目標的耦合關系,分別針對攻擊和制導任務提出了目標分配模型,采用灰色關聯分析法、專家評價法和匈牙利方法[6-9]求解目標分配方案。最后,通過仿真驗證了所提出的角色匹配-任務分工和目標分配方法在無人機集群空戰決策中的有效性和可行性。
1 狼群角色匹配-勞動分工機制
1.1 狼群協同圍捕行為特性
狼群是有極強環境適應性和嚴格社會等級結構的強群。狼群圍捕任務分工[10]如下:頭狼是狼群首領,關系到狼群的生存和繁衍,負責組織和指揮獵捕行動,為其他狼分配任務[11]。探狼僅次于頭狼,是狼群精英,負責在某區域搜尋獵物,并將信息報告給頭狼。猛狼具有較強攻擊力,負責攻擊獵物。巨狼充當隨機因素,預先布設在逃跑路線上,負責襲擾獵物。基于不同角色匹配不同勞動的分工機制,不論是在強群攻擊強群,如圍捕力量強悍的牦牛群,還是強群攻擊弱群,如獵捕機動性強的羚羊群時,均有較高的成功率。
通過對狼群圍捕過程分析,可以總結出狼群個體具有專業性、均衡性和靈活性3種特性。
從個體的專業性來看,狼群個體自身特點不同,適合不同角色,承擔不同任務。這有利于發揮每匹狼的優勢,協作配合。也有利于強化某匹狼的學習能力。專業性使各個體趨于一種角色,有利于系統的穩定性,增強了整個團隊的生存能力。
從個體承擔任務的均衡性來看,在頭狼分配任務時,會將任務分為若干個子任務,執行任務時每個狼都會承擔適合自身的部分任務,且任務數量和難度相對均衡。任務的均衡性保證不會因為某一匹狼的受傷導致獵捕失敗,同時也避免某匹狼的過度承擔而造成損害。
從狼群個體的靈活性來看,隨著圍捕態勢變化和外界任務需求改變,狼群個體會通過轉變角色來滿足需求變化。
1.2 狼群角色匹配-勞動分工原理
狼群在執行任務時多個任務既不交叉也不重合,彼此獨立共同形成子任務集合。如圖1所示,狼群個體進行角色匹配與任務分工的概念一致,由態勢變化對角色進行調整是與任務需求變化一致,可以通過個體角色調整方案來反映狼群任務分工方案。在狼群個體獲得任務后還需對相應任務的具體目標進行分配,進而狼群個體獲得具體任務目標。

圖1 狼群角色匹配與任務分工的映射關系
具體過程以個體i進行說明,個體i初期角色為猛狼,個體變量xi在區間(xc~xd)內。在圍捕時,每個任務都會對個體i產生聚集作用ψg和分離作用ψs,兩者之比形成相對聚集作用ψk*。此時襲擾任務的聚集作用ψg較大,分離作用ψs較小,其比值ψk*是所有任務中最大的,達到觸發條件后襲擾任務會形成調節量Δxi,改變個體變量xi至區間(xd~xe)范圍內,匹配巨狼角色,承擔襲擾任務。轉變為巨狼角色的數量根據羚羊群數量和隊形而調整。
1.3 狼群角色匹配-勞動分工模型
假設狼群個體數量為N,任務數量為M。按任務流程排列任務,任務集合為A=[A1,A2,…,AM]。定義整個區間為(x0-1,xM-M+1),并等分成M個區間,每個區間長度d:
(1)

(2)

(3)

(4)

(5)
(6)

(7)

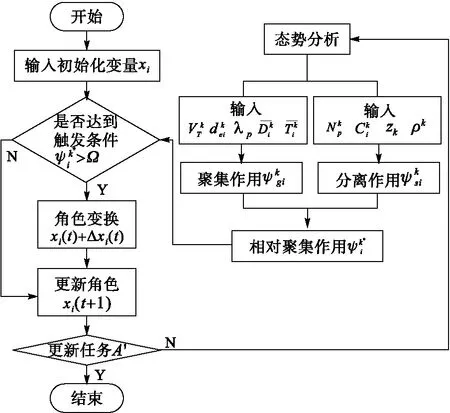
圖2 基本模型流程圖
2 狼群啟發的無人機集群角色匹配-任務分工機制
2.1 狼群機制到無人機集群機制映射
在空戰攻防演變中,根據各無人機任務流程,對應任務有指揮兼攻防、跟蹤敵機、攻擊敵機和導彈制導,然后根據自身性能將無人機集群角色分為指揮機、攻擊無人機、制導無人機和跟蹤無人機。將無人機設定為固定角色承擔單一任務不利于戰場態勢的調整和無人機資源的有效利用。個體與個體特性相似,均具有專一性和靈活性;通過分析,狼群與無人機集群的行為相似,均是圍捕攻擊行為。通過狼群與無人機集群行為以及個體間相同特點建立映射關系,具體映射如圖3所示。
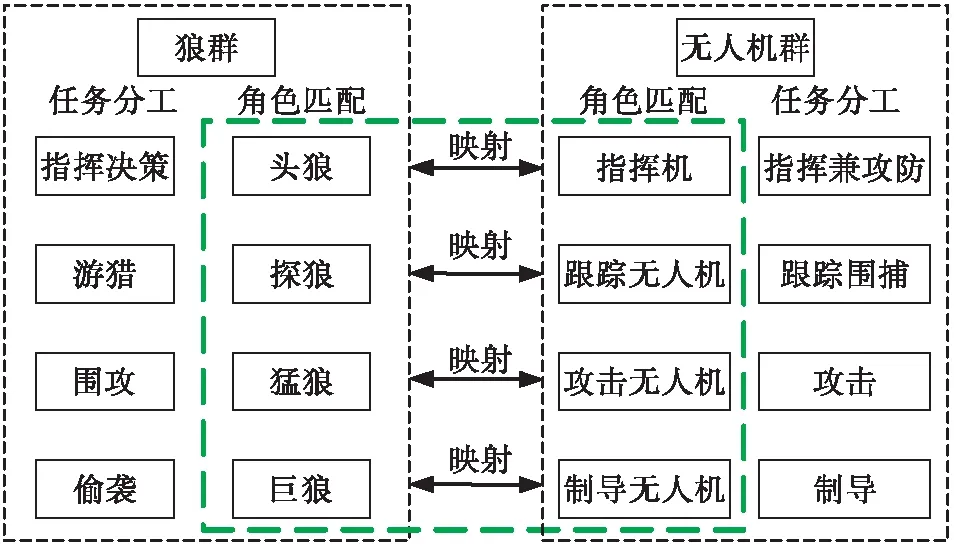
圖3 狼群到無人機集群角色映射
2.2 無人機集群角色匹配-任務分工模型
在空戰場演變過程中,如圖4所示,首先獲取環境信息和敵方信息,如戰場位置,戰場區域大小、敵方集群規模、飛機類型和飛機性能等。然后根據態勢信息決策層會制定我方集群調整方案,更新任務層任務。無人機則根據需求變化和自身狀況進行調整,在滿足任務需求和調整到符合無人機自身狀況的前提下,更新基于角色層的角色分配方案。

圖4 無人機集群角色匹配-任務分工模型示意圖
根據無人機集群角色匹配-任務分工模型有4類角色,指揮機角色的任務區間為(0~1);跟蹤無人機任務區間為(1~2);攻擊無人機角色任務區間為(2~3);制導無人機角色為對應的任務區間為(3~4)。假設在執行任務初始時刻,不同角色對應的數量為1,2,2,2。隨著戰場態勢變化,敵我雙方逐漸拉近,敵方無人機進入我方攻擊區域,不同任務的需求量變為了1,1,4,1。之前匹配跟蹤任務(跟蹤無人機)和制導任務(制導無人機)的無人機轉換為攻擊無人機,承擔需求大的攻擊任務,從而對敵機進行攻擊,示意圖如圖5所示。
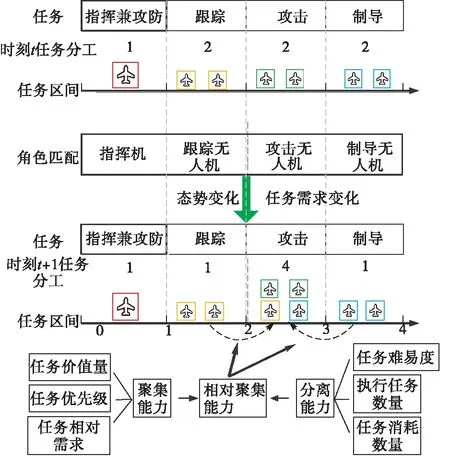
圖5 任務變化和角色轉變示意圖
3 無人機集群目標分配機制
通過借鑒狼群角色匹配-勞動分工機制,提出了無人機集群空戰角色匹配-任務分工模型,能夠根據戰場態勢變化實時調整集群個體的任務分工。在空戰中,針對具體目標進行有效打擊對空戰態勢朝著有利于我方局勢的方向發展具有重要意義。對于擔負攻擊和制導任務的無人機,需要根據敵我態勢進行合理的目標分配,本節分別給出攻擊和制導的目標分配策略。
3.1 攻擊無人機目標分配策略
攻擊無人機協同執行任務時,對攻擊目標實時分配是有效攻擊的前提。對空戰場敵我雙方對峙優勢進行評估,包括空戰態勢優勢和空戰能力優勢兩個方面[12]。
圖6為空戰態勢對比。從角度、高度差、相對距離和速度等方面來分析空戰態勢,構建效益值函數得到效益值。
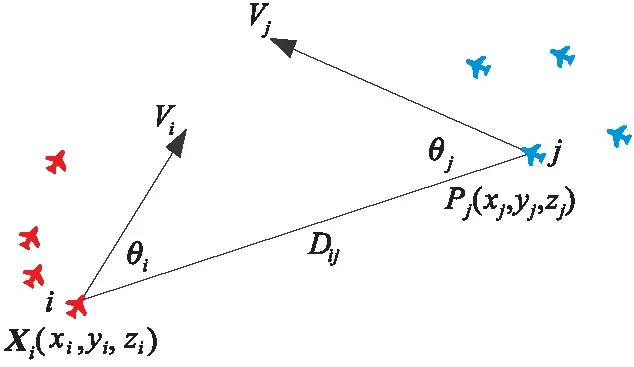
圖6 敵我態勢分析圖
1)相對角度優勢函數:
(8)
式中:θj為敵機j速度方向與兩機連線的夾角;θi為我機i速度方向與兩機連線的夾角。
2)高度優勢函數:
(9)
式中,zij=zi-zj,為我機與敵機的高度差。
3)距離優勢函數:
ydis=e-((Dij-d0)/τ)2
(10)

4)速度優勢函數:
(11)
式中:Vi為我機i的速度;Vj為敵機j的速度。
5)飛機類型效益值:
(12)

(13)


(14)
式中:C為作戰效能;ε1,ε2為操縱效能系數和生存能力系數;B為機動參數;A1為火力參數;A2為探測能力參數。
(15)
不同系數對效益函數的影響不同,通過采用客觀評價和主觀分析相結合的方式,即通過灰色關聯度分析和專家評價結合得到客觀實際的數據,結果如表1。

表1 攻擊無人機目標分配相關系數
3.2 制導無人機目標分配策略
主動式雷達尋的制導的過程為飛機鎖定目標,導彈發射后飛機照射目標進行制導,導彈進入末制導階段自主制導,制導結束。這增加了我機受敵機威脅的危險,應用載機發射他機協同制導方法降低威脅。
協同制導優勢包含相對威脅機j態勢優勢、相對制導導彈態勢優勢和制導機自身綜合性能三方面。首先是敵我態勢優勢,應考慮相對距離、相對速度和相對夾角三方面[13]。相對距離優勢函數:
y′dis=e-3d/Dmax
(16)

(17)
(18)
式中:θ為導彈與制導無人機連線的夾角;φ為制導無人機與導彈速度方向軸線的夾角。制導機自身綜合性能函數:
yself=y′tui
(19)

(20)

表2 制導無人機目標分配相關系數
4 仿真分析
開展空戰仿真驗證,作戰場地為300 km×300 km的區域,戰場中心為坐標原點,向右為x軸正半軸,向上為y軸正半軸。作戰想定:紅藍雙方均出動1架有人機和4架無人機,有人機與有人機、無人機與無人機的機動性能相同。共攜有12枚空空導彈,其中有人機4枚,無人機各2枚。首先紅藍雙方進行初始化,5 s后初始化結束,雙方在戰場空域內開始空戰,敵我雙方都可獲得所有飛機數據。獲勝規則為敵方有人機被擊落或到達規定時間(20 min)我方戰機損失少。設飛機初始高度9 000~10 000 m,速度0.9Ma。
仿真實驗為紅方飛機在數量、載荷、雷達性能和機動性能均相同的情況下采用不同策略與藍方進行對戰。方案1采取無人機集群角色匹配-任務分工方法,方案2采取基于規則的固定角色方法。
基于無人機集群角色匹配-任務分工機制的紅方對戰藍方時,角色匹配圖見圖7。
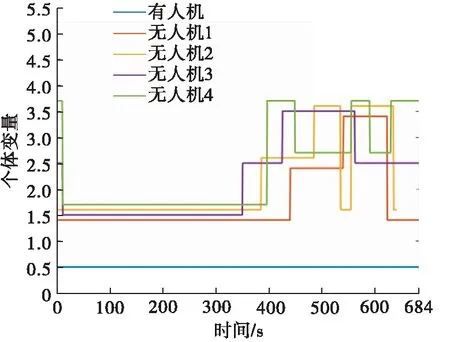
圖7 角色匹配變換圖
由角色匹配與任務分工的對應關系得到無人機集群任務分工,如圖8所示。
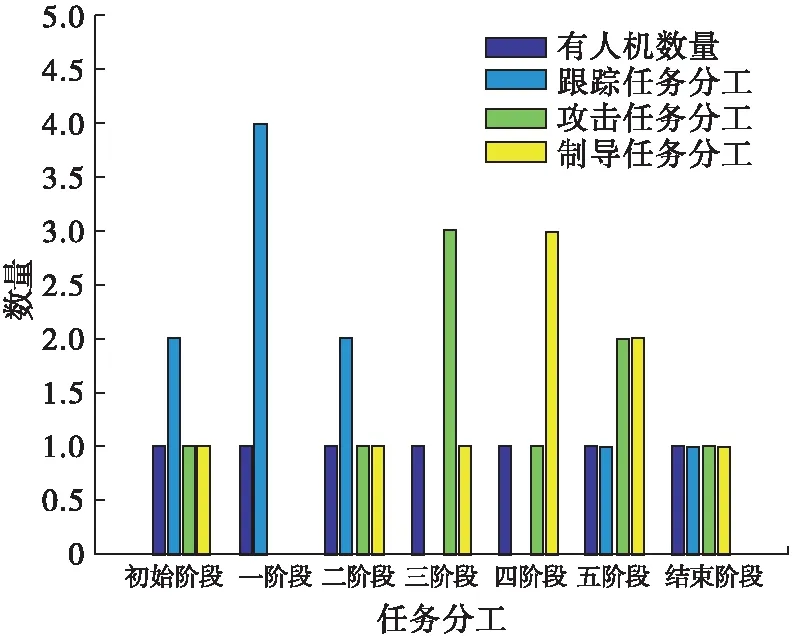
圖8 任務分工圖
因為任務階段的交叉以及角色與態勢轉變較快,取具有代表性的某一時刻的任務分工來說明此階段的任務分工狀況。初始階段,在2 s時各角色數量為1,2,1,1。如圖13和14所示,第一階段,在200 s時無人機全部轉變為跟蹤無人機,任務分工為1,4,0,0。第二階段,在365 s時前方飛機相遇,攻擊任務需求增加,任務分工為1,2,1,1。分工有人機,無人機1和無人機2跟蹤任務,無人機3攻擊任務,無人機4跟蹤任務。第三和第四階段,分別在460 s和550 s時,任務分工為1,0,3,1和1,0,1,3。分別是分工有人機,無人機1、無人機2和無人機4攻擊任務,無人機3制導任務和分工有人機,無人機4攻擊任務,無人機1、無人機2和無人機3制導任務。第五階段,在600 s時為交戰后期階段,任務分工為1,0,2,2,為分工有人機,無人機3和無人機4攻擊任務,無人機1和無人機2制導任務。結束階段為作戰結束后回到初始角色,因為無人機2被摧毀,任務分工為1,1,1,1。
當無人機的任務分工發生變化時,需要更新分配目標,應用目標分配模型得到空戰過程中目標分配方案,如圖9所示。
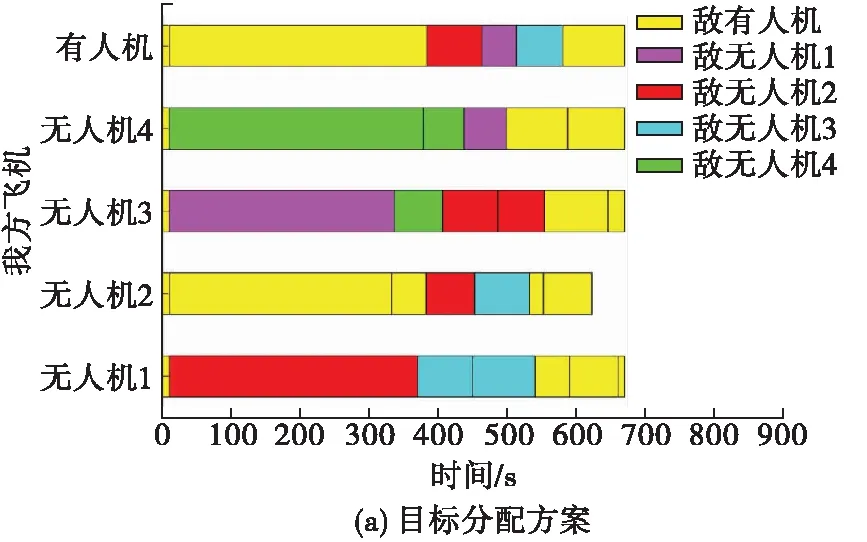

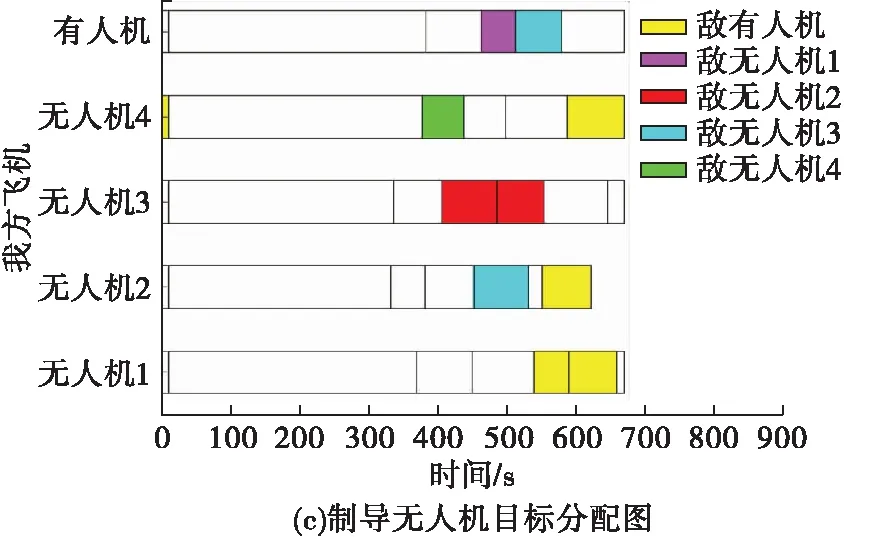
圖9 目標分配圖
在初始階段,任務分配根據前期經驗得來,目標為高價值的有人機。在空戰開始后,以第一階段為例,任務分工為1,4,0,0,通過目標分配矩陣和匈牙利算法求解得到目標分配方案。即無人機1跟蹤敵無人機2,無人機2跟蹤敵有人機,無人機3跟蹤敵無人機1,無人機4跟蹤敵無人機4,攻擊無人機和制導無人機具體目標分配如圖9(b)和(c)所示。
對照組為基于規則的固定角色方案,是按照跟蹤、攻擊和制導規則依次進行,通過距離和流程取最近的1架飛機承擔相應任務,固定角色在對戰過程中未進行角色轉變。圖15為固定角色匹配圖,每個角色都是固定不變的,通過規則實現對敵打擊。
因為系統中存在隨機變量,如導彈命中率,飛機隨機運動,彈藥消耗等。故每一局的戰果有一定的隨機性。為驗證無人機集群角色匹配-任務分工模型的普適性,兩種方案均進行了300次蒙特卡洛實驗,統計數據如圖10所示,為平均值數據統計圖。
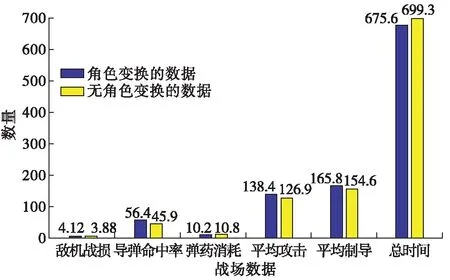
圖10 作戰數據對比圖
角色匹配-任務分工是基于戰場需求匹配的,無人機快速轉變角色更有利于提高作戰效率。應用角色匹配策略的平均敵機戰損量為4.12架,而無角色匹配的平均敵機戰損量為3.88架,作戰效率提高了6.19%。在基于角色的聚集作用和分離作用下,剩余導彈量作為相關因素得到應用,統計數據中平均導彈命中率為56.4%,而無角色匹配則為45.9%,說明添加該因素使導彈能夠得到充分利用。導彈消耗量為10.2和10.8,基于角色匹配-任務分工模型的無人機集群角色使用導彈利用效率更高,提高了5.56%。任務具有一定的連續性,而且前后任務之間具有關聯性,單架機攻擊任務所用平均時間分別為138.4 s和126.9 s,導彈發出后單架機制導任務所用平均時間分別為165.8 s和154.6 s,基于角色匹配-任務分工模型的無人機能夠快速轉變,滿足相應需求,故所需時間更短且時間分配更加合理。進行角色匹配作戰時間為675.6 s,無角色變換的作戰時間為699.3 s,基于角色匹配-任務分工策略所用的時間更短。可以看出,基于角色匹配-任務分工模型的無人機集群作戰導彈命中率較高,攻擊、制導時間較短,消耗彈藥較少,在戰場中具有較好的效果。
5 結語
本文采用基于狼群的生物學特性和行為機制,將狼群角色匹配-勞動分工模型應用于無人機集群,得到基于狼群的無人機集群角色匹配-任務分工模型,并進行任務分工,通過目標分配模型得到分配目標。通過空戰仿真實驗,比較了有角色匹配模型和無角色匹配模型的差異。結果表明角色匹配-任務分工方法能更加合理地運用戰場資源,提高作戰效能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19