永磁直線電機驅動單連桿柔性臂系統的試驗模型辨識*
2022-09-29 09:18:54黃旭升顏建虎應展烽
電機與控制應用 2022年9期
黃旭升, 顏建虎, 應展烽
(1.南京理工大學 自動化學院,江蘇 南京 210094;2.南京理工大學 能源與動力工程學院,江蘇 南京 210094)
0 引 言
隨著工業生產、航天航空、醫療手術、救災探測、生活護理等領域對高性能與高適應性運動控制需求的提升,具有高柔順性、復雜環境適應性、高運行效率的柔性機械臂剛柔耦合動力系統受到國內外研究機構的廣泛關注。目前,該系統通常采用旋轉電機作為驅動電機,或采用滾珠絲杠等傳動裝置實現直線運動[1]。然而隨著永磁電機技術的發展和突破,在直線運動場合,永磁直線電機(PMLM)已逐步替代傳統永磁旋轉電機。與傳統的永磁旋轉電機相比,PMLM具有高推力密度和高效率,且無需滾珠絲杠等中間傳動裝置,可以有效提升控制精度和響應時間[2-4]。因此,基于PMLM的柔性機械臂伺服驅動系統具有較好的應用前景。然而,柔性機械臂具有阻尼小的結構特點,導致其在PMLM上做直線運動時極易產生形變和較大振幅的彈性振動,尤其是在做點到點運動時,運動停止后振動仍會持續一段時間,從而影響了末端的迅速精準定位和驅動的操作效率,還會使柔性臂產生疲勞損傷,影響整個系統的操作精度和使用壽命[5-6]。因此,對平動柔性臂系統的驅動和振動抑制研究成為當前的研究熱點。
柔性機械臂驅動的實質是系統剛體大位移和彈性小變形之間的非線性耦合疊加,具有剛柔耦合特性。由于理論建模法中往往含有一些假設和簡化條件,基于系統實際輸入輸出數據的試驗辨識建模法更容易描述系統的動力學行為,因此從試驗模型辨識的角度研究柔性臂運動過程中的動力學特性是實現柔性臂驅動系統高精度平穩運行和振動抑制的基礎。
目前柔性臂系統的模型辨識可分為2類場景。第一類場景是柔性臂相對于大地處于靜止狀態,屬于靜止的懸臂梁,只有彈性振動,沒有剛體運動。Jalil等[7]對有限微分模型進行施加載荷并記錄輸出的仿真試驗,并運用人工神經網絡進行系統辨識。婁軍強等[8-10]分別采用對壓電制動器注入控制電壓信號引起柔性臂振動的方法對柔性臂系統做系統辨識,建立輸入控制電壓和柔性臂振動傳感器振動信號之間的傳遞函數,并用壓電制動器做主動抑振控制。然而,壓電控制系統的加入意味著在電機控制系統的基礎上附加了另一套控制系統,增加了整個柔性臂系統的控制成本,不僅控制系統復雜,還會帶來控制溢出甚至控制系統不穩定等風險。因此,設計簡單、可靠的控制算法,僅利用電機的合理驅動方法來實現柔性臂的平穩控制及振動抑制很有必要。第二類場景是柔性臂相對于大地處于運動狀態,屬于運動的懸臂梁,剛體運動和彈性振動同時存在且相互耦合。賈振等[11]對單連桿柔性機械臂做等效到末端的集中質量法建立的小變形動力學方程,建立旋轉直流電機驅動器的輸入控制電壓和柔性臂根部的應變片輸出振動信號電壓的傳遞函數,使用電機對旋轉柔性臂系統進行模型辨識。王林源[12]將驅動電壓輸入給直線電機驅動器制造電機推力,得到柔性梁上應變傳感器的振動信號輸出,運用最小二乘法對已建立的系統動力學方程進行辨識。該直線電機柔性臂系統平臺還增加了磁流可控阻尼器抑制柔性臂振動,與上述提到的壓電制動器一樣屬于附加的控制系統。在建立其動力學方程時需要考慮該阻尼器對系統的影響,從而導致系統模型復雜。Yatim等[13-15]分別對旋轉柔性臂系統的偏微分方程離散化,對帶額外輸入的自回歸系統(ARX)模型輸入Bang-Bang力矩后得到的輸出結果與理論模型的前三階頻率作比較,比較分析了傳統最小二乘法、遺傳算法、粒子群算法和帶搜索器的粒子群算法在模型辨識上的優劣。Hizarci等[16]通過對旋轉直流電機驅動器的輸入控制電壓和柔性臂彎曲傳感器振動信號進行系統傳遞函數辨識。文獻[17-18]用通用運動和自動化控制器(UMAC)驅動帶單連桿柔性臂的直線電機系統,輸入掃頻位移控制信號,得到用于測量柔性臂位移的激光雷達和相機的輸出信號與理論模型仿真結果有較好的吻合度。然而,該集成系統成本很高,而且激光測距設備和攝像頭在有些場合安裝測量不方便,如沒有足夠的視角則無法完整觀察柔性臂的整個運動范圍,而且出現遮擋或高濕度環境還會造成無法獲取振動信號等嚴重問題。因此,低成本高可靠性的粘貼式振動傳感器如壓電片、應變片等適合電機驅動柔性臂運動和振動抑制的場合。
針對上述問題,本文基于PMLM的伺服控制系統,推導動子位移和應變傳感器振動信號之間的傳遞函數,利用給定位置指令做階躍輸入和掃頻激勵輸入辨識得到等效模型,將同樣的位置指令輸入等效模型得到的仿真結果和試驗結果作比較,驗證該系統辨識方法的有效性。
1 PMLM伺服驅動模型
1.1 PMLM的數學模型
理想情況下,PMLM的電磁推力為

(1)
式中:τ為極距;λPM為永磁勵磁磁鏈;Ld、Lq為d-q軸電感;id、iq為d-q軸電流。
本文選用的電機為表貼式PMLM,因此Ld=Lq,即:
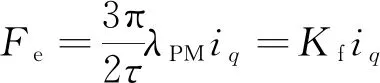
(2)
式中:Kf為推力系數。
PMLM運動方程為

(3)
式中:M為動子及所帶柔性臂前端裝配部分的總質量;y(t)為動子位移;B為黏滯摩擦系數;Ffriction為摩擦力;Fripple為推力波動;Fd為負載擾動主要包括系統模型不確定性、電機動子質量變化及測量擾動等非線性因素引起的隨機擾動。
直線電機動子位置y(t)和電磁推力Fe之間的傳遞函數為

(4)
1.2 PMLM的控制器設計
為了獲得PMLM高性能伺服控制,通常采用三閉環矢量控制方法對PMLM進行解耦控制。圖1給出了典型的PMLM三閉環矢量伺服控制框圖。其中外環為位置環,中環為速度環,內環為電流環,三環均采用經典的PID控制方案。
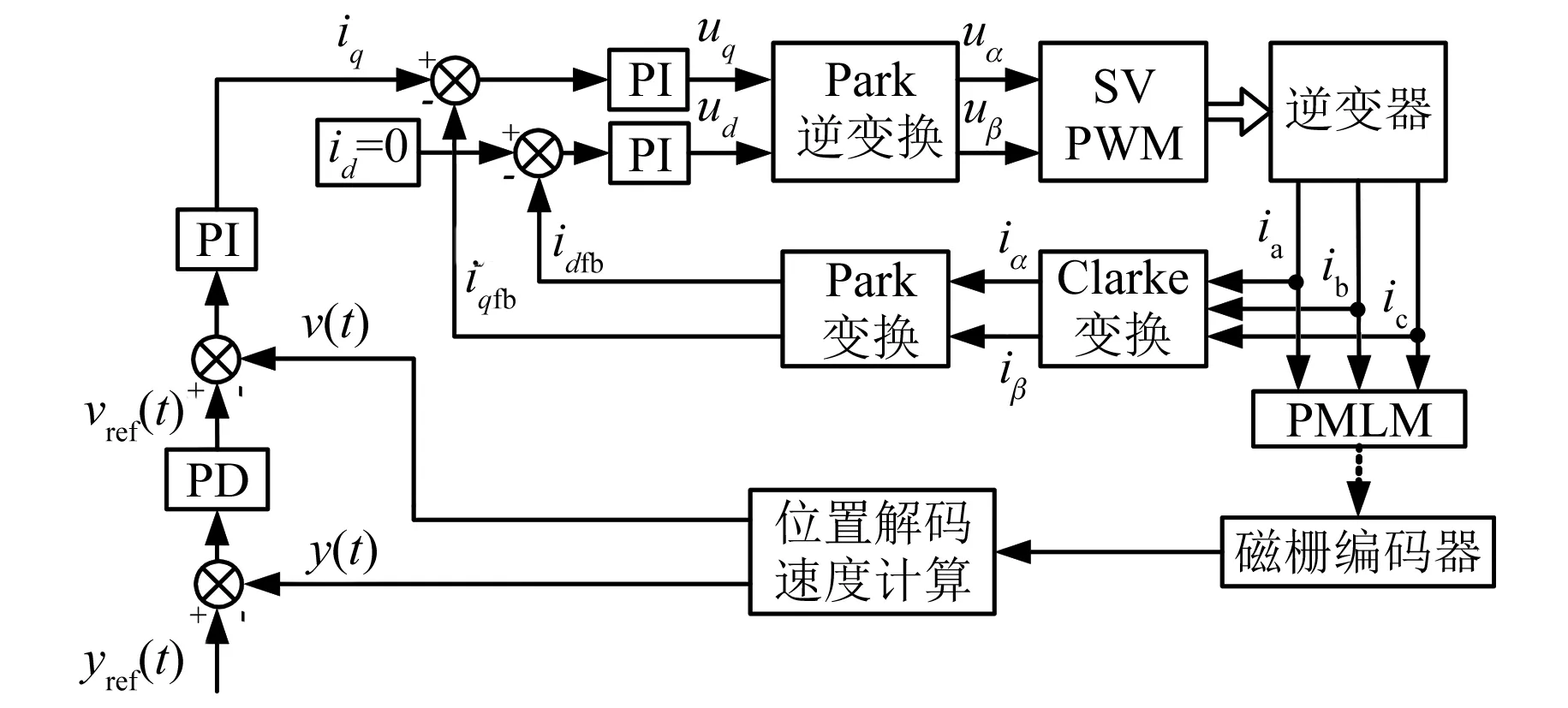
圖1 PMLM伺服控制系統
作為一個伺服控制系統,其輸入位置指令和磁柵編碼器位置輸出之間存在著一個等效傳遞函數,可以將其結合后面的柔性臂系統傳遞函數,通過系統辨識的方法得到等效模型。
2 柔性機械臂系統動力學模型
圖2(a)給出了基于PMLM的平動柔性機械臂系統示意圖。其中PMLM為動初級結構,即定子為永磁次級,動子為電樞初級。其剛柔耦合動力等效物理模型如圖2(b)所示,整個系統處于固定全局坐標系XOY中,動子及柔性臂沿Y方向做直線運動,柔性臂通過裝置固定在PMLM動子上,其根部關聯隨動坐標系xoy,y與Y重合;m為末端負載質量;w(l,t)為柔性臂末端在隨動坐標系下的撓度;p(l,t)為末端在全局坐標系下的位移,即有p(l,t) =y(t)+w(l,t);柔性臂的體密度、彈性模量、厚度、高度、長度和截面慣性矩分別用ρ、E、b、h、l、I表示。
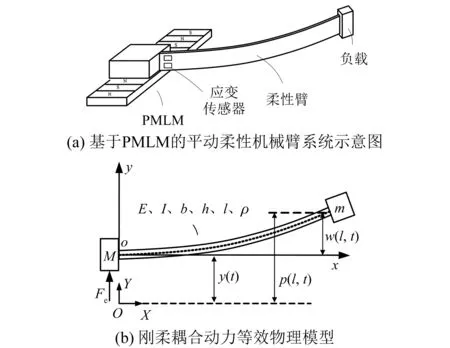
圖2 平動柔性臂系統及其等效物理模型示意圖
在PMLM驅動柔性臂做直線運動的過程中,柔性臂的彈性振動對電機動子具有耦合反力Fcoup的作用。因此,式(3)應改為

(5)
不考慮重力影響,狹長矩形等截面勻質柔性機械臂在其長度遠大于截面寬度的情況下可看作歐拉-伯努利梁模型。由于柔性臂的彈性振動以一階模態振動為主,且在小變形條件下,可以采用分布模型中的集中質量法來近似描述柔性臂末端的振動響應[11]。在耦合反力作用下,柔性臂振動的動力學模型可表述為

(6)
式中:meq為柔性臂等效到其末端的集中質量,其值為104×ρbhl/405;ξ為柔性臂等效結構阻尼。
柔性臂末端等效質量的移動位移為
p(l,t)=y(t)-w(l,t)
(7)
根據梁的彎曲變形理論,耦合力可以表述為
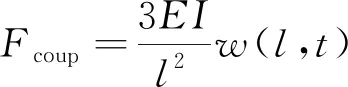
(8)
綜合式(6)~式(8)可得直線平動柔性臂系統剛柔耦合動力學模型:

(9)
經過Laplace變換后得:

(10)
結合式(8)可得:

(11)
試驗中利用粘貼在柔性臂根部的應變全橋電路檢測柔性臂的振動信息,并通過儀表放大器將應變信號ε調理為電壓信號:

(12)
式中:s0為應變片靈敏度系數;E0為全橋電路橋電壓;xs為應變傳感器位置;γ0為柔性臂的應變轉換系數;w(x,t)為柔性臂在隨動坐標系下坐標x處的撓度,當x=l時為末端的撓度。
在集中質量法和小變形假設的前提下,只考慮柔性臂的一階振動模態,其根部與末端振動位移具有近似線性關系,結合式(12)可得:

(13)
結合式(10)可得:
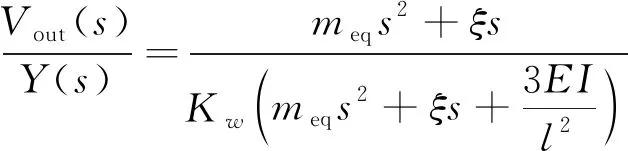
(14)
得到PMLM的位置輸出和應變傳感器輸出電壓信號之間的傳遞函數。再結合1.2節提出的PMLM伺服控制系統的等效傳遞函數,可以認為從位置指令輸入到應變檢測電路輸出電壓之間存在等效傳遞函數關系。
3 試驗平臺與系統辨識結果
3.1 試驗平臺
為了開展基于PMLM柔性臂系統動力學模型辨識、柔性臂驅動殘余振動抑制等試驗,搭建了基于PMLM驅動的柔性臂試驗平臺。試驗所用PMLM為湖南長沙一派生產的PMLM模組,其主要參數如表1所列。
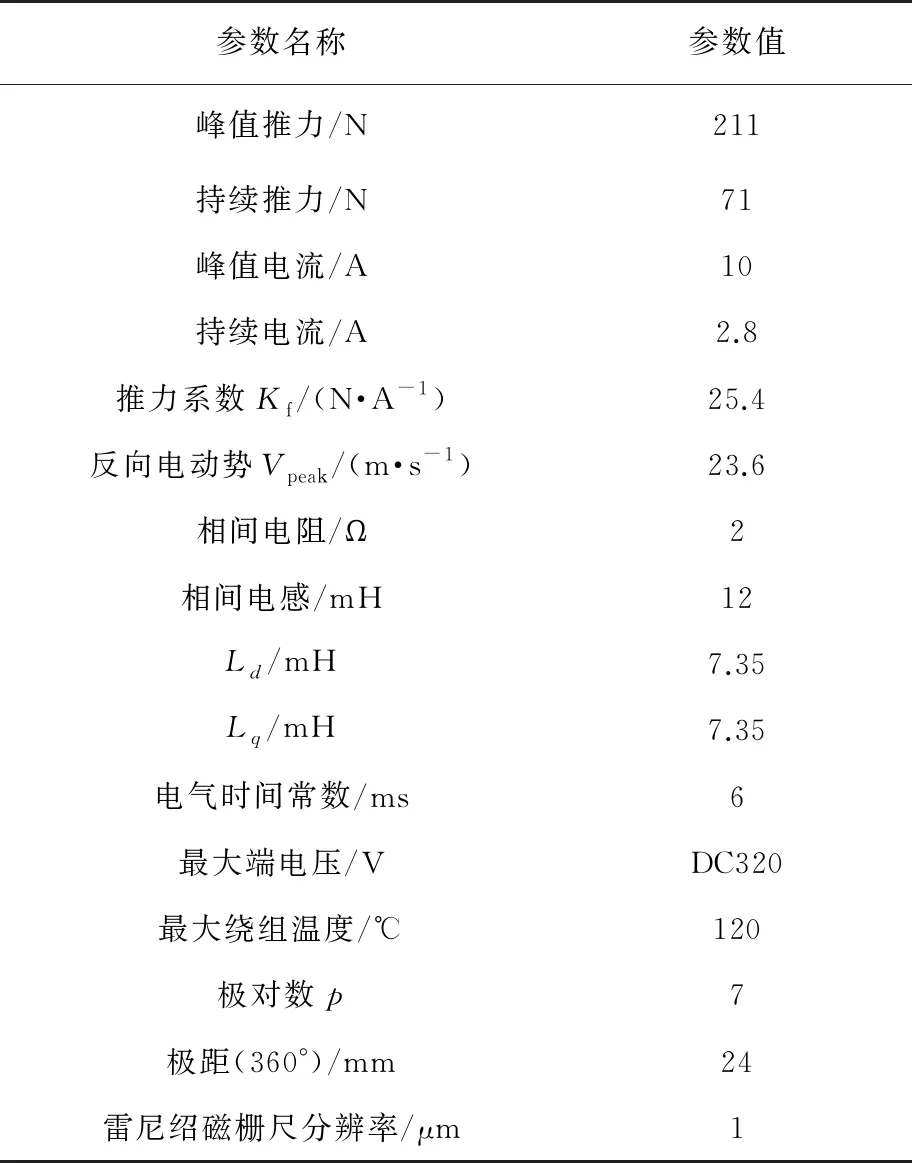
表1 PMLM模組參數表
柔性機械臂根部通過剛性結構固定在該PMLM的動子上,柔性機械臂采用環氧聚酯加工而成,其參數如表2所列。
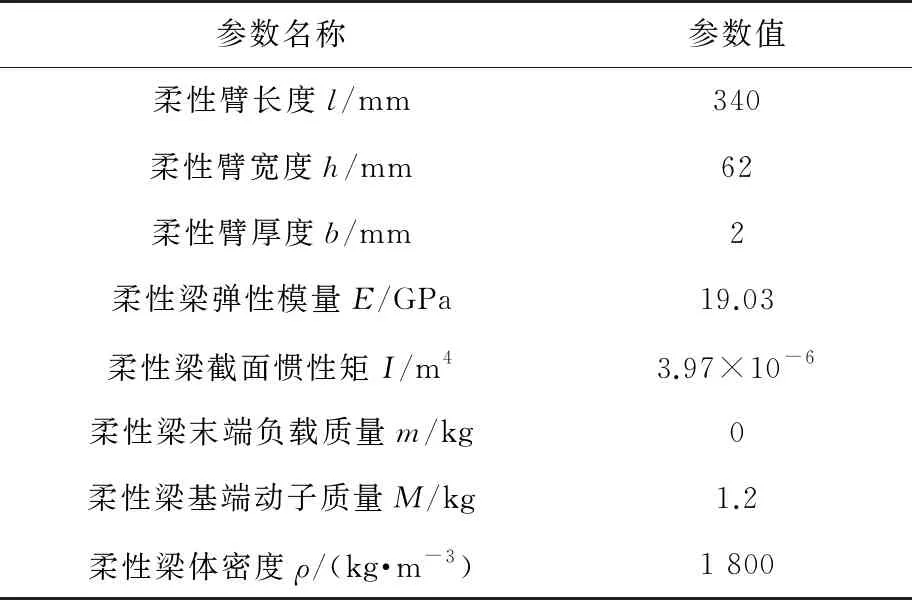
表2 動柔性臂系統參數表
該試驗平臺包括:基于TI公司DSP芯片TMS320F28062的電機驅動器、環氧聚酯單連桿柔性臂、應變片全橋電路及儀表放大器采集模塊、PMLM電機、分辨率為1 μm的雷尼紹磁柵尺位置傳感器以及測量設備,如圖3所示。
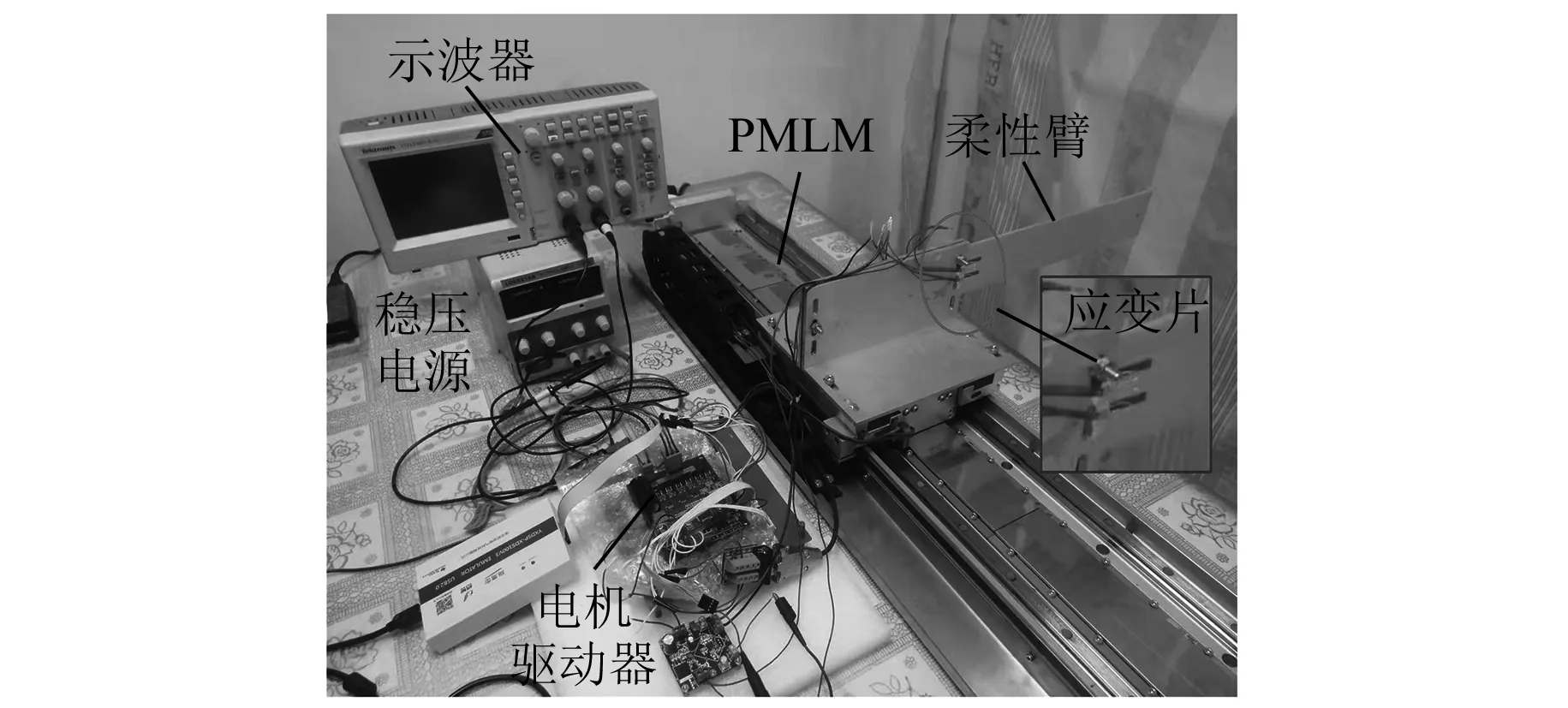
圖3 基于DSP的PMLM試驗系統試驗平臺
PMLM伺服驅動系統試驗硬件結構圖如圖4所示。主要包括:系統電源、DSP芯片、基于場效應管MOSFET的三相逆變橋、IR2812S驅動電路、相電流采樣電路、應變片全橋振動信號采集電路、正交編碼器采集電路。
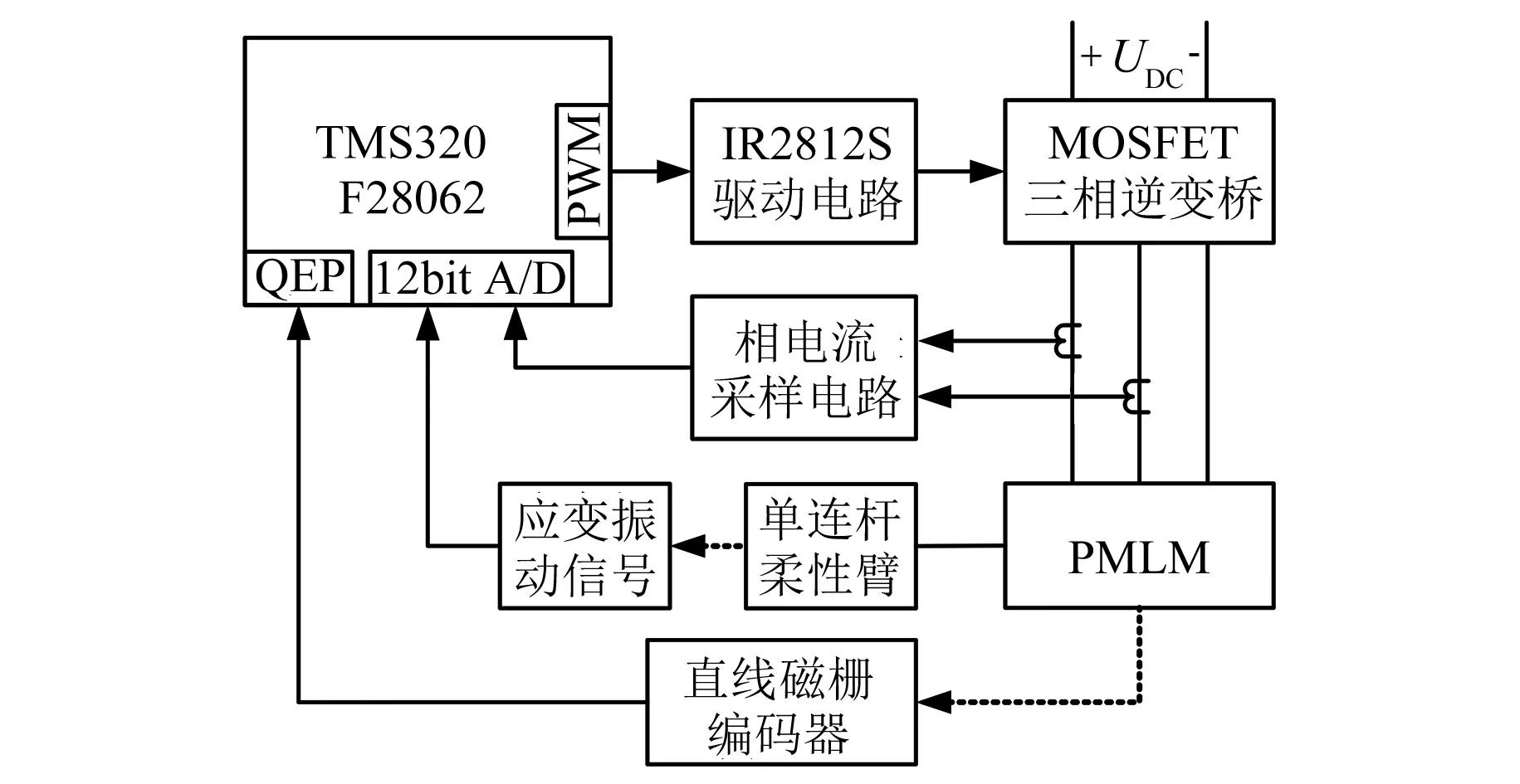
圖4 基于DSP的PMLM控制系統硬件結構圖
3.2 試驗結果
分別對伺服控制系統輸入2種位置指令信號:0.1 m階躍信號和1~3 Hz幅值為0.05 m的正弦掃頻激勵信號,得到PMLM動子的響應位移和柔性臂根部的應變檢測電路振動信號,運行時間為3.2 s,采樣時間為0.001 6 s。將輸入位移信號和振動信號轉換后的末端位移信號即末端全局坐標p(l,t)用MATLAB系統辨識工具箱進行系統辨識,得到等效模型。
其中,輸入階躍位移指令信號得到的結果如圖5所示。從圖5可以看出動子的階躍響應阻尼性能較好,不存在欠阻尼振蕩的現象。末端全局坐標能體現柔性臂小阻尼彈性振動特性及和剛體運動的耦合,柔性臂末端最終在指定位移處衰減振蕩。
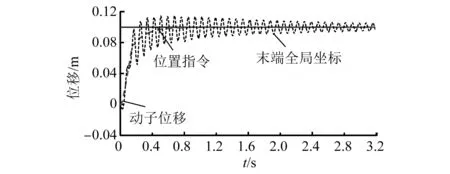
圖5 階躍輸入位置指令、動子位移和末端全局坐標的時域圖
將輸入位置指令和末端全局坐標代入MATLAB辨識工具箱,得到等效傳遞函數為
G(s)=

(15)
式中:B0~B6以及A0~A6為擬合系數。其中B6=-0.165、B5=19.6、B4=-2 519、B3=1.129×105、B2=-5.257×106、B1= 1.498×108、B0=7.963×108,A6=1、A5=37.86、A4=8 605、A3=2.556×105、A2=1.723×107、A1=2.835×108、A0=7.973×108。
將原始輸入信號輸入模型后得到的數據與實際末端全局坐標信號作對比,得到如圖6(a)所示。從圖6中可以看出,用已辨識得到的系統等效傳遞函數的仿真輸出值與試驗得到的實際值吻合度較高。圖6(b)給出了其誤差曲線,可以看出誤差大部分時間在±4 mm以內。
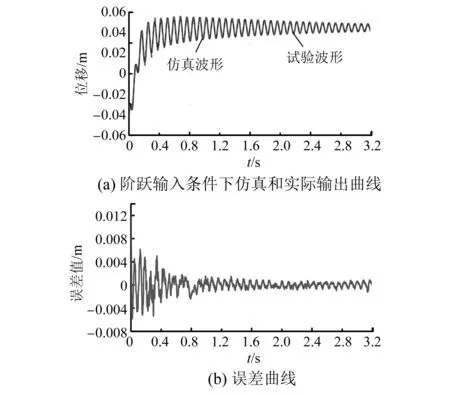
圖6 階躍輸入條件下末端全局坐標仿真和實際輸出及其誤差曲線
為了定量比對辨識模型與實際結構的近似程度,引入模型吻合度指標如下[9]:
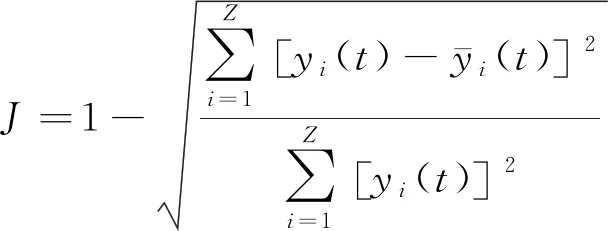
(16)

輸入1~3 Hz掃頻激勵信號得到的結果如圖7所示。從圖7中可以看出動子位移輸出的幅值隨著輸入頻率的增加而衰減,且有相移,體現了幅頻特性和相頻特性,末端全局坐標體現了柔性臂的彈性振動疊加在動子運動曲線上。
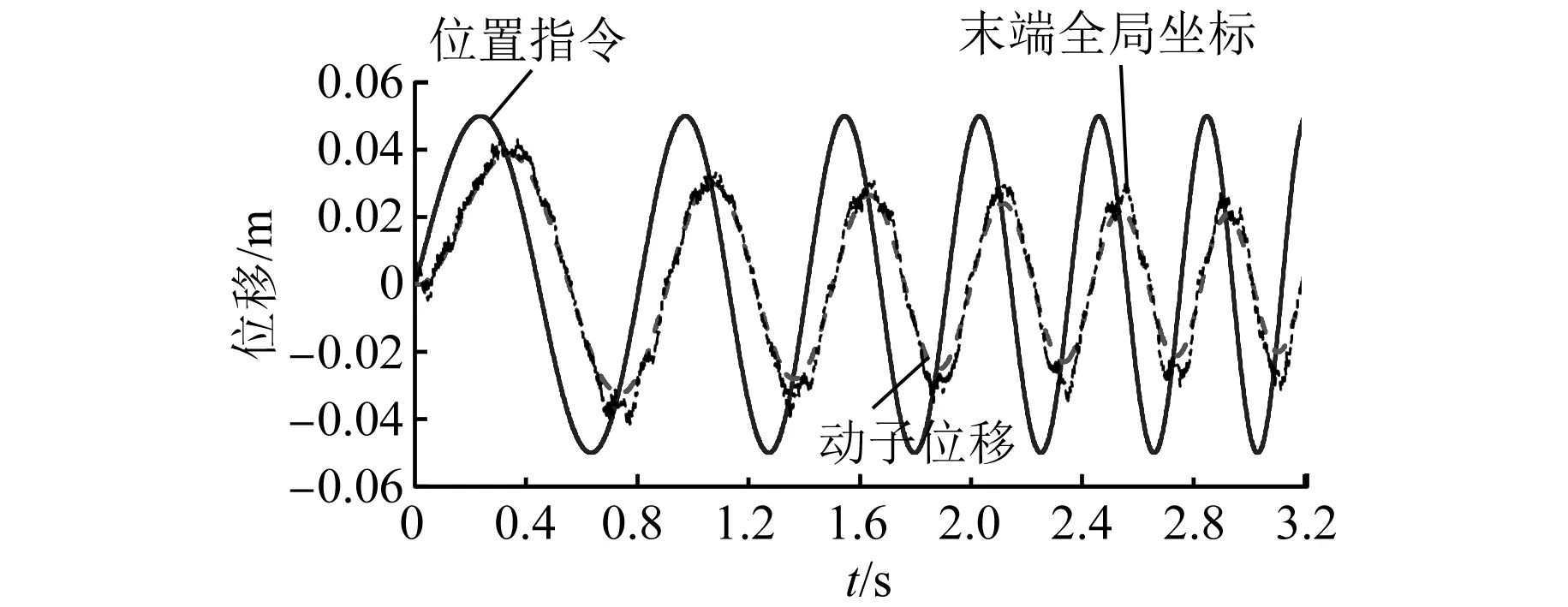
圖7 掃頻激勵輸入位置指令、動子位移和末端全局坐標的時域圖
將輸入位置指令和末端全局坐標代入MATLAB辨識工具箱,得到等效傳遞函數為
G(s)=

(17)
式中:K、B0~B6以及A0~A6為擬合系數。其中K=-0.025 6、B6=-2.77、B5=-995.6、B4=7 792、B3=-4.245×106、B2=2.544×108、B1=7.184×109、B0=3.702×109,A6=1、A5=48.27、A4=2.268×105、A3=1.746×106、A2=1.072×109、A1=7.039×109、A0=4.618×109。
將原始輸入信號輸入模型后得到的數據與實際末端全局坐標信號進行對比,得到如圖8(a)所示。從圖8(a)中可以看出,用已辨識得到的系統等效傳遞函數的仿真輸出值與試驗得到的實際值吻合度較高,運用式(16)得到吻合度為89.59%。其誤差曲線如圖8(b)所示,誤差約在±5 mm以內。
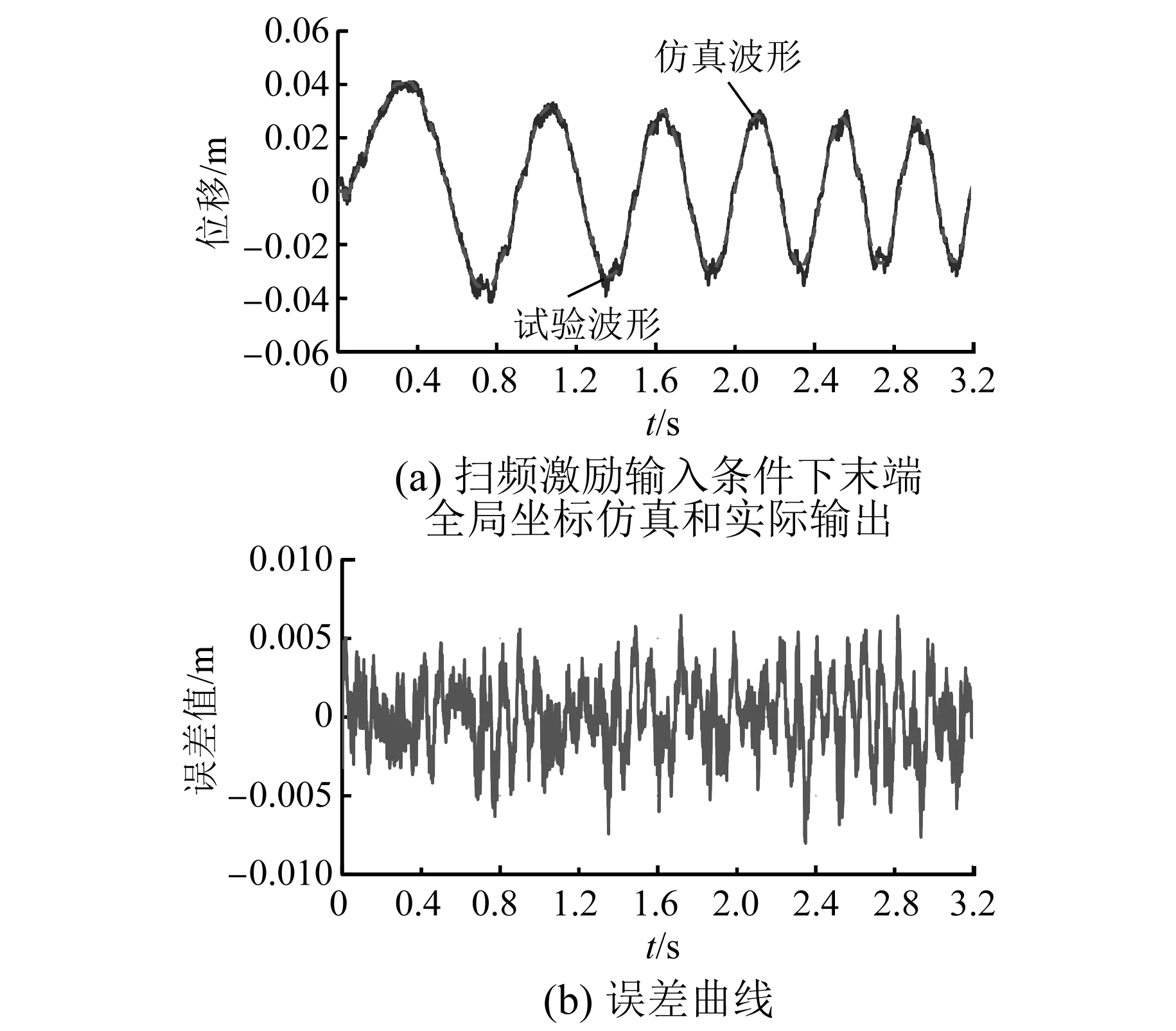
圖8 掃頻激勵輸入條件下末端全局坐標仿真和實際輸出及其誤差曲線
4 結 語
為了解決PMLM驅動SLFM做點到點運動時存在殘余振動從而影響柔性臂末端迅速精準定位的問題,本文研究了平動柔性機械臂系統的動力學建模及等效模型辨識問題,建立了從PMLM的動子位移到柔性臂根部應變振動信號的傳遞函數模型,采用階躍輸入法和掃頻激勵法進行了試驗辨識得到等效模型。試驗結果表明辨識模型的仿真輸出與實際輸出有較高的吻合程度,驗證了模型辨識結果的正確性,反映了基于PMLM的平動柔性臂系統的動力學特性,為開展基于PMLM的平動柔性臂系統抑制殘余振動控制提供了模型基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
