基于粒子群優(yōu)化的波束空間廣義旁瓣相消算法
2022-10-10 08:13:14李浩洋向建軍李志軍
系統(tǒng)工程與電子技術 2022年10期
李浩洋,向建軍,彭 芳,王 帥,李志軍
(空軍工程大學航空工程學院,陜西 西安 710038)
0 引 言
自適應陣列天線能夠選擇一組振幅和相位權重,并與輸入信號相結合,產(chǎn)生一個人工控制的波束圖,優(yōu)化所接收到的期望信號。這種形式的陣列處理方法提高了信號處理的抗干擾性能。自適應波束形成技術正廣泛應用于軍事雷達、通信、導航等眾多領域。
在實際應用中,為了獲得更好的分辨率和抗干擾能力,通常使用大規(guī)模陣列天線,這就會導致算法運算量增加,成為實現(xiàn)自適應波束形成算法的瓶頸。算法的運算量通常來自于自適應自由度,為了降低算法的運算量,通常采用部分自適應自由度的方法。降秩自適應波束形成是一種常用的采用部分自適應自由度的方法,主要有特征分解類算法,包括主分量法、交叉譜估計法。在實際應用中,由于特征分解類算法復雜度較高,往往在實際工程中難以應用。針對此類問題,文獻[5]提出了波束空間預處理的方法,通過對波束進行預處理,降低了運算空間的維度,有效減少了運算量并抑制干擾。進行波束空間預處理的關鍵在于確定轉(zhuǎn)換矩陣,通常轉(zhuǎn)換矩陣采用無數(shù)據(jù)約束的方法確定,但當旁瓣出現(xiàn)強干擾時,這種方法難以有效抑制。文獻[7]和文獻[8]提出了一種高效自適應波束域轉(zhuǎn)化方法,能夠根據(jù)接收數(shù)據(jù)及時更新轉(zhuǎn)換矩陣,有效抑制干擾,但由于采用特征分解的方法會導致算法復雜度增加。本文針對上述問題,提出了一種簡便的自適應波束域轉(zhuǎn)化方法,不需要特征分解來求解轉(zhuǎn)換矩陣,使算法更易實現(xiàn)。采用這種方法處理廣義旁瓣相消(generalized sidelobe canceller,GSC)算法可以得到波束空間GSC(beam space GSC,BS-GSC)算法。
由于自適應波束形成需要求解復雜的非線性問題,利用傳統(tǒng)的數(shù)學解析方法和數(shù)值優(yōu)化往往難以取得期望效果。粒子群優(yōu)化(particle swarm optimization,PSO)算法是一種具有全局搜索能力的非線性約束優(yōu)化算法,具有很強的穩(wěn)健性,適用于解決非線性優(yōu)化問題。文獻[10]提出的改進PSO算法應用在波束形成中,起到了降低旁瓣和加深零陷的效果,但是存在收斂早熟、易于陷入局部最優(yōu)、搜索范圍小等問題。文獻[11]針對PSO算法易于陷入早熟等問題提出了壓縮因子的方法,使PSO算法的收斂效率有效提升。PSO算法在陣元空間起到了較好波束形成的效果,但目前還沒應用到波束空間中。本文提出了一種基于PSO優(yōu)化的BS-GSC算法,該算法在保證波束形成效果的基礎上顯著降低算法的運算量,并通過粒子群尋優(yōu)手段有效降低波束形成旁瓣,提高了算法在低快拍、強干擾條件下的波束形成能力。
1 信號模型及GSC算法基本原理
在均勻線陣平面內(nèi),假設有個不相關窄帶信號從遠場入射到個陣元中,陣元間距為,信號入射角為θ(=1,2,…,),在遠場空間有一個期望信號()(其來波方向為)和個干擾信號S()(=2,3,…,+1)(其來波方向為θ),每個陣元中的加性高斯白噪聲為()。本文考慮信源與陣列平面共面的情形。陣列接收數(shù)據(jù)矩陣可以表示為
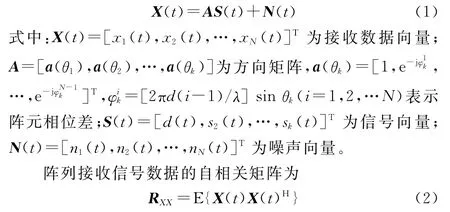
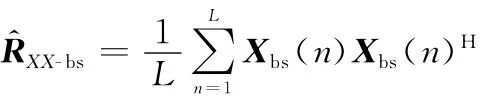
在實際情況中,由于接收的信號數(shù)據(jù)是有限的,接收數(shù)據(jù)是通過有限快拍數(shù)得到的,在有限快拍數(shù)下的自相關矩陣為

本文采用GSC算法對上述問題分析,其結構如圖1所示。圖1中,()為輸入信號,()為輸出信號。
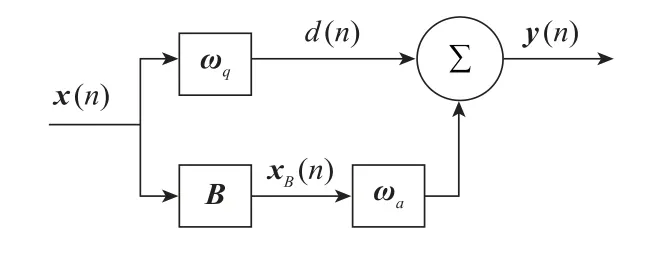
圖1 傳統(tǒng)GSC結構框圖Fig.1 Structure block diagram of traditional GSC
GSC結構將信號分為兩個支路,在上支路中ω為固定波束形成權矢量:

式中:=[(),(),…,(θ)]為約束矩陣;為相對應的約束響應矢量。
在下支路中,為達到阻塞期望信號的目的,通常在自適應權矢量ω前添加阻塞矩陣,阻塞矩陣需要滿足=0。通過自適應權矢量ω讓x ()逼近期望信號(),可以依據(jù)最小均方誤差原則進行維納濾波:

求得自適應權矢量ω為

最終得到的GSC的權矢量可以寫為

2 基于粒子群的BS-GSC算法原理與流程
2.1 BS-GSC算法
針對傳統(tǒng)GSC算法在信號處理過程中陣元數(shù)量多,導致算法的運算量較大、運算時間長、復雜度高的問題,通常采用變換域的方法對陣列接收數(shù)據(jù)進行預處理,通過轉(zhuǎn)換矩陣將信號處理過程由原本的陣元空間轉(zhuǎn)換到空間相對較小的波束空間,從而減小了算法的運算量并提高了算法的穩(wěn)健性。本文選取了一種簡便的自適應波束空間變換方法,該方法可以根據(jù)接收數(shù)據(jù)自適應調(diào)整變換矩陣,有效地提高了運算效率。
首先選擇(<)個正交波束,根據(jù)陣元導向矢量構建×的無數(shù)據(jù)約束轉(zhuǎn)換矩陣。轉(zhuǎn)化矩陣為

式中:I 為維單位矩 陣。
可以看作由個正交向量t (=1,2,…,)所張成的子空間。t 根據(jù)正交原理可以表示為

由以上公式可以推出:

在保證期望角度范圍內(nèi)任意方向的響應均無失真的條件下,自適應調(diào)整轉(zhuǎn)換矩陣,使輸出總功率最小。本文采用最小輸出功率原則,具體準則可以表述為



因此,最小輸出功率準則可以轉(zhuǎn)化為

根據(jù)式(15)可以求得,轉(zhuǎn)換矩陣的表達式為

因此,波束空間信號數(shù)據(jù)()和導向矢量()可以表示為


BS-GSC的其他變量可根據(jù)傳統(tǒng)GSC原理求解,BSGSC框圖如圖2所示。
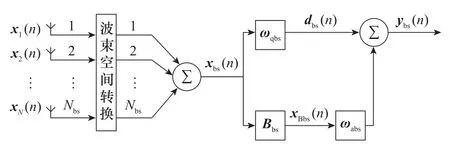
圖2 BS-GSC結構框圖Fig.2 Structural block diagram of BS-GSC
BS-GSC具體流程如下。
由式(16)確定轉(zhuǎn)換矩陣,通過轉(zhuǎn)換矩陣將陣元域信號數(shù)據(jù)()和陣列響應矢量()轉(zhuǎn)換到波束空間,求得波束空間信號數(shù)據(jù)()和陣元響應矢量();

根據(jù)信號相消原理=-,求得GSC的最佳權矢量。
2.2 基于粒子群的BS-GSC算法
本節(jié)針對廣義波束旁瓣相消器在低快拍情況下出現(xiàn)的不收斂和波束形成性能較差的問題,結合變換域原理,對信號數(shù)據(jù)進行全局搜索。在標準粒子群的算法基礎上,通過引入壓縮因子來加快粒子群的收斂性。
PSO是一種群智能算法,主要通過粒子間尋優(yōu)與更新的迭代手段求得最優(yōu)解。粒子的好壞由適應度函數(shù)來評價,在搜索解的過程中,每一個粒子都具有一組權值l 和一組權值更新速度向量v ,通過對粒子的權值與權值更新速度進行更新來得到最優(yōu)解。本文通過PSO算法,以BS-GSC的自適應權矢量為變量,以輸出最小均方誤差為適應度函數(shù)、以輸出最小均方誤差為目標尋取最優(yōu)解。定義適應度函數(shù)為

在空間內(nèi)隨機設置個粒子,進行第次迭代后,第個粒子的權值和權值更新速度分別為
經(jīng)過次迭代后,粒子的權值和權值更新速度均是經(jīng)過多次優(yōu)化的結果。繼續(xù)迭代時,粒子會在自身的鄰域內(nèi)尋找適應度函數(shù)最佳的權值,并將鄰域內(nèi)的最優(yōu)點與粒子局部最優(yōu)點進行比較,將適應度函數(shù)最小的點作為粒子局部最優(yōu)點,即

更新局部最優(yōu)點后,比較所有粒子的局部最優(yōu)點,并將適應度函數(shù)最小的點設為全局最優(yōu)點,即
同時也增強了算法局部搜索能力,壓縮因子粒子群算法權值更新速度和權值更新公式如下所示:
式中:表示壓縮因子。

2.3 算法流程

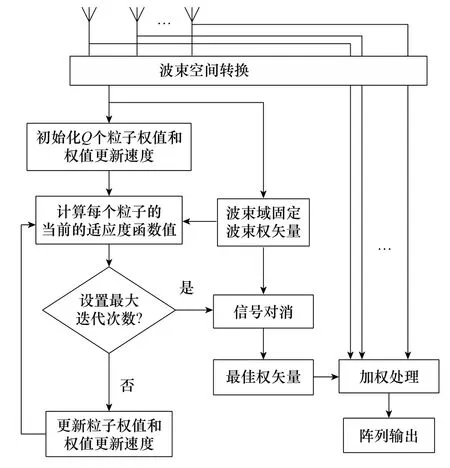
圖3 基于PSO的BS-GSC框圖Fig.3 Block diagram of BS-GSC based on PSO
在PSO算法中,設定每個粒子的維度與正交波束數(shù)量相同,粒子權值即為陣列權值,當循環(huán)次數(shù)達到最大迭代次數(shù)時算法終止,最大迭代次數(shù)通常與粒子數(shù)有關,粒子數(shù)量越大,算法收斂所需迭代次數(shù)越少。根據(jù)上述流程,本文算法計算步驟如下。
設定陣元數(shù)量為,快拍數(shù)為,正交波束數(shù)量為。
確定轉(zhuǎn)換矩陣與陣元接收數(shù)據(jù)矩陣相乘得到波束空間信號接收數(shù)據(jù)()。

初始化粒子群,給定粒子群規(guī)模和循環(huán)次數(shù),隨機產(chǎn)生粒子初始權值l 和權值更新速度v ,其中粒子權值由波束空間自適應權矢量代替。
計算各粒子當前的適應度函數(shù)。


根據(jù)迭代次數(shù)重復步驟5~步驟7,輸出最后一次的全局最優(yōu)值,作為BS-GSC的自適應最優(yōu)權系數(shù)。
據(jù)信號相消原理=-,求得GSC的最佳權矢量。
計算陣列的輸出()。計算公式如下:

2.4 運算量和復雜度分析

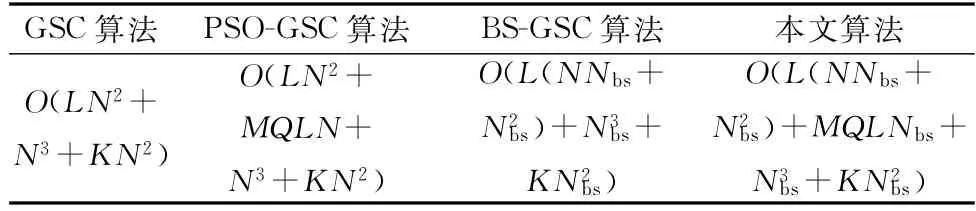
表1 算法運算量對比Table 1 Algorithm computation comparison
由表1可知,本文算法所在的波束空間相比于GSC和PSO-GSC的陣元空間(?)數(shù)據(jù)維度減小,算法的自由度降低,算法的運算量和復雜度均減小,由于本文算法的所有運算都是在波束空間進行,因此整體運算量要小于以上兩種算法,進行大規(guī)模陣列運算時實時性更好。由于本文算法采用粒子群尋優(yōu)手段求取最優(yōu)權值需要進行次迭代更新,運算量高于BS-GSC算法,但PSO算法采用最小均方誤差準則迭代尋優(yōu),相對簡單,算法復雜度較低。
3 算法仿真與分析
使用Matlab軟件對本算法進行仿真模擬,原始數(shù)據(jù)為:陣元數(shù)=30,正交波束數(shù)量=10,期望信號角度=10°,干擾信號角=20°,=-20°,=60°,=-60°,粒子數(shù)為500,迭代次數(shù)為100,設定目標信號為帶寬30 M Hz、中心頻率為50 MHz的線性調(diào)頻信號,干擾和噪聲均為高斯白噪聲。令信噪比(signal to noise ratio,SNR)為-10 dB,干噪比(jammer to noise ratio,JNR)為10 dB,快拍數(shù)=500。在上述條件下進行仿真分析。
3.1 陣列響應性能
圖4的均勻線陣三維視圖展示了陣列響應增益與快拍數(shù)和角度的關系。可以看出,本文提出算法的波束形成的主方向0°的陣列幅度為0 dB,可以精準地指向期望來波信號的方向,并在干擾方向產(chǎn)生了陣列幅度小于-120 dB的零陷,在4個干擾方向均形成了較深的零陷。通過陣列響應增益隨快拍數(shù)的變化,可以看出本文算法雖然在極低快拍下會出現(xiàn)波形畸變的現(xiàn)象,但快拍數(shù)為20時,已經(jīng)具有了良好的波束形成能力,因此本文算法在整體上具有良好的波束形成效果。
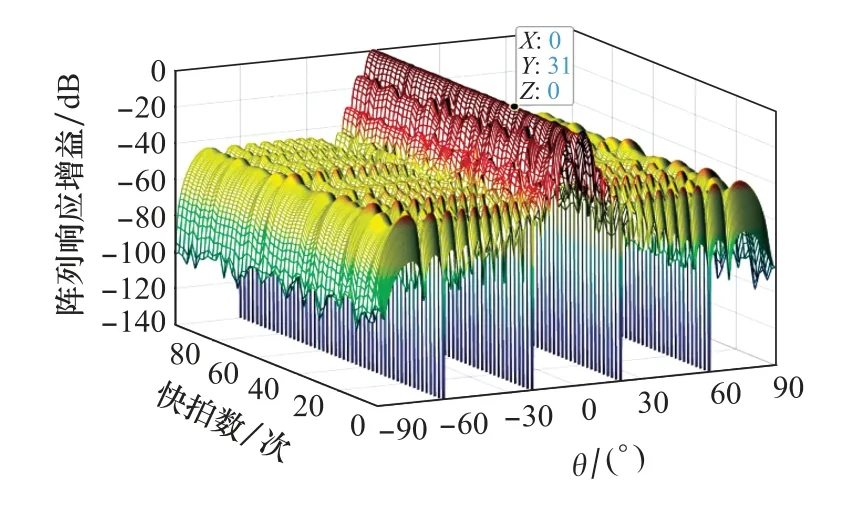
圖4 均勻線陣三維波束圖Fig.4 Three-dimensional beam pattern of uniform linear array
圖5將本文算法與GSC、PSO-GSC和BS-GSC算法進行對比。可以看出,4種算法均在期望方向上形成了主瓣,且主瓣寬度近乎相同。其中,本文算法具有更低的旁瓣,主要是由于構造轉(zhuǎn)換矩陣時,采用最小輸出功率準則,自適應調(diào)整轉(zhuǎn)換矩陣,在保證期望方向信號的增益不變的同時,使總輸出功率降低,從而降低波束旁瓣。并且,本文采用PSO算法和最小均方誤差準則,通過粒子的迭代更新逐漸縮小與期望信號的誤差,進一步降低了波束旁瓣。
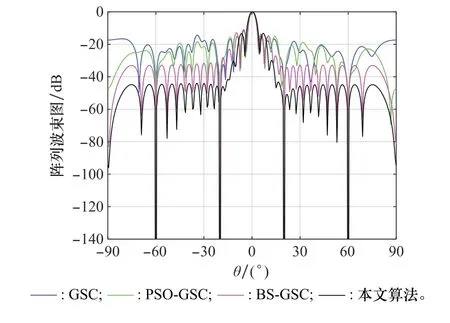
圖5 波束形成對比圖Fig.5 Comparison of beamforming
3.2 正交波束數(shù)量對本文算法的影響
在其他條件不變的情況下,將正交波束數(shù)量由8增加到17,得到波束形成方向圖,如圖6所示。由圖6可以看出,隨著正交波束數(shù)量的增加,波束的旁瓣略有降低,這主要是由于當波束數(shù)量增加時算法的自由度增加,使得算法的精度更高,效果更好。但是自由度的增加也會使算法的復雜度和運算量增加,因此確定正交波束數(shù)量時要選擇合適的值。
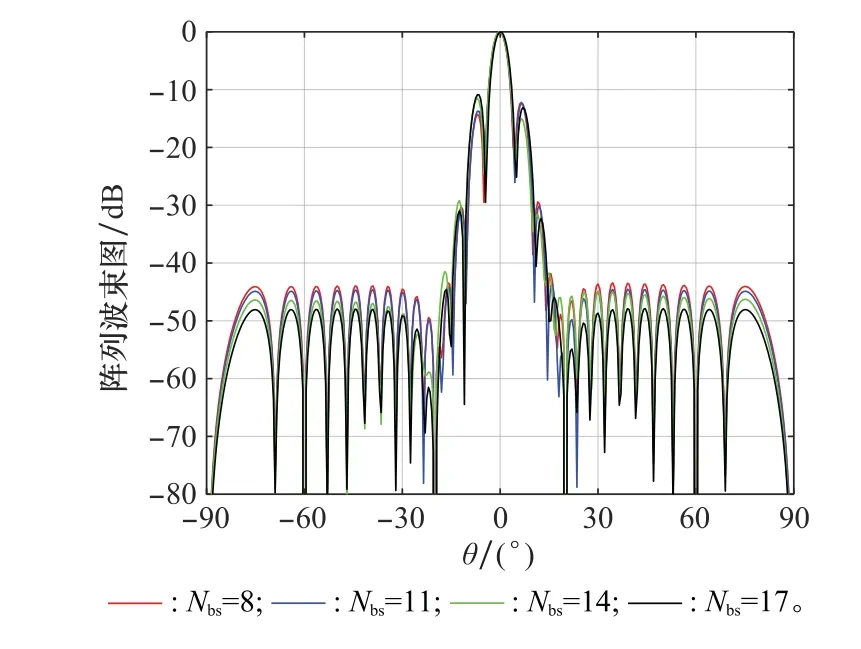
圖6 本文算法在不同正交波束下的波束方向圖Fig.6 Beam pattern of the proposed algorithm under different orthogonal beams
3.3 抗干擾性能分析
在其他條件不變的情況下,將JNR由-10 dB增加到150 d B,得到波束形成方向圖,如圖7所示。
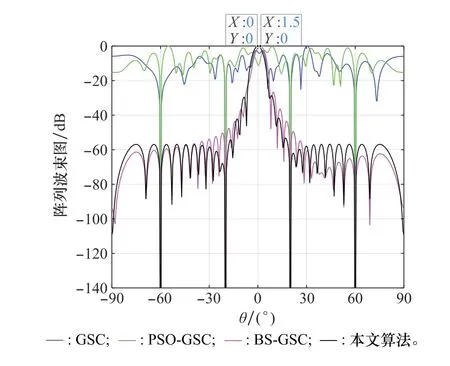
圖7 JNR為150 dB時4種算法波束方向圖Fig.7 Beam patterns of four algorithms when the JNR is 150 d B
由圖7可以看出,當JNR增加時,4種算法的性能都會受到影響。由于干擾功率過強,GSC和PSO-GSC算法已經(jīng)無法在期望方向上形成主瓣,BS-GSC算法可以正常形成主瓣但出現(xiàn)了1.5°的角度偏差。本文算法雖然主瓣變寬,但是仍可以在期望方向形成主瓣,可見在波束空間應用PSO算法,可以獲得更好的干擾抑制效果。
在保持上述條件不變的前提下,設置JNR的區(qū)間為[-30,150]d B,對4種算法求解均方誤差,得到圖8所示的均方誤差隨JNR的變化曲線。由圖8可以看出,4種算法在JNR低于140 dB時,均方誤差穩(wěn)定震蕩;當JNR大于140 dB時,GSC均方誤差隨JNR的增加而迅速增加,其他3種算法的均方誤差幾乎保持不變;總體上看,BS-GSC和本文算法的均方誤差值較小,PSO-GSC算法的均方誤差略高于此兩者算法。
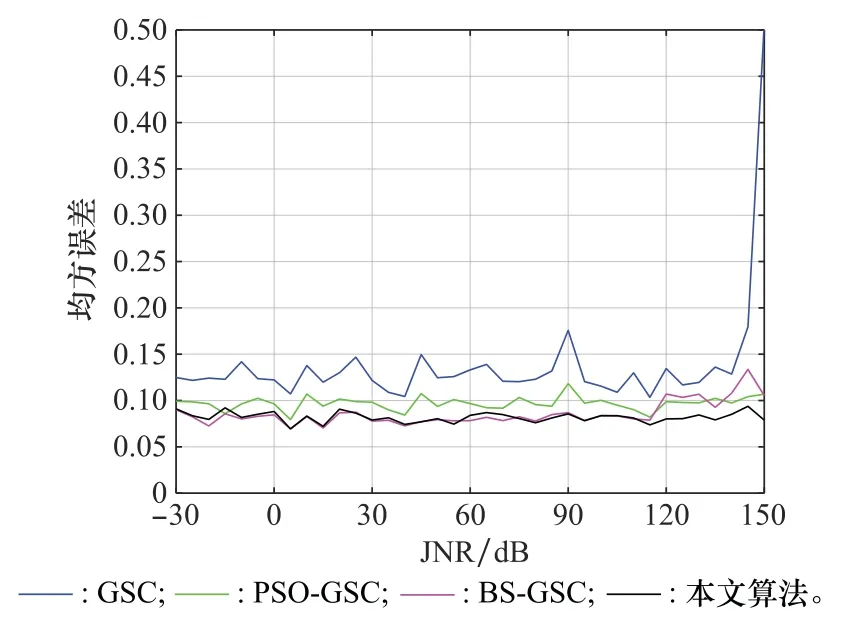
圖8 不同JNR對4種算法影響Fig.8 Influence of four algorithms with different JNRs
為更好地探究快JNR對本文算法的影響,取JNR分別為0 d B、30 dB、60 dB、90 dB、120 d B,其他條件與上述一致,得到波束方向圖如圖9所示。
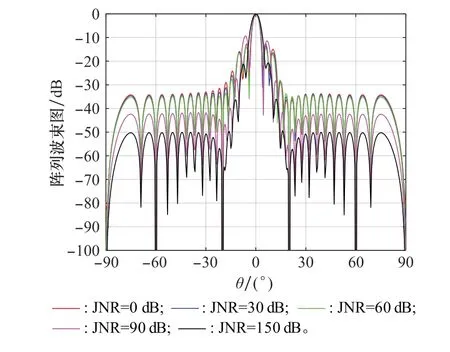
圖9 本文算法在不同JNR下的波束方向圖Fig.9 Beam pattern of the proposed algorithm under different JNRs
由圖9所示,本文算法波束形成方向圖的旁瓣隨JNR增加而降低,但當JNR過大時,由于干擾功率過強,導致波束形成方向圖的主瓣寬度增加,波束形成性能下降,信號的角度分辨率下降。總體上看,本文算法具有較好的抗干擾性能。
3.4 SNR對算法的影響
在其他條件不變的情況下,將信號的SNR由-10 dB增加到10 d B,得到波束形成方向圖如圖10所示。由圖10可以看出,當SNR增加時,4種算法的性能都會受到影響,GSC、PSO-GSC、BS-GSC算法已經(jīng)無法在期望方向上形成主瓣,這主要是由于當SNR增加時,期望信號的功率較大,導致阻塞矩陣不能完全阻塞期望信號,從而導致期望信號對消的現(xiàn)象。而本文算法雖然主瓣變寬,但是仍可以在期望方向形成主瓣,可見本文算法在抑制期望信號對消方面也有較大優(yōu)勢。
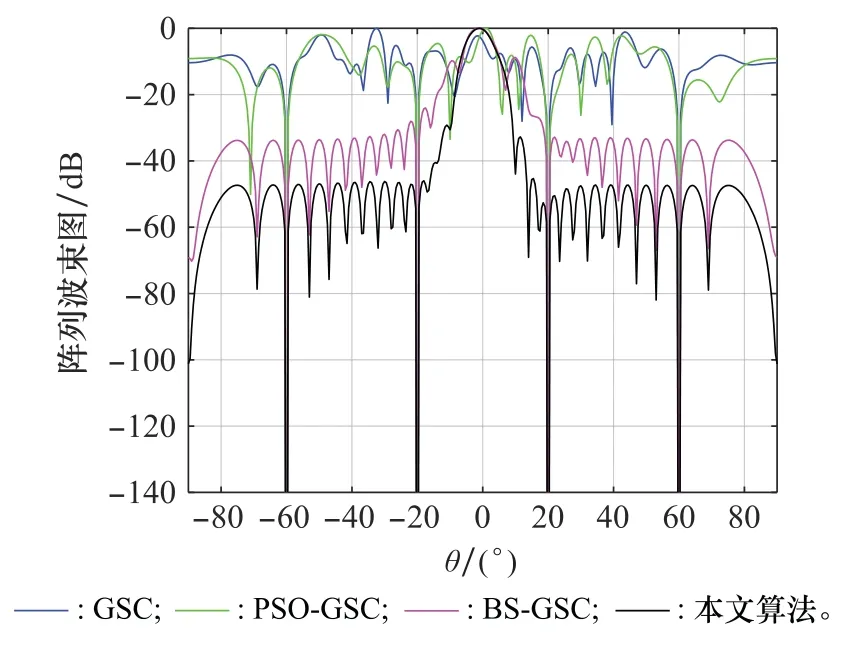
圖10 SNR為10 dB時4種算法波束方向圖Fig.10 Beam pattern of four algorithms when the SNR is 10 dB
在保持上述條件不變的前提下,設置SNR的區(qū)間為[-10,30]dB,對4種算法求解均方誤差,得到如圖11所示的均方誤差隨SNR的變化曲線。由圖11可以看出,4種算法在SNR低于15 d B時,均方誤差趨于零且平穩(wěn);當SNR在[15,25]dB時,GSC和PSO-GSC算法的均方誤差隨SNR的增加而增加,其他兩種算法的均方誤差幾乎保持不變;當SNR大于25 dB時,4種算法的均方誤差均隨SNR增加而增加,GSC算法的均方誤差增加得最快,PSO-GSC算法其次,BS-GSC算法和本文算法均方誤差最小且增加速度相當。
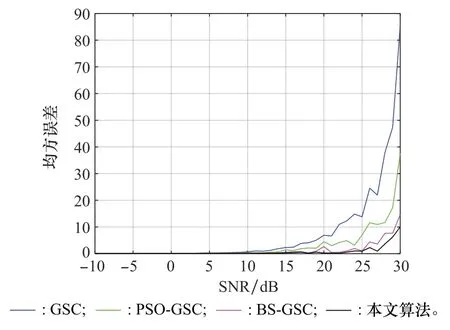
圖11 不同SNR對4種算法影響Fig.11 Influence of four algorithms with different SNRs
為更好地探究SNR對本文算法的影響,取SNR為-20 dB、-10 dB、0 dB、10 d B、20 d B,其他條件與上述一致,得到波束方向圖如圖12所示。由圖12所示,本文算法在SNR小于10 d B時,可以在期望信號方向形成主瓣。當SNR為20 d B時,由于期望信號相消導致無法在期望信號方向形成主瓣。由此可以看出,本文算法在一定程度上可以抑制期望信號相消,當SNR過大時,算法的波束形成性能會惡化。
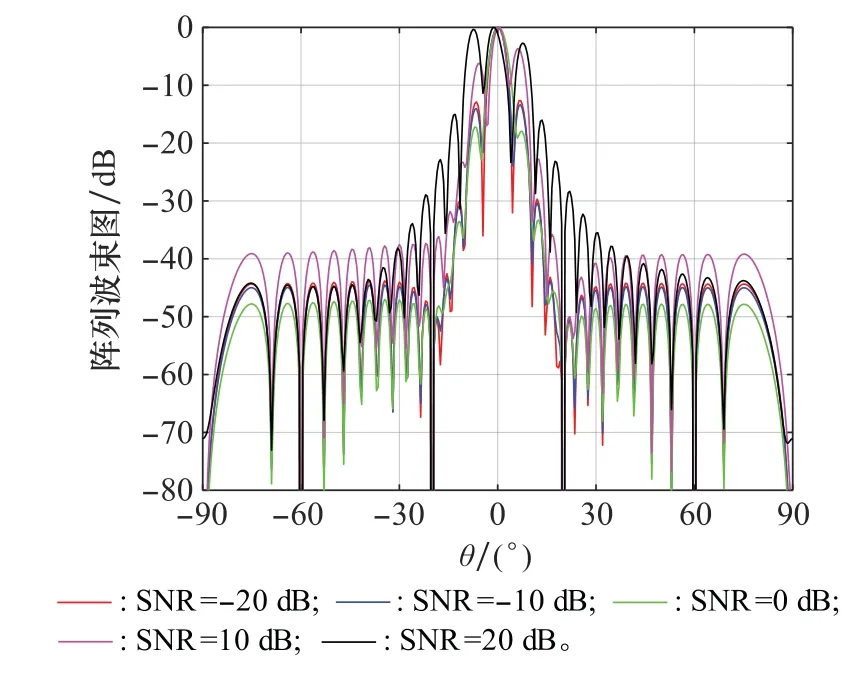
圖12 本文算法在不同SNR下的波束方向圖Fig.12 Beam pattern of the proposed algorithm under different SNRs
3.5 快拍數(shù)對算法的影響
在其他條件不變的情況下,將快拍數(shù)設定為20,得到波束形成方向圖如圖13所示。
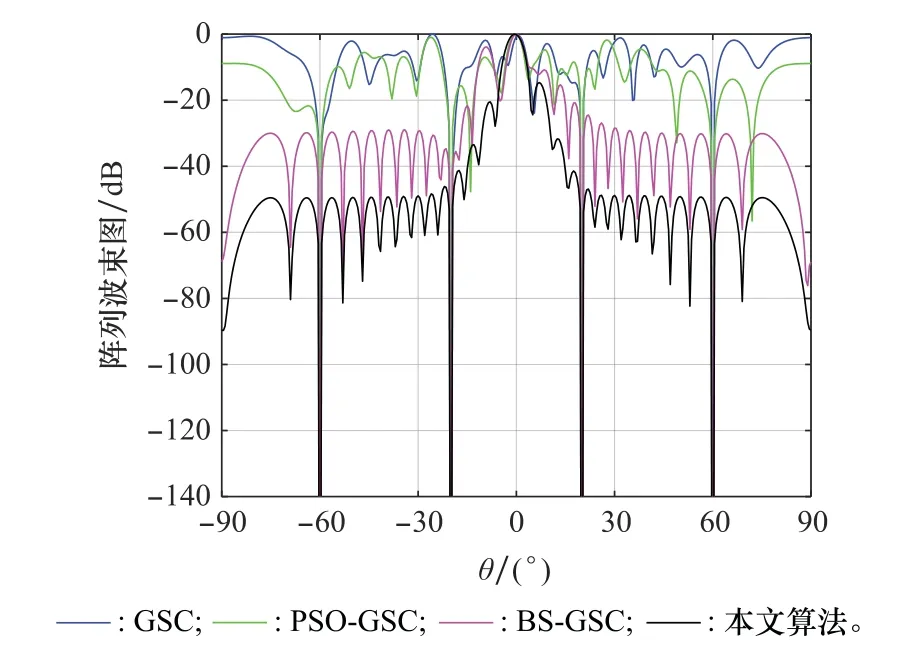
圖13 快拍數(shù)為20時4種算法波束方向圖Fig.13 Beam pattern of four algorithms when snapshot number is 20
由圖13可以看出,在低快拍情況下,GSC算法已經(jīng)無法在期望方向形成主瓣,波束方向圖出現(xiàn)嚴重惡化,PSOGSC算法和BS-GSC算法可以正常形成主瓣,但是旁瓣電平升高,波束形成性能變差,導致虛警概率升高。本文算法依舊可以形成正常主瓣,但是主瓣寬度略有增加,旁瓣電平保持不變。由上可知,在低快拍的條件下,本文算法的期望信號波束指向和旁瓣抑制性能較好。
在保持上述條件不變的前提下,設置快拍數(shù)的區(qū)間為[0,400],對4種算法求解均方誤差,得到如圖14所示的均方誤差隨快拍數(shù)的變化曲線。由圖14可以看出,4種算法的均方誤差數(shù)值均隨快拍數(shù)的增加而減小,其中傳統(tǒng)GSC算法的均方誤差大于其他3種算法。BS-GSC和本文算法的均方誤差較小,在低快拍的條件下本文算法均方誤差小于BS-GSC算法,當快拍數(shù)較高時,兩種算法的均方誤差數(shù)值趨于穩(wěn)定且相近。
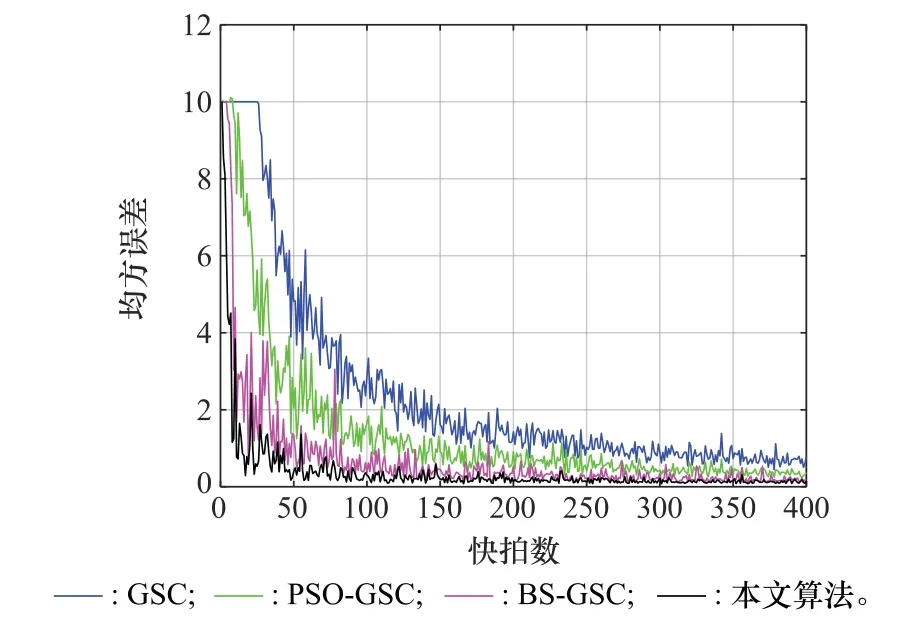
圖14 不同快拍數(shù)對4種算法影響Fig.14 Influence of different snapshot numbers on four algorithms
為更好地探究快拍數(shù)對本文算法的影響,取快拍數(shù)分別為10、30、60、100、200,其他條件與上述一致,得到波束方向圖如圖15所示。
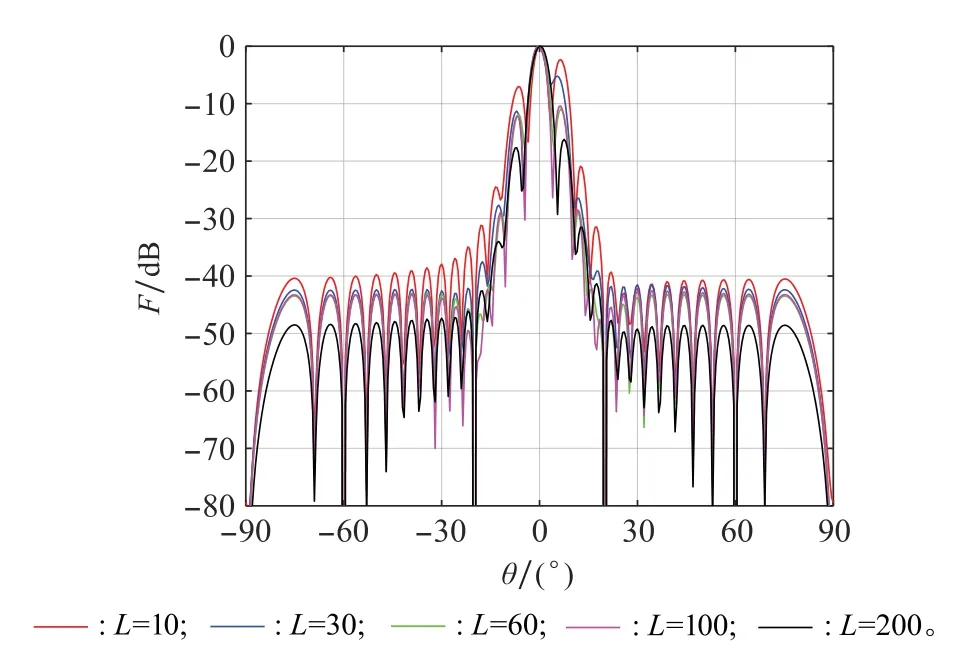
圖15 本文算法在不同快拍數(shù)下的波束方向圖Fig.15 Beam pattern of the proposed algorithm under different snapshot numbers
由圖15可以看出,本文算法的旁瓣隨著快拍數(shù)的增加逐漸降低,當快拍數(shù)為10時,旁瓣電平相對偏高,但仍然可以在期望信號方向形成主瓣,并且隨著快拍數(shù)的增加波束旁瓣逐漸降低。可見本文算法在低快拍的情況下,依舊可以保持良好的波束形成能力。
3.6 來波方向?qū)λ惴ㄐ阅艿挠绊?/h3>
在其他條件不變的情況下,將信號的來波方向分別調(diào)整為:期望信號角度=0°,干擾信號角=3°,=-5°,=5°,=-3°和期望信號角度=0°,干擾信號角=5°,=-5°,=10°,=-10°,由圖16和圖17可知,當干擾方向與期望信號方向較近時,4種算法可以在期望方向形成主瓣,但當干擾進入主瓣方向時,4種算法均無法在期望信號方向形成主瓣,因此本文算法的抗主瓣干擾能力仍需提高。
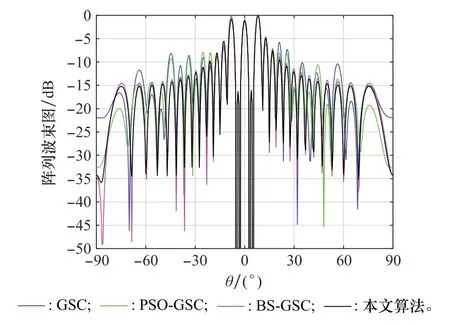
圖16 來波方向為0°、3°、-5°、5°、-3°時波束方向圖Fig.16 Beam pattern when the incoming wave direction is 0°,3°,-5°,5°,-3°
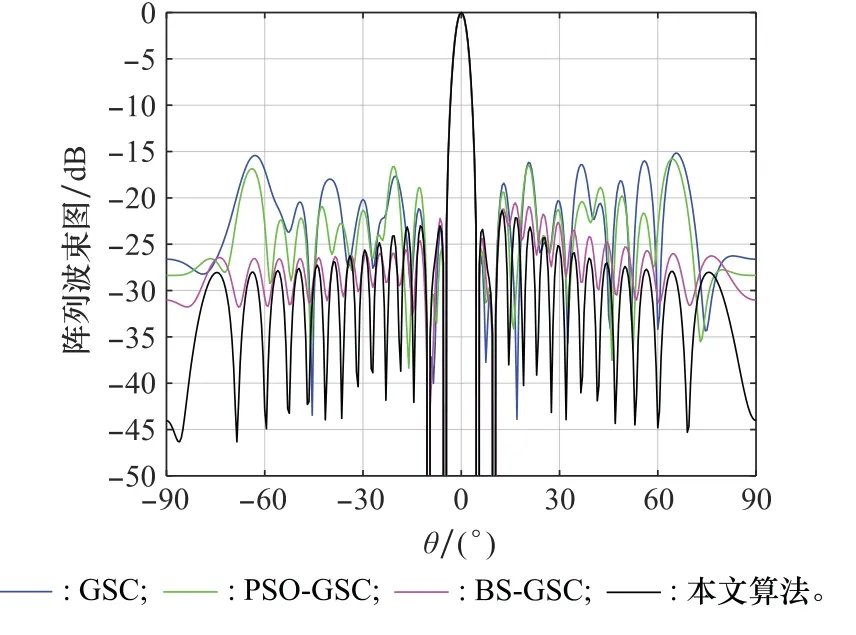
圖17 來波方向為0°、5°、-5°、10°、-10°時波束方向圖Fig.17 Beam pattern when the incoming wave direction is 0°,5°,-5°,10°,-10°
由圖18可知,當SNR小于10 dB時,4種算法的輸出SINR均隨SNR增加而近似線性增加,且輸出SINR的值較為相近;當SNR在[10,30]dB時,GSC和PSO-GSC算法出現(xiàn)飽和,其他兩種算法輸出SINR隨SNR增加而增加;當SNR大于30 d B時,本文算法輸出SINR隨SNR增加而緩慢增加,BS-GSC算法則出現(xiàn)緩慢下降的趨勢。總體上看,本文算法的輸出SINR相比于其他3種算法均有提高,因此在保持其他條件穩(wěn)定不變的情況下,本文算法的輸出形成優(yōu)于其他3種算法。
3.7 輸出性能分析
將快拍數(shù)設定為400,令SNR從-40 d B增加到70 dB,其他條件保持不變,比較4種算法輸出信干噪比(signal to interference plus noise ratio,SINR)與輸入SNR的變化關系,結果如圖18所示。
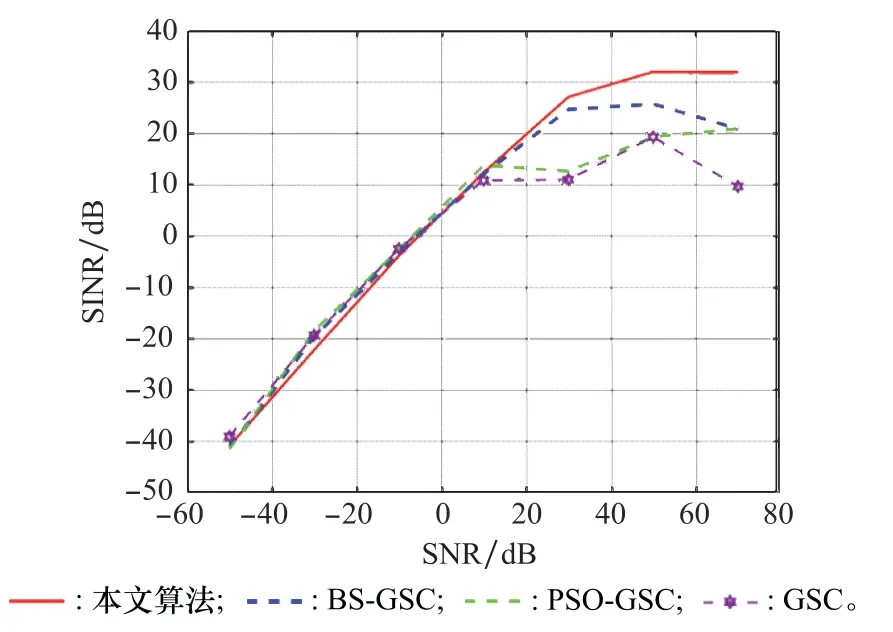
圖18 4種算法輸出SINR隨輸入SNR的變化曲線Fig.18 Variation curve of output SINR of four algorithms with input SNR
4 結 論
本文基于傳統(tǒng)GSC算法工程應用廣泛的實際,針對GSC運算量過大、波束旁瓣較高、在低快拍條件下波束形成效果不理想的問題,提出了一種基于PSO算法的BS-GSC算法。本文算法采用一種高效的自適應轉(zhuǎn)換矩陣方法,將接收數(shù)據(jù)由陣元空間轉(zhuǎn)到波束空間,以降低算法的自由度為前提并有效減少了運算量。同時,利用粒子群尋優(yōu)手段充分挖掘信號數(shù)據(jù)的相關性,并引入壓縮因子的概念增強算法的局部搜索能力,增強了算法的穩(wěn)健性。仿真結果表明,本文算法在強干擾和低快拍的條件下,仍具有良好的波束形成能力,并有效改善了期望信號對消的現(xiàn)象。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
