基于級(jí)聯(lián)擴(kuò)張觀測(cè)器的永磁電機(jī)無(wú)傳感器自抗擾控制策略
2022-09-26 07:54:40朱良紅張國(guó)強(qiáng)李宇欣王高林徐殿國(guó)
電工技術(shù)學(xué)報(bào) 2022年18期
關(guān)鍵詞:控制策略
朱良紅 張國(guó)強(qiáng) 李宇欣 王高林 徐殿國(guó)
基于級(jí)聯(lián)擴(kuò)張觀測(cè)器的永磁電機(jī)無(wú)傳感器自抗擾控制策略
朱良紅1,2張國(guó)強(qiáng)1李宇欣1王高林1徐殿國(guó)1
(1. 哈爾濱工業(yè)大學(xué)電氣工程及自動(dòng)化學(xué)院 哈爾濱 150001 2. 廣東美的制冷設(shè)備有限公司 佛山 528311)
針對(duì)永磁電機(jī)矢量控制系統(tǒng)安裝位置傳感器導(dǎo)致可靠性降低、抗干擾能力下降等問題,采用高頻脈沖電壓信號(hào)注入法實(shí)現(xiàn)電機(jī)在零低速無(wú)傳感器控制運(yùn)行。在此基礎(chǔ)上,為了改善無(wú)傳感器系統(tǒng)采用傳統(tǒng)控制方法導(dǎo)致系統(tǒng)剛度下降的問題,該文提出一種改進(jìn)的轉(zhuǎn)速環(huán)線性自抗擾控制策略,利用級(jí)聯(lián)的擴(kuò)張狀態(tài)觀測(cè)器估計(jì)系統(tǒng)所受的集總擾動(dòng),減小傳統(tǒng)線性擴(kuò)張狀態(tài)觀測(cè)器對(duì)于斜坡型擾動(dòng)的估計(jì)誤差,以提高系統(tǒng)對(duì)擾動(dòng)的估計(jì)精度,增強(qiáng)魯棒性。最后,在7.5kW永磁電機(jī)對(duì)拖加載實(shí)驗(yàn)平臺(tái)進(jìn)行實(shí)驗(yàn),驗(yàn)證了控制策略的有效性。
永磁同步電機(jī) 無(wú)傳感器 自抗擾控制器 級(jí)聯(lián)擴(kuò)張狀態(tài)觀測(cè)器
0 引言
永磁同步電機(jī)(Permanent Magnet Synchronous Motor, PMSM)因高效率、高轉(zhuǎn)矩密度和高功率密度等優(yōu)勢(shì)被廣泛應(yīng)用于工業(yè)傳動(dòng)及家用電器等場(chǎng) 合[1-2]。在永磁電機(jī)矢量控制系統(tǒng)中,準(zhǔn)確獲取轉(zhuǎn)子位置信息是實(shí)現(xiàn)高性能控制的關(guān)鍵環(huán)節(jié)[3]。傳統(tǒng)方法通常需要在電機(jī)軸端部安裝位置傳感器。然而,位置傳感器的使用導(dǎo)致系統(tǒng)體積變大、成本增加,而且位置傳感器信號(hào)易受到外界環(huán)境的影響,給系統(tǒng)帶來可靠性降低、魯棒性下降等諸多問題。為了進(jìn)一步提升永磁電機(jī)系統(tǒng)應(yīng)用適應(yīng)性,無(wú)傳感器控制成為電力傳動(dòng)領(lǐng)域的熱門課題[4]。當(dāng)電機(jī)零低速運(yùn)行時(shí),由于反電動(dòng)勢(shì)較低,模型法不再適用[5-8],通常需要注入額外信號(hào)獲取轉(zhuǎn)子位置及轉(zhuǎn)速信息[9-20]。
此外,隨著對(duì)永磁電機(jī)系統(tǒng)控制性能要求的不斷提升,傳統(tǒng)控制器的缺陷日益顯露,為了進(jìn)一步滿足無(wú)位置傳感器控制系統(tǒng)低速運(yùn)行需求,研究性能更加優(yōu)越的控制器具有重要理論意義和應(yīng)用價(jià) 值[21-22]。自抗擾控制策略對(duì)擾動(dòng)具有強(qiáng)魯棒性的優(yōu)點(diǎn),在永磁電機(jī)系統(tǒng)中得到了廣泛應(yīng)用。文獻(xiàn)[23]采用一階自抗擾控制器實(shí)現(xiàn)轉(zhuǎn)速閉環(huán)控制,為了簡(jiǎn)化結(jié)構(gòu),取消了跟蹤微分器,并將擴(kuò)張狀態(tài)觀測(cè)器(Extended State Observer, ESO)和狀態(tài)誤差反饋環(huán)節(jié)線性化,與傳統(tǒng)PI控制器相比,動(dòng)態(tài)性能和抗擾性能都得到了明顯改善。文獻(xiàn)[24]考慮轉(zhuǎn)速反饋環(huán)節(jié)濾波時(shí)間常數(shù)的影響,將轉(zhuǎn)速環(huán)擴(kuò)張為二階系統(tǒng),并針對(duì)其設(shè)計(jì)三階ESO,對(duì)濾波前的轉(zhuǎn)速進(jìn)行觀測(cè),從而消除濾波器對(duì)系統(tǒng)動(dòng)態(tài)性能的影響。文獻(xiàn)[25]采用正負(fù)脈沖電壓信號(hào)注入法獲取位置信息,提出了一種改進(jìn)的線性自抗擾控制(Linear Active Disturbance Rejection Control, LADRC)策略,提高了內(nèi)置式永磁同步電機(jī)無(wú)位置傳感器控制系統(tǒng)的抗擾性能。文獻(xiàn)[26]針對(duì)二階自抗擾控制器存在建模誤差,且對(duì)時(shí)變輸入跟蹤精度較差的問題,提出了一種改進(jìn)的模型補(bǔ)償自抗擾控制器,通過模型補(bǔ)償改善系統(tǒng)對(duì)擾動(dòng)的觀測(cè)精度,并引入輸入微分前饋消除建模誤差,進(jìn)一步提高了系統(tǒng)對(duì)時(shí)變輸入的跟蹤能力。文獻(xiàn)[27]通過辨識(shí)轉(zhuǎn)動(dòng)慣量和粘滯摩擦因數(shù),減輕了ESO對(duì)擾動(dòng)的估計(jì)負(fù)擔(dān),提高了擾動(dòng)估計(jì)精度,但增加了算法的復(fù)雜性,同時(shí)控制器的參數(shù)設(shè)計(jì)較為復(fù)雜。文獻(xiàn)[28]提出了一種將高頻電流注入法和線性擴(kuò)張狀態(tài)觀測(cè)器(Linear ESO, LESO)相結(jié)合的無(wú)位置傳感器控制策略,減小了觀測(cè)器相位延遲和速度抖動(dòng),提高了系統(tǒng)對(duì)階躍型負(fù)載的抗擾能力。文獻(xiàn)[29]提出了一種線性-非線性切換的自抗擾控制策略,改進(jìn)了無(wú)位置傳感器控制系統(tǒng)的反饋功能。該方法結(jié)合了LESO對(duì)擾動(dòng)的良好耐受性和非線性ESO的高估計(jì)精度,而且降低了非線性ESO對(duì)參數(shù)的敏感性,然而該控制系統(tǒng)參數(shù)較多,非線性自抗擾控制系統(tǒng)在參數(shù)整定和穩(wěn)定性方面存在困難。
為此,本文提出一種基于級(jí)聯(lián)擴(kuò)張觀測(cè)器自抗擾理論的永磁電機(jī)無(wú)位置傳感器控制策略,以提高系統(tǒng)對(duì)擾動(dòng)的魯棒性。利用級(jí)聯(lián)的ESO估計(jì)系統(tǒng)所受的集總擾動(dòng),對(duì)其進(jìn)行補(bǔ)償,并通過極點(diǎn)配置方法整定參數(shù)。所研究的改進(jìn)LESO可以準(zhǔn)確估計(jì)斜坡變化的擾動(dòng),且無(wú)穩(wěn)態(tài)誤差。最后,通過7.5kW永磁電機(jī)對(duì)拖加載平臺(tái)進(jìn)行實(shí)驗(yàn)驗(yàn)證。
1 基于高頻脈沖電壓注入的轉(zhuǎn)子位置估計(jì)
圖1為基于改進(jìn)自抗擾算法的永磁同步電機(jī)無(wú)傳感器控制策略框圖。在dq坐標(biāo)系中注入高頻脈沖電壓信號(hào),在ab坐標(biāo)系中提取高頻響應(yīng)電流,并估計(jì)轉(zhuǎn)子位置和轉(zhuǎn)速信息,分別用于坐標(biāo)變換和轉(zhuǎn)速反饋。其中采用級(jí)聯(lián)ESO估計(jì)系統(tǒng)所受的集總擾動(dòng),并結(jié)合自抗擾控制器實(shí)現(xiàn)轉(zhuǎn)速閉環(huán)控制。
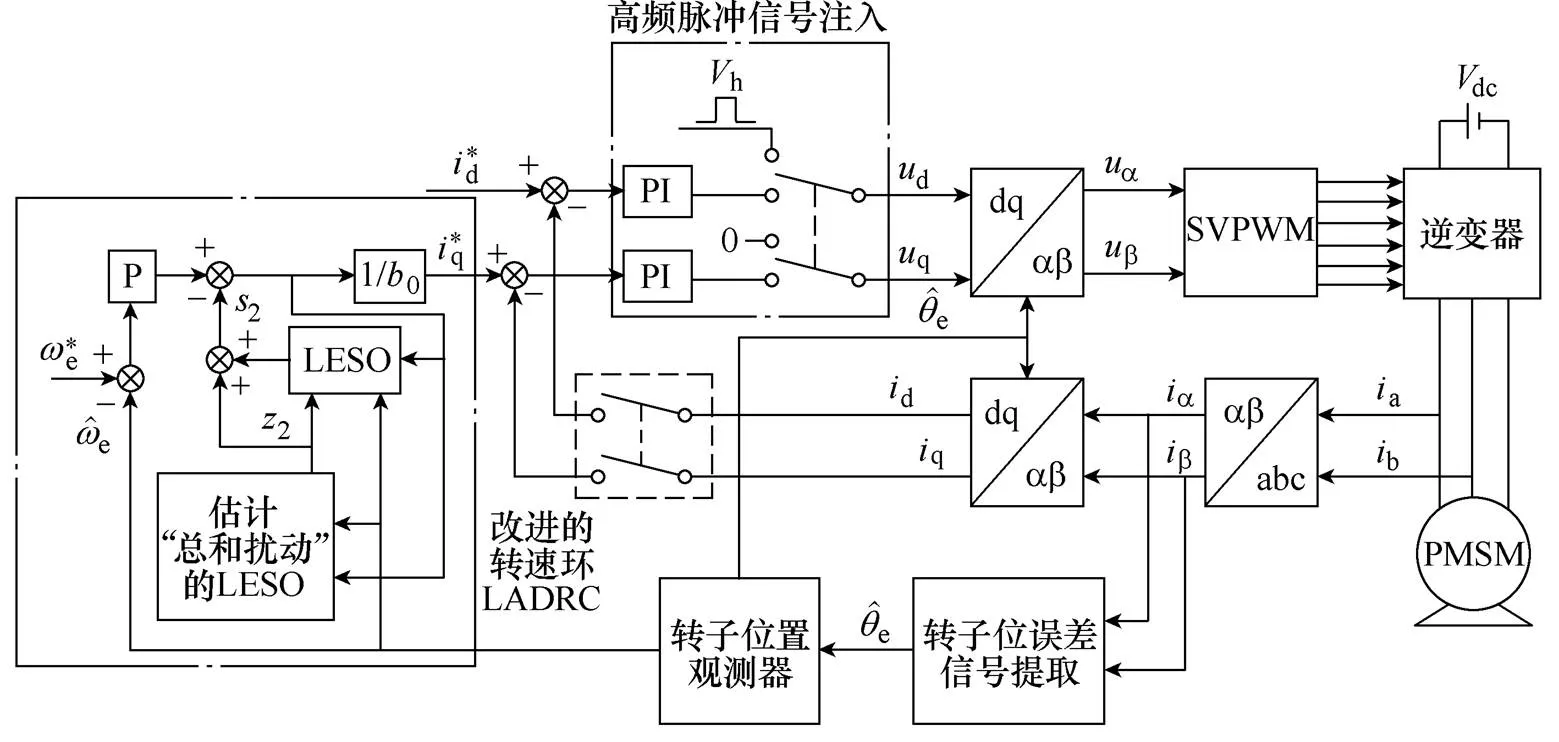
圖1 基于改進(jìn)自抗擾算法的PMSM無(wú)傳感器控制框圖
高頻脈沖電壓信號(hào)注入過程相當(dāng)于在定子電壓d、q處設(shè)置一個(gè)“高頻開關(guān)”,當(dāng)處于磁場(chǎng)定向控制周期時(shí),開關(guān)切換到電流環(huán)PI控制器的輸出端,形成雙閉環(huán)矢量控制,由于沒有高頻信號(hào)注入,因此可以避免高頻分量對(duì)電流環(huán)的影響;當(dāng)處于注入周期時(shí),切斷正常的磁場(chǎng)定向控制,包括電流調(diào)節(jié)器輸出通道和電流反饋通道,從而避免電流環(huán)調(diào)節(jié)量對(duì)高頻電流的影響,注入時(shí)序如圖2所示,通過向估計(jì)的直軸注入幅值為h的電壓分量,估計(jì)的交軸注入零電壓分量,對(duì)實(shí)時(shí)檢測(cè)到的電流信號(hào)(不含基頻分量)進(jìn)行處理,實(shí)現(xiàn)對(duì)轉(zhuǎn)子位置及轉(zhuǎn)速信息的有效獲取。該高頻脈沖電壓注入形式與傳統(tǒng)疊加注入方法均可以準(zhǔn)確估計(jì)轉(zhuǎn)子位置,該形式可以保證控制周期的采樣電流中沒有附加高頻分量,而注入周期的采樣電流沒有基頻分量的影響,從而無(wú)需使用數(shù)字濾波器,有利于減小相位滯后和系統(tǒng)延時(shí)[30]。

圖2 高頻脈沖電壓信號(hào)注入時(shí)序
采用單向脈沖信號(hào)注入代替正負(fù)脈沖信號(hào)注入可以進(jìn)一步提高注入頻率和控制頻率,減少電流采樣點(diǎn)個(gè)數(shù),使算法和程序設(shè)計(jì)得到簡(jiǎn)化。對(duì)于電感較小的電機(jī)驅(qū)動(dòng)系統(tǒng),采用單向脈沖信號(hào)注入時(shí)電感續(xù)流時(shí)間很短,高頻脈沖響應(yīng)電流快速衰減,對(duì)磁場(chǎng)定向控制周期采集的基波電流影響較小。
當(dāng)電機(jī)低速運(yùn)行時(shí),注入的高頻信號(hào)頻率遠(yuǎn)高于運(yùn)行頻率,可以忽略定子電阻壓降及反電動(dòng)勢(shì)相關(guān)項(xiàng),則靜止坐標(biāo)系下永磁電機(jī)高頻數(shù)學(xué)模型可表示為

其中

由于在估計(jì)的直軸注入電壓分量,可以得到

其中
利用電流差分信號(hào)代替微分信號(hào),D為電流兩次采樣時(shí)間間隔,便可進(jìn)一步得到

式中,Dah和Dbh分別為a、b軸定子高頻電流變化量;ah1、bh1和ah0、bh0分別為兩個(gè)連續(xù)采樣周期內(nèi)的a、b軸定子高頻電流。
通過注入周期內(nèi)兩次電流采樣值作差,可以獲得一組包含轉(zhuǎn)子位置信息的正交信號(hào)。為了使估計(jì)的轉(zhuǎn)子位置更為平滑,采用正交鎖相環(huán)(Phase Locked Loop, PLL)獲取轉(zhuǎn)子位置信息。首先將Dah與Dbh進(jìn)行幅值歸一化處理得到cos與sin,從而減小直軸電感參數(shù)以及注入信號(hào)幅值變化對(duì)轉(zhuǎn)子位置估計(jì)精度的影響,再通過外差法獲取轉(zhuǎn)子位置誤差,最后將其作為轉(zhuǎn)子位置觀測(cè)器的輸入,便可實(shí)現(xiàn)對(duì)轉(zhuǎn)子位置的觀測(cè)[7],轉(zhuǎn)子位置估計(jì)信號(hào)處理框圖如圖3所示,外差法的表達(dá)式為

2 基于級(jí)聯(lián)的自抗擾控制策略
2.1 傳統(tǒng)轉(zhuǎn)速環(huán)線性自抗擾控制策略分析

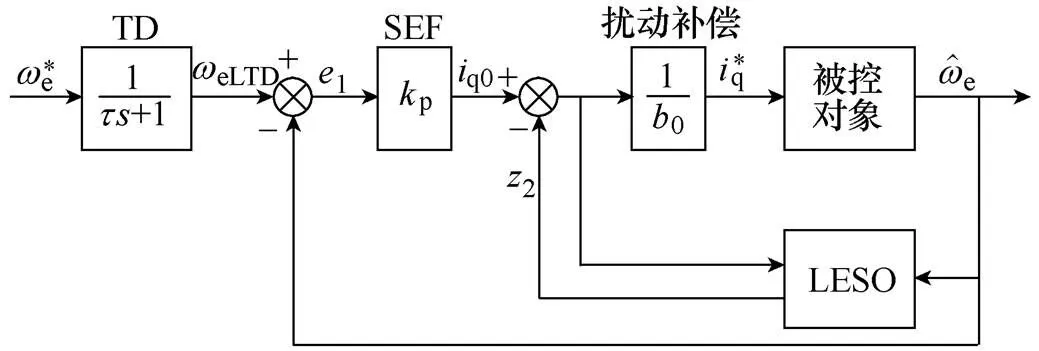
圖4 傳統(tǒng)線性自抗擾控制器結(jié)構(gòu)


其中

LESO可以根據(jù)被控對(duì)象的輸入和輸出信號(hào),觀測(cè)出包含擴(kuò)張狀態(tài)在內(nèi)的所有狀態(tài)變量。因此,二階LESO的數(shù)學(xué)模型為

當(dāng)采用比例環(huán)節(jié)對(duì)其進(jìn)行線性狀態(tài)誤差反饋時(shí),可以得到
式中,p為線性自抗擾控制器比例環(huán)節(jié)比例系數(shù)。
擾動(dòng)補(bǔ)償是用集總擾動(dòng)的估計(jì)值2對(duì)線性狀態(tài)誤差反饋的輸出量進(jìn)行補(bǔ)償,從而獲得最終的控制量為
擾動(dòng)補(bǔ)償?shù)倪^程將多階系統(tǒng)補(bǔ)償成積分器串聯(lián)型系統(tǒng),將一階系統(tǒng)補(bǔ)償成積分型系統(tǒng),使其不再受不確定擾動(dòng)的影響,即為
2.2 改進(jìn)的轉(zhuǎn)速環(huán)線性自抗擾控制策略
由式(9)可知,在傳統(tǒng)線性自抗擾控制器中,系統(tǒng)所受“集總擾動(dòng)”作用2和其估計(jì)值2在頻域的傳遞函數(shù)為
當(dāng)“集總擾動(dòng)”作用2以為斜率的斜坡變化時(shí),將LESO的極點(diǎn)配置在帶寬0處,可以得到對(duì)擾動(dòng)的估計(jì)量為
將其變換到時(shí)域,則2的響應(yīng)可表示為
可以看出,當(dāng)“集總擾動(dòng)”作用2以為斜率的斜坡變化時(shí),傳統(tǒng)線性自抗擾控制器對(duì)擾動(dòng)的估計(jì)值2存在穩(wěn)態(tài)誤差-2/0。因此,本文提出一種改進(jìn)的轉(zhuǎn)速環(huán)線性自抗擾控制策略。
首先,取消跟蹤微分器環(huán)節(jié),一階線性跟蹤微分器相當(dāng)于濾波器。為了簡(jiǎn)化系統(tǒng)的結(jié)構(gòu),減小相位滯后和系統(tǒng)延時(shí),改善系統(tǒng)動(dòng)態(tài)性能,在轉(zhuǎn)速環(huán)LADRC的設(shè)計(jì)中,省去跟蹤微分器環(huán)節(jié);其次,采用兩個(gè)二階ESO級(jí)聯(lián)的方式,其中一個(gè)二階ESO用于估計(jì)系統(tǒng)所受“集總擾動(dòng)”的作用,并將估計(jì)值2作為另一個(gè)二階ESO的“已知擾動(dòng)”作用部分,因此其只需估計(jì)除了“已知擾動(dòng)”作用外的“未知擾動(dòng)”作用即可,從而減輕對(duì)擾動(dòng)的估計(jì)負(fù)擔(dān),有利于估計(jì)精度的提高。基于級(jí)聯(lián)ESO的改進(jìn)線性自抗擾控制框圖如圖5所示。
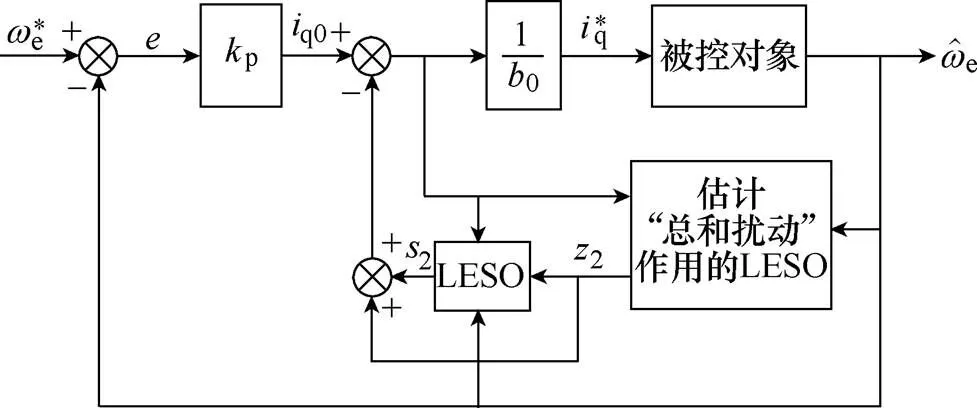
圖5 基于級(jí)聯(lián)ESO的改進(jìn)線性自抗擾控制框圖
類似于式(9),將2作為另一個(gè)LESO的“已知擾動(dòng)”作用部分,可以得到第二個(gè)LESO數(shù)學(xué)模型的表達(dá)式為
基于級(jí)聯(lián)ESO的改進(jìn)LADRC仍采用比例控制作為狀態(tài)誤差反饋環(huán)節(jié),相比于傳統(tǒng)線性自抗擾控制器,采用LESO對(duì)擾動(dòng)的估計(jì)值2進(jìn)行補(bǔ)償,改進(jìn)線性自抗擾控制器利用兩個(gè)LESO級(jí)聯(lián)提高擾動(dòng)估計(jì)精度。通過兩個(gè)LESO對(duì)擾動(dòng)的估計(jì)值2和2之和進(jìn)行補(bǔ)償,補(bǔ)償過程為
改進(jìn)后系統(tǒng)所受“集總擾動(dòng)”作用2和其估計(jì)值2+2在頻域下的傳遞函數(shù)為

當(dāng)系統(tǒng)所受“集總擾動(dòng)”作用2以為斜率的斜坡變化時(shí),將兩個(gè)LESO的極點(diǎn)均配置在0處,可以得到兩次擾動(dòng)估計(jì)值的集總,其時(shí)域響應(yīng)為

因此,當(dāng)“集總擾動(dòng)”作用發(fā)生斜坡變化時(shí),改進(jìn)線性自抗擾控制器對(duì)擾動(dòng)的估計(jì)無(wú)穩(wěn)態(tài)誤差。相比于傳統(tǒng)線性自抗擾控制器,提高了對(duì)擾動(dòng)的估計(jì)精度,增強(qiáng)了系統(tǒng)對(duì)擾動(dòng)的魯棒性。
圖6為傳統(tǒng)LADRC與改進(jìn)LADRC對(duì)擾動(dòng)的估計(jì)誤差對(duì)比結(jié)果,箭頭方向表示LESO帶寬增加的方向。其中,改變LESO的帶寬0,使其從50rad/s開始以10rad/s為步進(jìn)增大到100rad/s,“集總擾動(dòng)”作用以10為斜率發(fā)生斜坡變化。由圖6可見,隨著LESO帶寬的增加,無(wú)論是傳統(tǒng)LADRC還是改進(jìn)LADRC,對(duì)擾動(dòng)的估計(jì)速度有所增大,估計(jì)誤差不斷減小。當(dāng)“集總擾動(dòng)”作用發(fā)生斜坡變化時(shí),傳統(tǒng)LADRC對(duì)擾動(dòng)的估計(jì)值存在穩(wěn)態(tài)誤差,帶寬越高,穩(wěn)態(tài)誤差的絕對(duì)值越小;而對(duì)于改進(jìn)LADRC,擾動(dòng)估計(jì)值穩(wěn)態(tài)誤差為零,提高了對(duì)擾動(dòng)的估計(jì)精度。
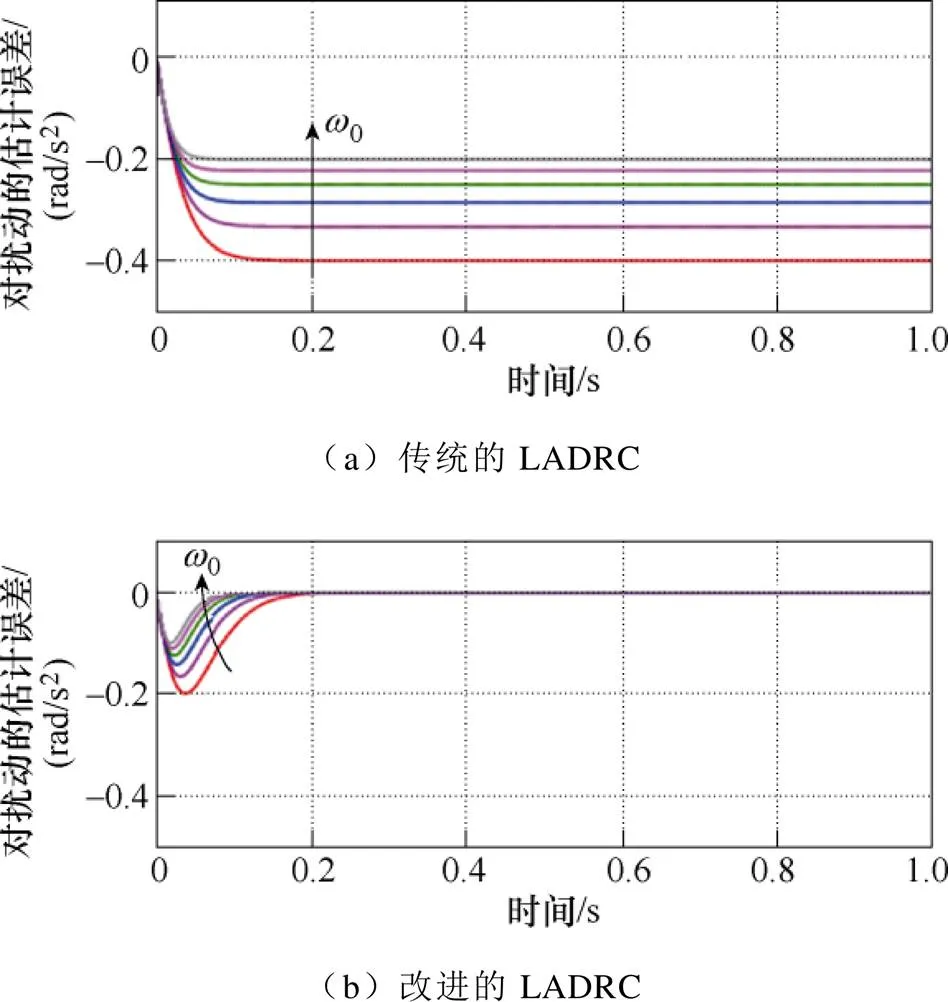
圖6 ESO帶寬對(duì)擾動(dòng)觀測(cè)性能的影響
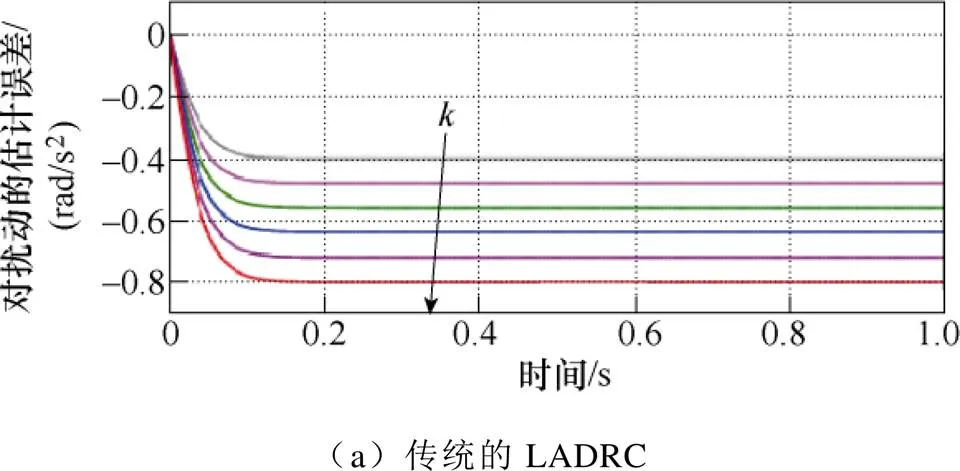
當(dāng)LESO的帶寬0=50rad/s時(shí),改變“集總擾動(dòng)”作用的斜率,使其從10開始以2為步長(zhǎng)增大到20。圖7為傳統(tǒng)LADRC與改進(jìn)LADRC對(duì)擾動(dòng)的估計(jì)誤差,箭頭方向表示增加的方向。隨著“集總擾動(dòng)”斜率的增大,無(wú)論是傳統(tǒng)LADRC還是改進(jìn)LADRC,對(duì)擾動(dòng)的估計(jì)速度不變,但是估計(jì)誤差不斷增大。當(dāng)“集總擾動(dòng)”作用發(fā)生斜坡變化時(shí),傳統(tǒng)LADRC對(duì)擾動(dòng)的估計(jì)值存在穩(wěn)態(tài)誤差,“總和擾動(dòng)”的斜率越大,穩(wěn)態(tài)誤差的絕對(duì)值越大。對(duì)于改進(jìn)LADRC,使用兩個(gè)LESO級(jí)聯(lián)對(duì)擾動(dòng)進(jìn)行二次估計(jì),因此擾動(dòng)估計(jì)值的穩(wěn)態(tài)誤差為零,減輕了每個(gè)LESO的估計(jì)負(fù)擔(dān),提高了對(duì)擾動(dòng)的估計(jì)精度,改善了系統(tǒng)剛度。
2.3 轉(zhuǎn)速環(huán)線性自抗擾控制器參數(shù)整定
經(jīng)過LESO以及擾動(dòng)補(bǔ)償后,轉(zhuǎn)速環(huán)可以等效成一個(gè)一階慣性環(huán)節(jié),比例環(huán)節(jié)的增益為轉(zhuǎn)速環(huán)帶寬,可以根據(jù)選定的轉(zhuǎn)速環(huán)帶寬來確定線性狀態(tài)誤差反饋的比例增益。
3 實(shí)驗(yàn)結(jié)果
采用圖1所示的PMSM無(wú)傳感器自抗擾控制策略,在如圖8所示的7.5kW表貼式永磁電機(jī)對(duì)拖加載實(shí)驗(yàn)平臺(tái)上進(jìn)行驗(yàn)證。為改善高頻信號(hào)注入法應(yīng)用效果,采用注入d軸偏置電流的方式激發(fā)表貼式永磁電機(jī)產(chǎn)生飽和凸極效應(yīng),提高零低速區(qū)間無(wú)位置傳感器控制性能。采用線性擬合的方法調(diào)整d軸偏置電流注入值,空載時(shí)注入值為5% 額定電流,額定負(fù)載時(shí)注入值為20% 額定電流。將兩臺(tái)同型號(hào)永磁電機(jī)同軸連接,其中一臺(tái)用來模擬負(fù)載。電機(jī)軸端部安裝位置傳感器,用于實(shí)時(shí)檢測(cè)轉(zhuǎn)子位置信息,驗(yàn)證所研究方法的有效性。本文主要針對(duì)所研究的改進(jìn)轉(zhuǎn)速環(huán)線性自抗擾控制策略的實(shí)驗(yàn)效果進(jìn)行驗(yàn)證,因此在實(shí)驗(yàn)過程中未考慮由d軸和q軸電流在重載條件下引起的磁場(chǎng)交叉飽和效應(yīng)對(duì)無(wú)位置傳感器控制性能的影響,后續(xù)將針對(duì)此問題進(jìn)一步展開研究。逆變器開關(guān)頻率為8kHz,主控制芯片為數(shù)字信號(hào)處理(Digital Signal Processing, DSP)芯片,型號(hào)為TMS320F28075。永磁同步電機(jī)參數(shù)見表1。實(shí)驗(yàn)過程中高頻電壓注入幅值選取為62V,由于所用電機(jī)電感值較小,因此高頻響應(yīng)電流較大,有助于進(jìn)一步激發(fā)飽和凸極效應(yīng),實(shí)現(xiàn)電機(jī)無(wú)位置傳感器穩(wěn)定運(yùn)行,為驗(yàn)證所研究的改進(jìn)自抗擾控制策略的有效性提供保障。

圖8 實(shí)驗(yàn)平臺(tái)
表1 永磁同步電機(jī)參數(shù)

Tab.1 Parameters of permanent magnet synchronous motor
為了保證系統(tǒng)穩(wěn)定性,同時(shí)獲得較快的響應(yīng)速度,ESO的極點(diǎn)選為=60。為了與PI控制進(jìn)行對(duì)比,速度環(huán)的PI參數(shù)經(jīng)過整定,取得最優(yōu)化的控制參數(shù),轉(zhuǎn)速環(huán)比例系數(shù)和積分系數(shù)分別為p=15,i=0.2。經(jīng)計(jì)算與實(shí)驗(yàn)調(diào)試,線性自抗擾控制器中p=200,0=7.06。為了減小級(jí)聯(lián)ESO產(chǎn)生的超調(diào),二級(jí)ESO極點(diǎn)選取應(yīng)略小于一級(jí)ESO,故ESO的極點(diǎn)分別設(shè)置在20和40。
3.1 PI控制實(shí)驗(yàn)結(jié)果
圖9為電機(jī)運(yùn)行在給定頻率3Hz條件下,突加100%額定負(fù)載轉(zhuǎn)矩,速度環(huán)采用PI調(diào)節(jié)器的無(wú)位置傳感器控制實(shí)驗(yàn)結(jié)果。圖9中分別給出利用高頻信號(hào)注入法得到的觀測(cè)轉(zhuǎn)速、轉(zhuǎn)子位置及a相電流波形。從實(shí)驗(yàn)結(jié)果中可見,當(dāng)速度環(huán)采用PI控制時(shí),系統(tǒng)的剛度較差。在突加100%額定負(fù)載轉(zhuǎn)矩時(shí)轉(zhuǎn)速跌落與恢復(fù)時(shí)間分別為11.2Hz和600ms。
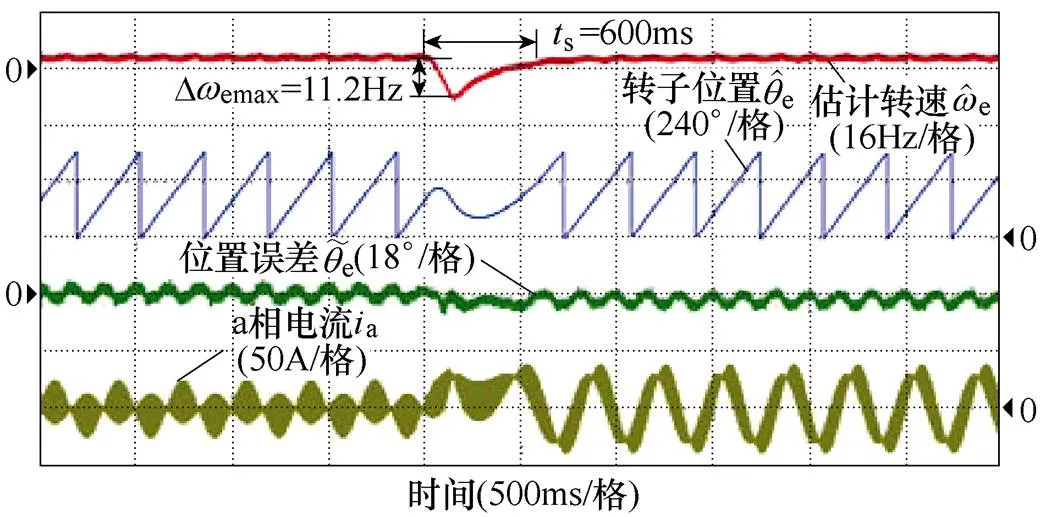
圖9 PI控制下的實(shí)驗(yàn)結(jié)果
3.2 線性自抗擾控制器實(shí)驗(yàn)結(jié)果
圖10和圖11分別為電機(jī)無(wú)位置傳感器運(yùn)行在給定頻率3Hz條件下,突加100%額定負(fù)載轉(zhuǎn)矩時(shí),速度環(huán)采用傳統(tǒng)LADRC和改進(jìn)LADRC調(diào)節(jié)器時(shí)對(duì)擾動(dòng)估計(jì)的實(shí)驗(yàn)結(jié)果。從擾動(dòng)估計(jì)誤差對(duì)比可以看出,采用傳統(tǒng)自抗擾控制器完全跟蹤階躍負(fù)載的時(shí)間為450ms,而采用改進(jìn)自抗擾控制器跟蹤時(shí)間為350ms,相較傳統(tǒng)控制器減少22.2%。因此,改進(jìn)LADRC控制器具有更快的擾動(dòng)估計(jì)速度。
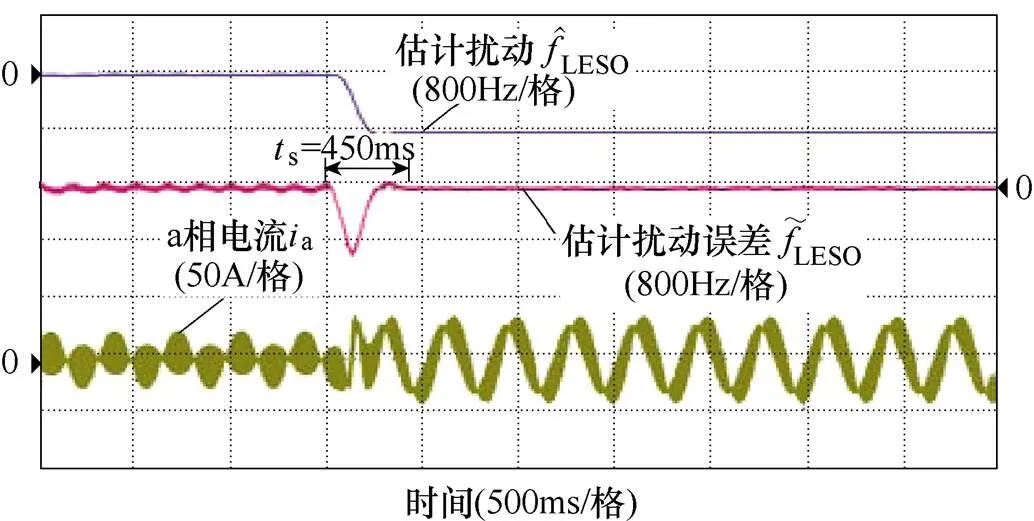
圖10 LADRC擾動(dòng)觀測(cè)實(shí)驗(yàn)結(jié)果
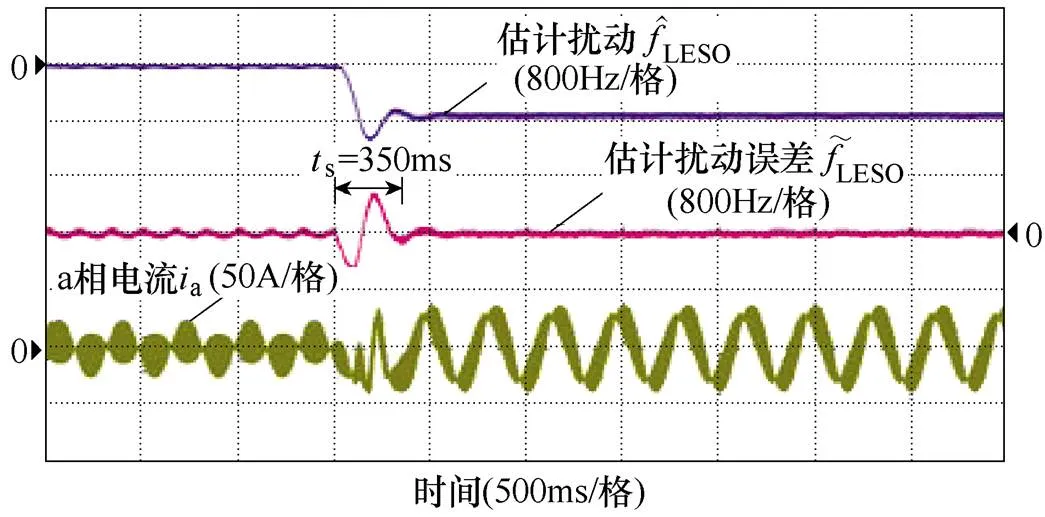
圖11 改進(jìn)LADRC擾動(dòng)觀測(cè)實(shí)驗(yàn)結(jié)果
圖12和圖13分別為相同運(yùn)行環(huán)境下速度環(huán)采用傳統(tǒng)LADRC和改進(jìn)LADRC調(diào)節(jié)器時(shí)的無(wú)位置傳感器實(shí)驗(yàn)結(jié)果。由于ADRC中的ESO可以估計(jì)并補(bǔ)償電機(jī)加載過程所受的擾動(dòng),因此當(dāng)速度環(huán)采用傳統(tǒng)LADRC時(shí),在突加100%額定負(fù)載時(shí),轉(zhuǎn)速跌落與恢復(fù)時(shí)間分別減小至7.9Hz和390ms。由于級(jí)聯(lián)ESO可以進(jìn)一步估計(jì)系統(tǒng)所受擾動(dòng),提高對(duì)于擾動(dòng)的估計(jì)速度。因此,當(dāng)速度環(huán)采用改進(jìn)LADRC時(shí),電機(jī)在突加100%額定負(fù)載時(shí)轉(zhuǎn)速跌落為5.6Hz,恢復(fù)時(shí)間進(jìn)一步減小至270ms。根據(jù)實(shí)驗(yàn)對(duì)比,由于系統(tǒng)所加負(fù)載是階躍型負(fù)載,階躍后負(fù)載大小不再變化,此時(shí)斜率=0。因此,在穩(wěn)態(tài)條件下,傳統(tǒng)和改進(jìn)方法都無(wú)穩(wěn)態(tài)誤差。但是,在暫態(tài)調(diào)整過程中,由于擾動(dòng)估計(jì)誤差的存在,傳統(tǒng)自抗擾控制器的轉(zhuǎn)速跌落更為明顯,恢復(fù)時(shí)間更長(zhǎng),改進(jìn)自抗擾控制器具有更快的響應(yīng)速度,增強(qiáng)了系統(tǒng)對(duì)擾動(dòng)的剛度。雖然當(dāng)電機(jī)突加負(fù)載時(shí),相比于PI控制器,轉(zhuǎn)速跌落明顯減小,但由于級(jí)聯(lián)的ESO增加了系統(tǒng)的階數(shù),因此在調(diào)整過程中系統(tǒng)的超調(diào)量變大,可以通過調(diào)整級(jí)聯(lián)ESO的極點(diǎn)配置來調(diào)節(jié)。
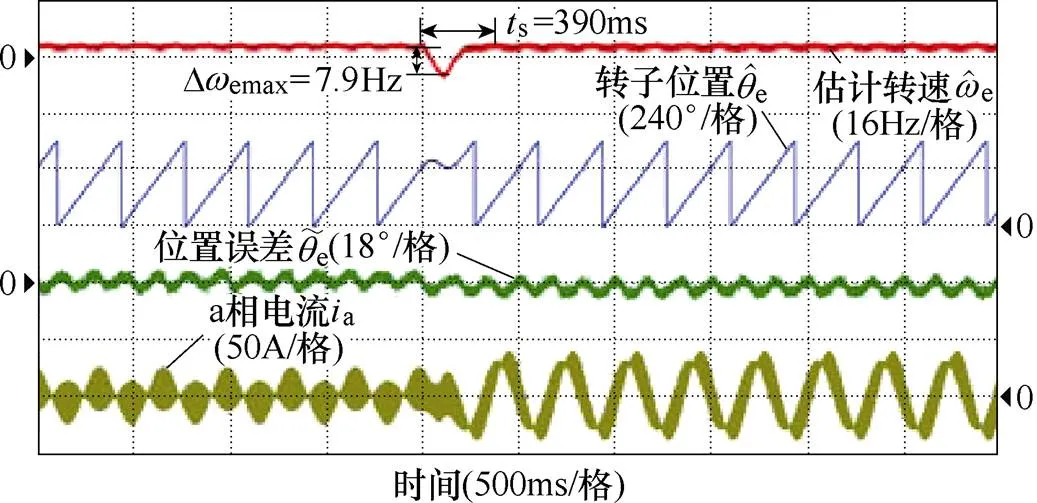
圖12 LADRC實(shí)驗(yàn)結(jié)果
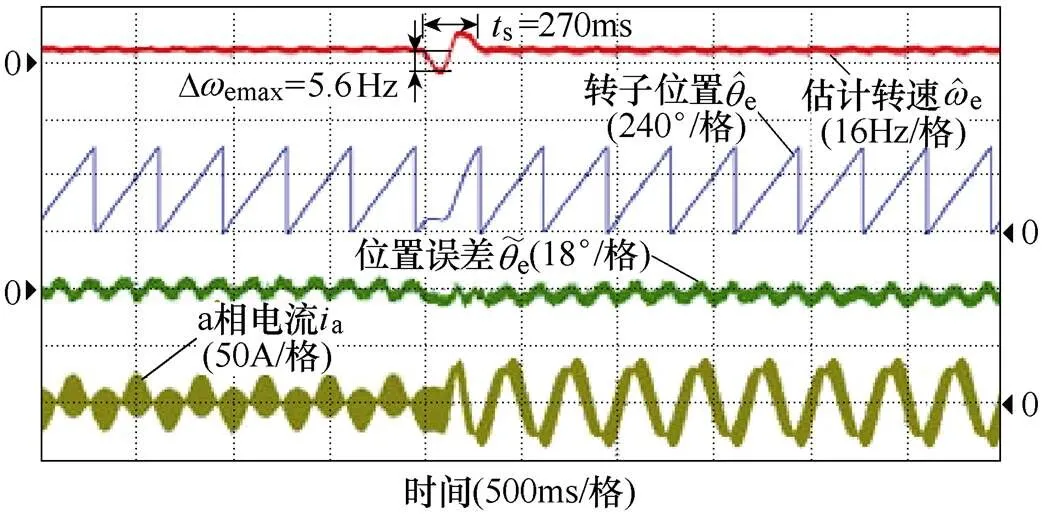
圖13 改進(jìn)LADRC實(shí)驗(yàn)結(jié)果
圖14和圖15分別為零速運(yùn)行條件下,速度環(huán)采用傳統(tǒng)LADRC和改進(jìn)LADRC調(diào)節(jié)器時(shí)無(wú)位置傳感器控制實(shí)驗(yàn)結(jié)果。實(shí)驗(yàn)過程中轉(zhuǎn)速參考值為零,對(duì)轉(zhuǎn)子位置未施加控制,因此加載前后轉(zhuǎn)子位置隨機(jī)分布。可以看出,在突加額定負(fù)載擾動(dòng)時(shí),電機(jī)可以在零轉(zhuǎn)速條件下保持無(wú)位置傳感器穩(wěn)定運(yùn)行。與傳統(tǒng)LADRC相比,改進(jìn)自抗擾調(diào)節(jié)器可以有效降低轉(zhuǎn)速跌落和恢復(fù)時(shí)間,驗(yàn)證了該方法的有效性。
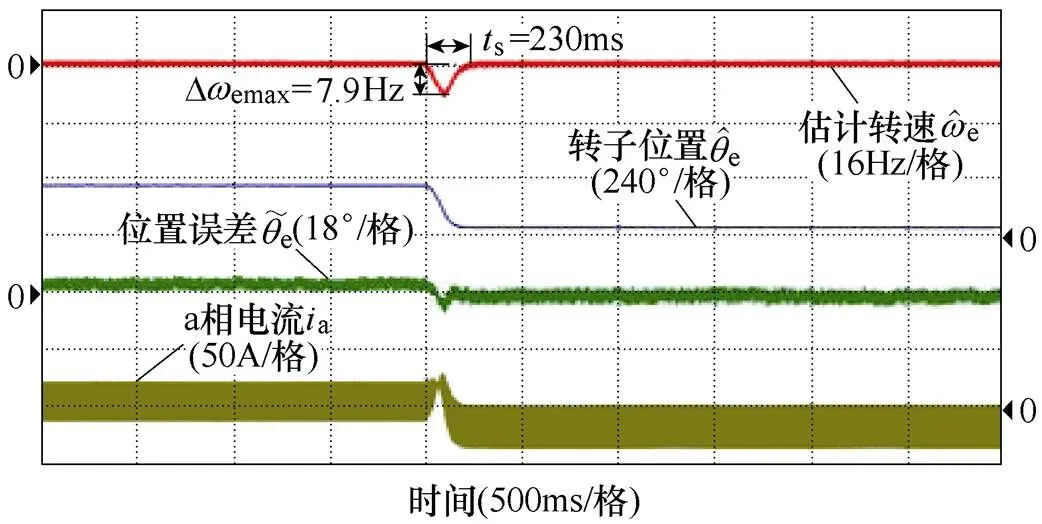
圖14 零速運(yùn)行條件下LADRC實(shí)驗(yàn)結(jié)果
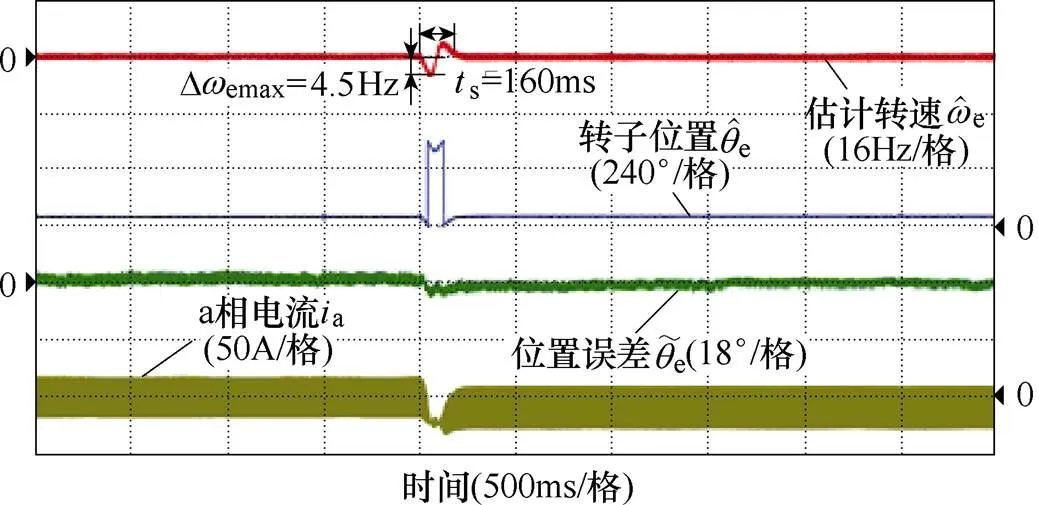
圖15 零速運(yùn)行條件下改進(jìn)LADRC實(shí)驗(yàn)結(jié)果
為進(jìn)一步驗(yàn)證所研究方法的有效性,圖16和圖17分別為電機(jī)給定運(yùn)行頻率在4~10Hz范圍內(nèi),突加25%~100%額定負(fù)載時(shí),速度環(huán)采用PI控制器、傳統(tǒng)LADRC和改進(jìn)LADRC時(shí)的最大轉(zhuǎn)速跌落和恢復(fù)時(shí)間對(duì)比。從圖16a和圖17a中可以看出,轉(zhuǎn)速跌落與恢復(fù)時(shí)間隨著給定頻率的降低而增大,故系統(tǒng)剛度隨著給定頻率的降低而降低。因此,如何提高永磁電機(jī)在低速運(yùn)行條件下的剛度尤為重要。根據(jù)圖16和圖17a~圖17c的對(duì)比可知,在4Hz運(yùn)行頻率、100%額定負(fù)載擾動(dòng)條件下,相比于PI控制器,改進(jìn)線性自抗擾控制器在受到擾動(dòng)時(shí),轉(zhuǎn)速跌落減小了66.7%。相同運(yùn)行條件下,相較于PI控制器和傳統(tǒng)LADRC控制器,采用改進(jìn)線性自抗擾控制器后,系統(tǒng)恢復(fù)時(shí)間分別降低了70%和51%。因此,改進(jìn)自抗擾控制器可以有效抑制轉(zhuǎn)速跌落和恢復(fù)時(shí)間,提高系統(tǒng)剛度。此外,根據(jù)實(shí)驗(yàn)對(duì)比可知,當(dāng)使用改進(jìn)LADRC時(shí),給定轉(zhuǎn)速越低、突加負(fù)載越大,系統(tǒng)超調(diào)越明顯,轉(zhuǎn)速恢復(fù)至給定的時(shí)間也就越長(zhǎng),但效果均優(yōu)于PI控制器和傳統(tǒng)LADRC控制器。因此,改進(jìn)線性自抗擾控制器可以有效地改善永磁電機(jī)在零、低速條件下無(wú)傳感器運(yùn)行的動(dòng)態(tài)性能。
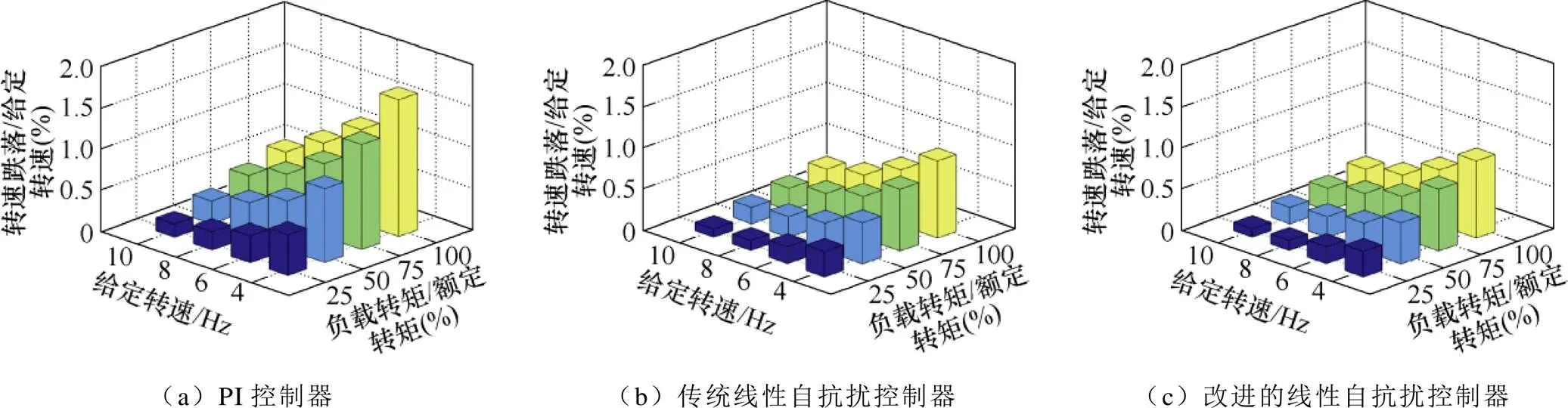
圖16 最大轉(zhuǎn)速跌落的實(shí)驗(yàn)對(duì)比
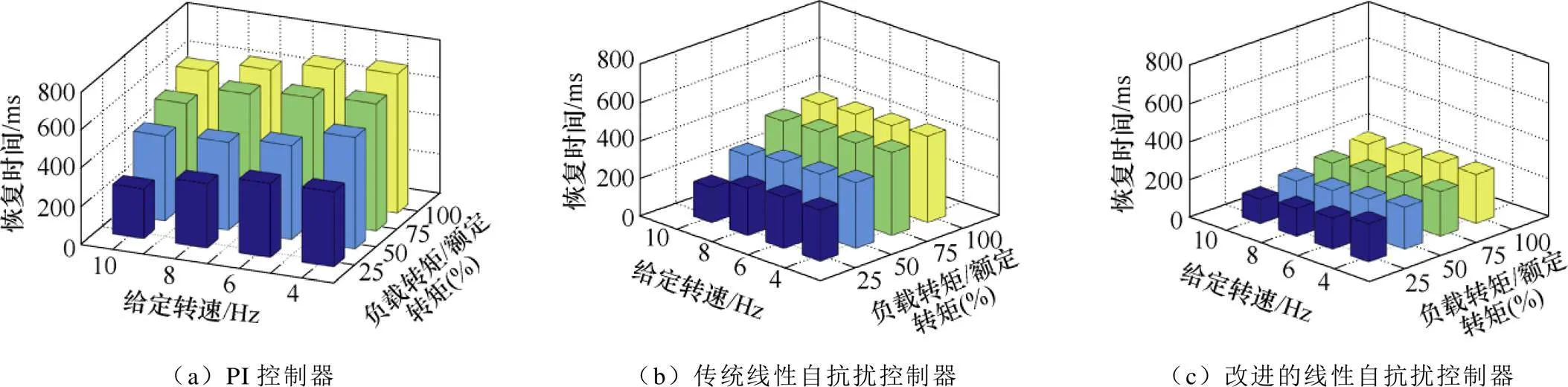
圖17 恢復(fù)時(shí)間的實(shí)驗(yàn)對(duì)比
4 結(jié)論
本文通過高頻脈沖電壓信號(hào)注入法實(shí)現(xiàn)永磁電機(jī)在零/低速條件下的無(wú)位置傳感器運(yùn)行,并提出了一種基于級(jí)聯(lián)擴(kuò)張狀態(tài)觀測(cè)器的線性自抗擾控制策略。利用級(jí)聯(lián)的ESO對(duì)系統(tǒng)所受的集總擾動(dòng)進(jìn)行觀測(cè)與補(bǔ)償,消除了傳統(tǒng)LESO對(duì)斜坡擾動(dòng)的估計(jì)誤差,提高了估計(jì)速度,改善了系統(tǒng)動(dòng)態(tài)性能,增強(qiáng)了系統(tǒng)魯棒性。實(shí)驗(yàn)結(jié)果表明,當(dāng)電機(jī)穩(wěn)定運(yùn)行于零/低速給定頻率且受到額定負(fù)載擾動(dòng)時(shí),相較于PI控制器,采用改進(jìn)線性自抗擾控制器后,電機(jī)最大轉(zhuǎn)速跌落和恢復(fù)時(shí)間分別減小66.7%和70%,有效提高了系統(tǒng)的抗擾性能。
[1] Wang Zihui, Cao Zewei, He Zhiyuan. Improved fast method of initial rotor position estimation for interior permanent magnet synchronous motor by symmetric pulse voltage injection[J]. IEEE Access, 8: 59998- 60007.
[2] Chen Zhe, Zhang Hang, Tu Wencong, et al. Sensor- less control for permanent magnet synchronous motor in rail transit application using segmented syn- chronous modulation[J]. IEEE Access, 2019, 7: 76669- 76679.
[3] Verrelli C M, Bifaretti S, Carfagna E, et al. Speed sensor fault tolerant PMSM machines: from position- sensorless to sensorless control[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 3946-3954.
[4] 李垣江, 董鑫, 魏海峰, 等. 表貼式永磁同步電機(jī)轉(zhuǎn)速環(huán)復(fù)合PI無(wú)位置傳感器控制[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(10): 2119-2129.
Li Yuanjiang, Dong Xin, Wei Haifeng, et al. Sensor- less compound PI control for surface permanent magnet synchronous motor speed regulation system[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2119-2129.
[5] Wang Yaoqiang, Feng Yutao, Zhang Xiaoguang, et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 4117-4126.
[6] 何延昭, 王貞艷, 王金霞, 等. 高速永磁同步電機(jī)模型參考自適應(yīng)轉(zhuǎn)速觀測(cè)[J]. 電氣傳動(dòng), 2020, 50(10): 16-22.
He Yanzhao, Wang Zhenyan, Wang Jinxia, et al. Speed observation for high-speed permanent magnet synchronous motor with model reference adaptive system[J]. Electric Drive, 2020, 50(10): 16-22.
[7] 趙亞輝, 馮明, 李衛(wèi)文. 基于SMO的改進(jìn)型轉(zhuǎn)子位置檢測(cè)方法[J]. 北京航空航天大學(xué)學(xué)報(bào), 2020, 46(12): 2329-2338.
Zhao Yahui, Feng Ming, Li Weiwen. Improved rotor position detection method based on SMO[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2329-2338.
[8] Ni Ronggang, Xu Dianguo, Blaabjerg F, et al. Square-wave voltage injection algorithm for PMSM position sensorless control with high robustness to voltage errors[J]. IEEE Transactions on Power Electronics, 2017, 32(7): 5425-5437.
[9] 王爽, 曹棟逸, 楊影, 等. 正負(fù)高頻脈沖電壓注入的永磁同步電機(jī)無(wú)位置傳感器控制[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(增刊1): 164-171.
Wang Shuang, Cao Dongyi, Yang Ying, et al. Sensorless control of PMSM with positive and negative high frequency pulse voltage signal injection[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 164-171.
[10] 王高林, 楊榮峰, 李剛, 等. 基于高頻信號(hào)注入的IPMSM無(wú)位置傳感器控制策略[J]. 電工技術(shù)學(xué)報(bào), 2012, 27(11): 62-68.
Wang Gaolin, Yang Rongfeng, Li Gang, et al. Position sensorless control strategy of IPMSM based on high frequency signal injection[J]. Transactions of China Electrotechnical Society, 2012, 27(11): 62-68.
[11] Li Haoyuan, Zhang Xing, Yang Shuying, et al. Unified graphical model of high-frequency signal injection methods for PMSM sensorless control[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4411-4421.
[12] Wang Shuang, Yang Kang, Chen Kang. An improved position-sensorless control method at low speed for PMSM based on high-frequency signal injection into a rotating reference frame[J]. IEEE Access, 7: 86510- 86521.
[13] 杜博超, 崔淑梅, 宋立偉, 等. 一種基于變頻電流信號(hào)的IPMSM無(wú)位置傳感器高頻注入電流噪聲抑制方法[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(18): 3830-3837.
Du Bochao, Cui Shumei, Song Liwei, et al. A variable frequency current injection sensorless control strategy of IPMSM for audible noise reduction[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(18): 3830-3837.
[14] Wang Gaolin, Valla M, Solsona J. Position sensorless permanent magnet synchronous machine drives-a review[J]. IEEE Transactions on Industrial Elec- tronics, 2020, 67(7): 5830-5842.
[15] 趙文祥, 劉桓, 陶濤, 等. 基于虛擬信號(hào)和高頻脈振信號(hào)注入的無(wú)位置傳感器內(nèi)置式永磁同步電機(jī)MTPA控制[J]. 電工技術(shù)學(xué)報(bào), 2021, 36(24): 5092- 5100.
Zhao Wenxiang, Liu Huan, Tao Tao, et al. MTPA control of sensorless IPMSM based on virtual signal and high-frequency pulsating signal injection[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5092-5100.
[16] 闕鴻杰, 全力, 張麗, 等. 基于自適應(yīng)濾波器在線解耦的磁場(chǎng)增強(qiáng)型永磁電機(jī)無(wú)位置傳感器控制[J].電工技術(shù)學(xué)報(bào), 2022, 37(2): 344-354.
Que Hongjie, Quan Li, Zhang Li, et al. Sensorless control of flux-intensifying permanent magnet syn- chronous motor based on adaptive notch filter online decoupling[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 344-354.
[17] 麥志勤, 劉計(jì)龍, 肖飛, 等. 基于估計(jì)位置反饋電流解調(diào)算法的改進(jìn)型高頻旋轉(zhuǎn)電壓注入無(wú)位置傳感器控制策略[J]. 電工技術(shù)學(xué)報(bào), 2022, 37(4): 870- 881, 891.
Mai Zhiqin, Liu Jilong, Xiao Fei, et al. Sensorless control strategy of improved HF rotating voltage injection based on estimated position feedback current demodulation algorithm[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 870-881, 891.
[18] 麥志勤, 肖飛, 劉計(jì)龍, 等. 基于改進(jìn)型自調(diào)整軸系幅值收斂電流解調(diào)算法的旋轉(zhuǎn)高頻電壓注入法[J]. 電工技術(shù)學(xué)報(bào), 2021, 36(10): 2049-2060.
Mai Zhiqin, Xiao Fei, Liu Jilong, et al. Rotating high- frequency voltage injection method based on improved self-adjusting frame amplitude convergence current demodulation algorithm[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2049- 2060.
[19] 于安博, 劉利, 闞志忠, 等. 高頻脈振信號(hào)注入永磁同步電機(jī)無(wú)濾波器初始位置辨識(shí)方法[J]. 電工技術(shù)學(xué)報(bào), 2021, 36(4): 801-809.
Yu Anbo, Liu Li, Kan Zhizhong, et al. Initial position identification of PMSM with filterless high frequency pulse signal injection method[J]. Transactions of China Electrotechnical Society, 2021, 36(4): 801-809.
[20] Zhang Guoqiang, Xiang Runhua, Wang Gaolin, et al. Hybrid pseudorandom signal injection for position sensorless synrm drives with acoustic noise redu- ction[J]. IEEE Transaction on Transport Electrific, 2022, 8(1): 1313-1325.
[21] 朱進(jìn)權(quán), 葛瓊璇, 孫鵬琨, 等. 基于自抗擾的高速磁浮列車牽引控制策略[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(5): 1065-1074.
Zhu Jinquan, Ge Qiongxuan, Sun Pengkun, et al. Traction-system research of high-speed maglev based on active disturbance rejection control[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(5): 1065-1074.
[22] 吳春, 傅子俊, 孫明軒, 等. 基于擴(kuò)張狀態(tài)觀測(cè)器負(fù)載轉(zhuǎn)矩補(bǔ)償?shù)挠来磐诫姍C(jī)全速范圍無(wú)位置傳感器控制[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(增刊1): 172- 181.
Wu Chun, Fu Zijun, Sun Mingxuan, et al. Sensorless control of PMSM in all speed range based on extended state observer for load toque com- pensation[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 172-181.
[23] Luan Tianrui, Yang Ming, Lang Xiaoyu, et al. A novel active disturbance rejection control speed controller for PMSM drive[C]//2016 IEEE 8th International Power Electronics and Motion Control Conference, Hefei, China, 2016: 116-120.
[24] 左月飛, 符慧, 劉闖, 等. 考慮轉(zhuǎn)速濾波的永磁同步電動(dòng)機(jī)轉(zhuǎn)速伺服系統(tǒng)改進(jìn)型自抗擾控制器[J]. 電工技術(shù)學(xué)報(bào), 2016, 31(9): 137-145.
Zuo Yuefei, Fu Hui, Liu Chuang, et al. A modified active disturbance rejection controller concerning speed filter for PMSM speed servo system[J]. Transactions of China Electrotechnical Society, 2016, 31(9): 137-145.
[25] Wang Gaolin, Liu Ran, Zhao Nannan, et al. Enhanced linear ADRC strategy for HF pulse voltage signal injection-based sensorless IPMSM drives[J]. IEEE Transactions on Power Electronics, 2019, 34(1): 514-525.
[26] 左月飛, 張捷, 劉闖, 等. 針對(duì)時(shí)變輸入的永磁同步電機(jī)改進(jìn)型自抗擾控制器[J]. 電工技術(shù)學(xué)報(bào), 2017, 32(2): 161-170.
Zuo Yuefei, Zhang Jie, Liu Chuang, et al. A modified adaptive disturbance rejection controller for per- manent magnetic synchronous motor speed-regulation system with time-varying input[J]. Transactions of China Electrotechnical Society, 2017, 32(2): 161-170.
[27] 蓋江濤, 黃慶, 黃守道, 等. 基于模型補(bǔ)償?shù)挠来磐诫姍C(jī)自抗擾控制[J]. 浙江大學(xué)學(xué)報(bào)(工學(xué)版), 2014, 48(4): 581-588.
Gai Jiangtao, Huang Qing, Huang Shoudao, et al. Active-disturbance rejection controller for permanent magnet synchronous motor based on model com- pensation[J]. Journal of Zhejiang University (Engineering Science), 2014, 48(4): 581-588.
[28] Du Bochao, Wu Shaopeng, Han Shouliang, et al. Application of linear active disturbance rejection controller for sensorless control of internal permanent- magnet synchronous motor[J]. IEEE Transactions on Industrial Electronics, 2016, 63(5): 3019-3027.
[29] Jiang Feng, Yang Kai, Sun Songjun, et al. An improved extended state observer based on linear- nonlinear switching strategy for PMSM sensorless control[C]//2018 IEEE 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea (South), 2018: 1696-1702.
[30] Wang Gaolin, Xiao Dianxun, Zhao Nannan, et al. Low-frequency pulse voltage injection scheme-based sensorless control of IPMSM drives for audible noise reduction[J]. IEEE Transactions on Industrial Elec- tronics, 2017, 64(11): 8415-8426.
Active Disturbance Rejection Control for Position Sensorless Permanent Magnet Synchronous Motor Drives Based on Cascade Extended State Observer
1,21111
(1. School of Electrical Engineering and Automation Harbin Institute of Technology Harbin 150001 China 2. GD Midea AIR-Conditioning Equipment Co. Ltd Foshan 528311 China)
In order to solve the problem that the installation of the position sensor decreases reliability and impairs anti-disturbance ability in permanent magnet synchronous motor (PMSM) drives, the high frequency pulse voltage signal injection method is adopted to realize PMSM sensorless drives at zero and low speed. When the traditional control method is used in PMSM sensorless drives, the stiffness of the drive system will be decreased. Therefore, this paper proposes an improved linear active disturbance rejection control (LADRC) strategy. A cascade of extended state observer (ESO) is used to estimate the total disturbance imposed on the system. The estimation error for the slope load disturbance can be eliminated, which improves the estimation precision against disturbance and enhances the robustness of the system. Finally, the feasibility of the proposed strategy is verified by the experimental results on a 7.5kW PMSM platform.
Permanent magnet synchronous motor, sensorless, active disturbance rejection control, cascade extended state observer
10.19595/j.cnki.1000-6753.tces.210615
TM346
國(guó)家自然科學(xué)基金資助項(xiàng)目(52177034, 52125701)。
2021-05-05
2021-09-14
朱良紅 男,1977年生,碩士研究生,教授級(jí)高工,研究方向?yàn)榭照{(diào)永磁壓縮機(jī)小電容驅(qū)動(dòng)系統(tǒng)關(guān)鍵控制技術(shù)。E-mail: zhulh@midea.com
張國(guó)強(qiáng) 男,1987年生,博士,副教授,研究方向?yàn)榻涣麟姍C(jī)控制理論與應(yīng)用技術(shù)。E-mail: ZhGQ@hit.edu.cn(通信作者)
(編輯 崔文靜)
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36