多頻帶互相干處理中多目標相位補償方法
2022-10-10 08:13:26呂曉德李苗苗劉忠勝
系統工程與電子技術 2022年10期
王 寧,呂曉德,李苗苗,3,劉忠勝
(1.中國科學院空天信息創新研究院,北京 100094;2.微波成像技術國家級重點實驗室,北京 100190;3.中國科學院大學電子電氣與通信工程學院,北京 100049)
0 引 言
根據傅里葉分析的理論,一個域的更高分辨率需要其變換域具有更寬的支撐區間。因此,為了提高距離分辨率需要加寬發射信號的帶寬,例如使用線性調頻(linear frequency modulation,LFM)信號。但由于頻譜資源以及硬件的限制,無法任意增大單一輻射源的帶寬,此時就可以考慮對多頻帶信號進行相參處理,即將不同子帶的信號通過插值和外推的手段進行拼接,從而獲得大帶寬的信號。
早期多帶相參處理的想法由林肯實驗室Cuomo等提出,通過使兩部雷達發射不同頻段的信號,并同時接收這兩個頻段的回波信號,運用基于擬合模型的插值方法補全處于不同頻帶信號之間空缺的數據,由此形成寬帶信號,提高成像分辨率;近兩年,多帶相參處理在光子雷達測距和逆合成孔徑雷達(inverse synthetic aperture radar,ISAR)領域有所應用。多帶相參處理的一個關鍵技術是對不同頻帶信號進行互相干處理,使插值后的頻帶數據在拼接點處具有相位連續性,從而滿足相參處理的條件。回波匹配濾波后的頻譜體現為全極點模型,Cuomo等認為不同頻帶信號的頻譜會差一個固定相位和線性相位,需要通過非線性優化來實現互相干處理,但沒有詳細論述所差相位的來源,也沒有考慮目標運動帶來的影響。多帶之間的相位差異一方面來源于觀測條件的不同,例如初始相位的不同、回波路徑的不同等,另一方面來源于目標運動;一般默認由于觀測條件不同導致的相位差異對不同的目標是一樣的,而由于目標運動導致的多普勒相位差異是依賴于目標運動速度大小的,且目標速度通常是未知的。文獻[8]考慮了在多頻帶多雷達融合成像中,由于多部雷達觀測條件不一致所造成的幅相差異,建立了相關的誤差模型,但沒有考慮由于目標運動帶來的多普勒相位差異。文獻[9-14]使用了不同的方法來處理不同頻帶信號的相位差異,但沒有詳細考慮目標運動帶來的多普勒相位差異。文獻[15-17]考慮了存在動目標時的互相干處理,但在做速度補償時需要估計目標速度,而且沒有考慮存在速度不同的多目標時,需要補償不同的相位,也沒有考慮子帶之間脈沖重復時間(pulse repetition interval,PRI)不同帶來的影響。文獻[18-19]考慮了載頻不同導致不同頻段數據的多普勒維尺度不同,利用Keystone變換使其尺度統一;但未考慮PRI不同對多普勒維尺度的影響,而原始的Keystone變換是無法處理該影響的。
綜上,雖然以往也有文獻考慮到目標運動會帶來子帶之間的相位差異,但還尚未有文獻考慮到當多帶信號的載頻、PRI都不同,并且回波中存在不同速度目標時,每個目標的多普勒相位在不同頻帶上是不同的,這導致不能通過乘以一個統一的修正相位來補償不同頻帶上的多普勒相位信息。本文針對這一問題,在已有工作的基礎上,提出一種基于Keystone變換的多普勒相位補償方法,在速度未知的情況下,可以在補償距離徙動的同時補償不同頻帶信號上的多普勒相位,在此基礎上通過插值的方法對不同頻帶進行相參處理拼接成大帶寬信號,從而提高距離分辨率。通過理論分析和仿真驗證說明該方法的可行性,該方法可以在多目標場景下補償多普勒相位。
本文后續結構如下:第1節建立了多頻帶相參處理模型,詳細分析了多帶信號之間相位差異的形式;第2節簡潔介紹了Keystone變換;第3節給出了基于Keystone變換的多普勒相位補償方法的理論分析;第4節介紹了信號處理流程;第5節給出在單目標及多目標場景下的仿真結果,并利用已有的單頻帶實測數據進行了半實測半仿真試驗,驗證方法的可行性;第6節對本文內容進行了總結,并說明了應用價值。
1 多頻帶相位差異模型
假設有兩部脈沖體制的雷達在相近的時間內發射信號,所用的兩部雷達的脈沖信號應保證在一個相干處理間隔(coherent processing interval,CPI)之內,但所發信號的載頻、PRI、時寬、帶寬均可不同,并且兩部雷達之間的距離遠小于目標的距離,這樣可以保證目標響應在兩部雷達之間的觀測相關性,條件約束與常規脈沖雷達類似。假設脈沖多普勒雷達每個CPI中接收個脈沖回波,則回波模型可以表示為

式中:是一個常數,表示回波大小;()是所發射帶寬為的信號;T 是PRI;是載頻;()是回波時延。假設目標在雷達視線方向上勻速運動,則有()=-2/c,=2/c,其中,是動目標的初始距離。假設動目標在一個脈沖發射到接收的過程中距離是不變的,則經過下變頻后可以表示為
式中:=-m T ,表示快時間,表示慢時間。s(,)做完匹配濾波后,假設頻譜幅度近似為常數,則在快頻率-慢時間域有如下形式:

式中:f 為目標的多普勒;f 為目標的快頻率;是系數;是頻域采樣點數。表達式分別為

可以看出,匹配濾波后的信號在快頻率 慢時間域呈現一個二維復正弦的形式。兩部雷達信號的回波可以表示為
式中:f 、f 分別表示目標在兩部雷達回波中的多普勒;f 、f 分別表示目標在兩部雷達回波中的快頻率;兩部雷達信號回波中的取值邊界分別用和表示,計算方式與相同。

當以式(5)為準,調整式(6)的線性相位、固定相位和幅度后,可將式(5)和式(6)重寫為

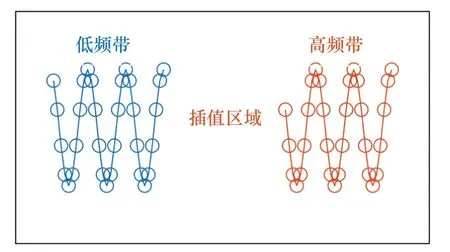
圖1 帶寬插值Fig.1 Bandwidth interpolation
以往文獻只考慮了上述的固定相位,線性相位以及幅度的差異,并將對其補償的過程稱為互相干處理,但是很少有考慮第一個復指數項的差異,即動目標多普勒相位的差異,該差異具有速度依賴性,多目標場景下不能通過乘以統一的相位來補償;而且速度通常是未知的,需要在速度未知的情況下去補償。
2 Keystone變換
由于觀測目標與雷達之間存在相對運動,時延在每一個脈沖回波中都不一樣,當相對運動速度太大時,這些時延的差異不可忽略,會對之后的相參積累造成影響,即距離徙動。Keystone變換是常用的矯正線性距離徙動的方法,最早在合成孔徑雷達(synthetic aperture radar,SAR)領域被使用,后來也被用于脈沖多普勒體制雷達。距離徙動的因素正體現在式(4)中的“1+”,這一項使得快頻率維“”和慢時間維“”存在一定的耦合,不能通過簡單的二維快速傅里葉變換(fast Fourier transform,FFT)實現相參處理。為了處理掉這一項,引入了坐標變換式,即Keystone變換:

但Keystone變換并不適合于速度出現模糊的情況。當速度出現模糊時,f (1+)>1,令f 為模糊后的多普勒頻率,則

式中:f ∈[-0.5,0.5];為正數,表示模糊程度。如果只進行Keystone變換的話,則


3 基于Keystone變換的多普勒相位補償
假設兩部雷達發射信號的載頻、PRI分別為和,和,并且其f 都相同,則在快頻率-慢時間域可以表示為


以往文獻為了將兩段頻譜互相干,往往只是乘以一個e ,e 是為了補償f ,e是為了補償其余的相位因素,其中,通常被稱為固定相位。此處已經假設了f 相同,所以可以暫時不考慮。用Δ來表示目標在兩部雷達回波中的多普勒相位差異,則Δ可具體表示如下:

對于不同的,Δ往往是不同的,即使忽略距離徙動因素1+,有

也可以看出對于不同速度的目標,由于信號載頻和PRI的不同,導致需要補償的相位是不同的,不能一概而論。為了可以對不同速度目標的多普勒相位統一補償,在無速度模糊的情況下可以對式(12)使用式(9)的坐標變換,而對(13)使用坐標變換。

這樣就可以以信號1為基準將不同速度目標的多普勒相位統一補償;要注意,應以無模糊間隔大的信號為基準進行補償。與原始的Keystone變換不同,新引入的變換式(16)考慮了脈沖的PRI,也正是因為加入了PRI才能使得兩部雷達回波信號中的多普勒相位補償一致。文獻[15-17]為了補償兩部雷達回波中與速度有關的相位差異,都是先對速度進行估計再進行補償,這個思路對多目標不合適。而本文將與速度有關的相位差異歸結為多普勒相位差異,新的變換可以在速度未知的情況下對多目標的多普勒相位進行補償。
當存在速度模糊時,在Keystone變換和多普勒相位補償后,兩個信號的多普勒如下所示:
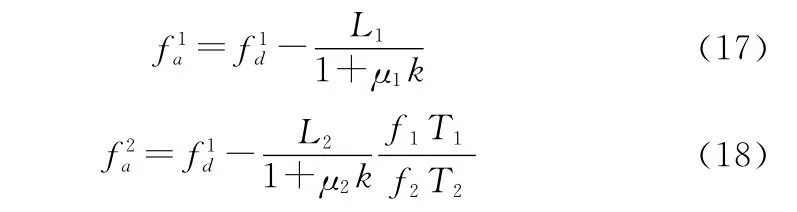
為了對應實際的模糊后的多普勒,需要分別予以/(1+)和[/(1+)]·[/]的補償;這里區分和是因為同一目標在兩部雷達信號回波中的模糊程度不同。
4 處理流程
圖2是兩部雷達信號多頻帶相參處理的流程,IFFT表示逆FFT(inverse FFT)。該處理流程可以很容易拓展到多部雷達信號的情況,下面對關鍵步驟作簡要說明。
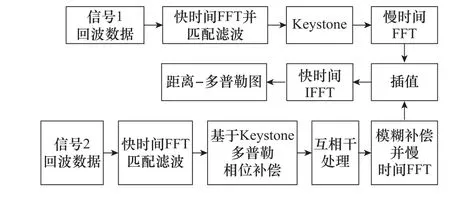
圖2 信號處理流程Fig.2 Signal processing flow
4.1 數據接收

4.2 匹配濾波
在頻域進行匹配濾波后,由于信號本身的譜往往是有起伏的,體現在

有時為了消除這種起伏帶來的影響,可以除以|()|最終得到式(4)。對于LFM信號,當時寬帶寬積較大時,可以忽略|()|,認為其近似為常數。
又由于采樣頻率F往往大于信號帶寬,頻域上有一些點是不在信號帶寬范圍內的,可以直接不使用,即省去?[-,]的點。有些信號,例如LFM 信號,在其頻譜邊緣會出現Gibbs現象,在頻域取點時需要省去出現Gibbs現象的點,以免其對插值過程產生影響。例如圖3是LFM信號的頻譜,取數據時應取紅框中的數據,避開出現Gibbs現象的位置。
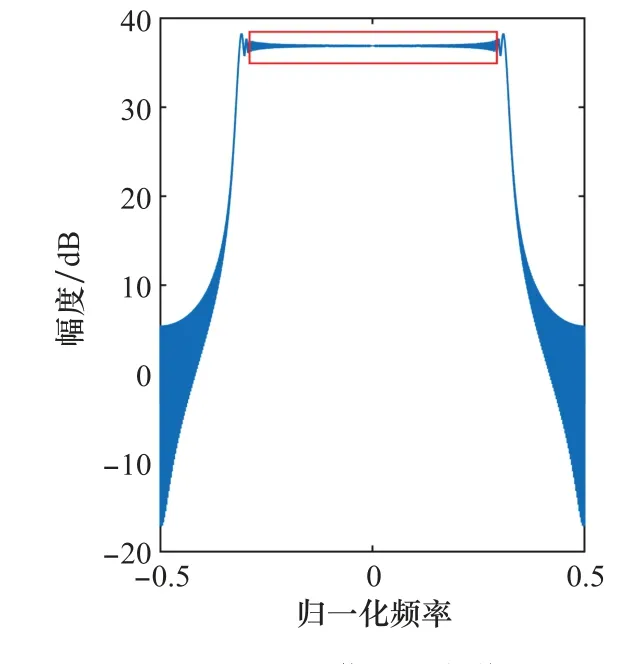
圖3 LFM信號幅度譜Fig.3 Amplitude spectrum of LFM
4.3 互相干處理
互相干處理在此指的是補償不同信號之間的線性相位、固定相位以及幅度,關于互相干處理的方法可參考[1,8-13];因為多普勒相位補償是單獨對信號2在慢時間維進行處理,其他相位和幅度差異的補償在慢時間維的數據上表現為乘以一個復常數,不影響該處理,所以本文只考慮多普勒相位的差異,仿真時假設不存在線性相位、固定相位以及幅度的差異。
4.4 插值
當兩段頻譜沒有重合部分時,需要對其缺失部分進行插值。首先,插值之所以放在“慢時間FFT”之后,是因為“慢時間域”變換到了“慢頻率域”,而“慢頻率域”其實是多普勒維,在多普勒維度上可以將低速干擾和高速目標分開,這樣在進行頻譜外推時可以減少非目標成分的干擾。插值的方法有很多種,例如基于有理譜模型的方法,基于狀態空間模型的方法,基于非參數自適應濾波器組的方法,以及基于稀疏重構的方法。本文采用基于自回歸模型(autoregressive model,AR)的方法,關于AR模型參數估計的方法有很多,推薦使用Burg算法,Burg算法計算效率高,保證外推系數的穩定性,即沒有極點位于單位圓之外,而且對噪聲更不敏感;AR模型的階數一般選擇小于/3,但對于低信噪比的信號需要更高的階數。
5 仿真
5.1 單目標
仿真生成參數不同的LFM信號的回波來模擬不同雷達信號的回波,參數如表1,回波脈沖數為128,信噪比(signal to noise ratio,SNR)為-15 dB,SNR定義為10lg(/),其中,是信號的幅度,是噪聲方差。并且以下仿真中在快時間維和慢時間維都沒有加窗來降低旁瓣。
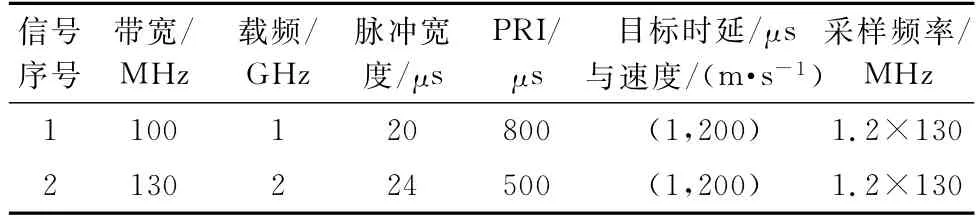
表1 單目標參數Table 1 Single target parameters
圖4(a)和圖4(b)分別是信號1和信號2經過傳統相參積累(包括了Keystone變換)的結果,可以看出,由于載頻和PRI的不同,兩者的峰值不在同一距離多普勒單元,分別處在(83 Hz,150 m)和(666.7 Hz,150 m),因此無法在同一多普勒單元上通過插值來實現相參處理,因為此時同一多普勒單元對應著不同的目標速度。圖4(c)是以信號1為基準,對信號2進行多普勒相位補償之后的距離 多普勒圖,可以看出其目標多普勒變為83 Hz,與信號1的距離 多普勒圖中的目標多普勒一致,說明多普勒相位已經得到補償,即同一運動目標在兩個距離 多普勒圖中處在同一多普勒單元;在此基礎上,可進一步進行相參處理。圖4(d)是頻帶相參處理后的結果,可以看出距離分辨率有明顯的提升,間接說明了信號2的多普勒相位已經調整的和信號1的一樣。
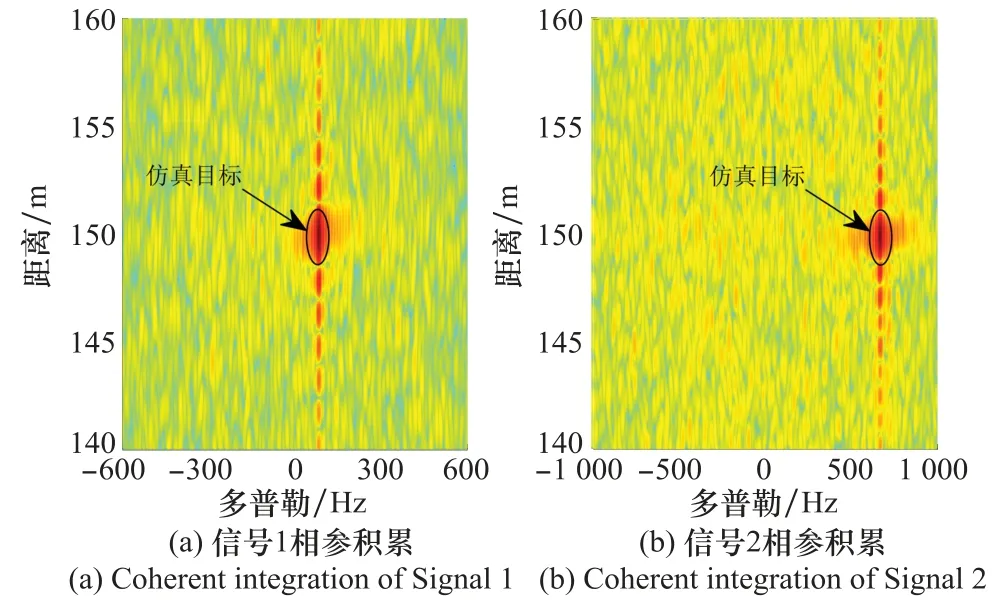
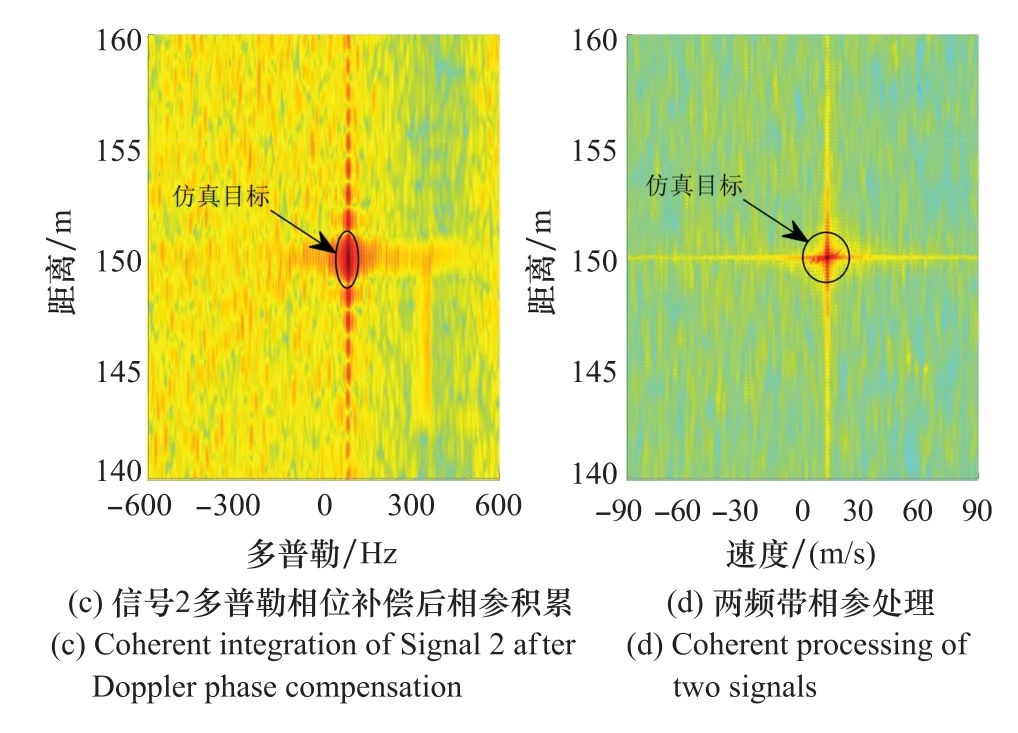
圖4 單目標仿真Fig.4 Single target simulation
5.2 多目標
仿真生成參數不同的LFM 信號的回波,參數如表2,回波脈沖數為128,SNR為-15 d B;=0.8/,這樣傳統相參積累在距離向是分不開兩個相近目標的。
表2 多目標參數Table 2 Multi-target parameters
圖5(a)和圖5(b)分別是信號1和信號2經過傳統相參積累(包括了Keystone變換)的結果,可以看出由于多普勒相位沒有補償,目標處于不同的多普勒單元上,而且不能夠將相近的目標區分開,3個目標在信號1和信號2的距離-多普勒圖中所處的距離多普勒單元分別為(83 Hz,150 m)和(666.7 Hz,150 m),(83 Hz,150.9 m)和(666.7 Hz,150.9 m),(-250 Hz,154.6 m)和(0 Hz,154.6 m);圖5(c)是以信號1為基準,對信號2進行多普勒相位補償之后的距離 多普勒圖,可以看出3個目標的多普勒與圖5(a)信號1中的一致,說明多普勒相位已經得到補償,在此基礎上,可進一步進行相參處理。圖5(d)是頻帶相參處理后的結果,距離相近的兩個目標被區分開來,說明頻帶相參處理提高了分辨率,進而間接說明了信號2的多普勒相位已經調整得和信號1的一樣。
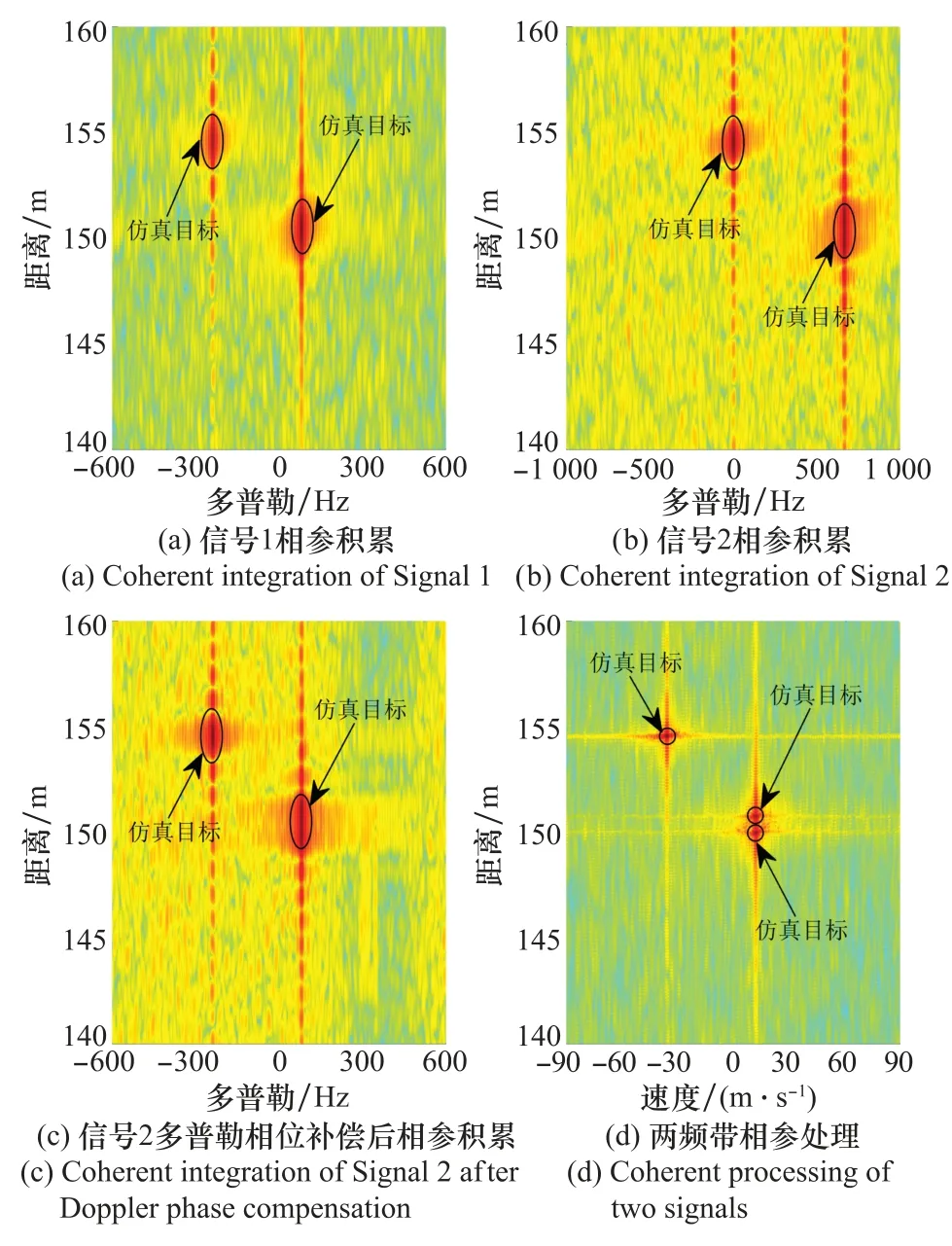
圖5 多目標仿真Fig.5 Multi-target simulation
5.3 半實測半仿真
經過外場試驗測得一組帶有動目標的單頻帶實測數據,所測得的動目標為民用飛機,距離約56 km。利用已有的單頻帶實測數據,仿真生成與其對應的另一頻帶模擬回波數據,模擬回波數據中目標的距離與速度從實測數據中估計得到,所添加的高斯白噪聲方差也是利用實測數據估計得到的,并進一步調整模擬回波數據中信號回波幅度的大小,使其相參積累后的SNR與實測數據基本一致;其他相關參數如表3所示,由于保密需求,信號的真實參數用符號代替。
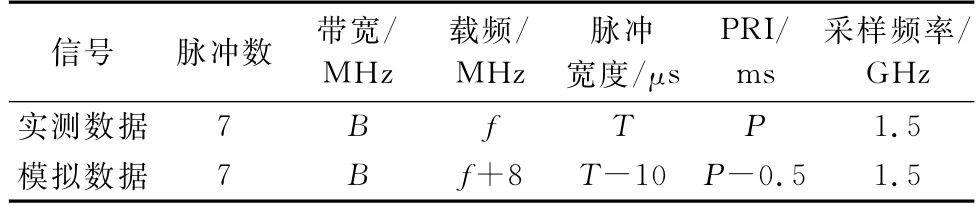
表3 實測數據與模擬數據的參數Table 3 Parameters of measured data and simulated data
對實測數據和模擬數據分別在不使用本文多普勒相位補償方法和使用本文多普勒相位補償方法的情況下進行多頻帶相參處理,結果如圖6所示,可以看出,使用本文方法可以在目標所在位置積累出更窄的峰值。圖7是目標所在位置的距離維曲線,可以看出,通過利用AR模型對頻域數據進行有效外推可以提高距離分辨率,但在進行多頻帶相參處理時,如果不使用本文多普勒相位補償方法距離分辨就無法得到有效提高,這說明多普勒相位補償的必要性以及在該場景下本文所提方法的可行性。
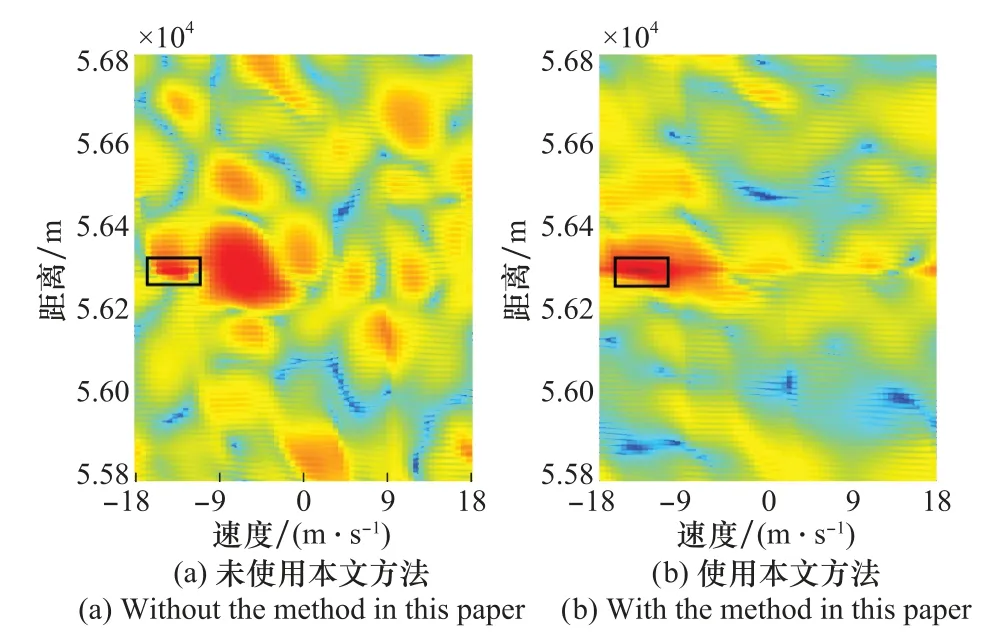
圖6 半實測半仿真結果Fig.6 Semi-measured and semi-simulation result
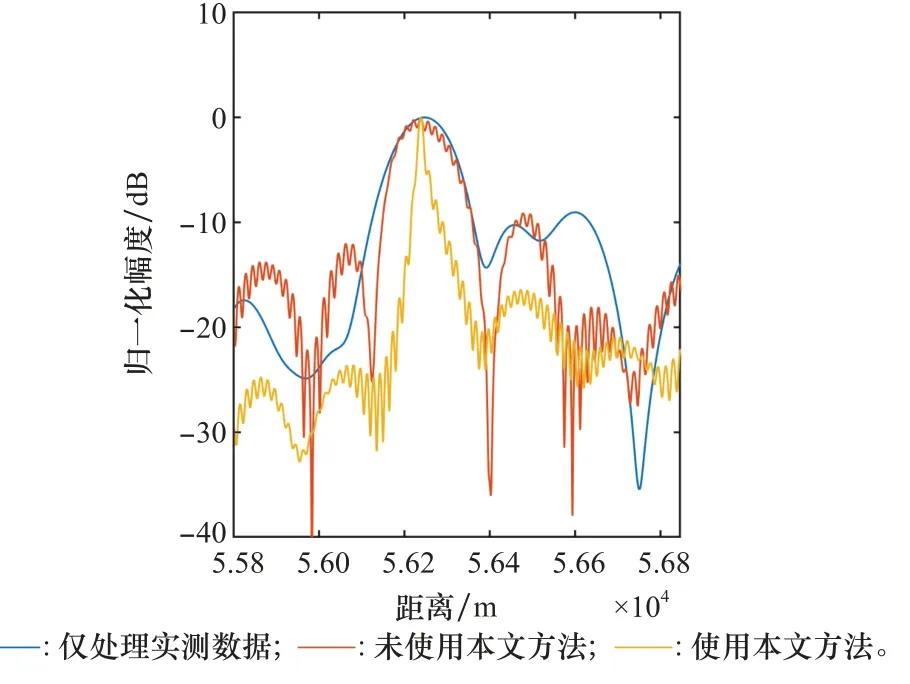
圖7 距離維對比Fig.7 Contrast in range dimension
6 結 論
多頻帶相參處理可以應用于雙/多基雷達的目標測距和成像領域,其關鍵技術是互相干處理,互相干處理是為了補償子頻帶之間的相位差異,其中就包括多普勒相位差異。本文在兩部脈沖雷達發射信號載頻、PRI不同的場景下,針對不同載頻、PRI導致同一動目標在兩部雷達的回波中的多普勒相位不同,影響多頻帶數據之間相參處理的問題,提出一種基于Keystone變換的多普勒相位補償方法,該方法可以在距離徙動校正的同時以及速度未知的情況下完成多目標多普勒相位補償,為多源多頻帶場景下的多目標信號互相干處理提供了一種新的途徑。通過單目標及多目標場景的仿真以及半實測半仿真實驗,驗證了該方法可以在速度未知的情況下對多普勒相位進行補償,補償后的信號可以進一步相參處理,提高分辨率。
猜你喜歡
音樂探索(2022年2期)2022-05-30 21:01:37
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
