引入桿位移抑制濾波器的駕駛員誘發(fā)振蕩防范方法
2022-10-08 03:06:24王子健鄭通通周思羽高艷麗于向陽
海軍航空大學學報 2022年4期
王子健,鄭通通,周思羽,高艷麗,于向陽
(海軍航空大學,山東青島 266041)
飛行安全一直是航空工業(yè)關心的首要問題。對于軍用飛機而言,飛行安全更是遂行各項軍事任務的重要保證,因此,如何保證飛行器的飛行安全,減少飛行事故的發(fā)生等一系列問題一直伴隨著航空工業(yè)的發(fā)展。駕駛員誘發(fā)振蕩(Pilot Induced Oscillation,PIO)是1 種復雜的人機之間相互耦合的現(xiàn)象,它是由駕駛員因操縱引起的飛機持續(xù)的、不可控制的,嚴重影響到駕駛員飛行安全的振蕩現(xiàn)象。自世界上第1架真正的有人駕駛飛機問世以來,幾乎所有的飛機在設計和研發(fā)的過程中都會遇到PIO 問題,艦載機也不例外。艦載機在下滑著艦過程中,為了確保飛行軌跡能夠準確地追蹤上理想下滑道,駕駛員需要采取反區(qū)操縱技術并不斷調(diào)整飛行姿態(tài)和推力,來調(diào)整艦載機的下滑軌跡。整個下滑著艦過程實際上是1個人機交互頻繁的過程,如果操縱策略選擇不當或受到其他因素的影響,便極易出現(xiàn)人機交互問題——PIO。
在正常飛行過程中,艦載機的PIO 問題與陸基飛機相比并沒有較大的差異,但在下滑著艦過程中,艦載機的PIO問題卻具有一定的特殊性。艦載機在著艦過程中若發(fā)生PIO 問題,不僅會造成機毀人亡的嚴重后果,還會對航空母艦、停放在甲板上的飛機造成嚴重的破壞,對艦面人員的生命安全造成巨大的威脅。
考慮到艦載機在航空母艦上降落時易受到復雜因素的影響,以及艦載機降落對安全性的需求,本文從飛機飛行動力學缺陷和環(huán)境因素干擾2 個角度出發(fā),通過引入桿位移抑制濾波器來抑制PIO的發(fā)生,從而降低PIO對艦載機安全降落的影響。
1 人-機閉環(huán)系統(tǒng)模型建立與仿真
1.1 人-機閉環(huán)系統(tǒng)的數(shù)學模型建立
1 個完備的人-機閉環(huán)系統(tǒng)的數(shù)學模型能夠有效地顯現(xiàn)出整個真實的人-機閉環(huán)系統(tǒng)的基本性能指標,實現(xiàn)對系統(tǒng)的各項動態(tài)性能的深入測量、分析與研究,同時能讓我們對PIO 問題有更為全面深入的了解,從而有針對性地開展對PIO防范方法的研究。
駕駛員的個人行為特性很大程度上影響著整個人-機閉環(huán)系統(tǒng)特性,故可通過駕駛員模型來反映駕駛員的行為,并通過調(diào)整參數(shù)來改變?nèi)?機閉環(huán)系統(tǒng)的工作特性。常見的駕駛員模型有結構駕駛員模型、McRuer 模型、最優(yōu)控制模型(OCM)、模糊控制駕駛員模型、神經(jīng)網(wǎng)絡駕駛員模型、生物力學駕駛員模型和監(jiān)控行為駕駛員模型等。
本文采用的模型是簡化后的McRuer模型。該模型的傳遞函數(shù)為:

式(1)中:為駕駛員增益;為駕駛員反應時延;為駕駛員由于操縱預測的超前時間常數(shù);為駕駛員神經(jīng)肌肉滯后時間常數(shù)。
可以采用1個與高階系統(tǒng)的動力學特性及各項指標都較為接近的低階系統(tǒng)作為飛機系統(tǒng)的等效系統(tǒng),以建立簡化的模型;然后,利用傳統(tǒng)的分析途徑對所建立的模型進行分析,使問題得以簡便有效的解決。
艦載機PIO 問題主要發(fā)生在下滑著艦過程中,即駕駛員在操縱飛機進行俯仰追蹤任務的時候。因此,本文建立1個飛機進行俯仰追蹤任務的飛機動力學模型,同時考慮到艦載機在著艦過程中的快速機動性、追蹤過程的快速響應性等因素,故采取短周期的等效模型,其傳遞函數(shù)為:

式(2)中:為飛機的俯仰角;為縱向駕駛操縱桿力;為飛機動力學模型增益;為飛機等效短周期模態(tài)的阻尼比;ˉ為飛機等效短周期模態(tài)的無阻尼自振頻率;為飛機反應的時間延遲;為等效傳遞函數(shù)分子項的時間常數(shù)。
Neal-Smith 頻域準則是最經(jīng)典、應用范圍最廣的閉環(huán)俯仰跟蹤準則。該準則是根據(jù)駕駛員對飛機的飛行品質(zhì)提煉而成的,反映了飛機在飛行和完成任務中需要達到的基本要求以及整個系統(tǒng)的工作關系。為了便于確定人-機閉環(huán)系統(tǒng)的匹配參數(shù),利用以下數(shù)學方程式進行描述:
1.2 人-機閉環(huán)系統(tǒng)參數(shù)匹配與仿真
式(3)所列出的4個非線性方程,如果按照常規(guī)的迭代法來求解是無法直接得到結果的,因此,應首先利用任務及長期積累的經(jīng)驗給定一定參數(shù),然后再進行其他參數(shù)的匹配。我們以某型艦載機為例,選取其2 種短周期動力學特性的典型飛行狀態(tài),得到了等效的飛機動力學數(shù)學模型參數(shù),如表1所示。

表1 等效飛機動力學數(shù)學模型參數(shù)Tab.1 Equivalent aircraft dynamics mathematical model parameters
利用表1參數(shù)簡化Neal-Smith準則的方程:
取=03 s,利用迭代法求解式(4),可以得出駕駛員數(shù)學模型在滿足Neal-Smith頻域準則條件下的匹配參數(shù),如表2 所示。其中,為駕駛員操縱的補償角,正值為超前補償,負值為滯后補償。

表2 駕駛員數(shù)學模型參數(shù)Tab.2 Pilot mathematical model parameters
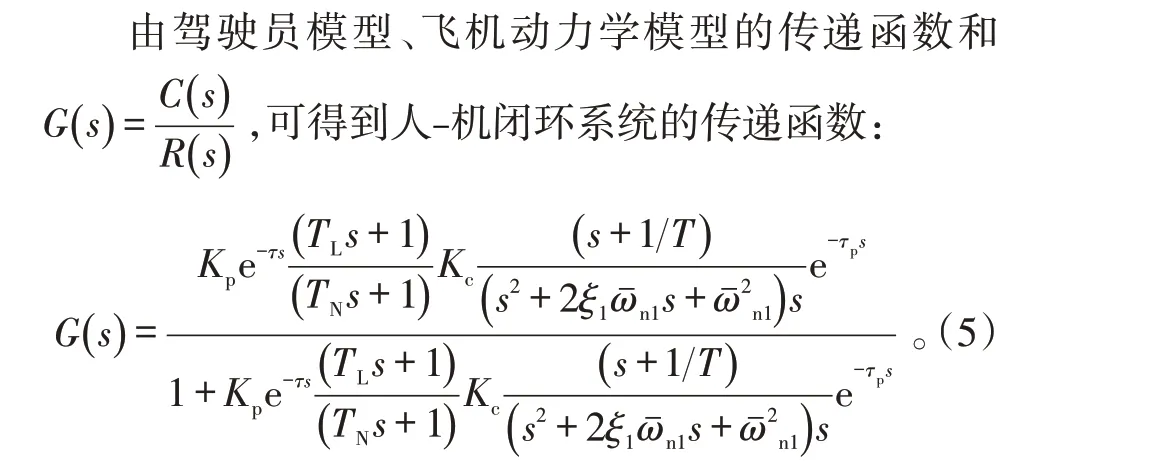
將表2 的匹配參數(shù)帶入式(5)中,利用MATLAB軟件進行仿真,得到了2 個狀態(tài)下等效系統(tǒng)的單位階躍響應與脈沖響應的時域仿真圖,如圖1、2所示。
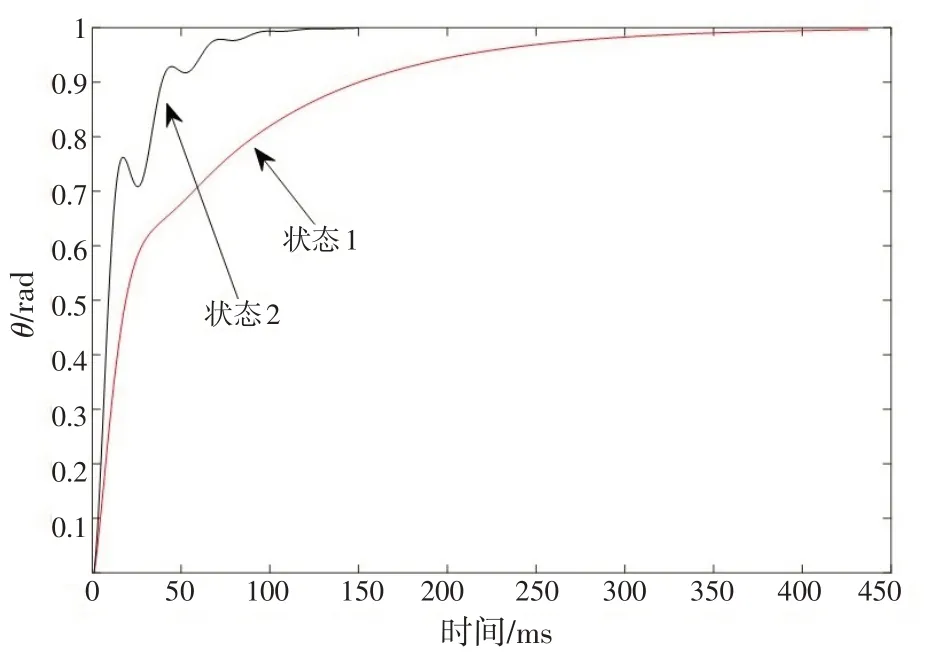
圖1 等效系統(tǒng)的單位階躍響應Fig.1 Unit step response of the equivalent system
從仿真結果可以看出,控制效果產(chǎn)生了不同程度的振蕩,因此,我們引入PIO抑制濾波器來抑制PIO問題的發(fā)生。
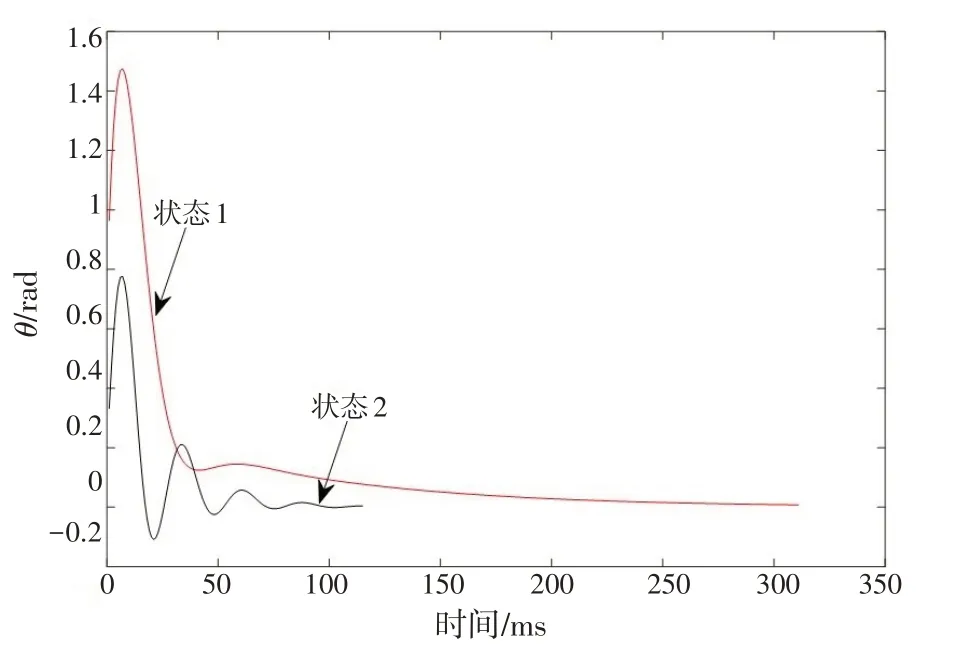
圖2 等效系統(tǒng)的單位脈沖響應Fig.2 Unit impulse response of the equivalent system
2 PIO的抑制
2.1 抑制問題概述
抑制PIO的關鍵問題是減少系統(tǒng)的延遲和避免進入飽和區(qū),也就是必須在接近PIO 頻率的時候減少駕駛員的有效輸入。為了減緩速率限制對人-機系統(tǒng)動態(tài)特性的影響,引入速率限制器前置濾波器(Rate limiter Pre-filter,RLPF),圖3 為引入RLPF 的人-機閉環(huán)系統(tǒng)。
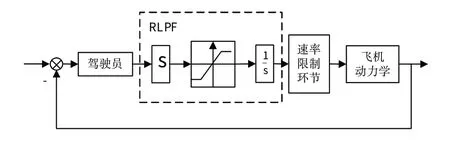
圖3 引入RLPF的人-機閉環(huán)系統(tǒng)Fig.3 Man-machine closed-loop system with RLPF
RLPF限制了舵機的偏轉速率,很好地抑制了PIO問題的發(fā)生。但是RLPF所設定的不穩(wěn)定水平會使俯仰響應遲緩,易造成系統(tǒng)的操縱品質(zhì)急劇降低,嚴重影響飛機的飛行品質(zhì)。為了解決這一問題,在駕駛員輸入指令后加入1 個自適應桿增益,也可稱其為桿位移抑制濾波器,使其與RLPF 一起形成舵機速率保護回路,如圖4所示。
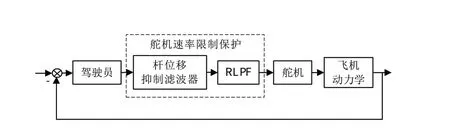
圖4 舵機速率限制保護結構圖Fig.4 Rate-limiting protection structure of steering gear
2.2 桿位移抑制濾波器
桿位移抑制濾波器是通過感受駕駛員操縱輸入的振幅和頻率來決定操縱指令增益的衰減量或抑制程度的,它由幅值通道和幅-頻通道所構成,包含二次遲后-超前濾波器、整流器、一次平滑濾波器以及非線性桿指令函數(shù)等環(huán)節(jié),其結構圖,如圖5所示。
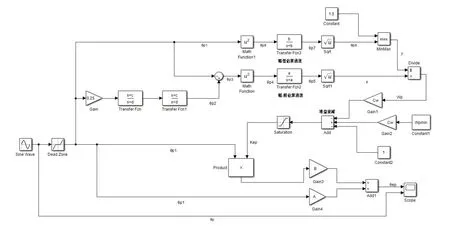
圖5 桿位移抑制濾波器結構圖Fig.5 Bar displacement suppression filter structure
駕駛員操縱的輸入信號經(jīng)過死區(qū),輸入PIO 濾波器之后分成兩路:一路經(jīng)過幅值通道平方后進行低通濾波平滑處理,得到桿輸入振幅的近似均方根值;另一路通過幅-頻估算通道,經(jīng)二次濾波器和結點綜合后得到桿輸入的微分信號,再通過平方和低通濾波器平滑處理,得到均方根值。根據(jù)預先規(guī)定的增益衰減方式,可以確定增益衰減系數(shù),從而改變指令函數(shù)中的非線性項,使有效操控指令相應地減少,操縱面偏角也隨之減小,從而能夠較好地抑制PIO 問題的發(fā)生。
根據(jù)桿位移抑制濾波器的結構圖,可以得到以下的方程:
運用狀態(tài)空間法可以將以上的二階微分方程組轉化為一階微分方程組:
由結構圖中各模塊的邏輯運算關系等,可以得到代數(shù)方程組:
式(6)~(11)中:、、、為選定的濾波器的參數(shù);、為已知的傳動比;、為選定的增益衰減參數(shù)。通過方程組的聯(lián)合求解,我們就可以得到濾波器的輸出。
合理選擇PIO抑制濾波器各環(huán)節(jié)的相關參數(shù)是對其進行特性分析、仿真實現(xiàn)等的必要前提。以某型艦載機為例,假設駕駛員的操縱輸入為=sin,取=10 ,=3 rad s,選定的濾波器參數(shù)==03,=6 ,=3 ,=-025 ,=0.1 ,傳動比常數(shù)=0784,=0134,的下限=15。
2.3 仿真分析
將上述參數(shù)代入圖5 所示的結構圖搭建的MATLAB/Simulink 模型中進行仿真,可以得到如圖6 所示的結果。
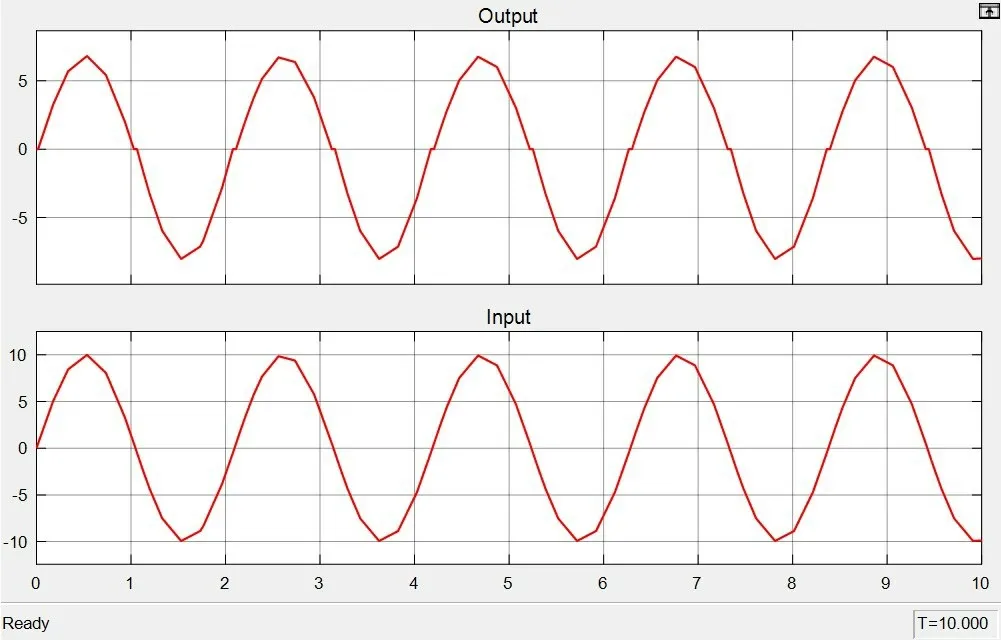
圖6 開環(huán)正弦輸入時PIO抑制濾波器抑制作用Fig.6 Inhibition of the PIO suppresses filterfor the open-loop sinusoidal input
根據(jù)仿真結果可以看到,駕駛員輸入的幅值為10的等幅振蕩,經(jīng)過PIO 抑制濾波器后,幅值降為7,降幅明顯,這為利用PIO 濾波器有效抑制PIO 問題的發(fā)生提供了可能性。另外,可以通過改變上述幾個參數(shù)來改變對PIO濾波器的影響。
將PIO 抑制濾波器引入前面所建立的人-機閉環(huán)模型,假設系統(tǒng)的反饋為單位負反饋,人-機閉環(huán)系統(tǒng)結構圖,如圖7 所示。圖7 中:()為駕駛員準線性模型,即簡化后的McRuer 模型;() 為飛機動力學模型。
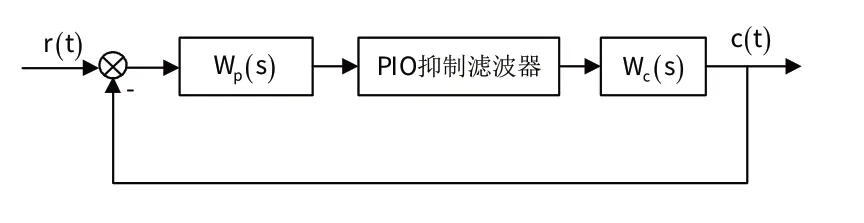
圖7 引入PIO抑制濾波器后的人-機閉環(huán)系統(tǒng)Fig.7 Man-machine closed-loop system after introducing PIO suppression filter
根據(jù)式(1)(2)及上述參數(shù)結果分析,可以確定簡化后的McRuer模型和飛機動力學模型的傳遞函數(shù):

根據(jù)建立的PIO抑制濾波器模型,利用MATLAB/Simulink建立如圖8所示模型。
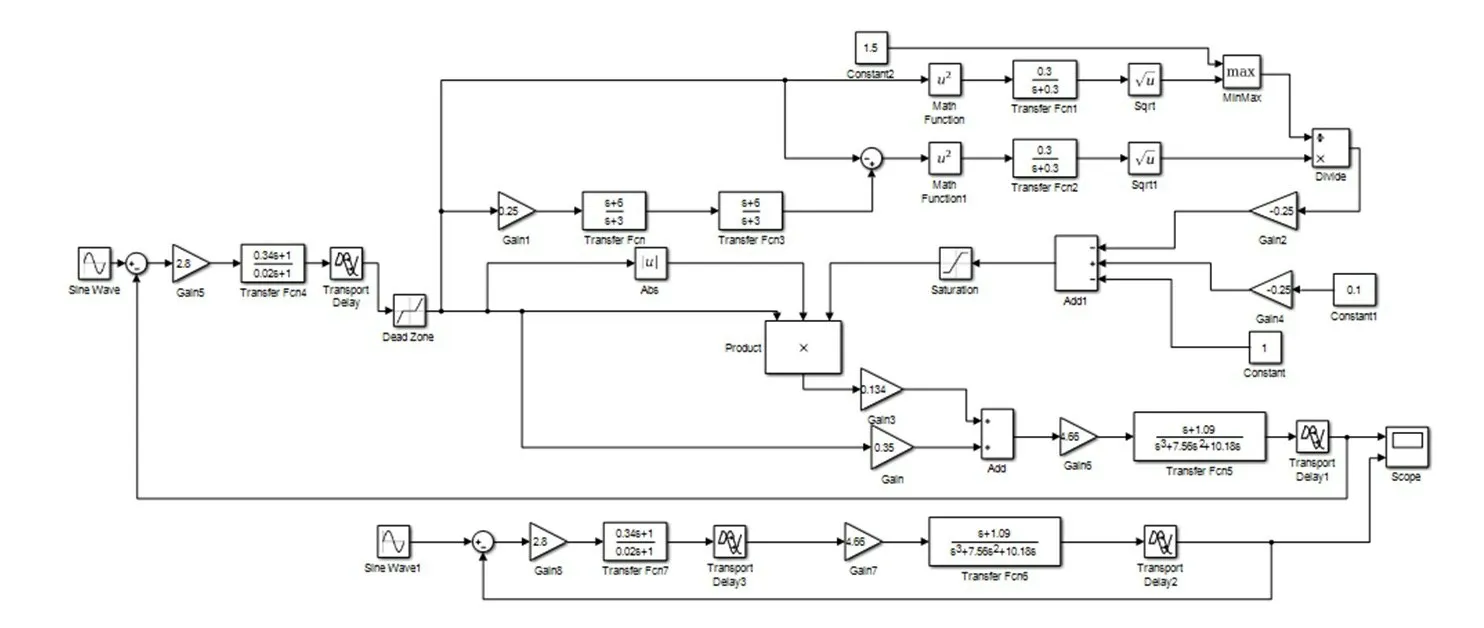
圖8 桿位移抑制濾波器人-機閉環(huán)系統(tǒng)結構圖Fig.8 Structure diagram of the man-machine closed-loop system with bar displacement suppression filter
駕駛桿位移抑制濾波器的抑制作用是通過減小駕駛桿指令函數(shù)中的非線性項來實現(xiàn)的,而其抑制作用的大小與濾波器增益以及衰減等參數(shù)都有著密切的關系。當?shù)慕^對值增加及轉折率減小時,PIO抑制濾波器的抑制量增大。此外,PIO 抑制濾波器中的其他參數(shù),例如二次濾波器中的常數(shù)、和一次濾波器中的、等對其抑制效果和操縱品質(zhì)亦有重要的影響。我們可以得到仿真結果,如圖9、10所示。圖9、10中的第1個波形圖均是引入了PIO抑制濾波器,第2個波形圖是未引入PIO抑制濾波器的。
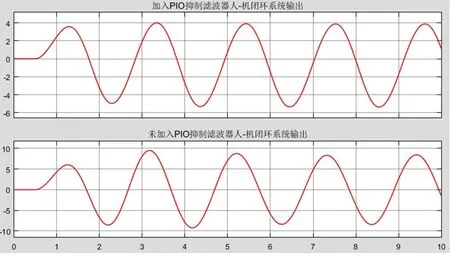
圖9 閉環(huán)正弦輸入時PIO抑制濾波器抑制作用Fig.9 Inhibition of the PIO suppresses filter for the closed-loop sinusoidal input
通過圖9可以看出,在人-機閉環(huán)系統(tǒng)中引入PIO抑制濾波器后能明顯抑制系統(tǒng)的輸出,而未加入PIO抑制濾波器的系統(tǒng)則不具備抑制PIO的能力。
在圖10 中,令俯仰角參考輸入=1,引入了PIO抑制濾波器之后,PIO問題明顯被抑制,而未引入PIO抑制濾波器的閉環(huán)系統(tǒng)產(chǎn)生了容易導致PIO問題發(fā)生的振蕩趨勢。
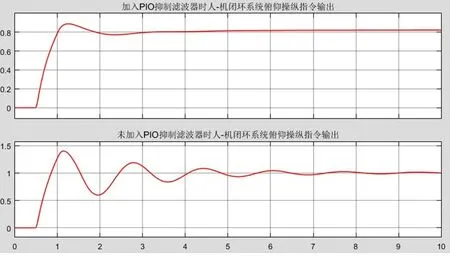
圖10 閉環(huán)俯仰角參考輸入θ0=1°時PIO抑制濾波器抑制作用Fig.10 Inhibition of PIO suppression filter when the closed-loop pitch angle input θ0=1°
如圖11所示,設置參數(shù)令飛機在115 m高度下滑著艦,引入了PIO 抑制濾波器后,PIO 問題明顯被抑制,振蕩顯著減小,下滑過程較為平緩。
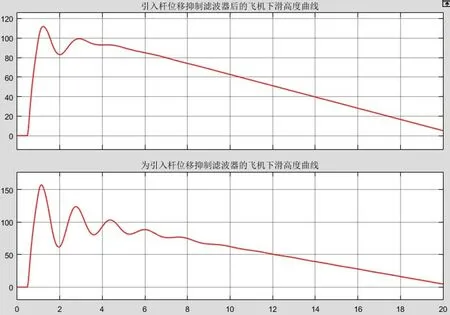
圖11 飛機下滑高度曲線Fig.11 Curve of the aircraft descent height
3 結束語
本文對人-機閉環(huán)系統(tǒng)進行數(shù)學建模,基于Neal-Smith準則,對建立的數(shù)學模型進行參數(shù)匹配,構造了引入桿位移抑制濾波器的防范方案來抑制PIO 問題。通過MATLAB仿真對PIO抑制效果的評估和分析,驗證了所構造的方案對PIO具有良好的抑制作用。該方法和理論能有效減少PIO現(xiàn)象在艦載機著艦過程中對其飛行安全的影響,從而增強飛機的縱向穩(wěn)定性。同時,該方法為今后飛機設計和安全飛行可提供一定的參考借鑒。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
