工業機器人伺服傳動系統對整機性能影響研究*
2022-10-11 06:15:38竇文娟王小平吳曾萍李本旺黃云峰
制造技術與機床 2022年10期
關鍵詞:模型
竇文娟 龔 偉 王小平 吳曾萍 李本旺 黃云峰
(①中國汽車工程研究院股份有限公司,重慶 401122;②成都飛機工業(集團)有限責任公司,四川成都 610073;③重慶凱瑞機器人技術有限公司,重慶 400799;④重慶大學機械傳動國家重點實驗室,重慶 400044)
工業機器人技術水平是衡量一個國家制造業水平和核心競爭力的重要標志[1],然而目前整機性能檢測的核心技術、測試設備仍掌握在瑞士、德國和日本等工業強國手中[2-3]。我國參考標準僅對機器人末端精度和通用安全進行規范,沒有涉及雙臂、移動和復合型機器人等特種機器人的性能參數指標,造成測評方式針對性不強、整機性能影響機理與評估方法缺失等問題,從而導致難以全面真實地反映整機性能。探索機器人核心部件及其組合驅動系統的性能,揭示核心部件對整機性能的影響機理[4],是開展整機性能測評的基礎。(1)研究減速器、伺服電機及控制器等核心部件的靜動態特性、壽命測試方法和性能退化評估方法與測試技術。(2)研究工業機器人伺服傳動系統多物理過程、多參數和多維機電耦合關系,建立動力學運行品質模型。(3)提出核心部件及其組合系統參數-整機性能測試方案,驗證核心部件之間機電耦合因素對整機性能的影響機理。
工業機器人技術是一個多學科、多領域高度交叉集成的技術高地。工業機器人核心部件是支撐機器人技術向高端智能化發展的重要基礎,其性能和質量直接影響對整機性能的可靠性評估[5]。評估工業機器人核心部件的性能參數及性能退化機理,建立一套完善的分析、測試及評價方法,對于研究核心部件對整機性能影響具有重要意義。
1 伺服傳動系統機電耦合模型
伺服傳動系統是一個多輸入、多輸出、非線性和強耦合的系統[6-7],需要建立伺服-傳動系統機電耦合模型分別研究各個子系統,再分析系統整體靜動態特性參數對該系統運行品質的影響規律,并構建伺服傳動系統運行品質模型。研究機器人核心部件(減速器、伺服電機)靜動態特性,提出性能退化模型概念,通過仿真和試驗驗證伺服傳動系統對整機性能的影響機理。
1.1 動力學模型
以高性能機器人常用的永磁同步電機為研究對象,通過運動學和動力學模型給定機器人驅動電機角度和負載計算系統響應,在旋轉坐標系下建立數學模型。永磁同步電機電壓方程和電磁轉矩方程為[8-9]
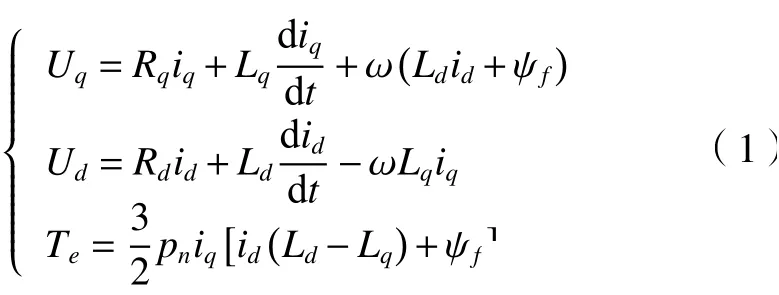
電機的機械運動方程為

式中:J為電機轉子軸轉動慣量;ωm為電機輸出軸機械轉速;Te為永磁同步電機輸出力矩;TL為負載力矩;B為電機阻尼系數。
伺服電機矢量控制原理模型如圖1[10]。
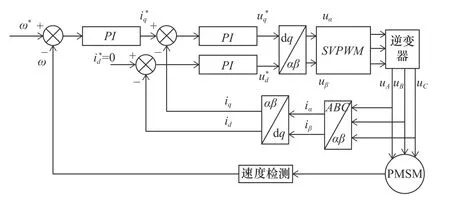
圖1 伺服電機矢量控制原理
永磁同步電機矢量控制原理[11](以雙閉環結構永磁同步電機的矢量控制為例):外環為速度環,輸入為電機轉速參考值與電機反饋值的差值。反饋通過電機后端的光電編碼器輸出角位移和角速度,速度的差值經過轉速環控制器后輸出電流參考值,與反饋電流的差值輸入到電流環控制器,電流的反饋值通過電機內部的霍爾傳感器檢測。外環為電流環,其響應速度最快,輸出兩相電壓的參考值,兩相電壓經過逆變器輸出三相電壓到伺服電機。
基于傳遞函數和典型I、典型II系統[12],以工程實踐經驗法,簡化伺服電機3個控制器的參數以此搭建Clark變換和Park變換模型,最終得到控制仿真模型如圖2。

圖2 伺服電機矢量控制仿真
整定伺服電機的三環PID參數,在Simulink環境下進行雙閉環伺服電機的空載及加載仿真,矢量控制模型和仿真完全吻合,說明建模和參數的選取滿足要求。
伺服傳動系統機械傳動部分采用集中質量建模,驅動系統通過矢量控制建模,忽略齒輪箱的內部結構,聯立機械傳動與電氣驅動部分,得到伺服電機-減速器-負載的機電耦合動力學模型[13]。采用三質量兩軸模型簡化減速器的內部結構如圖3,并根據力學運動方程得到式(3)。
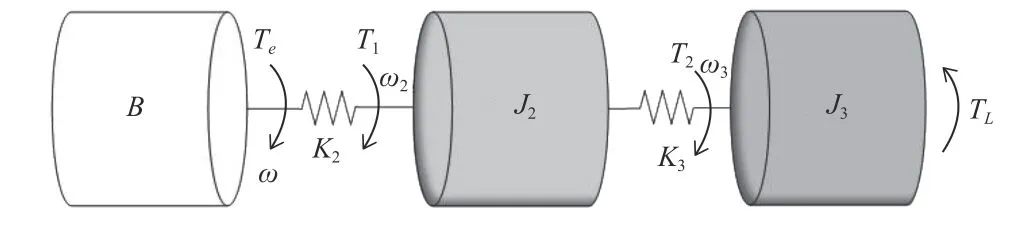
圖3 集中質量法的機電耦合模型
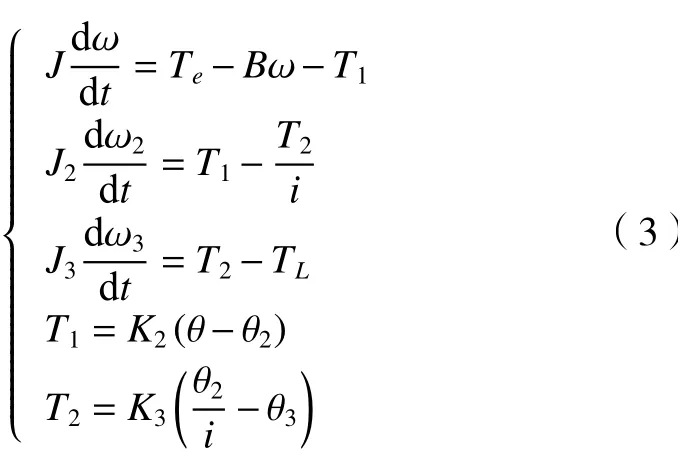
式中:J、J2和J3分別為永磁同步電機、減速器和負載的轉動慣量;K2、K3分別為減速器和傳動軸的剛度;ω、ω2和ω3分別為永磁同步電機、減速器和負載的轉速;θ 、θ2和θ3為 角位移;T1、T2和TL分別為減速器輸出力矩、輸出軸扭矩和負載轉矩。
由于系統輸入與輸出之間存在著力學、電磁以及調速控制系統PID參數的耦合,故將矢量控制模型、機械傳動模型和負載模型統一由PMSM模型表示來搭建機電耦合仿真模型。搭建的機械部分和整個伺服傳動系統的仿真模型分別如圖4和圖5所示。
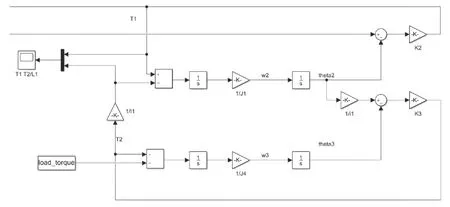
圖4 機械部分仿真模型
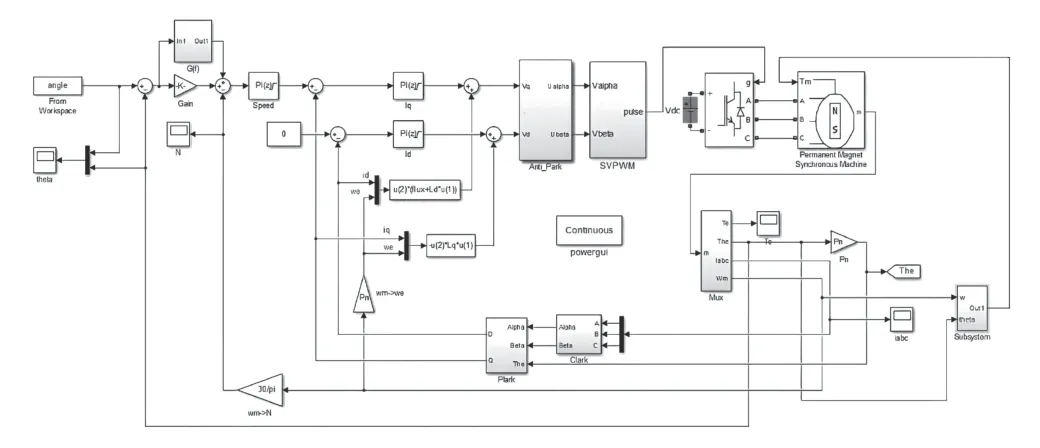
圖5 機電耦合系統仿真模型
1.2 運行品質模型
減速器靜動態特性指標主要指減速器剛度、轉動慣量、回差以及傳遞誤差、傳遞效率。而定位誤差、跟隨誤差、穩定性、跟隨性和電機振動則為伺服系統的靜動態性能指標,這些指標反映了伺服系統的定位能力、定位響應能力、抗負載波動能力以及速度響應能力。工業機器人運行品質主要表現為位姿特性、軌跡特性、靜態柔順性和最小穩定時間[14]。軌跡特性是一種動態特性,表明機器人的動態跟蹤性能,伺服傳動系統運行品質模型則主要研究工業機器人關節穩態時的軌跡跟蹤能力和瞬態響應[15]。
建立如圖6所示的伺服傳動系統機電耦合運行品質模型。分析機器人關節伺服電機系統轉矩、轉速變化時間響應以及減速器空程、回差和傳動誤差等對機器人關節穩定性能的影響。通過機器人運動學和動力學分析核心零部件對機器人整機關鍵性能指標的影響,包括位姿準確度、軌跡重復度、軌跡速度準確性和軌跡速度波動,核心零部件性能參數與整機性能參數間映射關系如圖7。
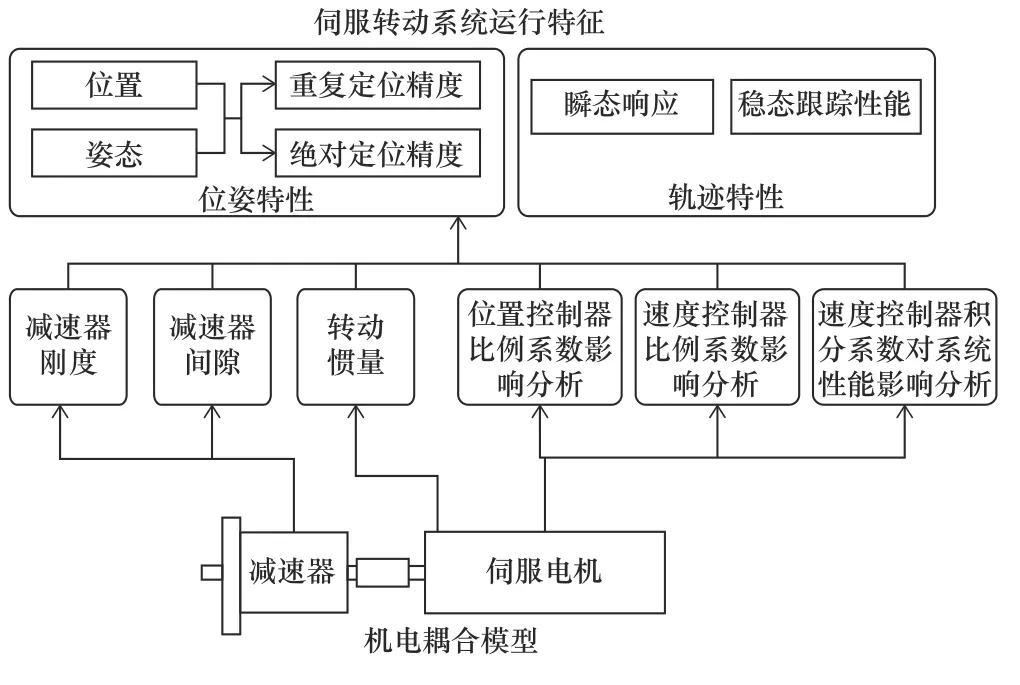
圖6 伺服傳動系統運行品質模型
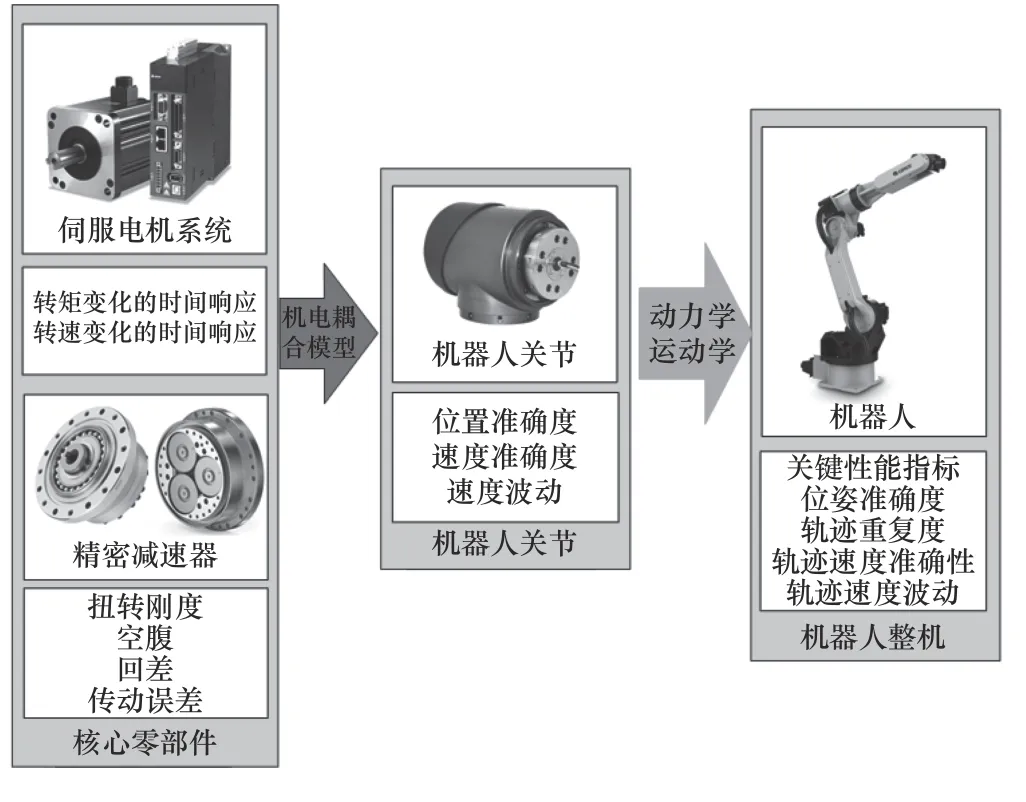
圖7 運行品質參數與整機性能參數關系
2 減速器性能退化模型研究
2.1 減速器壽命影響機理研究
減速器本身是一種高精度、高扭矩的傳動裝置,其內部零件如齒輪、軸承和曲柄軸都具有極強的疲勞強度和剛度,在運轉過程中很難出現破壞形式的失效,而導致其失效的原因往往是內部軸承、齒輪等金屬零件表面的疲勞、磨損[16]。
以常用于工業機器人傳動系統中的RV減速器為對象研究其壽命,其內部軸承均為滾動軸承,不存在金屬表面直接接觸和相對滑動的情況。但在正常工作時,RV減速器兩個擺線齒輪交替旋轉,與滾針間存在相對運動,同時滾針在槽內自轉,不僅受到旋轉帶來的磨損,同時也要承受由于相對運動帶來的持續不斷的剪切力。在工作一段時間后,可能會出現滾針斷裂的情況[17],RV減速器失效如圖8所示。
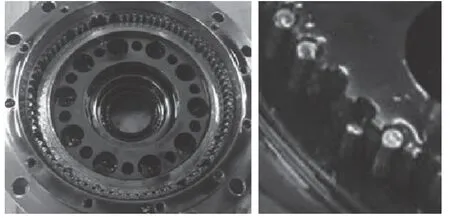
圖8 RV減速器失效圖
偽失效壽命并不是產品真實的使用壽命,而是人為設定了一個壽命年限,當產品的性能退化到此壽命年限時,即認定該產品“失效”。通過借助偽失效壽命的概念,產品實際壽命較長和不方便進行加速試驗的問題迎刃而解。
2.2 減速器性能退化模型
減速器性能退化過程實質上是其傳動效率降低的整個過程,可以用傳動效率表征性能退化。目前已有的產品退化模型是基于5種基礎退化曲線變化而來。5種基礎的退化曲線如下
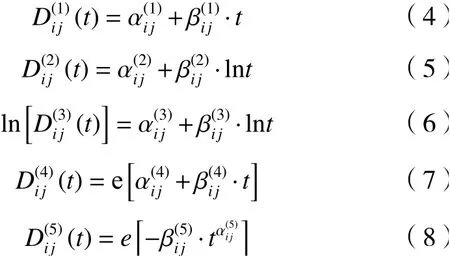

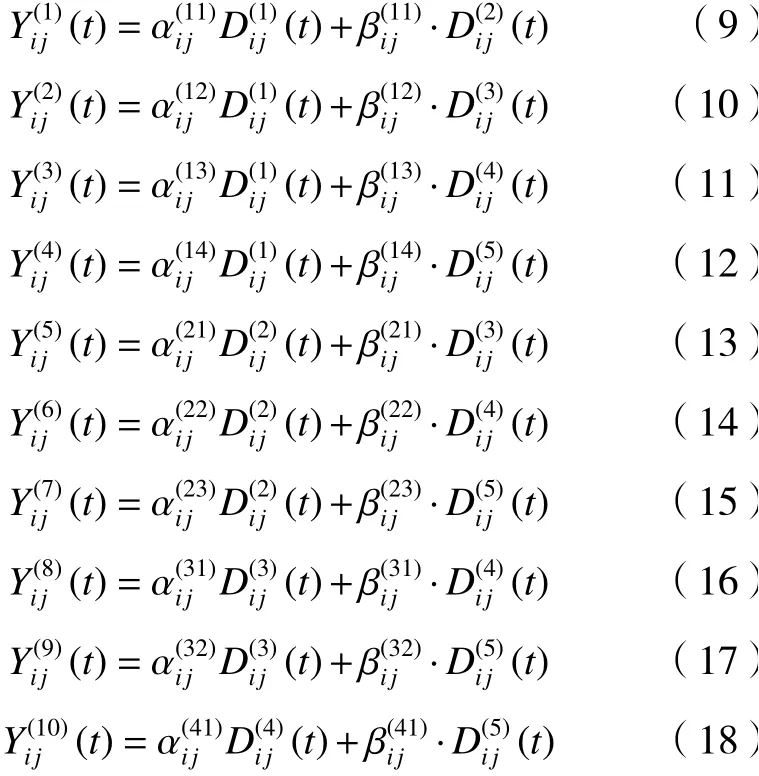
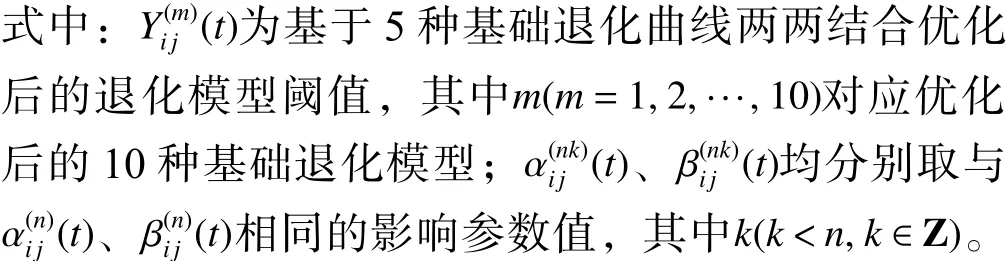
為更合理地描述RV減速器性能退化的完整過程,提出基于不同參數特性兩兩融合的基礎退化曲線,形成10種融合后的退化曲線模型。
2.3 減速器性能及壽命測試方法
2.3.1 加速退化試驗
加速退化試驗是通過對減速器設定一個失效閾值,當產品性能退化到設定閾值時,便認定產品“失效”并停止試驗。最終通過這段時間內產品性能退化數據對產品在正常工況下的壽命進行預測[18]。在加速退化試驗過程中合理控制加速應力的范圍,使減速器的失效機理在試驗過程中保持不變。但實際上加速應力越大,產品性能退化越快,應用逆冪律模型表達整機性能與加速應力關系[19-20]。
試驗選擇國內國外RV減速器各兩臺,測試用RV減速器參數如表1。加速退化工況根據GJB 899A-2009《可靠性鑒定和驗收試驗》進行定時截尾,具體加速退化試驗參數設定如表2,每一階段的性能退化試驗后,對試驗減速器系統進行維護,并分別在0 h、50 h、100 h、200 h、300 h、500 h、700 h和1 000 h時刻記錄減速器的傳動精度、效率、回差和空程。
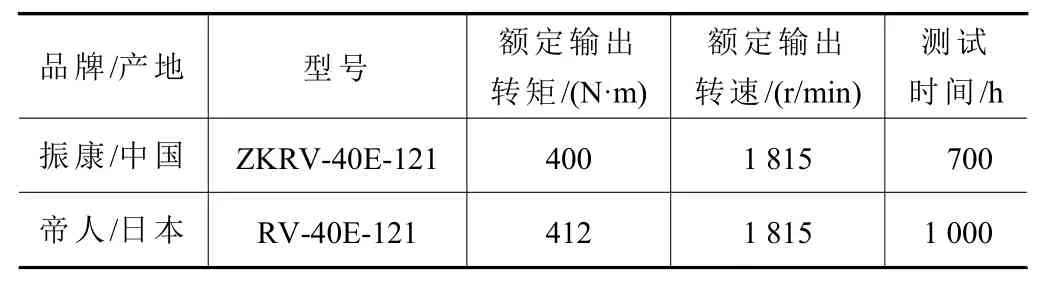
表1 試驗測試的RV減速器參數
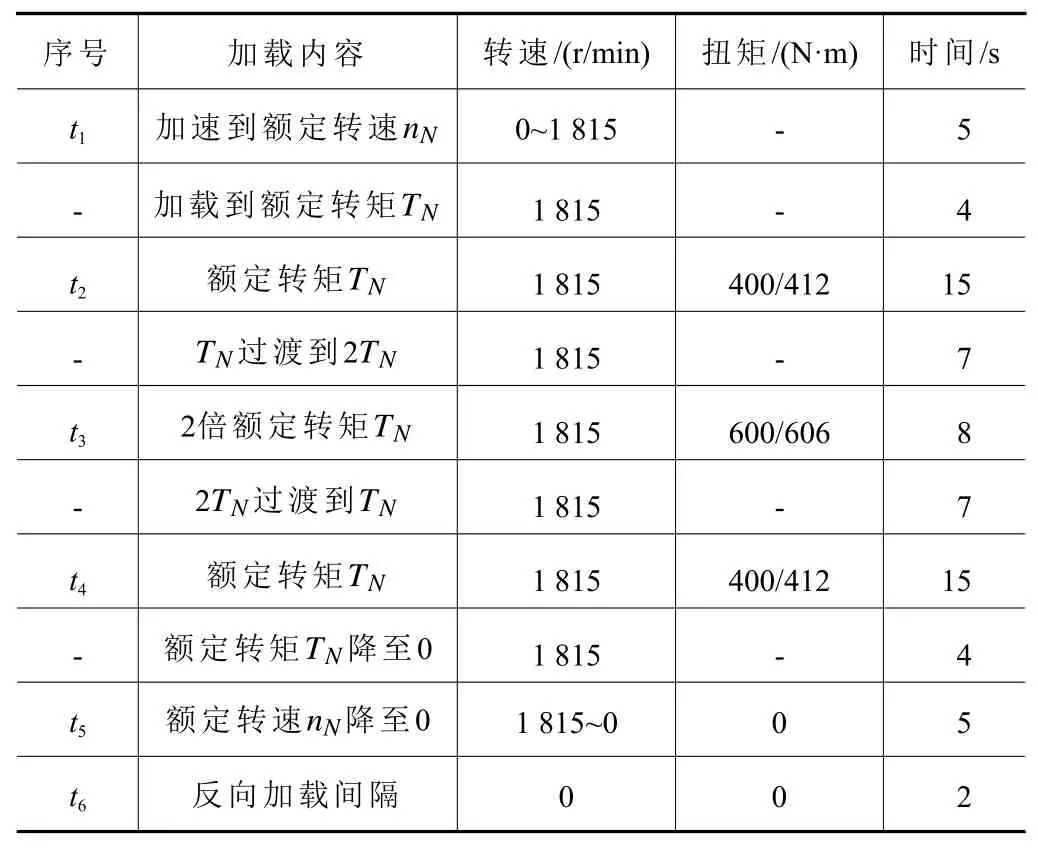
表2 RV減速器加速退化試驗單次循環參數表
2.3.2 退化模型準確度評價與試驗驗證
驗證退化模型準確度,需將試驗數據與退化模型進行曲線擬合,如圖9所示。試驗數據中的數據點表示為(xi,yi),并根據試驗數據得到退化模型表示為y=f(x),擬合后準確度Pi定義為
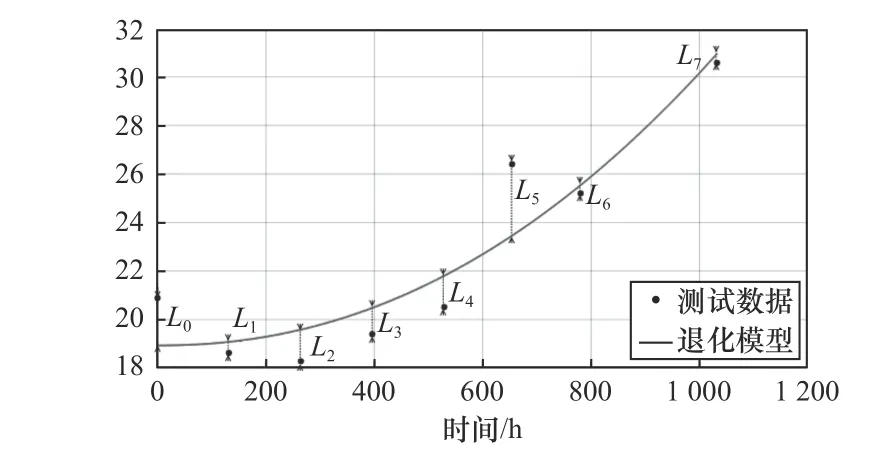
圖9 退化模型準確度驗證

式中:Li=|f(xi)-yi|為測試點與退化曲線的差值。
利用式(19)評價模型中各點準確性的平均值來衡量整個模型的準確性為

RV減速器性能退化模型準確度如表3所示,試驗結果表明:帝人RV40E的整體性能模型平均準確度達到88.57%,單項性能模型平均準確度最高達到99.37%,性能準確度的中位數為85.45%;振康RV40E的整體性能模型平均準確度達到90.21%,單項性能模型的平均準確度最高達到98.17%,性能模型準確度的中位數為90.95%。
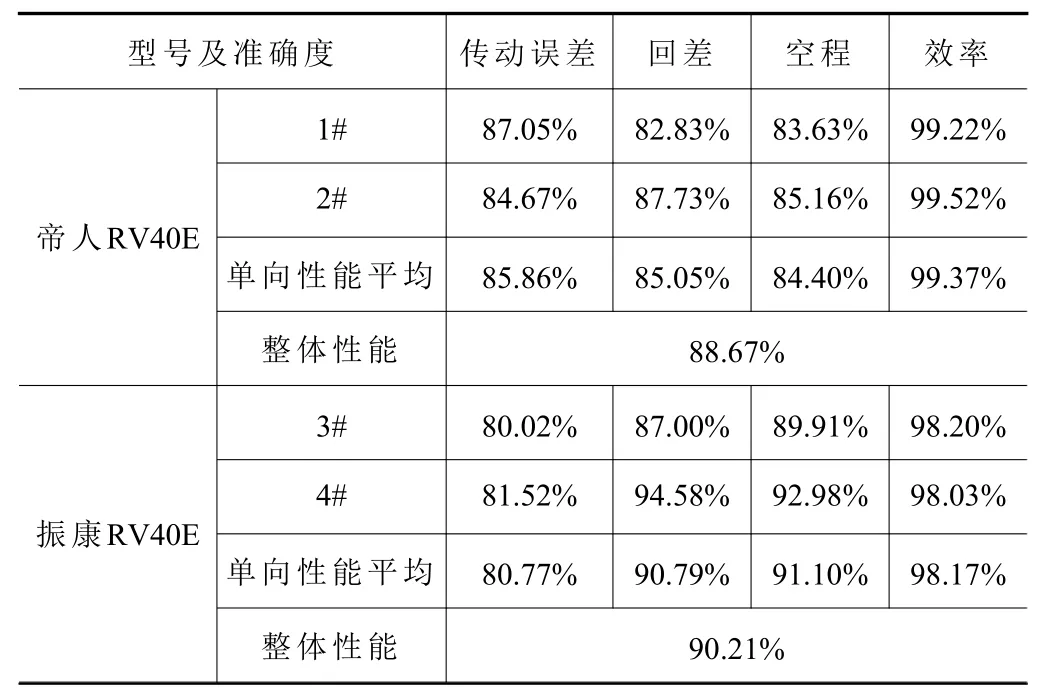
表3 RV減速器退化模型準確度
3 伺服系統性能退化模型研究
3.1 伺服電機系統壽命影響機理研究
將伺服電機系統按功能分為控制電路、功率器件、傳感器等機械部件,并建立伺服電機系統可靠性串聯模型如圖10。電機的失效90%以上來自于軸承失效和定子繞組絕緣失效。因此主要對交流伺服電機的軸承和定子繞組絕緣的可靠性及壽命進行分析。

圖10 伺服電機系統可靠性框圖
建立永磁同步電機軸承和繞組的壽命模型。基于其數學模型,分析加速應力對定子繞組、軸承壽命的影響,確定各部件的加速度壽命系數。
(1)軸承壽命
伺服電機中常用滾珠軸承壽命計算如下:

式中:LR為可靠度R時的軸承壽命,單位為 h;n為軸承的轉速,單位為r/min;C為滾珠軸承額定動載荷,單位為N;P為滾珠軸承承受的當量動載荷,單位為N;ε為壽命指數,球軸承為3。fp為載荷因素;fR為可靠度的壽命修正系數;fL為潤滑的壽命修正系數;fR、fS為潤滑油過濾精度、含水的壽命修正系數;fY為材料熔煉壽命修正系數;fH為表面硬度的壽命修正系數;fT為溫度的壽命修正系數;fE為軸向偏斜的壽命修正系數。溫度對軸承壽命修正系數可用式(22)計算。

(2)定子繞組絕緣壽命
絕緣材料電阻率隨溫度的升高而呈指數下降,但溫度對絕緣壽命影響很難用數學方法從絕緣材料失效機理進行推導,一般通過大量試驗獲得相關數據,用統計方法得出其失效規律和經驗公式為[21]

式中:L為平均絕緣壽命,單位為h;T為絕緣材料溫度,單位為K;k為玻爾茲曼常數8.617×10-5,單位為 eV/K;Ea、G為與絕緣材料有關的系數。
(3)加速壽命
設電機工作時環境溫度為TH1,當量動負荷為P1,軸承溫度為TB1,繞組溫升為TI1。加速壽命試驗時環境溫度為TH2,當量動負荷P2,軸承溫度為TB2,繞組溫升為TI2,則此加速壽命試驗條件對電機不同部分的加速系數如式(24)~(26)。
對軸承的加速壽命系數AB

式中:LB1、LB2分別為額定工作、加速壽命試驗下的軸承壽命;fT1、fT2分別為額定工作、加速壽命試驗下的軸承壽命溫度修正系數;ε為壽命指數,球軸承為3。
對繞組絕緣的加速壽命系數AI

式中:LI1、LI2分別為額定工作、加速壽命試驗下的繞組絕緣壽命。
對伺服驅動裝置加速壽命系數A

試驗結果乘以相應的加速壽命系數得到正常試驗條件下電機的壽命試驗數據。則伺服驅動裝置的等效壽命可表示為

式中:Ai和Ti為第i種工況的加速壽命系數和加速試驗時間。
3.2 伺服驅動系統性能退化模型
伺服驅動系統性能退化模型是具有時變參數的多項式和Wiener過程,基于加速試驗方法的性能退化模型原理如圖11。
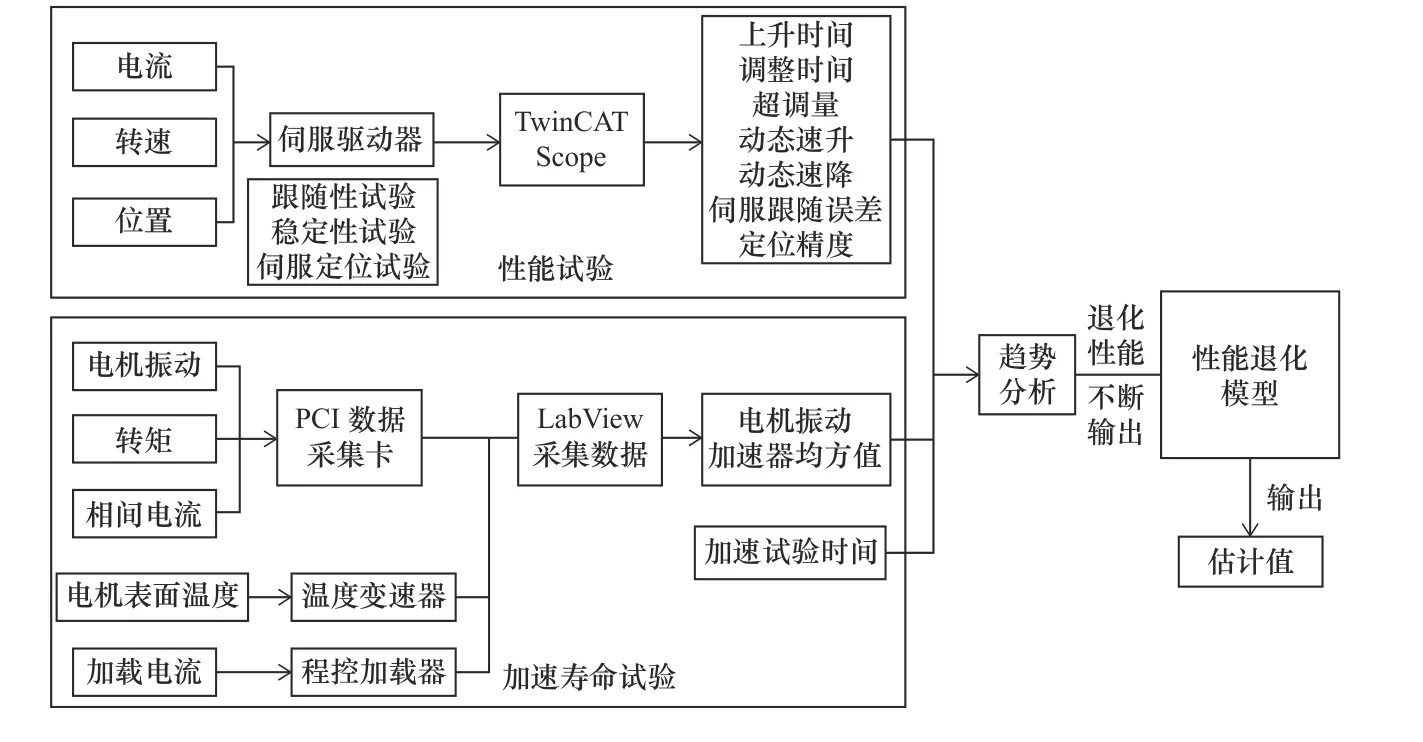
圖11 基于加速試驗方法的性能退化模型原理
通過對伺服電機進行加速壽命試驗,利用加速度傳感器采集電機振動、轉速、扭矩、電壓、電流以及溫度等狀態參數。在加速試驗后,根據電流、轉速參數對伺服驅動器進行性能檢測,包括跟隨性、穩定性和伺服軸定位試驗。分析伺服驅動裝置的上升時間、調整時間、超調量、動態速升、動態速降、伺服跟隨誤差和定位精度。通過趨勢分析判斷性能指標是否有明顯的退化趨勢,并將退化特征不斷通過試驗數據輸入性能退化模型中,預測伺服系統的性能變化。
振動會使機器人的零部件產生附加磨損從而降低末端定位精度和增加定位時間。此外,振動會對整機頻譜特性產生影響,從而導致機器人運行軌跡出現不同程度的偏離[22]。研究振動對機器人整機性能的影響,首先提取干擾噪聲信號進行頻譜分析,并用傅里葉變換將振動信號進行轉換[23]。信號分解常用變換公式為

式 中:A0為 信 號的直流分量;AKcos(2πK f0t+φK)為信號的各階諧波分量;AK為信號諧波分量的振幅;φK為 信號諧波分量的相位角;f0為振動基頻。
此處選用電機振動加速度作為模型參數,形成如下兩種伺服電機退性能化模型。
(1)三次多項式退化模型
用多項式表示性能隨時間的變化

式中:Yt為伺服電機振動加速度;t為電機運行時間;個時變多項式系數;εt為誤差項。
(2)Wiener過程退化模型[24]
Wiener過程的電機振動退化模型可以表示為

式中:Xt為 伺服電機振動加速度;a為初始狀態;μ為漂移參數;σ為擴散參數;W(t)為標準的Wiener過程,并且用 σW(t)~N(0,σ2t)來表示退化過程隨時間變化的概率分布。
3.3 伺服系統性能及壽命測試方法
伺服系統性能及壽命測試方法主要分為電機加速壽命試驗和驅動器性能試驗。壽命試驗可以了解伺服電機的壽命特征、失效規律,確保產品失效率和平均壽命等可靠性指標。性能試驗主要研究伺服驅動裝置的性能隨時間的變化,試驗項目如表4所示。
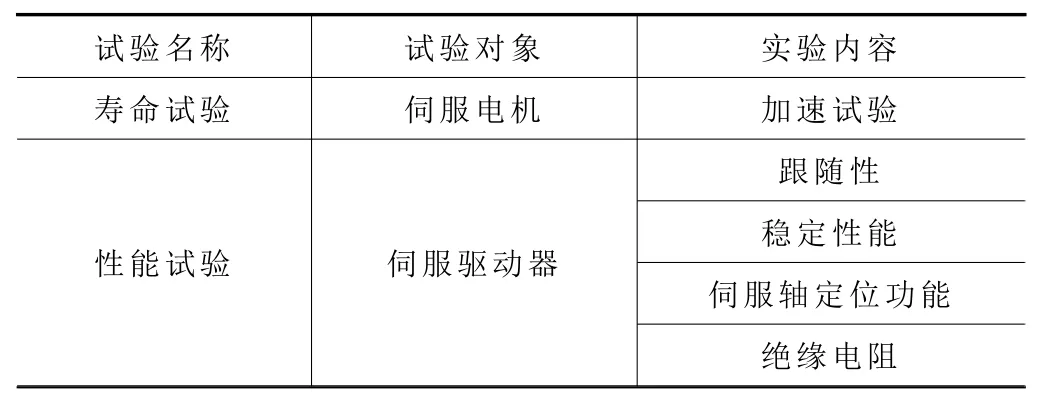
表4 伺服系統性能及壽命測試試驗項目
3.3.1 加速退化試驗及性能測試
試驗選用多摩川、華大、邁信和松下,其產品對應的伺服電機及伺服驅動器參數如表5。伺服電機系統加速壽命試驗以20 s一個循環周期,加載一個周期后改變電機旋轉方向,以100 h為一個周期對試驗伺服驅動系統維護,并進行性能試驗,監控主要性能參數變化,加速試驗循環參數如表6。
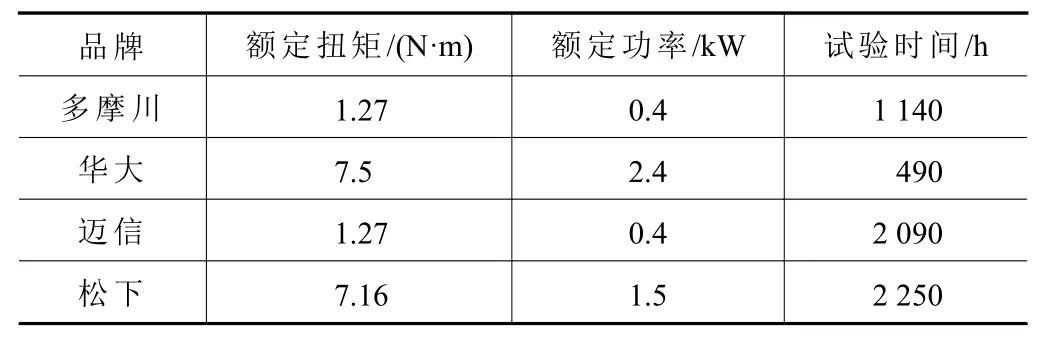
表5 試驗樣品參數及加速試驗時間
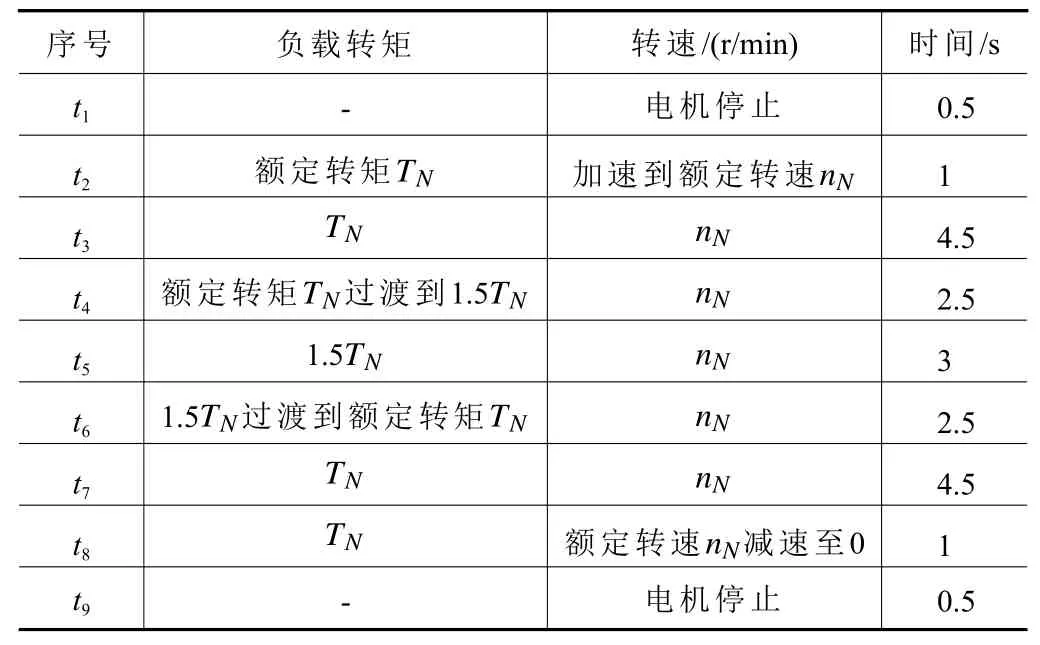
表6 伺服電機系統加速試驗循環參數表
3.3.2 退化模型準確度評價與試驗驗證
對伺服系統的跟隨性、穩定性、伺服軸定位性能參數進行Daniel趨勢檢測法分析,其誤差均方根低于理論值(P<0.01)驗證試驗過程中各性能指標參數無顯著變化,分析結果如圖12。進行多次Wiener迭代優化,最終得到伺服系統退化模型的100 h預測準確度,其中松下準確度最高91.90%,多摩川準確度最低85.07%,華大準確度為87.73%,邁信準確度為89.56%,平均準確度為88.41%。相比較Daniel趨勢檢測,Wiener退化模型精度最高且預測精度穩定性相對較好,可確立最終退化模型為Wiener過程的性能退化模型,并以此來描述退化過程隨時間變化的不確定性。
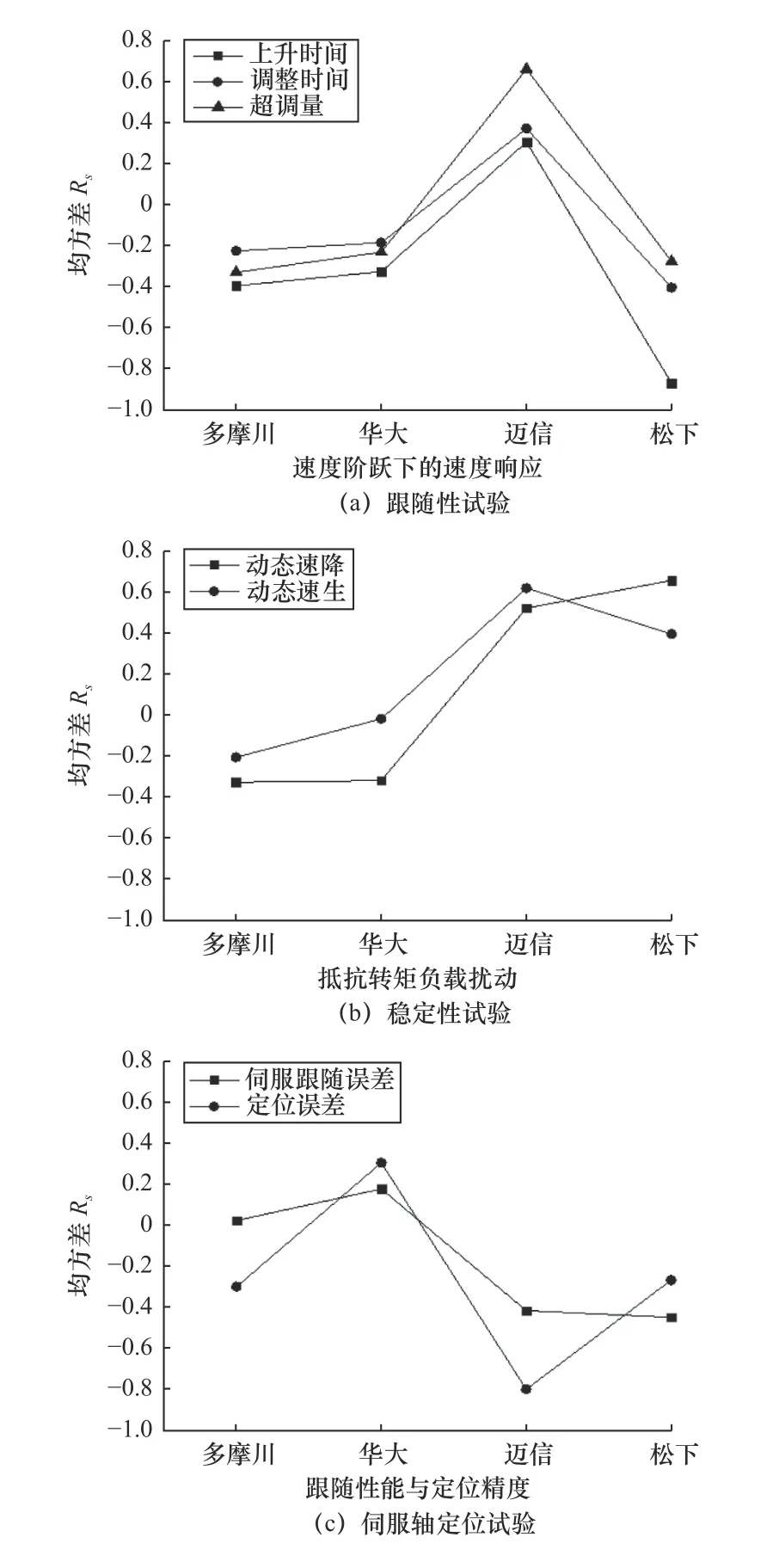
圖12 基于Daniel趨勢檢測的參數誤差
4 結語
(1)分析工業機器人核心部件靜動態特性,建立工業機器人伺服電機、精密減速器等在內的核心部件性能退化模型和、性能退化評估方法及測試技術。同時優化性能退化模型,對伺服系統退化模型參數用Daniel趨勢檢測法進行估計分析,并最終確立以Wiener過程的性能退化模型。通過試驗驗證,機器人伺服系統和精密減速器性能退化模型的準確度均大于85%。鑒于時間和成本等因素的限制,目前僅針對主流品牌和型號的產品開展了測試試驗和模型迭代優化,因此模型的普適性不強。隨著后期不斷開展技術成果的應用與推廣,樣本量逐漸增大,模型將不斷優化迭代并逐步歸一,增強模型的通用性和普適性,進一步提高預測的準確度。
(2)建立了運行品質參數與整機性能評價參數之間的映射關系。設置加速壽命退化試驗確立減速器、伺服系統的性能退化模型中靜動態特性參數變化趨勢,并通過試驗評估方法得到減速器、伺服系統影響機器人整機性能的主要參數的準確度。減速器主要通過剛度、轉動慣量、回差以及傳遞誤差和傳遞效率5個參數影響機器人的整機性能,伺服系統主要通過速度階躍下響應上升時間、調整時間及超調量,抵抗轉矩負載擾動的動態速降、速升,跟隨誤差,定位精度7項參數來影響機器人整機性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
