電控CNG發(fā)動(dòng)機(jī)模糊故障診斷策略研究
2022-10-17 10:32:08張莉蘇曉芳陳娜娜
電子測(cè)試 2022年16期
張莉,蘇曉芳,陳娜娜
(1.北京城市學(xué)院,北京,101300;2.天津機(jī)電職業(yè)技術(shù)學(xué)院,天津,300350)
0 引言
CNG發(fā)動(dòng)機(jī)是在原有柴油機(jī)基礎(chǔ)上進(jìn)行改進(jìn),且采用電控技術(shù)控制相應(yīng)部件,使其控制的精度不斷提高,因此采用的控制策略和控制邏輯也越來越復(fù)雜。一旦某個(gè)部件出現(xiàn)問題,發(fā)動(dòng)機(jī)可能會(huì)出現(xiàn)一種或多種故障癥狀;故障癥狀的表征不一,而且同一種故障癥狀引起的原因有多種,這就導(dǎo)致了故障癥狀和故障原因之間存在模糊不確定的關(guān)系,故引入模糊推理方法來診斷這種不確定性、模糊性問題。
另外,電控CNG發(fā)動(dòng)機(jī)與常規(guī)汽、柴油發(fā)動(dòng)機(jī)在燃燒特性上的差異,使得其組成結(jié)構(gòu)、故障機(jī)理以及故障特點(diǎn)也在許多方面與汽、柴油機(jī)不同,其故障診斷的內(nèi)容也更加復(fù)雜。鑒于此,引入模糊邏輯推理來進(jìn)行電控CNG發(fā)動(dòng)機(jī)故障診斷策略的研究。
1 模糊故障診斷模型
1.1 知識(shí)庫的建立
由于電控CNG發(fā)動(dòng)機(jī)工作情況和故障診斷內(nèi)容的復(fù)雜性,發(fā)動(dòng)機(jī)故障現(xiàn)象與故障部位之間的對(duì)應(yīng)關(guān)系也較為復(fù)雜,導(dǎo)致CNG發(fā)動(dòng)機(jī)的故障多為不確定性故障。在進(jìn)行發(fā)動(dòng)機(jī)故障診斷知識(shí)的表示要考慮諸多因素,要對(duì)發(fā)動(dòng)機(jī)的故障進(jìn)行分析和歸類。
1.2 不確定性知識(shí)的表示
針對(duì)CNG發(fā)動(dòng)機(jī)故障現(xiàn)象與原因之間的復(fù)雜關(guān)系,且二者之間沒有明確的對(duì)應(yīng)關(guān)系和規(guī)律可循。為了能夠利用故障癥狀快速而準(zhǔn)確的判斷故障,必須先從故障癥狀與故障原因的相關(guān)性分析入手,通常引入隸屬度函數(shù)來表示這種關(guān)聯(lián)。相互關(guān)系一般是在歸納總結(jié)、統(tǒng)計(jì)分析、不斷校正的基礎(chǔ)上獲得的,由于二者之間沒有明確的對(duì)照,針對(duì)這種復(fù)雜的不確定性知識(shí)引入模糊數(shù)學(xué)理論進(jìn)行分析和表示。同時(shí),需要注意在知識(shí)的表示時(shí)采用規(guī)范化的計(jì)算機(jī)容易識(shí)別的形式有利于模糊系統(tǒng)的知識(shí)的自動(dòng)獲取,可以直接輸入到計(jì)算機(jī)中。在知識(shí)的表示和組織中,最頂層的對(duì)象應(yīng)是發(fā)動(dòng)機(jī)本身,其下層關(guān)系為發(fā)動(dòng)機(jī)的各子系統(tǒng),再下層應(yīng)為各子系統(tǒng)的部件。為了便于計(jì)算機(jī)接受,可將故障按照層次分類,首先分為燃?xì)狻⑦M(jìn)氣、點(diǎn)火、怠速、電控和機(jī)械等六類系統(tǒng)級(jí)別故障。然后,每個(gè)系統(tǒng)級(jí)別故障又可分為若干部件故障。最后,行業(yè)領(lǐng)域?qū)<抑R(shí)可以歸納為三個(gè)層級(jí),分別是典型故障癥狀、系統(tǒng)級(jí)別故障和部件故障。
電控CNG發(fā)動(dòng)機(jī)是在柴油機(jī)基礎(chǔ)上改制而成的,增加了相應(yīng)的燃?xì)饪刂撇考腿細(xì)釫CU,使得故障高發(fā)率主要集中在燃?xì)夤┙o系統(tǒng)。根據(jù)行業(yè)領(lǐng)域?qū)<业慕?jīng)驗(yàn)知識(shí)及企業(yè)調(diào)研建立如表1所示的燃?xì)庀到y(tǒng)的常見故障現(xiàn)象、故障原因知識(shí)庫。
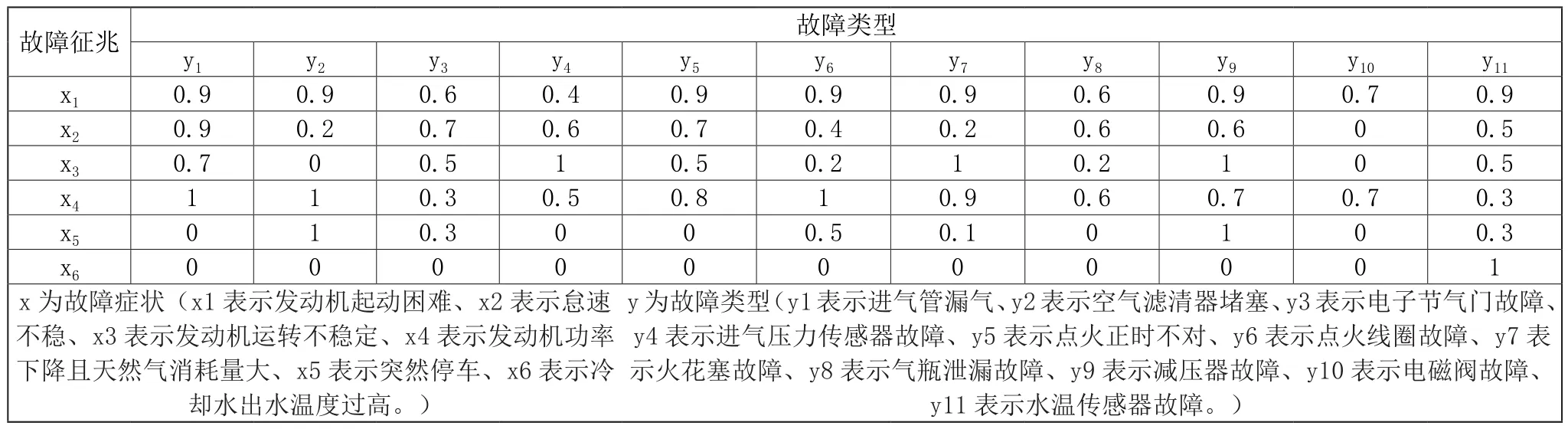
表1 電控CNG發(fā)動(dòng)機(jī)故障知識(shí)庫
由于電控CNG發(fā)動(dòng)機(jī)結(jié)構(gòu)復(fù)雜,故障信息模糊,使得故障征兆和故障原因之間難以建立正確的數(shù)學(xué)模型,所以在建立故障訓(xùn)練樣本時(shí),需要用模糊理論將CNG的故障輸入量進(jìn)行模糊化表示,其隸屬度的確定是依據(jù)專家經(jīng)驗(yàn)法及維修實(shí)際情況給出[1]。將故障存在的程度分為5個(gè)層次,見表2。
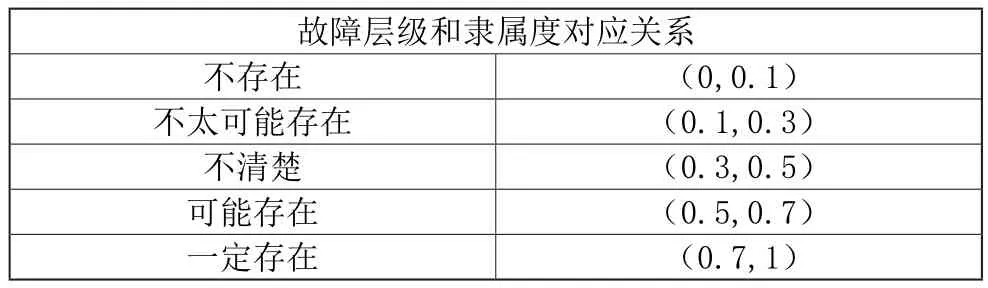
表2 故障層次
以故障y1進(jìn)氣管漏氣為例,其故障癥狀x經(jīng)模糊化處理的輸入向量為{0.9,0.9,0.7,1,0,0}。參照以上可對(duì)CNG發(fā)動(dòng)機(jī)燃?xì)庀到y(tǒng)常見故障進(jìn)行模糊化表示,得到表1所示的訓(xùn)練樣本。
2 模糊推理策略
推理策略是系統(tǒng)進(jìn)行故障診斷的重要組成部分,依據(jù)電控CNG發(fā)動(dòng)機(jī)故障癥狀和故障原因之間的模糊關(guān)系,采用模糊推理策略。
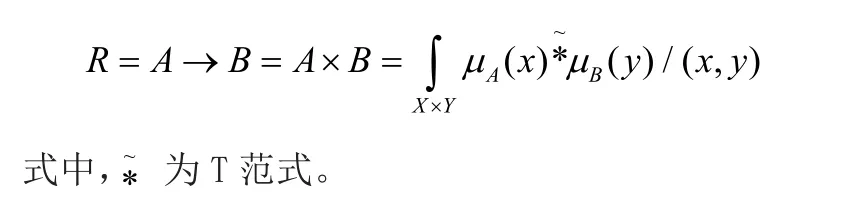
模糊推理規(guī)則表示:

式(1)中A-論域X的模糊集合、B-論域Y的模糊集合。通常,稱“x is A”為前件或前提,“y is B”為后件或結(jié)論。式中表達(dá)了兩個(gè)變量x∈X,y∈Y之間的關(guān)系,把if-then規(guī)則定義為乘積空間X×Y上的二元模糊關(guān)系R。則有:
有了模糊規(guī)則就有模糊推理,且多數(shù)情況下是近似推理。根據(jù)式(1)規(guī)則進(jìn)行的推理可寫作:
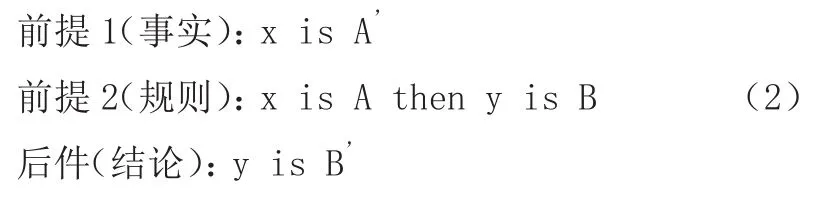
式(2)可以由如下公式計(jì)算:

式(3)采用了(∧,∨)模糊算子。當(dāng)規(guī)則有多個(gè)前提時(shí),也可以采用類似與式(3)進(jìn)行計(jì)算[2]。
鑒于電控CNG發(fā)動(dòng)機(jī)出現(xiàn)故障的隨機(jī)性和人工經(jīng)驗(yàn)的模糊性等特點(diǎn),也可使用正反向混合演繹推理(此處不是本文核心,故不再贅述)和模糊子集法進(jìn)行綜合診斷,避免出現(xiàn)診斷時(shí)間過長(zhǎng),過程繁瑣的問題。
3 模糊診斷過程實(shí)現(xiàn)
模糊診斷方法是一種基于知識(shí)的自動(dòng)診斷方法,它是利用模糊邏輯描述故障原因與故障現(xiàn)象之間的模糊關(guān)系,通過隸屬度函數(shù)和模糊關(guān)系方程解決故障原因與狀態(tài)識(shí)別問題[3]。在實(shí)際故障診斷時(shí),要在傳統(tǒng)模糊關(guān)系矩陣基礎(chǔ)上,構(gòu)建精確的數(shù)學(xué)模型比較困難,需要實(shí)時(shí)獲取故障相關(guān)的輸入信息,利用計(jì)算機(jī)的自學(xué)習(xí)功能修正權(quán)系數(shù),最終得到動(dòng)態(tài)的模糊診斷矩陣。
3.1 模糊矩陣
依據(jù)專家經(jīng)驗(yàn)分析判斷,在分析異常故障現(xiàn)象的基礎(chǔ)上得出故障原因。依靠模糊邏輯推理,對(duì)模糊推理結(jié)果進(jìn)行綜合評(píng)判。針對(duì)發(fā)動(dòng)機(jī)故障的模糊關(guān)系,引入模糊關(guān)系矩陣表示。實(shí)際出現(xiàn)的發(fā)動(dòng)機(jī)故障不是“非此即彼”,而是復(fù)雜的、不明確的對(duì)應(yīng)關(guān)系,這種對(duì)應(yīng)關(guān)系就決定了CNG發(fā)動(dòng)機(jī)故障的復(fù)雜性和模糊性。
對(duì)故障原因集Y中的故障原因yj(j=1,2,...,n)做出故障評(píng)判,確定該故障原因?qū)收习Y狀xi(i=1,2,...,m)的隸屬度(或發(fā)生故障癥狀xi時(shí)故障原因是yi的可信度)rij。這樣n個(gè)故障原因?qū)?yīng)m個(gè)故障癥狀的評(píng)價(jià)集就構(gòu)成了評(píng)價(jià)模糊矩陣R:
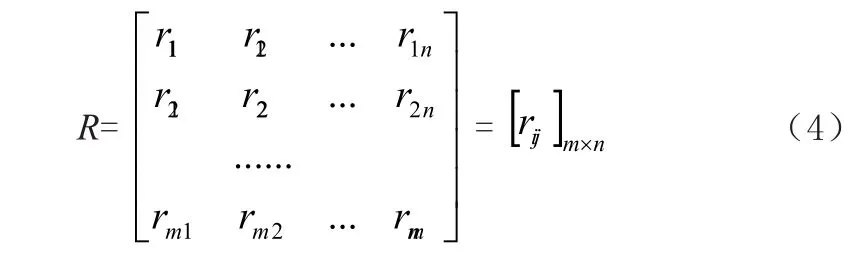
其中,0≤rij≤1,1≤i≤m,1≤j≤n
模糊矩陣R是故障原因論域Y與故障征兆論域X的一種模糊關(guān)系。模糊關(guān)系矩陣R是m×n維矩陣,其中故障征兆為行,故障原因?yàn)榱校趇種征兆xi對(duì)第j種原因yj的關(guān)聯(lián)度為矩陣元素rij,即發(fā)生故障癥狀xi時(shí)故障原因是yi的可信度。
3.2 模糊診斷實(shí)例
文章以電控CNG發(fā)動(dòng)機(jī)起動(dòng)困難、發(fā)動(dòng)機(jī)怠速不穩(wěn)易熄火故障為例具體說明模糊診斷過程的實(shí)現(xiàn)。其故障診斷表見表3~表6所示。

表3 故障癥狀等級(jí)和專家評(píng)分表
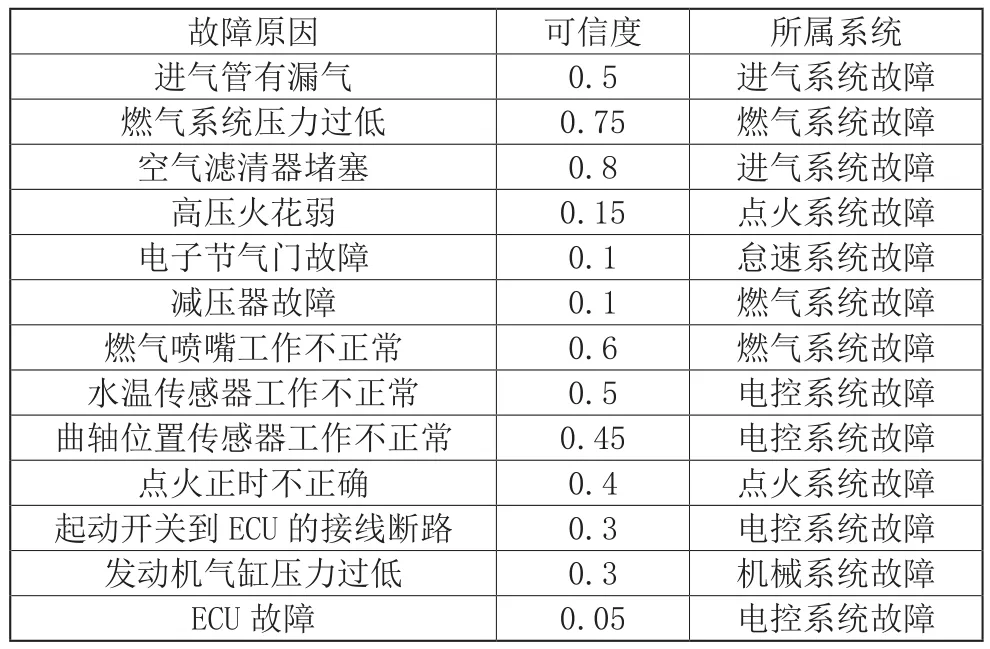
表4 “發(fā)動(dòng)機(jī)起動(dòng)困難”對(duì)應(yīng)故障原因表

表5 “發(fā)動(dòng)機(jī)怠速不穩(wěn)易熄火”對(duì)應(yīng)故障原因表
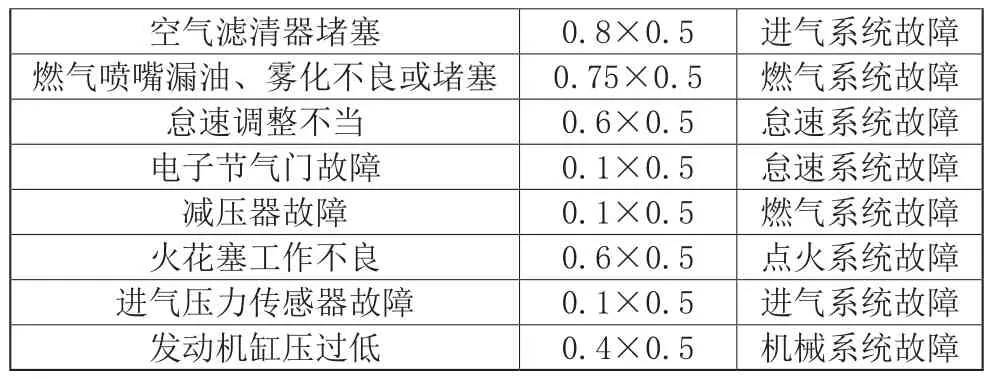
空氣濾清器堵塞 0.8×0.5 進(jìn)氣系統(tǒng)故障燃?xì)鈬娮炻┯汀㈧F化不良或堵塞 0.75×0.5 燃?xì)庀到y(tǒng)故障怠速調(diào)整不當(dāng) 0.6×0.5 怠速系統(tǒng)故障電子節(jié)氣門故障 0.1×0.5 怠速系統(tǒng)故障減壓器故障 0.1×0.5 燃?xì)庀到y(tǒng)故障火花塞工作不良 0.6×0.5 點(diǎn)火系統(tǒng)故障進(jìn)氣壓力傳感器故障 0.1×0.5 進(jìn)氣系統(tǒng)故障發(fā)動(dòng)機(jī)缸壓過低 0.4×0.5 機(jī)械系統(tǒng)故障
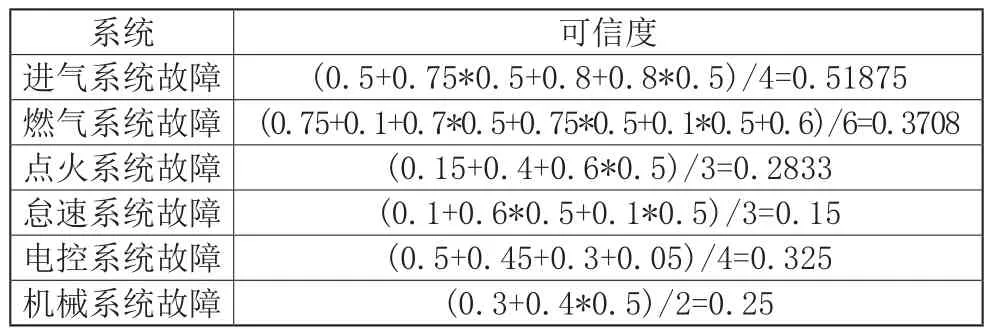
表6 各系統(tǒng)可信度統(tǒng)計(jì)表
通過計(jì)算,發(fā)現(xiàn)進(jìn)氣系統(tǒng)發(fā)生故障的可信度最大,即引起發(fā)動(dòng)機(jī)起動(dòng)困難和怠速不穩(wěn)易熄火故障的原因最大可能是進(jìn)氣系統(tǒng)問題,可按照系統(tǒng)提供的檢修建議優(yōu)先級(jí)別進(jìn)行檢查,若該系統(tǒng)確有故障,可對(duì)該系統(tǒng)中的可疑部件依次進(jìn)行檢修,檢修順序參照可信度大小排序檢查,依次排除,最終確定故障原因。若該系統(tǒng)無故障,則按照上述方法檢修下一個(gè)系統(tǒng),直到確診。經(jīng)實(shí)踐檢修,驗(yàn)證診斷結(jié)果的正確性。
4 結(jié)論
通過分析,模糊邏輯診斷成功與否依賴于構(gòu)建動(dòng)態(tài)故障診斷模型和模糊矩陣的正確性。通過建立模糊診斷矩陣,并經(jīng)過修正,則會(huì)得到比較接近實(shí)際的,能客觀反映故障原因的結(jié)論。實(shí)驗(yàn)證明,模糊推理結(jié)論符合實(shí)際診斷結(jié)果。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48
