混凝土結(jié)構(gòu)橋梁外觀智能檢測方法研究
2022-09-20 07:58:20張根合張建雄任勝龍
科技創(chuàng)新與應(yīng)用 2022年26期
張根合,張建雄,任勝龍
(中交公路養(yǎng)護(hù)工程技術(shù)有限公司,北京 100037)
在改革開放40多年的橋梁建設(shè)發(fā)展黃金期內(nèi),我國建造了大量的混凝土橋梁,由于國家交通線網(wǎng)不斷完善和物流行業(yè)飛速發(fā)展,超大型運輸車和超重車數(shù)量日益增多,公路交通量迅猛增長,這些橋梁大多已經(jīng)提前進(jìn)入“老齡化”[1],加上施工、材料退化、日益增長的交通壓力與橋梁管理養(yǎng)護(hù)理念發(fā)展滯后等原因,即使是在役新橋,在投入使用后不久便會出現(xiàn)裂縫等病害,隨著安全事故日益增多,嚴(yán)重影響橋梁的營運狀態(tài)與正常使用壽命[2-3],目前我國危橋比例約占橋梁總比例的1/9,且比例還在提高[4]。針對以上背景問題,行業(yè)內(nèi)提出建管養(yǎng)運一體化,將建管養(yǎng)運各環(huán)節(jié)可能遇到的問題,提前納入到設(shè)計階段協(xié)同考慮[5]。橋梁外觀定期檢測在橋梁運營階段不可忽視,及時發(fā)現(xiàn)結(jié)構(gòu)損傷能有效降低安全事故的發(fā)生率,是確保橋梁健康安全工作的前提。傳統(tǒng)混凝土橋梁外觀檢測是通過橋檢車?yán)闷渖炜s平臺將檢測人員送至橋梁指定位置進(jìn)行近距離目測經(jīng)驗估值[6],檢測危險性大,檢測工期長,且會受檢測人員的主觀性影響,不能客觀準(zhǔn)確評價混凝土橋梁的實際服役狀態(tài)[7]。針對以上問題,計算機圖像處理技術(shù)、遠(yuǎn)距離非接觸式的智能外觀檢測技術(shù)開始興起并成功運用于實際工程檢測當(dāng)中。
1 無人智能橋梁檢測車
無人橋檢車智能橋測系統(tǒng)主要由智能檢測車、機械手臂系統(tǒng)和圖像處理系統(tǒng)3部分組成[8]。無人智能橋梁檢測車如圖1所示。
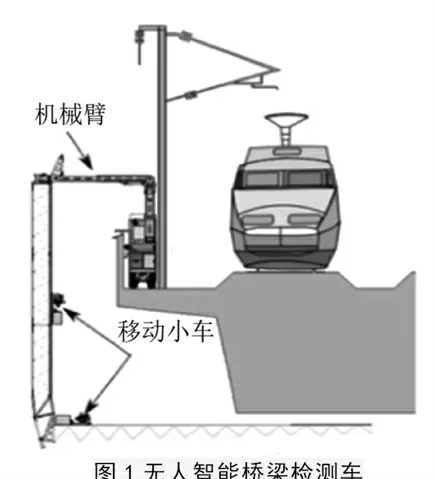
圖1 無人智能橋梁檢測車
機械手臂系統(tǒng)可拍攝整個預(yù)定范圍,圖像處理系統(tǒng)集照片拍攝、處理及分析功能于一體。在檢測車及機械手臂系統(tǒng)的輔助下,圖像處理系統(tǒng)可以用搭載的高分辨率工業(yè)電荷耦合器件(CCD)攝像機自動捕獲橋梁底表圖像,三維攝像機捕獲密集的三維點云,旋轉(zhuǎn)平臺上的激光測距儀(LRF)可以獲得橋梁底部表面的三維模型,然后與信息通信技術(shù)相結(jié)合,在高頻頻率下估計智能檢測系統(tǒng)的初始工作形態(tài)。利用獲取的三維橋梁模型,可完成圖像采集任務(wù)的規(guī)劃,包括檢測路徑規(guī)劃、多連桿臂的伸縮和遠(yuǎn)程檢測系統(tǒng)的定位規(guī)劃,無人橋檢車以最低速度按照規(guī)劃路線對圖像進(jìn)行采集,然后對一定數(shù)量的圖像進(jìn)行拼接成為清晰完整的圖像,用戶可依靠電腦輔助設(shè)計軟件協(xié)同專用插件瀏覽拼接生成的橋梁結(jié)構(gòu)全景圖,對橋梁缺陷進(jìn)行測量與統(tǒng)計分析,系統(tǒng)將裂紋檢測算法應(yīng)用于拼接全景圖,通過圖像采集及分析系統(tǒng)處理檢測到的橋梁缺陷,可以獲得良好的檢測結(jié)果,無人智能橋梁檢測車的裂縫檢測結(jié)果樣例如圖2所示。該系統(tǒng)極大提高了橋梁健康狀態(tài)評定及養(yǎng)護(hù)的效率、安全性和完整性。

圖2 無人智能橋梁檢測車裂縫檢測結(jié)果
2 以無人機為載體的橋梁裂縫檢測的圖像及深度學(xué)習(xí)檢測方法
無人橋檢車雖然省略了檢測員現(xiàn)場直接檢測的環(huán)節(jié),縮短了外業(yè)周期,但是采用圖像處理系統(tǒng)生成的結(jié)構(gòu)全景圖中的缺陷仍然需要人工去測量與統(tǒng)計,另外沒有擺脫必須搭腳手架或依附于橋檢車的問題,搭設(shè)腳手架或使用橋檢車進(jìn)行橋梁定期檢測通常會占用行車道,影響交通,增加道路部門和交警部門的成本投入[9],鑒于此,以無人機為載體的橋梁裂縫檢測的圖像及深度學(xué)習(xí)檢測方法得到迅速發(fā)展,走在了混凝土結(jié)構(gòu)橋梁裂縫檢測的前沿。
2.1 無人機檢測
隨著航拍和遙感技術(shù)不斷發(fā)展,無人機檢測技術(shù)已經(jīng)進(jìn)入到橋梁工程領(lǐng)域[10-12]。目前行業(yè)使用的無人機檢測系統(tǒng)由無人機、地面站、數(shù)據(jù)傳輸和任務(wù)荷載、攝影攝像系統(tǒng)及其他設(shè)備組成,系統(tǒng)的綜合性更有利于數(shù)據(jù)的檢測和收集。而隨著無人機技術(shù)的不斷發(fā)展,目前所使用的無人機都是結(jié)合橋梁檢測實際需求選擇的針對性技術(shù)形式,四旋翼無人機是目前使用最廣泛的多旋翼無人機,由電調(diào)直接驅(qū)動電機,并且結(jié)合發(fā)送給電調(diào)的脈沖寬度調(diào)制(PWM)信號控制電機的轉(zhuǎn)速,結(jié)合其各個旋翼與升力的關(guān)系自由控制速度,實現(xiàn)其對拍攝的角度和內(nèi)容的控制。無人機檢測流程可大致劃分為3個階段:飛行路徑規(guī)劃、病害數(shù)據(jù)采集和病害圖像數(shù)據(jù)處理,各階段涉及技術(shù)要點見表1。

表1 無人機檢測技術(shù)要點
2.2 無人機定位、導(dǎo)航技術(shù)
橋梁結(jié)構(gòu)復(fù)雜,體系多樣,且周邊環(huán)境復(fù)雜,不可避免會對近地飛行的無人機GPS信號造成干擾,故而無人機僅依靠GPS信號進(jìn)行定位和導(dǎo)航難以滿足橋梁檢測需求。此外,采集橋梁病害數(shù)據(jù)時還需獲取無人機與橋梁構(gòu)件的相對定位,明確病害位置。因此,為了保證無人機的定位除依靠GPS信號外,還需通過計算機視覺定位和超聲波定位等其他技術(shù)進(jìn)行輔助。計算機視覺定位技術(shù)較為成熟,應(yīng)用相對廣泛,缺點是對圖像處理和計算能力要求很高,易受光線、鏡面反射等因素的影響,其原理是對無人機視覺傳感器所獲取的各個方向的圖像進(jìn)行圖像處理和特征點提取,獲得目標(biāo)的圖像坐標(biāo),再反算獲取無人機的空中定位。超聲波定位技術(shù)成本低、適用性強,但測距限制較大,導(dǎo)航精度較差,其原理類似于聲吶系統(tǒng),利用超聲波的反射獲取不同方向障礙物的距離,依靠反射波確定無人機的空間定位。目前,2種輔助技術(shù)配合GPS信號定位導(dǎo)航基本可滿足橋梁檢測對無人機定位、導(dǎo)航技術(shù)的要求。
2.3 無人機飛行路徑智能規(guī)劃與自主避障技術(shù)
續(xù)航一直是無人機發(fā)展面臨的一個重要問題,其會影響無人機飛行檢測持續(xù)時間,此外,橋梁周邊環(huán)境復(fù)雜,存在各種障礙物,無人機在進(jìn)行橋梁檢測時極易發(fā)生碰撞、摔機等事故,因此,合理規(guī)劃無人機的飛行路徑與自主避障技術(shù)對提高橋梁檢測效率和質(zhì)量具有重要意義。路徑規(guī)劃是指在存在障礙物的環(huán)境中,為無人機尋找一條從起點到目標(biāo)點的安全路徑[13]。對無人機預(yù)設(shè)規(guī)劃路線進(jìn)行智能規(guī)劃需要引入相關(guān)算法,目前以人工勢場法[14-16]為代表的路線規(guī)劃自主避障技術(shù)已經(jīng)在無人機領(lǐng)域得到應(yīng)用與發(fā)展,但無人機進(jìn)行橋梁檢測需要橋下飛行,此項技術(shù)如何適用于橋下環(huán)境尚需進(jìn)一步研究。
2.4 檢測數(shù)據(jù)圖像識別技術(shù)
無人機檢測技術(shù)所采集的橋梁病害檢測影像數(shù)據(jù)不僅數(shù)量巨大,而且圖片重疊度較高,若采用人工查看不僅效率低,還會由于視神經(jīng)疲勞出現(xiàn)遺漏,為解決此問題,Yamaguchi等[17]提出了基于機器視覺的自動檢測系統(tǒng),圖像識別的準(zhǔn)確性和速度是機器自動檢測系統(tǒng)的關(guān)鍵。橋梁檢測領(lǐng)域機器視覺技術(shù)逐漸取代勞動密集型的人工檢測已成為必然。
科研工作者們在過去20年里嘗試基于圖像處理、模式識別和計算機視覺技術(shù),設(shè)計智能高效且勞動強度低的裂縫識別設(shè)備。基于圖像的裂縫檢測過程如圖3所示。
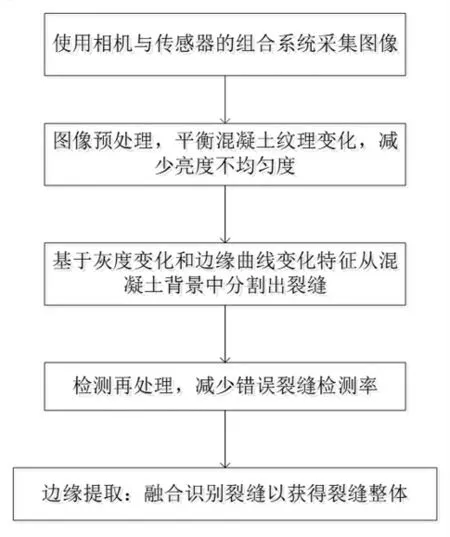
圖3 基于圖像的裂縫檢測過程
識別設(shè)備主要依賴于高精確的圖像分割算法,隨著發(fā)展先后出現(xiàn)了基于自適應(yīng)閾值的算法、基于濾波器的算法、基于深度學(xué)習(xí)(DL,Deep Learning)的圖像識別算法和基于Lab VIEW開發(fā)平臺+視覺開發(fā)模塊(Vision Development Module,VDM)的裂縫分析方法等[18-20],甚至將諸如人工神經(jīng)網(wǎng)絡(luò)和支持向量機等許多研究領(lǐng)域中最熱門的機器學(xué)習(xí)算法引入其中,利用這些機器學(xué)習(xí)技術(shù),對橋梁裂縫進(jìn)行分類[21-22]。近年來,隨著圖像采集和計算機運算能力飛躍式發(fā)展,在圖像識別領(lǐng)域又提出了一種更高效的機器學(xué)習(xí)算法——基于卷積神經(jīng)網(wǎng)絡(luò)框架的深度學(xué)習(xí),該技術(shù)利用卷積神經(jīng)網(wǎng)絡(luò)的深層特征框架檢測混凝土裂縫,不需要人工設(shè)定裂縫特征,深度融合卷積神經(jīng)網(wǎng)絡(luò)經(jīng)過不斷改進(jìn)已經(jīng)運用到鋼箱梁內(nèi)部裂縫檢測中[23]。基于深度學(xué)習(xí)的自主圖像識別技術(shù)已經(jīng)在橋梁裂縫檢測方面得到應(yīng)用,目前,自主圖像識別技術(shù)可識別出寬度為0.1 mm的裂縫,雖然適用于橋梁裂縫檢測數(shù)據(jù)圖像識別的需求,但其識別精度還有待進(jìn)一步提高。
3 結(jié)束語
由于建設(shè)背景與國內(nèi)交通環(huán)境的綜合影響,我國大量在役混凝土橋梁進(jìn)入“老齡化”,為確保服役橋梁健康安全,對其實際營運狀態(tài)與服役壽命需要進(jìn)行及時評估,從而促進(jìn)混凝土結(jié)構(gòu)橋梁外觀檢測技術(shù)的發(fā)展。在橋梁智能化時代,遠(yuǎn)距離非接觸式的智能檢測技術(shù)興起,其核心技術(shù)為自主圖像識別技術(shù),未來橋梁外觀智能檢測技術(shù)發(fā)展的方向?qū)⑹侨绾胃倪M(jìn)裂縫識別算法,進(jìn)一步提高自主圖像識別精度。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2019年4期)2019-04-22 03:28:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04
