萊州灣海底有纜觀測網自適應監控系統開發
2022-10-19 13:02:06劉海林
光通信研究 2022年5期
陳 杰,呂 斌,劉 超,劉海林
(齊魯工業大學(山東省科學院),山東省科學院海洋儀器儀表研究所,山東 青島 266001)
0 引 言
隨著國家海洋牧場研究與建設逐漸步入正軌,海底有纜在線觀測成為實現海洋牧場可測、可控和可視的重要手段[1-2]。在“十三五”期間,依托國家發改委“智慧海洋”課題,在黃渤海重點區域構建了“空、天、地、海”一體化的海洋立體感知網。本文就是在該課題背景下,為“智慧海洋”工程子任務-萊州灣立體感知網建設海底觀測網絡設計遠程監控系統。
海底觀測網絡主要由接駁盒、數據采集器以及數據采集器上的傳感器構成,從海底到海面主要通過鎧裝的光電復合纜進行連接[3-4]。海底觀測網絡的監控系統(Monitoring System for Seafloor Observatory Network, SON-MS)是整個系統的數據核心和控制核心[5]。目前公開的比較成熟的監控系統主要是加拿大的維多利亞海底實驗網(Victoria Experimental Network Under the Sea,VENUS)和美國提出的“海王星”海洋觀測網絡計劃(the North East Pacific Time-Integrated Undersea Networked Experiment,NEPTUNE)的遠程監控系統[6-7]。用戶可以通過VENUS和NEPTUNE監控系統對設備進行在線管理,也可以查看在線視頻以及傳感器等數據,但是該監控系統使用文件的形式對數據進行保存,沒有太多涉及設備動態管理以及數據產品制作方面的考慮。國內相關研究單位也開發了一些海底觀測網的遠程監控系統。但大多數監控系統都沒有考慮設備即插即用動態管理的需求[8]。海底觀測網絡長期放置水下,在網絡運行過程中,SON-MS需要接收不同設備的數據格式各異的海量數據,同時也需要將指令通過光電復合纜準確下發至水下設備,不同設備的數據格式不同,水下的環境也很復雜,設計標準化的通信協議并實現海量數據的同步解析以及指令準確下發等通信問題是監控系統最基本的功能需求。同時海底網絡涉及的儀器設備成百上千,這些設備的接口和數據格式等形式各異,如何采用可擴展的模式,在軟件上做到即插即用,是SON-MS的另一個功能需求。最后,SON-MS還需要對數據剔除異常值,進行數據質量控制和數據產品制作等,為用戶提供數據服務,良好的數據可視化交互是SON-MS的另一技術難點。本文重點剖析上述關鍵技術及難點問題,設計開發了自適應可擴展開放式的SON-MS。
1 系統分析
本文提出了一種SON-MS控制模型。整個模型分為4個層:傳感層感知動態海洋環境信息,形成控制模型的信息基礎;采集層采集現場實時的海洋觀測數據,并在服務層以及傳感層之間轉發信息;服務層管理各種類型的信息,并提供一組與遠程控制相關的操作;應用層是一個面向工程的層,其使用各種信息來滿足項目需求。層與層之間的功能是相對獨立的,且其間的接口均為標準接口。每個層使用相鄰底層的服務,并向其相鄰上層提供服務。
圖1所示為由控制模型衍變而來的SON-MS的體系結構,該體系結構包含觀測節點、海上平臺和SON-MS 3部分以及觀測數據流和指令流兩種類型的信息流。綠色為數據流,主要包括觀測節點處傳感器獲取的數據需要按照圖中標記的方向層層上傳至SON-MS。紅色為指令流,SON-MS依據遠程監控的需求,將指令層層下發至海底的傳感器。對照控制模型以及SON-MS的體系結構,應用層和服務層是部署在SON-MS中,而采集層和傳感層是分布在觀測節點中。由該體系結構可知,SON-MS需要與海底的儀器建立通信連接,采集水下設備的科學數據,并同時將相應指令下發至海底設備;SON-MS還需要管理海底成百上千種的傳感器設備并對設備運行狀態以及科學數據進行實時監測;同時SON-MS需要將源數據解析成用戶可理解的數據、存儲數據庫以及可視化管理顯示等。由圖1可知,紅色綠色所示的雙向信息流涉及的數據通信是SON-MS正常運行的前提,觀測節點處涉及的設備動態管理是海底觀測網絡動態可擴展的重要功能需求,數據解析處理和質量控制并制作成數據產品又是SON-MS系統設計的核心需求。
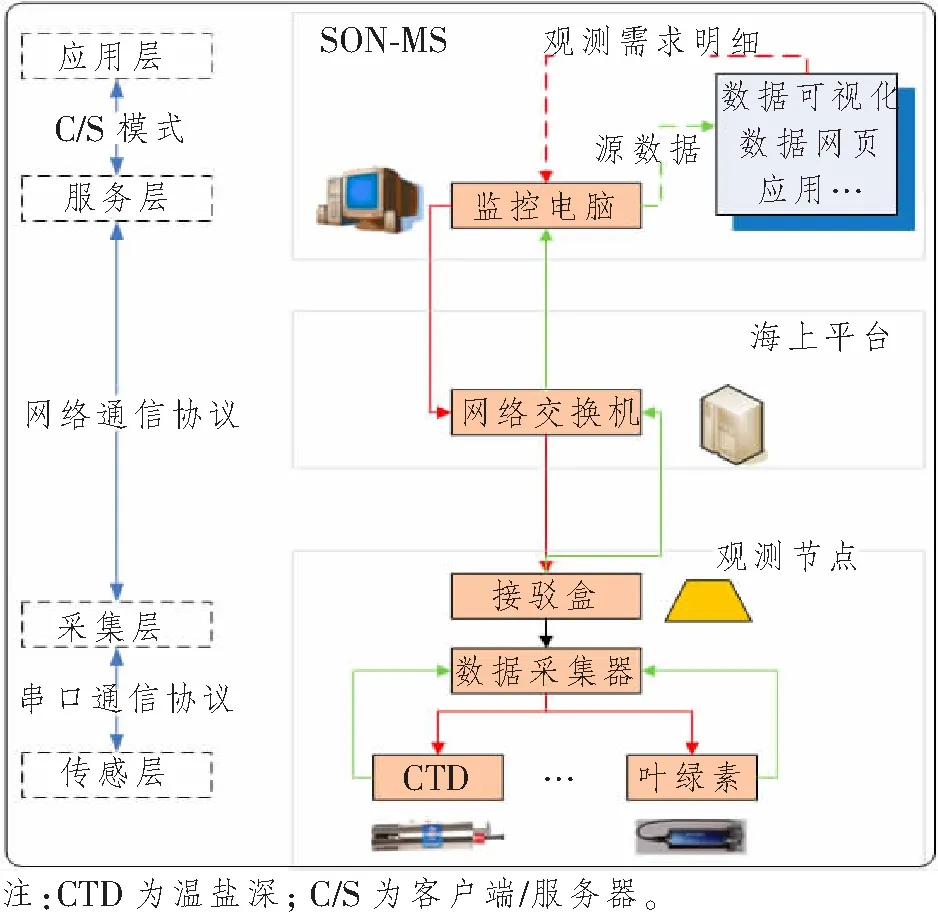
圖1 SON-MS面向信息的體系結構Figure 1 Information-oriented architecture diagram of SON-MS
2 關鍵技術及實現
2.1 數據通信
2.1.1 C/S架構及遠程通信模式
本文為萊州灣海底觀測網絡設計的遠程控制系統采用C/S架構。就C/S架構而言,對于數據流的傳遞,服務器是監控中心運行SON-MS的監控電腦,客戶端是現場的科學節點,包含接駁盒、數據采集器以及傳感器。C/S架構的通信形式是SON-MS與接駁盒以及數據采集器之間是傳輸控制協議/網際協議(Transmission Control Protocol/Internet Protocol,TCP/IP)網絡通信,而數據采集器與傳感器之間是RS232/485/422等串口通信,接駁盒與數據采集器僅有電氣連接,并無數據交互。SON-MS獲取傳感器的數據主要是借助數據采集器,數據采集器將通過串口獲取的數據打包,通過TCP/IP通信發送至SON-MS。整個系統的C/S架構以及遠程通信形式如圖2所示。
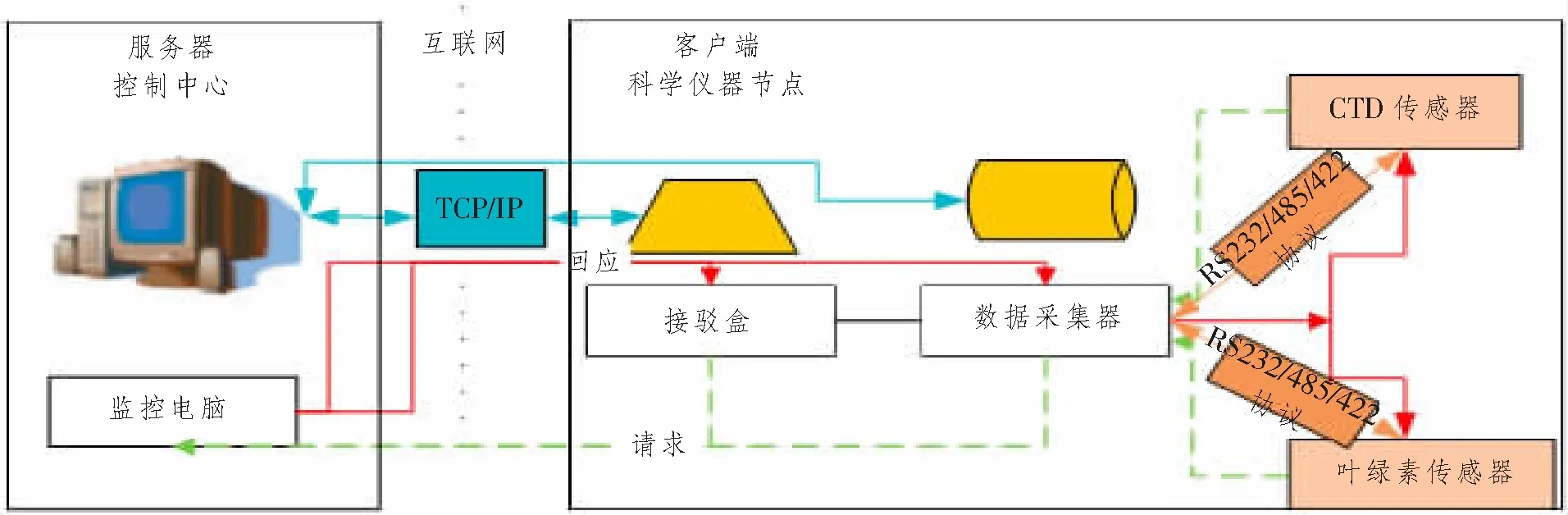
圖2 SON-MS的C/S架構以及遠程通信Figure 2 The C/S architecture of SON-MS and remote communication
2.1.2 雙向Socket網絡通信
為保證接收數據流以及發送指令流互不干擾,本文采用雙向Socket網絡通信、長連接與短連接交替使用的通信方式。接收水下設備數據的過程中,SON-MS作為監聽Socket服務器,使用Socket長連接通信技術,啟用不同的端口監聽來自接駁盒以及數據采集器的連接,并采用多線程技術,為每個水下設備建立長連接,拋出數據處理線程,實現數據的高效實時并發處理。指令下發的流程為:SON-MS是Socket客戶端,水下設備是Socket服務器,SON-MS需要發送指令時,主動連接水下服務器設備,建立當前的Socket短連接,指令發送完成并在規定的時間間隔內收到水下服務器反饋后,斷開該Socket短連接。整個Socket網絡通信流程圖如圖3所示。圖中,N為指令發送的上限次數,n為發送指令的計數,n≤N,T為單次指令下發等待反饋時間,N和T兩個參數可以依據網絡負載情況自定義,nT為指令下發完之后等待指令反饋成功的時間間隔。
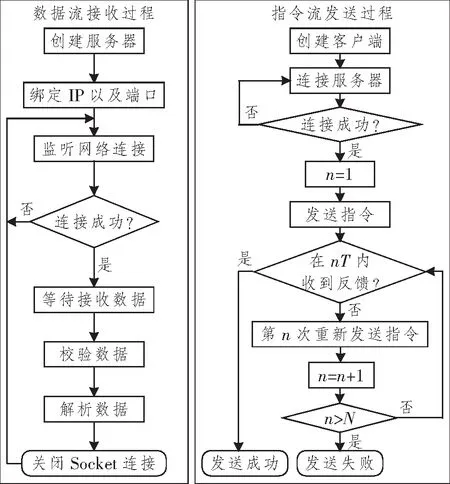
圖3 雙向Socket網絡通信流程圖Figure 3 Flow chart of bi-directional Socket network communication
2.1.3 數據流通信協議
海底觀測網絡長期在海底工作,源源不斷地產生海量數據,數據流無時無刻不在運行之中。海底不同傳感器采集的數據在協議格式和采集時間間隔等方面存在較大差異,大大增加了后續數據傳輸和處理的難度。因此,本文設計了一種傳輸主干網應用層自定義通信協議,將數據采集器采集的無規律、協議形式各異的傳感器數據進行有序封裝,封裝完成后的數據包將是格式統一的協議幀。該協議同時是后期設備實現動態管理的基礎。
該自定義協議主要由包頭、包體、校驗位以及固定結束符組成。其中包頭的長度是固定的;不同傳感器發送的原始數據包長度是不定的,數據包體的長度是不固定的;校驗位放在包體后面,采用循環冗余校驗(Cyclic Redundancy Check,CRC),長度固定為4個字節;最后為了便于整個協議的程序解析處理粘包等特殊問題,協議最后加上固定一個字節長度的結束符。固定長度的包頭主要由同步頭、數據采集器編號、協議類型、時間信息和包編號等信息組成。包體主要是傳感器等設備通過串口發送給數據采集器的原始數據包,每個傳感器所發送的數據包不同,根據每個傳感器具體的協議來進行。校驗位為包頭部分、包體部分以及結束符的CRC32校驗。固定結束符一般采用固定“#”作為協議的結束標志。
2.2 設備動態管理
海底觀測網絡長期運行過程中,不可避免會遇到傳感器設備的增刪改等問題,具體來說就是新增某類傳感器、刪除傳感器或者傳感器變更接口等需求。當遇到此類需求時,可采用重寫SON-MS代碼的方式來進行設備變更與數據解析顯示的一致性,但是這種方式顯然費時費力且不利于動態擴展,因此,基于前面的數據流通信協議,本文設計了一種全新的設備動態管理算法,使SON-MS能快速適應傳感器變更接口或者增刪改傳感器的變化。
SON-MS首先建立水下傳感器設備的元數據表格以及體現水下傳感器與其他節點映射關系的動態配置表格。水下設備元數據表格的屬性主要包括對傳感器設備的設備名稱、設備編碼、電氣參數、接口形式和協議包的正則表達式等傳感器基本信息。對于傳感器某一基本信息的維護主要通過元數據表格的維護來完成。動態配置表格存儲體現的是海底觀測網絡拓撲結構關系的信息,通過動態配置表格能清晰獲取設備所屬的數據采集器,采集器所屬的接駁盒等信息,動態配置表格維護的是海底網絡拓撲映射關系。圖4所示為設備動態管理的映射關系圖,由圖可知,在動態配置表格中可以找出存在唯一映射關系數據采集器的實際物理接口,由前述數據流通信協議可知,協議中的采集器編號與端口編號可以唯一地確定出實際的物理接口,而實際物理接口在滿足電氣參數以及接口形式條件時,可以接設備列表中的任意一個設備,即物理com接口與所接設備不存在唯一確定的映射關系。當圖4中多對多的映射關系改變時,動態配置表格也會隨之改變,由此可以確定出com接口與所接傳感器設備的確定映射關系。程序按照圖5所示的算法流程就能在水下設備元數據表格中唯一確定出所接的水下設備的編號,然后依據該水下設備編號在元數據表格中就能找出協議包的正則表達式,利用正則表達式便能解析出數據。如果需要新增某類傳感器,直接在水下設備元數據表格中進行相應屬性的維護,同樣新增傳感器所接的com接口則體現在動態配置表格中。
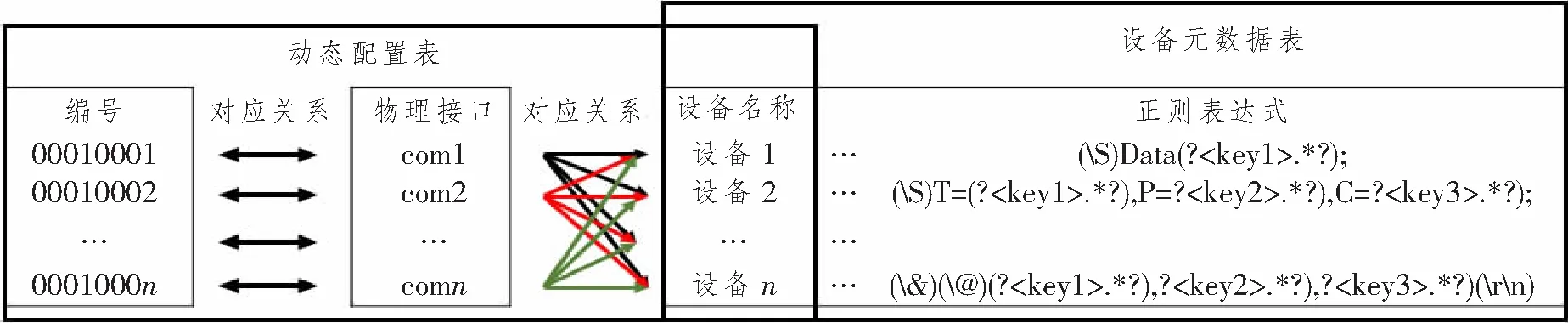
圖4 設備動態管理圖Figure 4 Diagram of equipment dynamic management
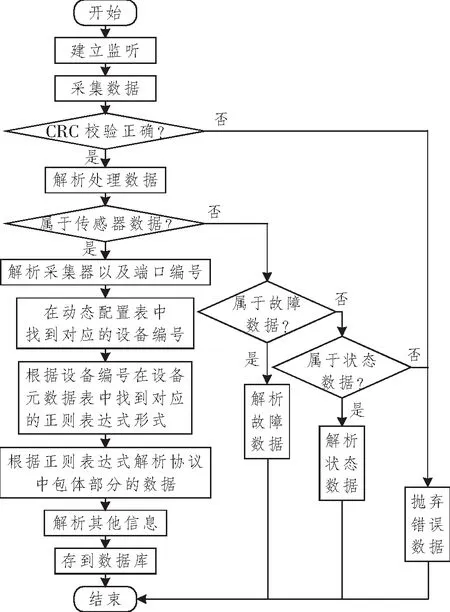
圖5 設備動態管理算法流程圖Figure 5 Flow chart of equipment dynamic management algorithm
2.3 數據質量控制
海底觀測網絡能為用戶提供長時間和大范圍的數據服務。科學數據的獲取主要是通過海底連接的傳感器獲得的,傳感器在長時間獲取數據時,可能會出現由于干擾帶來的異常數值。因此,數據質量控制主要研究如何在保留數據有效性的同時剔除掉異常數據。
本文采用一種改進的53H算法。其步驟如下:
(1) 設x(i)為獲得的傳感器數據序列,該序列共有m個數值。為從x(i)構造一個新序列x1(i),方法是取x(1),x(2),…,x(5)的中間值作為x1(3),然后舍去x(1),加入x(6),取中間值得到x1(4);以此類推,直到加入最后一個數據。顯然,x1(i)的項數比x(i)少4項。
(2) 用類似的方法在x1(i)的相鄰3個數中選取中間值而構成序列x2(i)。
(3) 最后由序列x2(i)按如下方式構成x3(i)
(4)如果有下式成立,則用x3(i)代替x(i),
式中,k為一預定值。
由運算步驟可知,序列x(i)的開始4個點和末尾4個點沒有得到有效平滑,因此本文將此算法作如下改進。
(5)將x(i)序列開始的8個點和末尾8個點反序排列生成序列x′(i),即為x(8),x(7),x(6),x(5),x(4),x(3),x(2),x(1),x(9),…,x(m-8),x(m),x(m-1),x(m-2),x(m-3),x(m-4),x(m-5),x(m-6),x(m-7)。
(6)對x′(i)序列重復前4步,形成新的x3′(i)序列,用新序列中的x3′(5),x3′(6),x3′(7),x3′(8),x3′(m-7),x3′(m-6),x3′(m-5)和x3′(m-4)分別替代x(4),x(3),x(2),x(1),x(m),x(m-1),x(m-2)和x(m-3)。
3 系統試驗
3.1 試驗場景
本項目圍繞國家“智慧海洋”工程建設的總體要求以及山東省的具體需求,在山東黃渤海重點區域進行海洋立體感知網工程建設,海底觀測網作為立體感知網的重要組成部分,布放選取在萊州灣藍色海洋牧場,為牧場保駕護航,形成智慧海洋示范。該觀測網絡于2021年8月成功布放,現已成功運行近3個多月,布放海試圖如圖6所示,萊州灣海洋牧場海底觀測網絡構成圖如圖7所示。

圖6 萊州灣海洋牧場海試Figure 6 Marine test of marine pasture in Laizhou Bay

圖7 萊州灣海洋牧場海底觀測網絡Figure 7 Submarine observation network of marine pastures in Laizhou Bay
3.2 試驗結果及分析
萊州灣海洋牧場海底觀測網絡自2021年8月布放以來,現已成功運行近3個月。SON-MS作為整個觀測網絡的重要組成部分,在實時觀測傳感器控制和數據采集方面發揮了重要作用。SON-MS在觀測網絡連續3個多月的運行期間獲得了大量的溶解氧、CTD、葉綠素和濁度等海洋科學數據。SON-MS狀態信息顯示主界面如圖8所示。SON-MS解決了本文設計的關鍵技術,具體如下:

圖8 SON-MS狀態信息顯示主界面Figure 8 The main interface for displaying SON-MS status information
(1) SON-MS具有強大的數據通信能力
萊州灣海洋牧場海底觀測網絡中的接駁盒、數據采集器、傳感器以及水下視頻已穩定運行近3個月,接駁盒、數據采集器以及傳感器獲得有效數據674 966條,數據接收成功率高達99%以上;下發指令110條,成功次數108次,指令成功率達98.2%。獲取的典型傳感器CTD曲線如圖9~10所示。CTD傳感器鹽度數值在海洋環境穩定情況下,測量值基本趨于穩定;海洋環境變化,比如漲潮落潮時,測量的深度值能夠靈活有效反應不同海洋環境變換。數據丟包率和指令執行成功率等性能指標說明SON-MS符合工作穩定性以及適應性的要求,采用的自定義數據流通信協議、雙向Socket網絡通信以及長短連接結合的通信機制能夠保證數據通信的可靠性和穩定性。
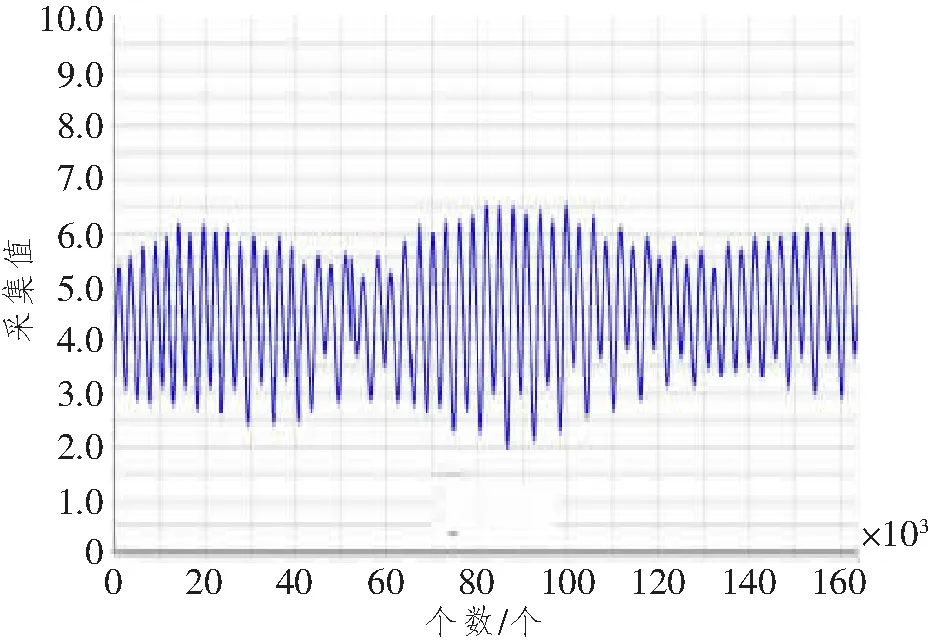
圖9 CTD傳感器深度曲線Figure 9 Depth curve of CTD sensor

圖10 CTD傳感器鹽度曲線Figure 10 Salinity curve of CTD sensor
(2) SON-MS具有靈活的設備動態管理能力
SON-MS設備動態管理的主界面如圖11所示,最左側顯示的是海底網絡的樹形拓撲關系,如果需要在拓撲關系中對設備進行增刪改等動態管理,只需要鼠標右鍵列出相應的菜單選項,這樣設備的動態管理只需要在軟件界面進行維護,而無需后臺更改代碼,形式靈活,常規的配置可以在2 min內完成,配置完成之后,SON-MS程序后臺便能按照動態管理算法解析出數據。

圖11 設備動態管理主界面Figure 11 Interface of equipment dynamic management
(3) SON-MS具有較高的數據質量
以海洋牧場中較為關心的溶解氧采集到的頻率為例,如表1所示,未進行數據質量控制時異常記錄有42個,進行質量控制之后異常數據降低為3個,異常值的剔除率達到93%。圖12所示為溶解氧頻率數據曲線對比圖。由圖可知,數據質量控制算法在保留原始數據曲線特性的基礎上,對原始頻率曲線進行了有效平滑,而且剔除了具有明顯錯誤的異常值。
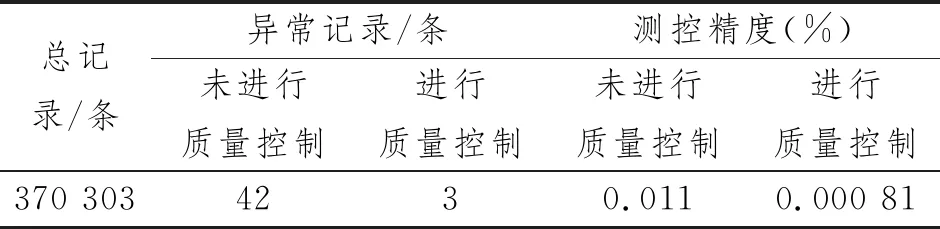
表1 萊州灣遠程監控系統傳感器數據錯誤率分析
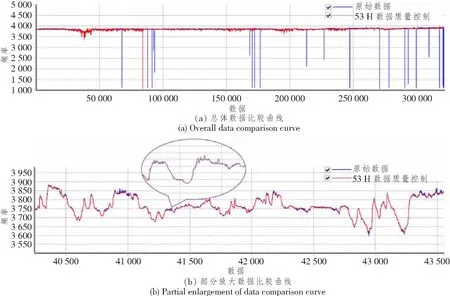
圖12 溶解氧頻率數據曲線對比圖Figure 12 Comparison of dissolved oxygen frequency data curves
4 結束語
本文介紹了SON-MS的系統設計以及開發進展,并介紹了SON-MS在萊州灣海洋牧場觀測系統的實際應用。本文分析了SON-MS需求,建立海底觀測網絡的控制體系結構,通過體系結構梳理出整個網絡中的數據通信、設備管理以及數據質量控制3個關鍵技術,并給出了具體的實現算法。雖然本文描述的技術各個部分并不一定是新的,但整個系統是架構、遠程通信、接駁盒、數據采集器、傳感器設備接口、網絡配置、控制和面向對象編程的綜合體,SON-MS是連接用戶與海底設備的紐帶,也是觀測能夠順利進行的保障。
此外,本文提出的方法可以為海底觀測網絡提供有益參考,像海底觀測網絡設備動態管理方法也可以擴展到其他原位海洋觀測傳感器系統中。在未來的一些升級中,本文的設備動態管理方法在滿足傳感器電氣接口等物理要求下,軟件上可以做到即插即用。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:26:08
電信科學(2016年10期)2016-11-23 05:11:56
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
