基于核Fisher判別的群結構更新模型及群目標跟蹤算法
2022-10-10 08:13:08劉浩楠宋驪平
系統工程與電子技術 2022年10期
劉浩楠,宋驪平
(西安電子科技大學電子工程學院,陜西 西安 710071)
0 引 言
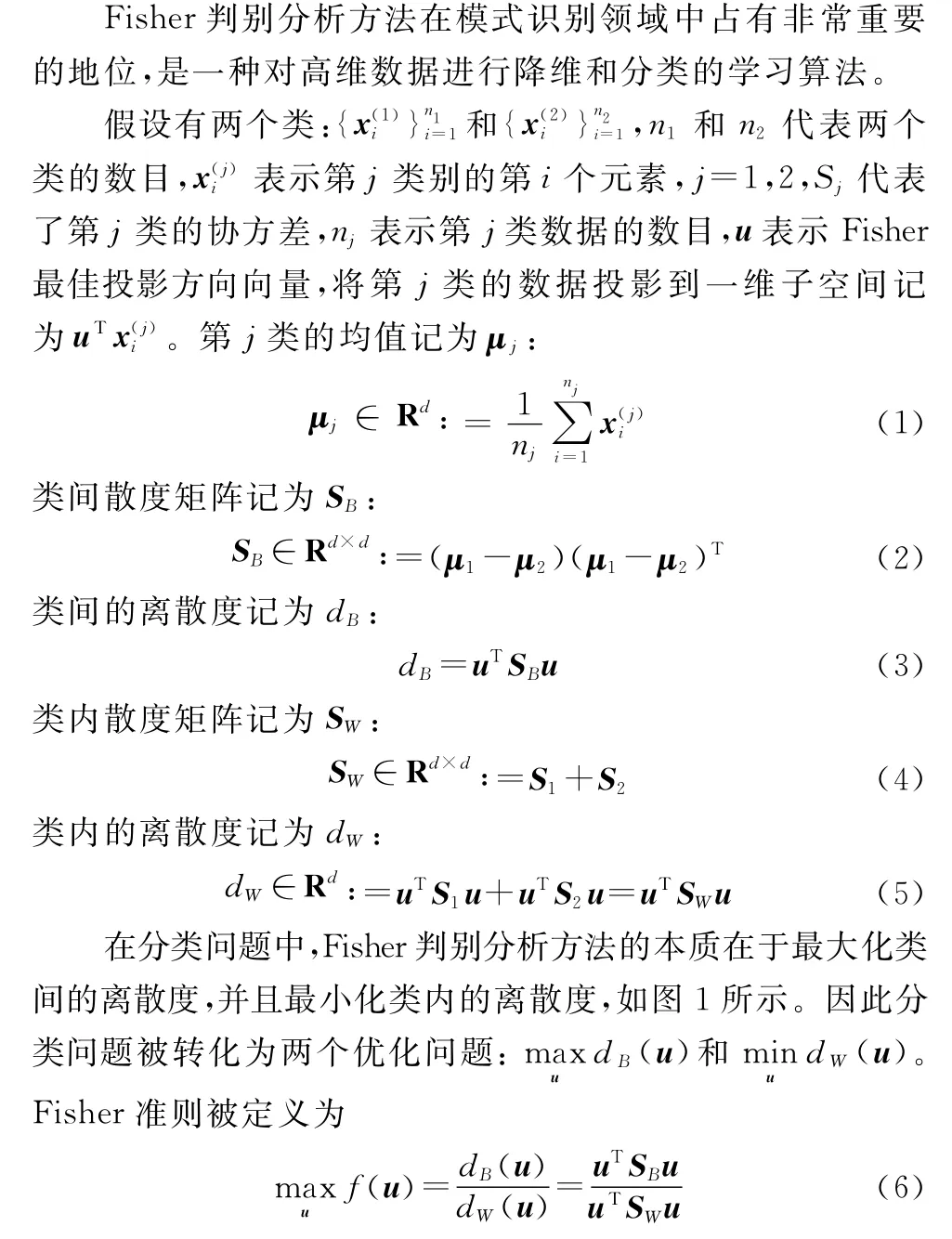
隨著目標跟蹤領域的持續發展,針對不同場景下目標跟蹤問題的研究也越來越深入。雜波環境下數目未知且時變的多目標跟蹤問題是近年來的研究熱點。因此,基于隨機集的方法已成為多目標跟蹤的主流方法,例如概率假設密度(probability hypothesis density,PHD)濾波 器[1]等。文獻[2]提出的高斯混合概率假設密度(Gaussian mixture PHD,GM-PHD)濾波器,能夠實現線性高斯條件下的多目標跟蹤。文獻[3]提出的序貫蒙特卡羅PHD(sequential Monte Carlo PHD,SMC-PHD)濾波器,可以解決非線性的多目標跟蹤問題。在此基礎上,文獻[4]提出的箱粒子概率假設密度(box particle PHD,BP-PHD)濾波器,在保證濾波性能的同時,解決了因粒子數目過多導致的計算時間過長的問題。當多個目標聚集在一起,其運動具有相似性,對外表現出群組運動特征時,常常稱為群目標,例如無人機集群、艦艇編隊等。對于這樣的群組目標,有時雷達分辨力并不足以分辨其中的每個個體目標,因此需要將其作為一個整體看待,有時即使可以分辨,也沒有必要將其分開。例如,對于火力打擊來說,在某些情況下將其看作一個整體來跟蹤也是合理的。因此,近年來對群目標跟蹤的研究也已成為一個熱點問題。文獻[5]將群目標分為可分辨群目標和不可分辨群目標。群目標跟蹤的提出打破了傳統跟蹤中目標與量測一一對應的假設,具有態勢認知能力[6-7]。對于多個群目標,根據其密集程度,只需要通過跟蹤群的質心,就可以完成對多個群目標的跟蹤,除了跟蹤群中心,有時還需要考慮群的輪廓問題。文獻[8]提出使用高斯過程方法對群/擴展目標的擴展形態進行建模。在群目標跟蹤中,還需要考慮群的劃分,以及群演化過程中的分裂與合并等問題,稱之為群結構的建模和更新,具有十分重要的意義。
21世紀初期,Gning等[9-10]對蒙特卡羅方法的粒子濾波實現方式進行了進一步的優化和完善,并且提出了群演化網絡模型[9]來對群數目估計和群結構更新,推動了群目標跟蹤領域的迅速發展,基于群演化網絡模型的群目標跟蹤算法不斷涌現[11-13],已成為群結構建模的主流方法。群演化網絡模型通過計算目標間的馬氏距離與預設閾值進行比較來完成分群操作,但群演化網絡模型中閾值需要人為設置,效率較低。
近年來,隨著機器學習的快速發展,機器學習算法和思想應用到了各個領域。機器學習的第一次出現是在20世紀50年代,通過訓練樣本歸納出學習結果,且機器學習算法大多都不需要人為干預。本文將機器學習思想應用到群結構建模中,提出了一種基于核Fisher判別分析(kernel Fisher discriminant analysis,KFDA)的群結構更新模型,KFDA是一種常用于模式識別領域的有監督的機器學習算法[14-16],從帶有標簽的訓練集中進行學習,得到一個分類模型,輸入新數據時通過此模型來推測新實例的所屬標簽。群結構更新問題可以看作一個二分類問題,即能夠組成一個群的目標為一類,不能的則為另一類,通過數據訓練可得到符合分群特性的群結構模型。與群演化網絡模型相比,KFDA不再單一地依靠閾值來更新群結構,而是通過數據訓練出來的模型更新群結構,無需人為干預,當然在實際的作戰系統中可以考慮保留人工干預通道。對比實驗表明,在相同濾波條件下,所提算法比群演化網絡模型跟蹤效果更好,群數目估計也更準確。
1 理論基礎
1.1 Fisher判別分析
1.2 核KFDA判別
Fisher判別分析方法適用于訓練數據為線性可分的情況,當處理高維不可分的數據時,Fisher判別方法表現就遠遠不如處理線性可分數據。因此,Mika等[17]提出將核函數引入Fisher判別分析方法中來解決這個問題,使其性能大大提升。
KFDA方法首先將原始數據通過特征空間進行高維映射,把非線性數據間接地轉換為線性數據,在特征空間內提取特征,轉換示意圖如圖2所示。
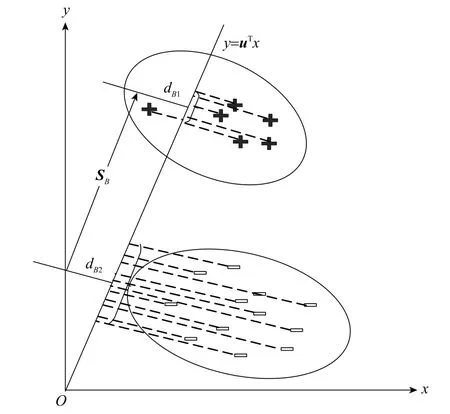
圖1 FDA示意圖Fig.1 FDA schematic diagram
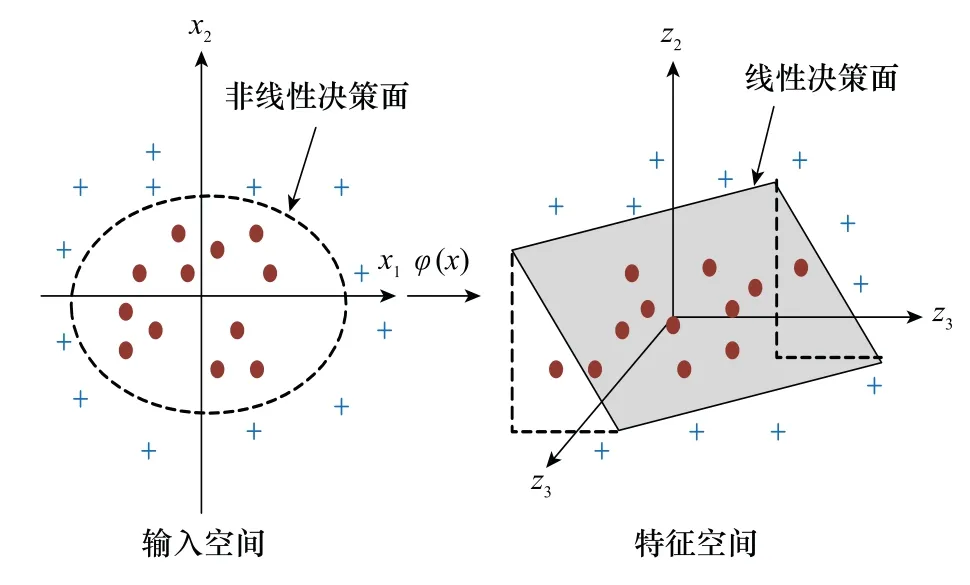
圖2 KFDA模型轉換過程Fig.2 Transformation process illustration of KFDA model
因核函數不能直接計算,引入函數φ,功能是將數據x映射到希爾伯特空間(特征空間)H,即x→φ(x),φ(x)∈H。令t表示特征空間的維數,那么有φ(x)∈Rt,當x∈Rd時,t?d。
兩個向量x1和x2的核函數就定義為

第j類樣本在特征空間H中經過映射后的均值記為φ(μj):

式中:I為單位矩陣;1為全1向量。
在特征空間H中,令θ=wφ,Fisher判別準則為

通過數據的不斷訓練得到符合核Fisher判別準則的wφ。
1.3 群演化網絡模型
群演化網絡模型用來建模群目標隨時間的演化[9],是一張由頂點與邊構成的圖,隨著時間不斷更新,頂點表示目標,邊表示目標間的關系。群演化網絡模型主要由邊的更新、新節點的加入和節點的消亡這幾部分組成。
1.3.1 邊的更新
假設已知有N個目標,且構成了頂點集合V={v1,v2,…,v N},計算任意兩個頂點之間的馬氏距離,與根據先驗知識所預設的閾值進行比較,若所得馬氏距離小于預設閾值,則兩個頂點間使用邊連接,記為E(i,j)=(v i,v j),認為其同屬于一個群[9-10],通過每一時刻對邊進行更新得到當前時刻的群結構信息。因群目標跟蹤中涉及目標數目過多,計算邊的更新時運算量會很大,所以文獻[10]提出以前一時刻的子群中心代替子群內所有目標,形成了一個新的節點集合,從而得到了一個新的群結構,在新的群結構中,只對相鄰子群內的節點進行群劃分,避免了不相關節點的計算,提高了計算效率。群劃分操作示意圖如圖3所示,邊的更新示意圖如圖4所示。
圖3 群劃分Fig.3 Group division
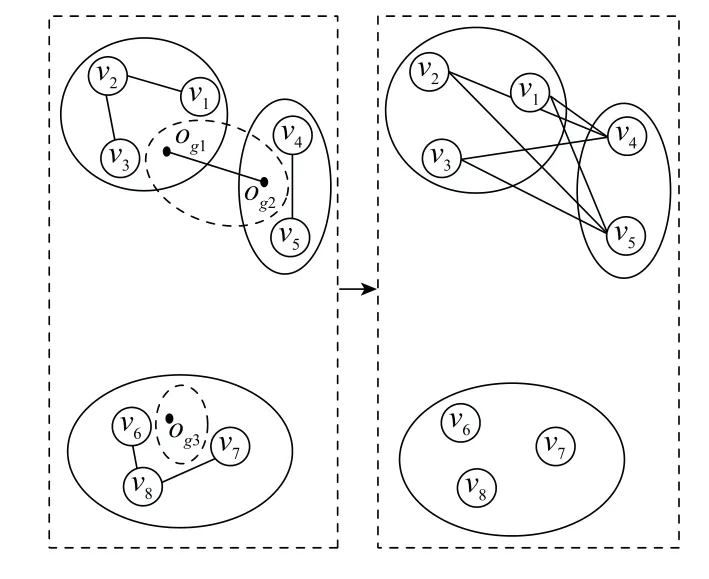
圖4 邊的更新Fig.4 Update of edge
1.3.2 新節點的加入
當有新節點加入,目標數目變多時,需要多次計算馬氏距離,為了減少計算量,參考邊的更新時所使用的方法,以子群中心代替子群內所有目標,只需要計算子群中心與新節點間的馬氏距離,如果滿足條件,則把新節點劃分到對應的群中,否則新節點單獨成為一個群。新節點加入的示意圖如圖5所示。
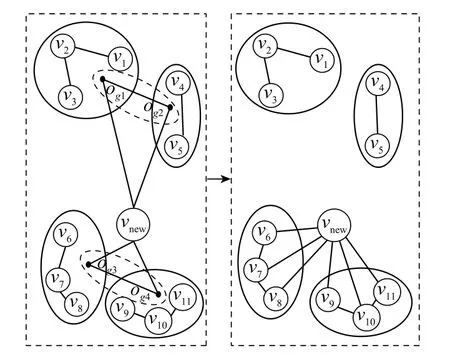
圖5 新節點加入Fig.5 Adding new nodes
1.3.3 節點的消亡
當一段時間內,模型中獲得的量測信息沒有關于某一個節點的信息,那么這個節點就會被認為是一個死亡或者消亡目標所對應的節點,通過移除與其相關的邊的信息的方式來刪除該節點。
1.4 箱粒子濾波
箱粒子濾波是一種基于區間分析的濾波算法,使用區間變量代替點變量。箱粒子的提出有效解決了粒子濾波所需粒子數過多,計算量過大的問題,也可以借助區間分析解決實際場景中量測的不確定性問題[12],近年來也常用于群目標跟蹤領域。
箱粒子濾波采用大小可控的箱粒子去替代傳統粒子濾波中的點粒子,最大限度擬合目標的后驗概率密度。
在實際的跟蹤環境中,目標和量測都具有不確定性,因此目標的狀態集合與量測集合表示為兩個隨機有限集:

式中:N k為k時刻目標數目;x k,i,z k,i分別代表k時刻第i個目標的狀態和量測向量;F(χ),F()分別代表目標的狀態空間和量測空間。
因箱粒子濾波采用區間分析的方法,所以在箱粒子濾波中的量測集合表示為

式中:[·]表示區間;F(IZ)表示觀測空間;Mk表示k時刻觀測到的目標數目。箱粒子濾波的具體算法流程參見文獻[18],限于篇幅,此處不再贅述。
2 基于KFDA的群結構更新模型
傳統的群結構更新模型,例如群演化網絡模型,如第1.3節所述,需要根據先驗知識去設置閾值來對群結構進行更新,對群數目的估計依賴于閾值的選取,閾值的選取對群跟蹤精度影響較大。本文提出將KFDA方法應用于群結構更新中,通過訓練數據進行訓練,得出符合要求的分群模型。在KFDA中把群結構更新問題看作一個二分類問題,一類為目標能夠分為一個群,另一類為目標不能分為一個群。訓練數據集形式如下:

式中:j為目標標簽,或者將目標看作樣本時稱為樣本標簽,n j為第j個標簽下的樣本數量。為了提高模型的泛化能力,使正負樣本個數相同。
假設[p1,p2,…,p m]∈G,[q1,q2,…,q s]?G,m和s為目標個數,p和q代表目標狀態向量,|·|表示取絕對值,則

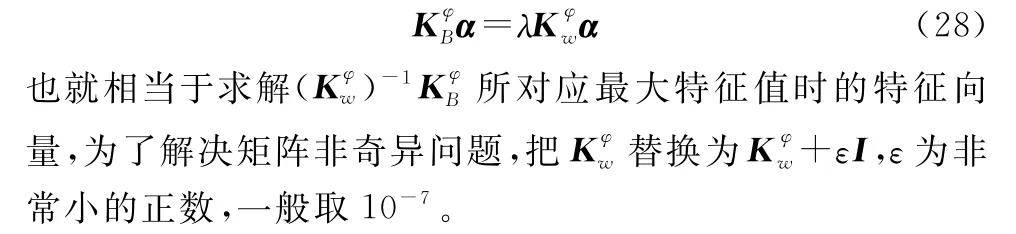
KFDA判別需要通過和來找到使KFDA準則最大的特征向量wφ,在Fisher判別分析中,如果已經給定了訓練數據集,那么S B和S W能夠被確定,接下來只是讓廣義Rayleigh Ritz商最大化的過程[19]。但是在KFDA中,根據核函數的特性可知,wφ不能直接計算出結果,所以需要把wφ寫成另一種表現形式:
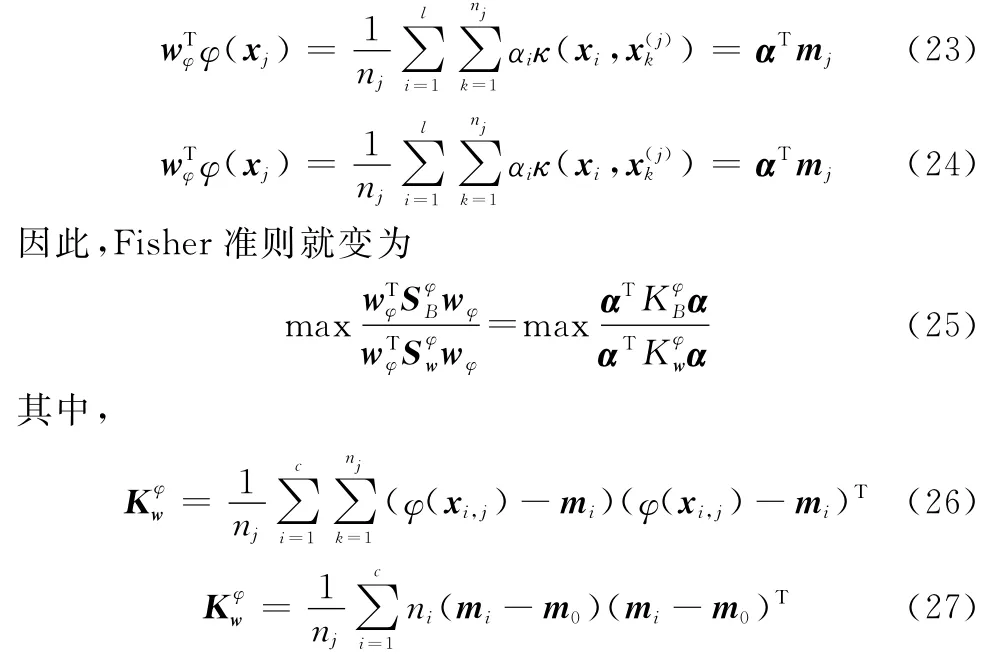
這樣求解投影最佳方向向量wφ就轉換為求解列向量α的問題,可以等價于求解廣義特征方程:
通過給定帶有標簽的數據集,計算出訓練樣本和特征參數的關系,得到訓練好的群結構模型,在群目標跟蹤過程中,當輸入的數據預測標簽為Group時才劃分為一個群,否則不能分為一個群,因此只需要預測標簽就可以完成群目標跟蹤中對預測量測數據的分群操作。
3 基于KFDA群結構模型的群目標跟蹤算法
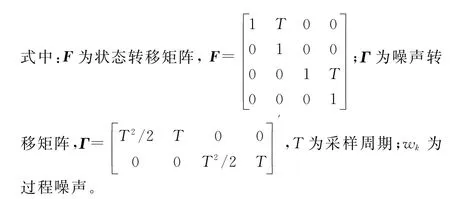
3.1 目標運動模型
假設群內各個目標的運動模型為CV模型[20],目標狀態方程為

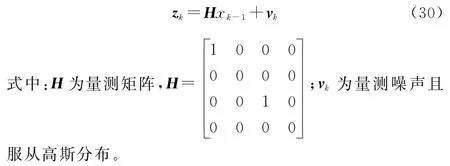
3.2 目標量測模型
假設目標量測空間Z∈Rz,則k時刻的目標量測方程可以表示如下:
3.3 算法流程
本文采用KFDA群結構更新模型來更新群結構,同時采用箱粒子PHD濾波來跟蹤群目標。本文提出的算法整體思想為:通過箱粒子PHD濾波獲得目標預測量測,再通過KFDA群結構更新模型來實時更新群結構信息。
3.3.1 箱粒子初始化
初始化過程中,箱粒子集合由存活箱粒子和新生箱粒子兩部分組成,即

式中:w表示權值;N k-1為k時刻存活粒子數;N k,new為k時刻新生粒子數;k時刻的箱粒子總數為N k=N k-1+N k,new。
3.3.2 預測
預測目標狀態為

其中:[f k|k-1]為包含函數;PrS,k為k時刻目標存活的概率。
3.3.3 更新
k時刻箱粒子權值更新為

式中:PrD,k為檢測到目標的概率;λ為雜波數。
3.3.4 重采樣
箱粒子濾波與粒子濾波相似,隨著濾波次數的增加會存在著粒子退化問題,為了解決退化問題和保持箱粒子的多樣性,要對其進行重采樣操作,重采樣時采用隨機子劃分的重采樣方法,為保證其多樣性,在預測步中,根據上一時刻的量測狀態信息實時補充新的箱粒子。
3.3.5 群結構信息更新和反饋
對重采樣后的箱粒子集提取目標狀態,將提取到的結果送入到訓練好的KFDA群結構模型中,通過預測標簽來完成分群操作,繼而得到k時刻更新后的群結構信息G k,通過Gk來對箱粒子集中屬于同一個子群的目標狀態進行修正,并使子群內的速度統一,完成群結構信息反饋,得到包含新的群結構信息的箱粒子集。
3.3.6 獲取目標狀態
由于箱粒子采用了區間分析的方法,因此為了得到目標的狀態信息對箱粒子集進行點化操作,使用箱粒子區間狀態的中心代替整個箱粒子,最終獲得目標的狀態估計信息:

式中:mid(·)表示取箱粒子的中心點。根據群數目估計結合當前目標的狀態估計結果進行k-means聚類,得到當前時刻的群中心。
4 仿真實驗與結果分析
為了驗證本文所提出的群結構模型在群結構更新時的有效性,設計了在箱粒子PHD濾波環境下基于KFDA的群結構模型與群演化網絡模型的對比試驗,使用群數目估計和最優子模式分配(optimal sub-pattern assignment,OSPA)距離以及群結構的不確定性估計來作為兩種模型的評判標準,仿真實驗設備為Intel(R)Core(TM)i7-10700,CPU3.80 GHz,Matlab2011。
仿真場景為一個大小[±600 m×±600 m]且伴有隨機分布噪聲的區域。區域內有8個目標,總運動時長為40 s,目標運動中伴有群的分離和合并,采樣間隔T=1 s,箱粒子數目N=25,過程噪聲w k和量測噪聲v k的標準差分別為δw=[0.05,0.05];δv=[2.5,2.5],箱粒子的區間長度為[14,24],存活概率PrS,k=0.99,雜波數量r=2,OSPA距離參數p=2,c=70,目標運動方程和量測方程如式(31)和式(32)所示。
8個目標的位置和速度信息如表1所示,~表示在當前時刻目標運動方向發生改變時所對應的位置信息。
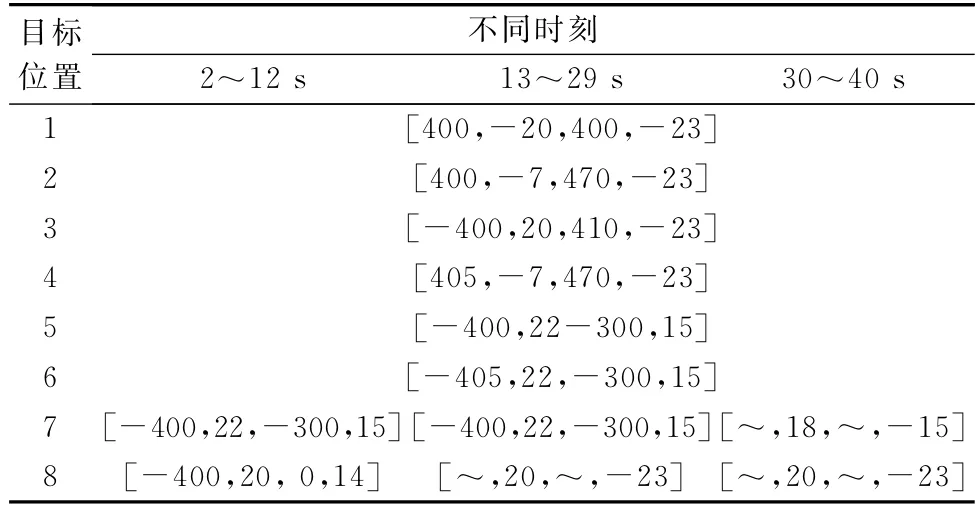
表1 目標真實運動狀態Table 1 True states of the targets
目標真實運動軌跡如圖6所示,在二維平面上,兩種算法的單次蒙特卡羅仿真的跟蹤結果如圖7所示。在圖6中,目標的真實運動軌跡用黑色實線表示,“·”表示真實群中心,藍色的“⊙”表示目標運動起始位置,“→”表示目標運動方向,并給出了8個目標所對應的標簽。
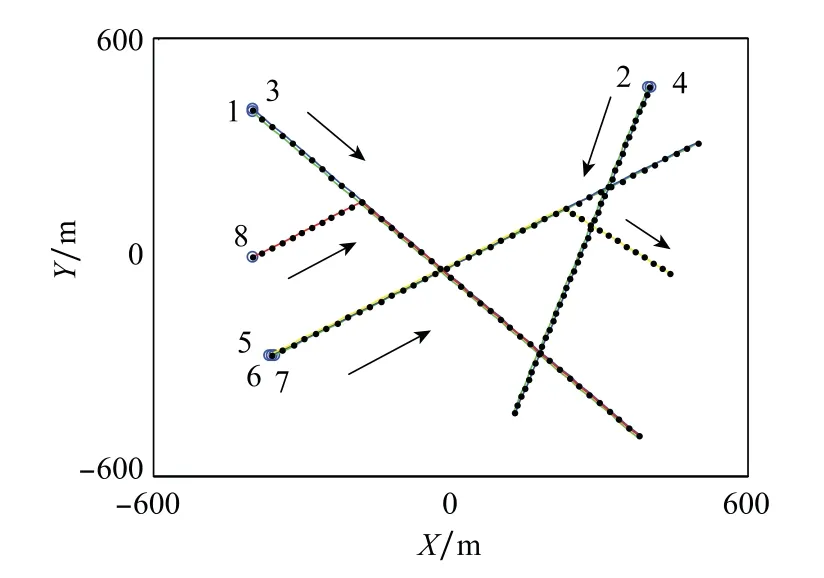
圖6 目標真實運動軌跡Fig.6 True trajectories of targets
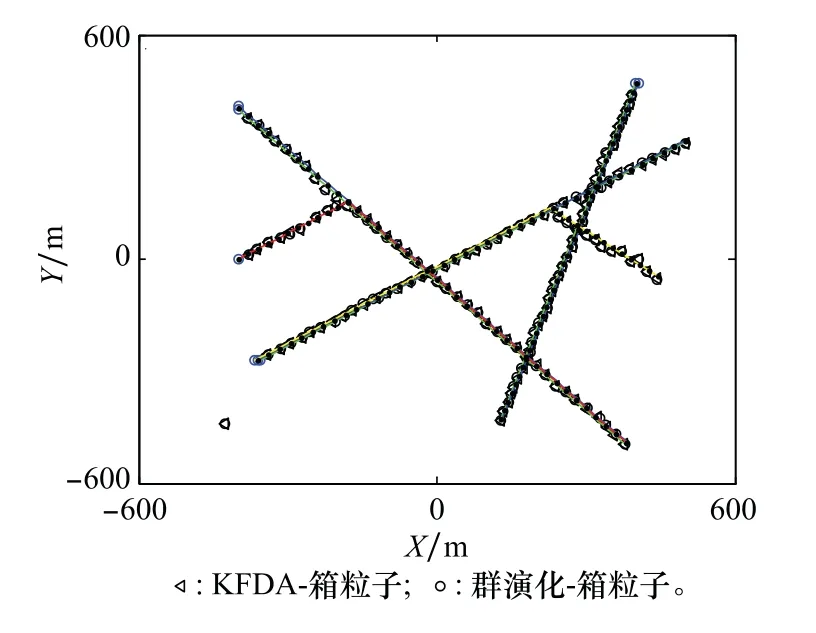
圖7 跟蹤結果Fig.7 Tracking results
為了更好地驗證兩種模型的性能,進行了50次蒙特卡羅仿真取其平均值來觀察運行結果,群數目估計結果和OSPA距離如圖8和圖9所示。

圖8 群數目估計結果Fig.8 Group number estimation
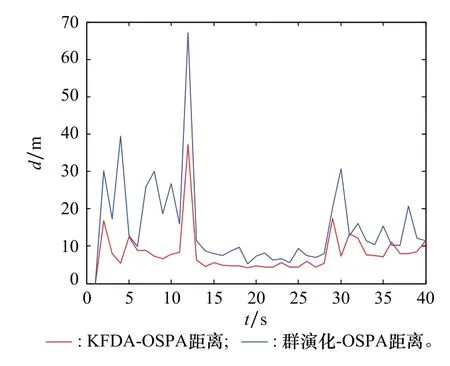
圖9 OSPA距離Fig.9 OSPA distance
由圖8可以看出兩種模型在群數目估計方面都較為準確,但是兩者對比來看,通過數據訓練出的群結構模型比群演化網絡模型在群數目估計方面更穩定,波動幅度更小,全局適應能力更強,且不需要人為干預,模型訓練好后,可直接使用。而群演化網絡模型中群數目估計效果依賴于閾值的設置,而且設置閾值需要不斷嘗試,最終才會找到一個比較合適的值,效率比較低。由圖9可見,基于KFDA群結構模型的箱粒子PHD濾波器在整個跟蹤過程中的OSPA誤差要小于基于群演化網絡模型的箱粒子PHD濾波器,可見KFDA群結構模型對群數目估計更準確,跟蹤誤差更小。
圖11和圖12分別給出了群演化網絡模型和KFDA的群結構更新模型對群結構的不確定性估計。群結構的不確定性估計是將群的結構Gt作為目標狀態的一部分,形成擴展狀態(X t,Gt),然后通過每個粒子包含的目標狀態信息來估計對應的群結構,再將粒子的權重作為對應群結構的出現概率[8-9]。群結構估計圖給出了估計群結構的概率分布,提供了群結構出現的概率信息,可以更好地反映出群結構內在的變化趨勢。對比圖10~圖12可以看出,兩種模型對于群結構的不確定性估計都基本符合真實群結構,可以給出群結構估計的概率,給定時刻顏色越接近紅色說明對該種群結構估計的概率越大。圖9~圖11中縱坐標所對應的群結構如表2所示。其中,索引1,3,5為真實的群結構劃分,其余為實驗中出現概率較高的錯誤群結構劃分,例如表中G5={(1,3,8),(2,4),(5,6),7}即為一種錯誤群結構,在真實的群演化中并未出現,但在估計中是有一定概率出現的,其真實群結構應為G3={(1,3,8),(2,4),(5,6,7)},出現類似錯誤的原因一方面是因為雜波影響,使濾波結果產生誤差,對群結構估計結果產生了影響,另一方面是由于模型的分群閾值并不能很好地適應全局,使一個群的目標被分為兩個或者多個群。對比圖11與圖12可以看出,兩者都出現了錯誤的群結構劃分,但基于核Fisher判別的群結構更新模型比群演化網絡模型對于群結構的不確定性估計要更準確,出現錯誤群結構的概率也要小于群演化網絡模型,說明通過數據訓練出的KFDA群結構模型比群演化網絡模型全局適應能力更強。
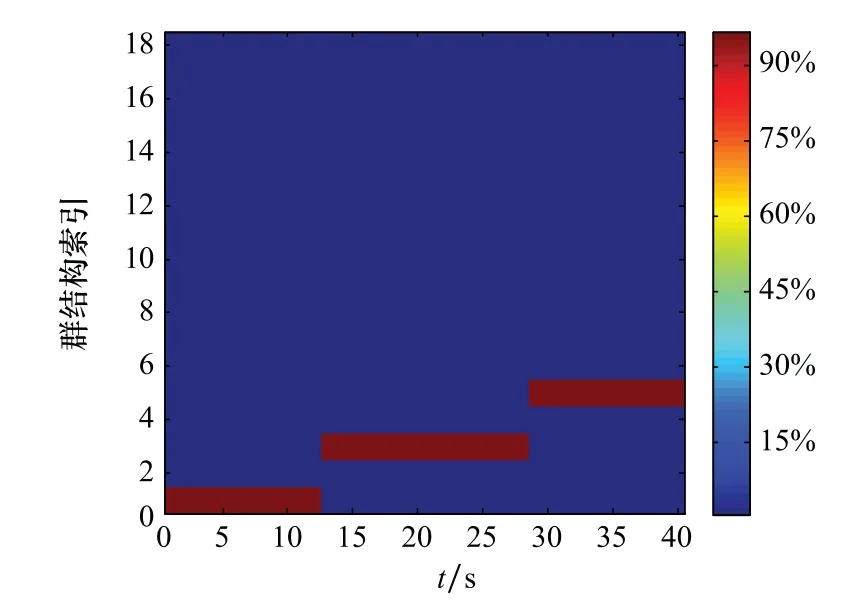
圖10 真實群結構Fig.10 True group structure
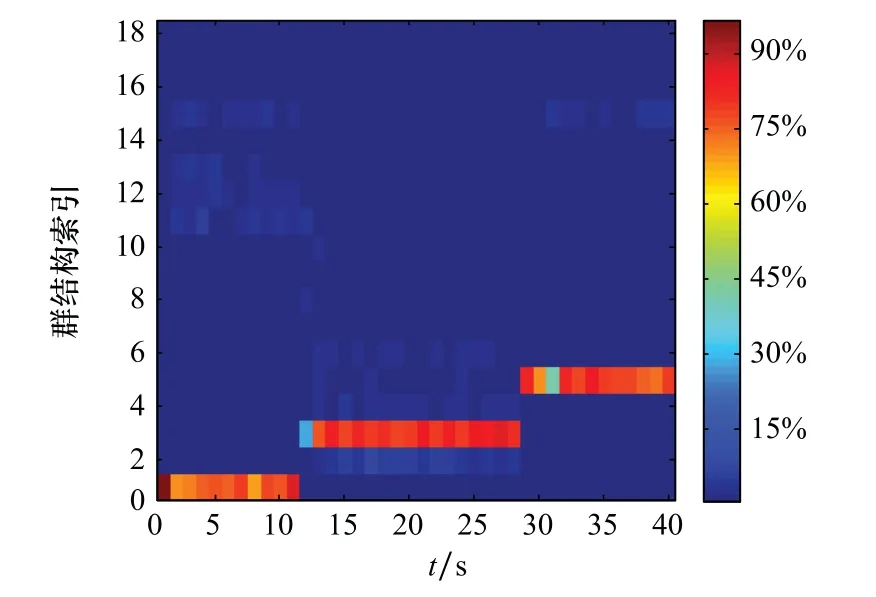
圖11 群演化網絡模型對群結構的不確定性估計Fig.11 Uncertainty estimation of group structure by group evolution network model
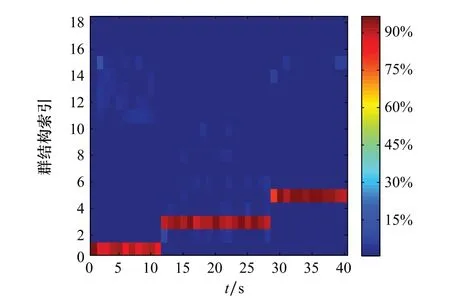
圖12 KFDA群結構更新模型對群結構的不確定性估計Fig.12 Uncertainty estimation of group structure by KFDA group structure update model
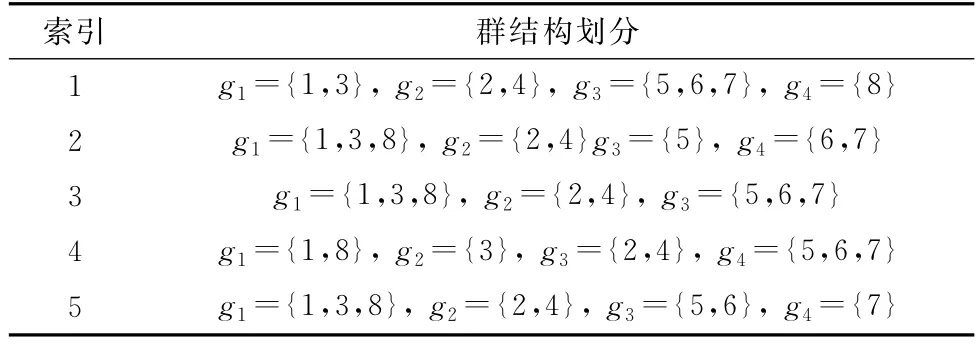
表2 群結構庫Table 2 Group structure library
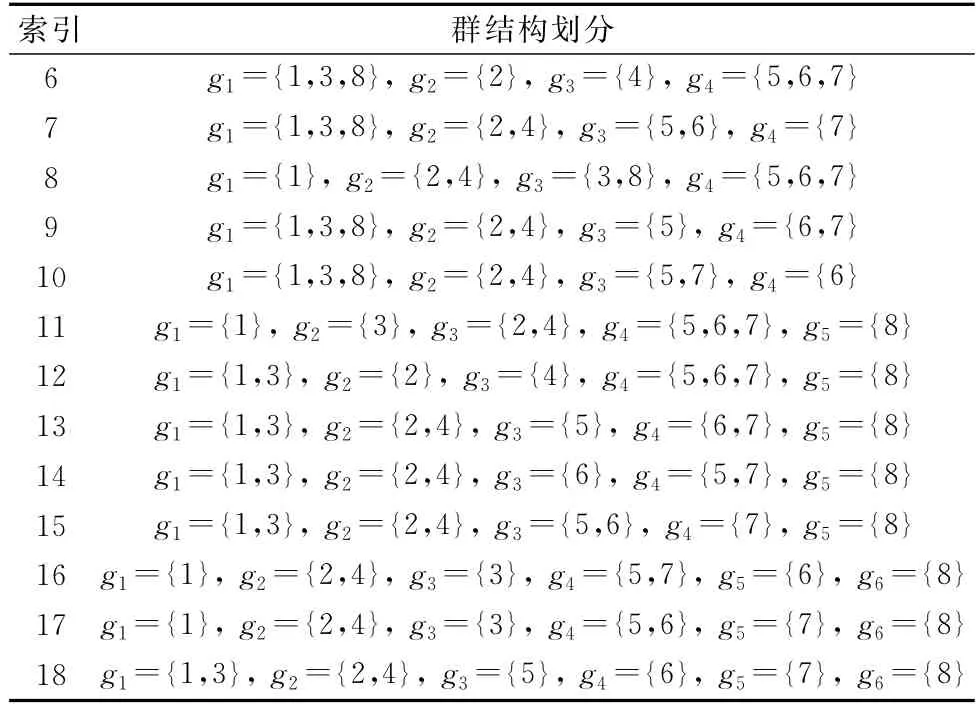
續表2Continued Table 2
5 結 論
本文將群目標跟蹤中分群的問題看作一個二分類問題,提出了一種KFDA的群結構更新模型,并基于該模型采用箱粒子PHD濾波實現了群目標的跟蹤,仿真實驗驗證了本文所提模型的有效性。其對群數目的估計更為準確,模型訓練后可直接使用,相比群演化網絡模型效率更高,全局適應能力更強。隨著機器學習的發展,將機器學習算法的一些理論和思想引入到目標跟蹤領域,可以幫助解決一些實際目標跟蹤中所遇到的問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50
