Blue View 5000型三維成像聲吶在橋梁墩柱結構水下檢測中的應用
2022-10-14 09:20:32蔡林桓
中國水運 2022年9期
蔡林桓
(武漢長江航道救助打撈局,湖北 武漢430014)
1 緒論
1.1 引言
近年來我國基礎設施建設速度迅猛,橋梁作為交通運輸的重要組成部分,在經濟發展中起著非常重要的作用。橋墩基礎是橋梁結構的主要承重構件,與橋梁結構耐久性直接相關,水下橋墩基礎屬隱蔽工程,容易受到水流沖刷、漂流大塊石或過往船只的碰撞等不確定因素影響,由于水流的長期沖刷可能會導致橋梁橋墩周圍泥沙被掏空或樁基外露,從而產生安全隱患,因此需探明橋梁墩柱的水下狀況,為橋梁的運營提供依據。本文依托某工程為研究背景,基于Blue View 5000 型三維成像聲吶技術,探尋三維成像聲吶在橋梁墩柱結構檢測中的應用。
2 三維成像聲吶
Blue View 5000 型三維成像聲吶系統又可以稱為水下三維全景成像聲吶系統,每次發射上百個波束形成一個扇面,通過云臺的水平旋轉(Pan)和傾斜變化(Tilt)實現空間場內點云數據的獲取。Blue View 5000 聲吶可用于水底地形,水下建筑、結構的高分圖像生成,該設備設計緊湊,體積小便于在各種平臺上安裝,且操作簡便,一鍵成像,可根據需求生成扇形掃描或者球面掃描的水下三維點云圖像。
2.1 三維成像聲吶的系統組成
三維成像聲吶系統(BV5000)主要由軟件和硬件兩個部分組成。硬件部分主要由數據傳輸線纜、甲板單元、云臺、換能器四個部分組成,主要硬件展示如圖1。而軟件主要使用儀器開發團隊提供的BlueViewer 和Proscan 和leica 的Cyclone 點云處理軟件。

圖1 BV5000 硬件示意圖
2.2 三維成像聲吶的工作原理
三維成像聲吶系統(BV5000)主要依據聲學測距的方式水下目標到聲吶的距離。在BV5000 工作時,首先由水聲換能器發射一組聲波,產生一個固定方向角的扇形掃描區域或者球形掃描區域,當聲波到達目標后發生反射,返回的信號被換能器接收,再轉變為電信號的形式將信息傳給甲板單元和控制終端。終端對接收的信號進行處理和分析還原出反射目標的相對空間坐標,然后在顯示器上通過點云圖像來反應。BV5000 在45°-360°的掃描區域均勻發射256 個波束,然后通過云臺在水中的旋轉來獲取待掃測區域的三維點云圖像。

表1 三維成像聲吶相關技術參數
2.3 檢測方式
本次橋墩掃測的總方案為:通過三維圖像聲吶對涉水墩臺水下部分進行多站掃測,對掃測圖像進行拼接分析,獲得水下墩柱形態及沖刷情況。
BV5000 聲吶系統有效探測范圍為30 m,為獲得結構物體或整個區域內的三維圖像,通常需設立多個掃描測站,從不同的方位進行觀測,獲取若干幅掃描圖像,然后經過拼接形成一個完整的目標物。一般根據檢測目的、目標物形狀、尺寸設置一個或多個測站,最后通過數據處理完成圖形的拼接。
對橋墩區域附近的水流的流速及流向等數據進行現場采集,結合作業點位布置聲吶平臺,以不危害橋墩安全為首要原則,保持足夠的距離,或靠近柔性接觸,根據各個墩臺的形態特點,以及三維成像聲吶的掃測原理,在每個橋墩周圍布設4 個掃測點,掃測點示意圖如下。
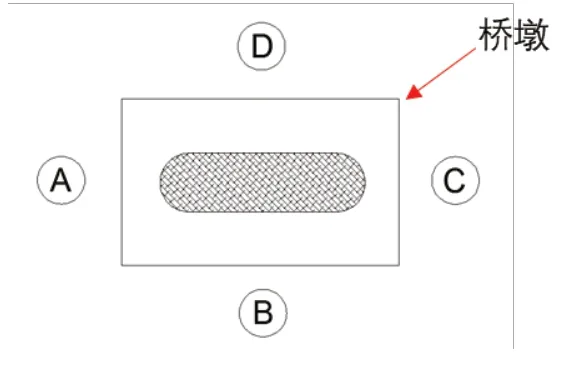
圖2 三維圖像聲納測點布置示意
三維成像聲吶系統對橋梁橋墩進行全方位的檢測,通過遠程控制軟件來控制其開始掃測。根據點位情況的不同,掃測時選擇不同的角度,確保不能遺漏任何目標
物[6]-[7]。
3 應用實例
3.1 工程概況
某大橋全長7370m,中心里程為k32+821,以(60+100+60)m,連續梁上跨在建漢鄂快速通道。漢鄂快速通道該段設計為橋梁,道路與線路大里程夾角為28.6°道路設計寬度26m,路面設計標高22.5m。箱梁橫截面為單箱室直腹板,箱梁頂板寬12.2m,厚48 cm,底板寬6.0m,底板厚由跨中的38 cm 按圓曲線變化至中支點梁部的97.6 cm,中支點處加厚到140cm,腹板厚分別為45,60,90,100 cm;端支座處及邊跨直線段和跨中心處梁高為4.53 m,中支點截面中心處梁高6.83m,梁高按圓曲線變化,圓曲線半徑R-488.546 m;全橋共設5 道橫隔梁,分別設于中支點、端支點、和中間跨跨中截面,中支點處設置厚2.5m 的橫隔梁、邊支點處設1.45m 厚的端隔梁、跨中合龍段設厚0.4m 的中橫隔梁,橫隔梁設有孔洞,供檢查人員通過。本項目針對涉水的3 座橋墩,對其進行檢測,查明其結構病害和破損情況。
3.2 橋梁墩柱結構檢測流程
三維圖像聲吶對橋梁墩柱結構檢測流程如圖3所示:
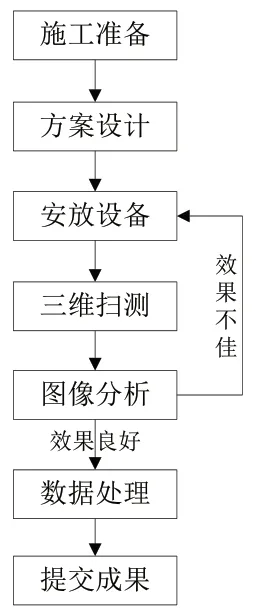
圖3 水下墩柱掃測流程
首先,施工前需要對三維成像聲吶進行調試確保設備在施工現場能夠正常工作,根據橋墩形狀設計聲吶布設點位,具體方案如圖3,然后根據設計的方案將三維圖像聲吶放入水中,待儀器穩定后開始掃測,三維圖像聲吶可以當場進行簡單判讀,檢查墩臺水下部分有沒有出現破損情況,如果發現有該情況,則記錄位置,大概尺寸等相關數據,后期定量分析進行重點關注。
三維點云數據的拼接建模,是數據處理最煩瑣、難度最大的過程。首先要根據各個測站的位置,尋找相鄰測站的同名目標。同名目標的質量和數據量決定了拼接建模的精度和效果。選定同名目標時,應當選擇清晰、完整的目標,并進行準確的框選。數據處理拼接軟件會根據同名目標采用最小二乘法對點云數據進行加權誤差分配,形成兩站間三維點云數據的拼接建模。
最后采用三維軟件中量具對結構的尺寸進行測量,與設計尺寸進行校核,以確保正確判斷樁基縮徑病害。
3.3 橋梁墩柱結構水下檢測
通過對三維點云數據拼接建模后形成的效果圖如下:
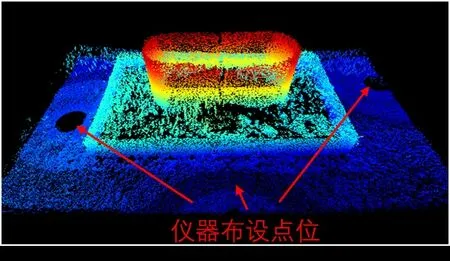
圖4 三維圖像聲吶掃測效果圖
從圖5可以看出三維成像聲吶生成的點云圖像,通過高層分層設色的方法,可以清晰地反應橋梁橋墩、承臺在水下的具體狀況,以及橋墩附近河床的是否存在沖刷或淤積現象。

圖5 某涉水橋墩三維點云圖(側視圖+俯視圖)
3.4 三維成像聲吶檢測結果分析
通過三維點云數據進行分析,三維圖像聲吶在橋墩檢測中可以達到如下效果:
(1)能夠反映橋梁墩柱在水下的真實結構,能夠查明墩以及承臺外露部分結構是否完整,有無混凝土破損。
(2)能夠對墩以及承臺外露部分結構進行測量尺寸,如出現大面積混凝土破損能夠進行定位,并進行尺寸量測。
(3)能夠對橋墩附近河床地形進行探測,查明有無局部沖刷、淤積等現象。

圖6 三維成像聲吶墩柱水上水下效果結合圖
4 總結
綜上,三維成像聲吶系統能夠直觀的獲取水下橋墩的結構,高分辨率的點云數據清晰直觀,具有可量測性,能夠很好地解決涉水橋墩處于水下,隱蔽難以探查的難點,同時能夠對橋墩附近河床地形進行探測,查明有無局部沖刷、淤積等現象,為橋梁運營維護提供數據支撐。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
山東工業技術(2016年15期)2016-12-01 05:31:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12