電容層析成像技術研究進展
2022-10-23 14:00:16姚佳烽車權齊李志偉劉凱
機械制造與自動化 2022年5期
關鍵詞:測量
姚佳烽,車權齊,李志偉,劉凱
(南京航空航天大學 機電學院,江蘇 南京 210016)
0 引言
過程層析成像(process tomography,PT)技術是一種以非侵入性的方式測量感興趣區域的過程化參數并獲得容器反應過程或管道內部流動特征的技術[1],包括電阻和電容層析成像(electrical resistance and electrical capacitance tomography)技術、X射線斷層掃描(X-ray computed tomography,X-CT)技術、磁感應斷層掃描(magnetic induction tomography,MIT)技術、超聲過程層析成像(ultrasonic process tomography,UPT)技術等。PT技術涉及到多個應用領域的研究,例如工業上的多相流參數監測、石油勘探、無損檢測等,醫學上的人體肺部換氣成像、影像診斷、腦部成像等[2-3]。
電容層析成像技術(electrical capacitance tomography, ECT)屬于PT技術的一種,是通過測量管道內部兩相流或多相流的介電常數分布反映介質分布的過程,主要應用于工業中循環流化床的氣固流動檢測、水平管道中油/水兩相流的檢測和火焰燃燒檢測等[4]。ECT技術具有非侵入性、無輻射、成本低、響應速度快等特點,被認為是一種最具有潛力的過程層析成像技術之一。
近些年來,ECT技術發展迅速,在工業和生物醫學領域取得了重要成就。本文主要從ECT技術的新型電容傳感器、硬件設備、圖像重建算法以及技術應用等方面進行總結,并對其未來發展趨勢進行了探討和展望。
1 電容層析成像設備
20世紀八九十年代,曼徹斯特大學BECK教授的研究團隊首次搭建了一套基于8電極傳感器的電容層析成像系統[5],如圖1所示,并在之后開發了一套圖像重建算法的軟件工具,為后續的研究打下了基礎。電容層析成像系統主要由電容傳感器、數據采集模塊和圖像重組單元構成。由電容傳感器感受微弱的電容信號,經C/V轉換電路、放大電路、濾波電路和A/D轉換電路等轉換為計算機可識別的二進制信號,再通過圖像重建算法實現可視化成像。ECT成像技術經過30多年的發展,已經形成較為完善的軟硬件系統。
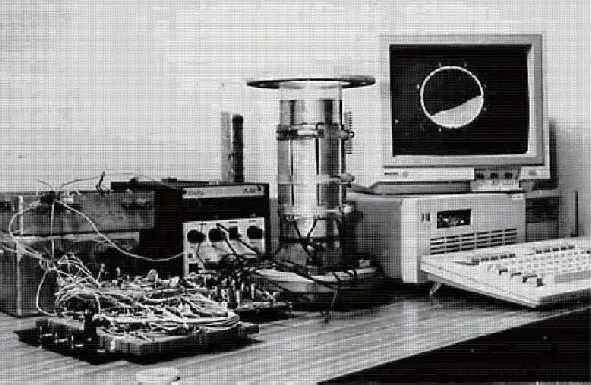
圖1 首臺ECT系統
1.1 ECT傳感器
電容傳感器是ECT系統的重要組成部分,在結構上主要分為二維傳感器和三維傳感器。如圖2(a)所示,傳統的二維結構傳感器主要由分布在管道周圍同一橫截面上的陣列電極、橫向和縱向屏蔽網絡組成,在此基礎上布置多層電極就形成了三維結構傳感器。傳感器的性能直接影響到電容測量和敏感場的分布,最終影響到圖像重建的質量。對于電容傳感器的優化設計,大多數研究者主要是從電極形狀、數量和尺寸等參數上進行改良和對比[6-7]。但是在實際工業應用上,傳感器自身參數會受到工作條件的限制。因此,基于傳統結構設計新型電容傳感器十分重要。
分布在管道周圍外部的ECT傳感器往往不能滿足對中心區域的成像效果。2019年,CUI Z Q等提出了一種具有8個外部電極和8個內部電極的ECT傳感器[8],如圖2(b)所示,8個內部電極放置在被測管道的交叉平面上,傳感器的橫截面測量區域可以看作是4個相等的扇形區域,每個扇形區域被6個電極包圍。通過數值模擬和實驗表明,這種內外部電極結合的方式相對于傳統的12電極傳感器,在測量靈敏度和成像質量上都有明顯提高,但是由于侵入測量,會對管道內部的流體產生干擾,并且其潛在應用性也會受到限制。如何最小程度地減小內部結構對流體的干擾是這類傳感器研究的方向。
3D傳感器相比于2D傳感器可以獲取流體的體積圖像,這種3D-ECT也稱為電容體積斷層掃描(electrical capacitance volume tomography,ECVT)技術,對于研究像流化床中氣泡大小、速度以及運動軌跡等這類問題具有重要價值[9]。由于3D-ECT獲取的獨立投影數據更多并且相距較遠的電極層之間的信號更加微弱[10],這對于圖像重建過程和高質量成像是一項嚴峻的挑戰。因此,3D傳感器的設計參數備受關注,比如不同平面的電極數量、電極角度分布、電極長度等[11-13]。2020年,SHEN J J等研究了具有不同排列和不同形狀電極的3D-ECT傳感器[14],如圖2(c)所示,包括交錯排列的菱形、圓形、六邊形電極傳感器以及直線排列的矩形電極傳感器。結果表明,與傳統矩形電極相比,具有交錯排列電極的3D-ECT傳感器可以減少對被測信號的干擾,有助于提高成像質量。
單模態斷層掃描適用于兩相流檢測,但是無法提供多相流中各組分的分布信息,例如氣-液-固(G-L-S)和氣-油-水三相流等。雙模態斷層掃描技術已經被開發,WANG Q等提出了一種雙模態電阻和電容斷層掃描(ERT-ECT)的新方法[15],用于可視化水平管道中的氣-油-水流動;STAVLAND S H等采用雙平面電容和伽馬射線斷層掃描(ECT-GRT)技術進行多模態氣液兩相流速度的測量[16],將ECT高速采集速率和GRT高空間精度的優勢互補,提高了測量的時間分辨率和空間分辨率。但是這兩種方法只是在兩個臨近平面上實現了兩類傳感器的組合測量,結構較為復雜。CUI Z Q等研發了一種集成的雙模態電容和電磁斷層掃描(ECT-EMT)傳感器[17],可實現對G-L-S三相流成像。如圖2(d)所示,傳感器主要由分布在管道同一橫截面的陣列電極和陣列線圈組成,EMT平面線圈放置在ECT電極的外側并形成了對內側電極的屏蔽,對電容測量的影響很小。但是這種傳感器的主要局限性在于,當激勵信號的頻率過高時,ECT電極會對EMT測量產生很大的影響。因此,需要限制激勵頻率和數據采集速率。
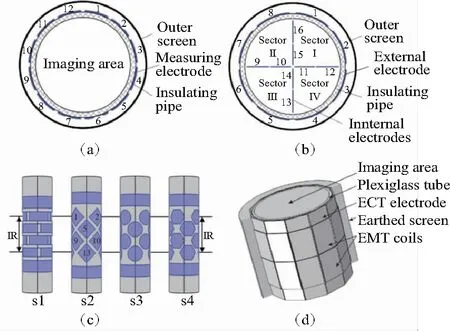
圖2 新型傳感器
ECT系統的電容傳感器正朝著三維化、集成化和多模態方向發展。新型傳感器的優化設計對于減小測量誤差、提高圖像質量具有重要意義。
1.2 ECT硬件設備
電子硬件設備主要包括電容測量電路、多路復用電路和控制處理單元,其功能是實現電容信號的采集、轉換和傳輸以及控制通信等,這對于測量分辨率和數據采集速度提出了較高的要求。
常見的電容測量電路有直流充放電電路、交流鎖相放大電路和電容數字轉換器(CDC技術)等。由于電容信號一般在pF級別,測量誤差較大,因此如何減小噪聲的干擾是一個關鍵問題。YANG W Q等提出了一種高靈敏度的交流電容測量電路[18],基于該電路的ECT系統測量精度達0.01 pF,測量誤差為0.000 2 pF。STYRA D對基于交流激勵的電路進行了改進[19],如圖3所示,采用帶有開關反饋電荷放大器實現信號的轉換,靈敏度有所提高,但是會導致電路中存在相對較大的雜散電容。對于測量精度、測量范圍和響應時間等參數的優化,還需要進行更廣泛的研究,以便完善系統的功能和完整性。
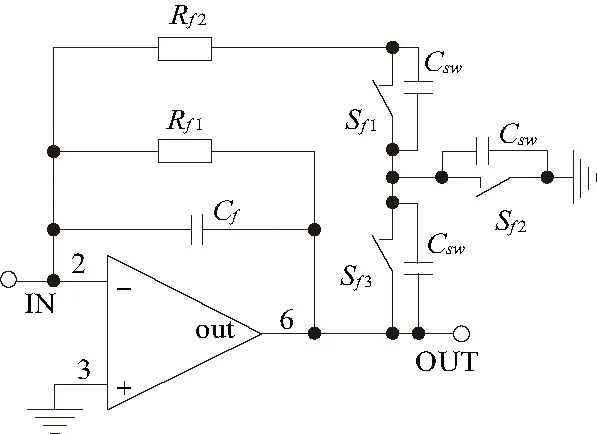
圖3 帶有開關反饋的電荷放大器
在ECT系統中,每個電極存在激勵、測量和接地3種模式。這些電極通過多路復用電路開關被連接到電壓源和電容測量電路的兩端。數據采集方式分為單通道串行和多通道并行兩種。單通道串行采集是由一個電壓源激勵,其余電極依次進行采集,這種方式只需要一個數據采集端(DAQ),成本低,傳輸便捷,但是會降低采集速度和時間分辨率;多通道并行采集是由一個電壓源激勵,其余電極同時采集,這種方式的時間分辨率高,但是需要多個DAQ,系統復雜、成本高,數據傳輸負擔加重。GAO R X等提出了一種多激勵并行采集模式,也稱MECap系統,如圖4所示[20],以8電極傳感器為例,使用4個信號發生器對4個電極同時施加不同頻率的激勵電壓,其余4個電極同時進行采集,采集的信號經過電荷放大器后,通過8選4多路復用器進入到4個鎖相放大器(LIA),每個LIA由低通濾波器、移相器和模擬乘法器組成,通過與相應的函數發生器進行同步并根據指定的頻率對輸入信號進行濾波。這種方法比傳統ECT系統的成像速度更快,更準確,并且具有較高的靈敏度。
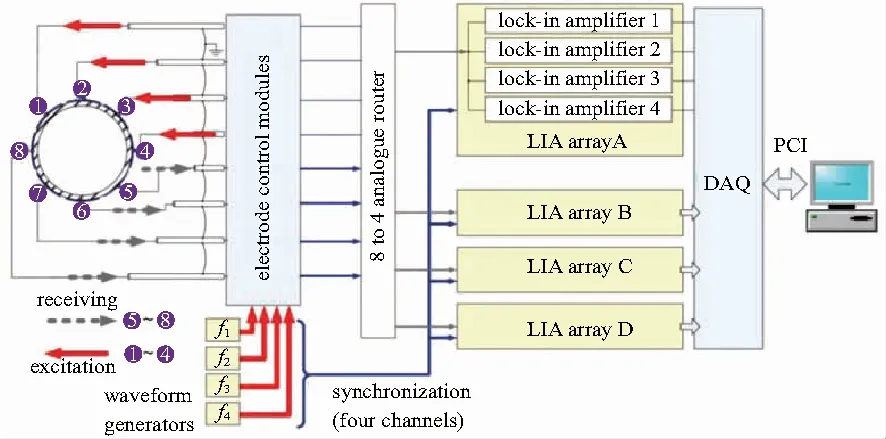
圖4 MECap系統原理圖
數字信號處理器(DSP)通常作為ECT系統數據處理和控制的核心,是一種可編程的芯片。WANG H X等采用TMS3206416處理器對16電極的ECT系統進行控制,圖像幀率在200 fps左右。最近,FPGA處理器被廣泛使用,系統配置如圖5所示[21],其優點是可以托管重建算法的大部分控制/數據流,不需要一系列順序存儲器的訪問。2015年,FAJAR FIRDAUS A等提出了一種基于FPGA技術的ECT層析成像算法的新架構[22],可同時執行3種圖像重建算法。大量仿真表明,當重建算法在基于2.53 GHz 的奔騰處理器上運行時,所提出的架構計算速度提升了3個數量級。2018年,MAJCHROWICZ M等開發了一種多圖形處理系統(GPU)、多節點分布式的3D-ECT成像系統[23],與之前開發的基于Xgrid平臺的分布式系統進行了比較,其處理速度明顯提高。
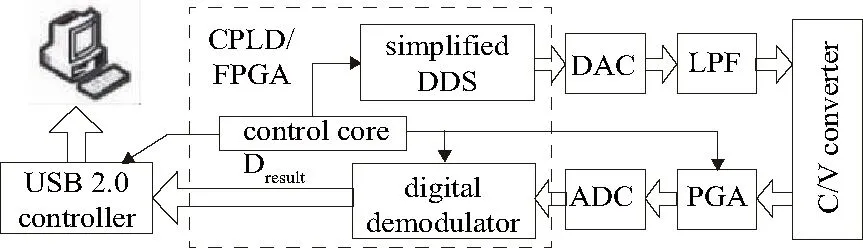
圖5 基于FPGA測量的系統配置圖
2 ECT圖像重建算法
ECT技術的圖像重建實質是對逆問題的求解,即根據電容傳感器測量的電容值求解敏感場內介電常數的分布。由于測量的獨立投影數據遠遠少于圖像的像素點,導致其解不唯一,屬于欠定性問題。ECT系統本身固有的軟場特性會造成求解的非線性問題,而電容值微小的變化會引起介電常數的分布發生很大變動,這是病態性問題。面對圖像重建這三大問題,選擇合適的處理算法直接影響到成像質量的好壞。ECT技術的圖像重建算法理論上可分為3類:非迭代算法、迭代算法和智能算法。
電容值C與介電常數ε分布的關系可以表示為[24]
(1)

將N個電極測量的M個獨立投影數據代入到式(1)并對其進行線性化、離散化和歸一化處理后得
C=SG
(2)
式中:C為歸一化的電容值矩陣,m×1維;S為歸一化的敏感場矩陣,m×n維;G為歸一化的介電常數分布矩陣,也稱像素灰度值矩陣,n×1維。
由電容值矩陣C和敏感場矩陣S求解介電常數矩陣G的分布即為ECT的圖像重建。
2.1 傳統算法
非迭代算法和迭代算法是基于線性模型的ECT圖像重建算法[24]。非迭代算法主要有線性反投影(LBP)算法和正則化方法[25-26]。迭代算法主要有代數重建技術(ART)、同步迭代重建技術 (SIRT)和Landweber迭代法等[27-28]。本文主要對兩類算法中具有代表性的Landweber迭代法和正則化方法進行了介紹和總結。
Landweber是一種類似于優化理論中最陡梯度下降法的迭代算法,其迭代公式為[29]
Gk+1=Gk+αkST(C-SGk)
(3)
式中αk為迭代步長,為減小計算量,一般設為固定值。
Landweber算法具有較高的成像精度和速度而被廣泛地應用[30]。Landweber算法的局限性在于收斂性差。為改善其收斂性能,一些研究者給出了改進措施,例如,采用投影法和更新靈敏度矩陣減少迭代次數[31];將PI控制器與Landweber方法集成(Landweber-PI)[32],改善半收斂性,提高穩定性和圖像質量;在Landweber中加入正則項,減小計算量,提高收斂速度[33];通過Landweber算法與弛豫因子和迭代次數的自適應選擇提高圖像重建的精度和效率[34]。還有研究者通過改善收斂條件實現快速成像以及從共軛梯度角度對Landweber法進行延伸[35-36]。
正則化方法的基本思路是在先驗條件的約束下,用一組與原不適定問題相“鄰近”地適應問題的解去逼近原問題的解。其表達式為
(4)
式中:λ為正則化系數;L為正則化矩陣。
式(4)的近似解為
(5)
正則化最小二乘問題的一般形式是:
(6)
式中R(G)為正則化項。
正則化方法可以分為投影法和懲罰法。投影法是將逆問題的解投影到一個特定的子空間,例如截斷奇異值分解法。懲罰法是在目標函數中添加一個正則化項,保證解的穩定性。在懲罰法中,常用的正則化方法有Tikhonov正則化、Total Variation (TV)正則化和first-order Tikhonov (FOT)正則化等[37]。Tikhonov正則化是解決欠定性逆問題最常用的手段之一,基于標準Tikhonov正則化的解為[24]
(7)
式中:μ為Tikhonov正則化因子;I為單位矩陣。
Tikhonov正則化質量主要取決于參數μ,通常情況下μ是根據經驗值來選擇的。
TV正則化方法是用來保持圖像邊緣的不連續性,但是受噪聲影響較大,其正則化項可表示為[37]
(8)
FOT正則化方法可以提高成像的穩定性,但是導致圖像邊緣過度平滑,其正則化項可表示為一階微分算子的形式[37]:
(9)
這些傳統的算法大部分都是基于線性模型,運用迭代或者非迭代方法去尋找問題的最優解。但是當成像目標較為復雜、數據量過大時,這些方法在運算成本和效率上會大大降低。而基于非線性模型的算法,其圖像重建的速度非常慢,無法滿足時效性的要求。
2.2 人工智能和機器學習算法
近些年來,人工智能算法和機器學習理論蓬勃發展,應用于各項領域。ECT技術領域的研究人員也將這些基于深度學習的方法擴展到解決這類非線性的逆問題上,這也是圖像重建算法未來的發展趨勢。
基于神經網絡的學習算法在對非線性信號的處理中展現出了良好的效果。2012年,LI J W等提出了一種基于徑向基函數(RBF)神經網絡的圖像重構方法[38],通過仿真軟件獲得測量數據并和BP神經網絡算法進行了比較,每個神經網絡具有180個樣本訓練集。結果顯示,RBF方法速度更快,精度更高。2018年,ZHENG J等提出了一種自動編碼神經網絡來求解ECT的圖像重建問題[39],該網絡包括一個編碼器網絡和一個4層的解碼器網絡,共有40000對樣本訓練和測試數據集,圖像重建效果較好,為解決ECT成像問題提供了可行性。2019年,CHEN E等在自動編碼模型的基礎上使用模塊化深度神經網絡(MDNN)進行圖像重建,并應用到了多級重建方案中[40]。2021年,DEABES W等提出了一種基于長短期記憶(LSTM)深度神經網絡的ECT重構算法[41],簡稱LSTM-IR算法,如圖6所示。通過對創建的16萬對大規模仿真數據集進行訓練和測試,結果表明,LSTM-IR方法能夠更快速、精確地創建ECT圖像。
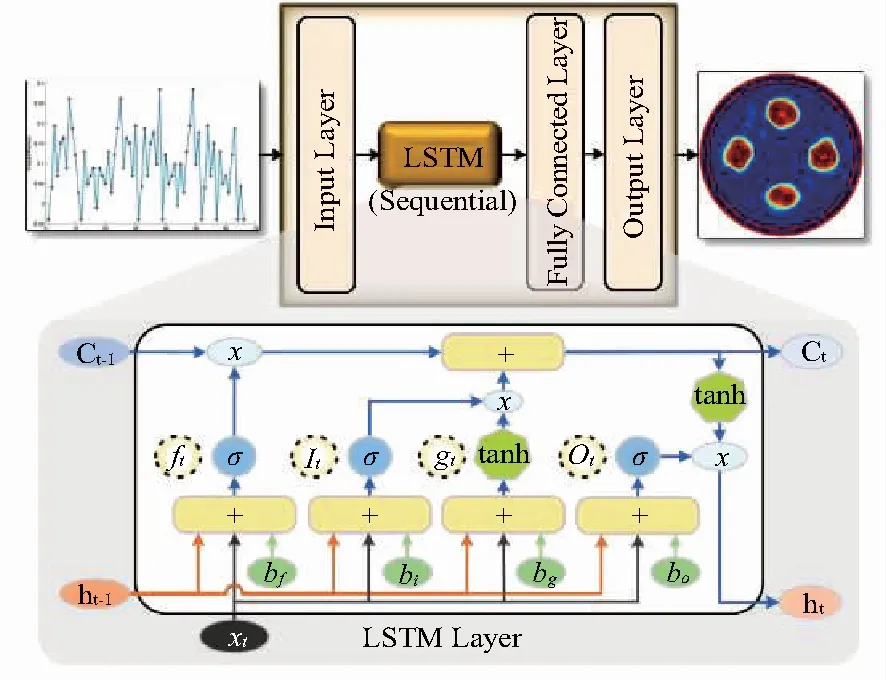
圖6 LSTM-IR算法體系結構圖
一些其他基于機器學習的算法也有被開發。2012年,WANG H M等提出了一種最小二乘支持向量機(LSSVM)結合細菌菌落趨化性(BBC)的算法[42],用于檢測燃燒器噴口過渡流狀態的細微變化。通過LSSVM建立的從測量電容到圖像灰度值的非線性映射模型具有良好的非線性學習能力和較高的收斂速度,采用具有全局優化和快速收斂能力的BBC算法來構造核參數的目標優化函數,最后收集了112組訓練樣本集并實現了圖像重建。2017年,LEI J等提出了一種基于深度學習的反演方法[43]。成像包括三個階段:第一階段,從重建圖像到真實圖像的先驗信息被抽象并存儲在深度極限學習機器(DELM)中;第二階段,構建了一個成本函數,用于封裝深度學習模型和成像目標領域先驗的專業知識;第三階段, 將split Bregman (SB) 算法和快速軟閾值迭代(FIST)算法組合成一種新的數值方法求解。這種算法減少了圖像的偽影和變形,但是在計算效率和實際應用等問題上還需要進一步研究。
訓練樣本量對機器學習的結果至關重要。2017年,ZHENG J等提出了一種用于ECT圖像重建的數據生成平臺[44]。在MATLAB 上構建了圖形用戶界面(GUI),并與COMSOL Multiphysics 5.0中的ECT傳感器模型配合使用,目前已經生成了37 850對樣本數據集。這種數據生成平臺可以生成包括任何流型中介電常數分布和相應電容數據的大規模數據集,這對于基于機器學習方法的探索和測試以及未來基于大規模數據集來研究新的ECT圖像重建算法具有重要意義。
3 ECT技術應用
ECT廣泛應用于工業中的多相流檢測,例如氣固兩相流中顆粒濃度和速度的動態分布、氣泡大小和氣泡動態特性以及材料中的水分分布等[45]。在生物醫學領域,ECT技術在人體組織成像方面表現出了潛在的應用價值,像乳腺癌掃描和牙齒成像檢測等[46]。
3.1 工業應用
流化床是一種利用氣體或液體使固體顆粒處于懸浮運動狀態的反應裝置,主要分為氣固流化床和液固流化床,是ECT技術的典型應用。循環流化床(CFB)是一種氣固流動系統,常用于鍋爐中的煤燃燒和煤氣化[47]。由于氣固流動動力學會影響煤的燃燒效率和污染排放,因此對流體流動參數和運動狀態的測量非常重要。ZHAO T等使用ECT系統對垂直管道中流體催化裂化過程中催化劑顆粒的運動速度和分布等信息進行成像[48];也有研究者比較了ECT和壓力波動測量這兩種方法,對流化床內最小流化速度、最小流速、主頻率和氣泡上升速度等流動參數進行測定,結果表明兩種測量方法的結果大致吻合[49]。此外,還有研究者對流化床中不同區域的流動狀態進行了測量,如圖7所示,包括立管底部的密集流動、立管頂部的稀薄流動、旋風分離器入口處的流動、旋風分離器中旋轉和湍流流動以及循環密封腔中的流動等[47]。ECT在制藥流化床、錐形噴嘴床和滴流床等也有相關應用[50-51]。
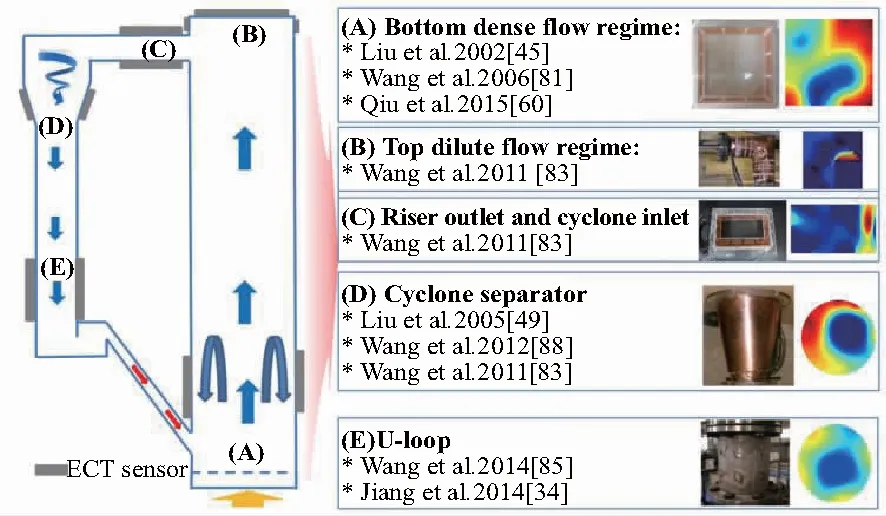
圖7 CFB的5種典型流型
ECT的大多數應用都集中在“冷”的氣固流動上,而對于工業上的火焰燃燒檢測研究較少。2018年,LIU J等使用ECT結合數據融合分析進行了火焰成像[52],但是只是對燃燒過程的定性評估,很難獲得詳細的定量信息。這是因為火焰的介電常數來自于燃燒過程中產生的化學成分、火焰內部的溫度和壓力以及某些等離子,這些因素都會影響火焰的介電常數和電導率,很難從單方面測量中獲得介電常數分布。
3.2 醫學應用
ECT技術因其無輻射和快速成像的特點,適用于醫學上的實時成像檢測。2012年,TARUNO W P等使用(ECVT)成像技術對人體乳房內的癌細胞塊進行實時3D成像[53],重建的圖像在健康和異常組織之間產生了明顯的差異,有望作為用于乳腺癌篩查的快速、高效、非輻射技術的替代方案。次年,該研究團隊首次提出了一種基于ECVT的人腦活動實時成像方案[54],如圖8所示,通過測量人腦活動產生的電信號重建腦信號的體積圖像。結果表明,ECVT能夠檢測與人類運動和語言功能相關的大腦活動。
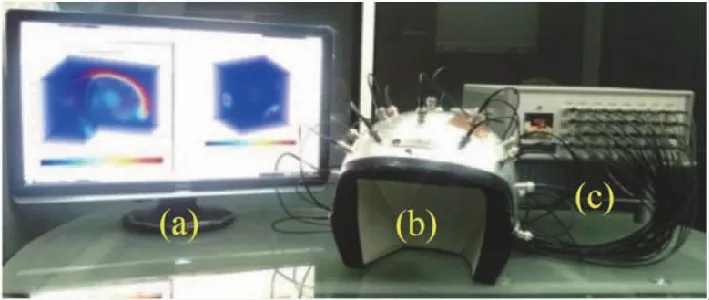
圖8 ECVT人腦檢測系統
2017年,REN Z等提出了一種使用ECT可視化牙齒表面的新方法[55]。該項研究工作者考慮到口腔空間和牙齒尺寸等方面因素的限制,設計了一種平面開放結構的ECT微型傳感器,如圖9所示,在柔性印刷電路板(FPCB)上制造了2×2陣列和2×3陣列的微型電極,檢測時通過夾具組件將傳感器固定在口腔內牙齦表面的兩側,然后使用基于阻抗分析儀的ECT系統測試單個前臼齒,并運用LBP和Landweber迭代算法實現了對單齒橫向和縱向截面的圖像重建。未來,這項工作主要集中在用頜骨成像目標牙齒和導航牙髓儀,確定牙科器械的位置。有望成為一項用于牙髓治療的實時成像技術。
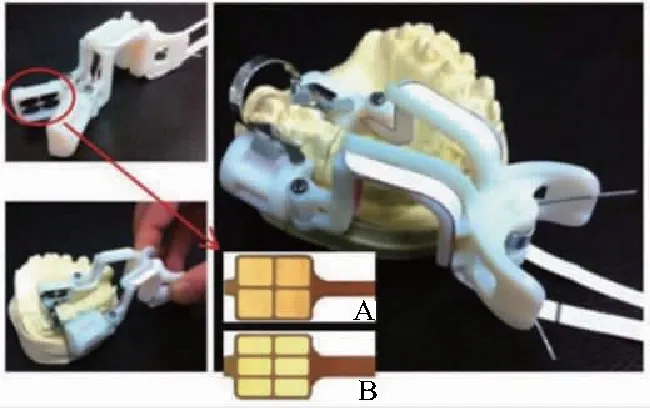
圖9 FPBC傳感器和牙齒夾具
4 ECT的發展趨勢
ECT技術作為過程層析成像領域的熱門課題,受到越來越多學者的關注。對于ECT技術的發展趨勢,主要呈現在三個方面:設備上趨向小型化、智能化;人工智能和機器學習算法將成為主流算法;應用方向將逐步拓展到生物醫學領域。
1)小型化、智能化
小型化是目前大多數工業設備的發展方向。應用于工業上的ECT傳感器,其直徑通常>1 m,測量系統體積龐大復雜、檢測維修費用高,并且傳感器的電極間距過大,會導致測量的信號微弱,引起較大的誤差。而設備的小型化會大大降低成本,這需要從傳感器和硬件設備的結構、尺寸等角度進行優化改良,便攜式的ECT系統將會帶來更多領域的潛在應用[55]。ECT系統過程層析成像的特點使其在成像速度上具有一定的限制,這也是其他過程層析成像技術普遍存在的問題。隨著GPU系統和5G技術的發展,硬件設備趨向智能化、自動化,這對多模態成像以及多項PT技術的融合具有重要意義。
2)人工智能和機器學習算法
大數據時代的發展離不開人工智能和機器學習,這些算法已經較為成熟,能夠對圖像進行快速地分析和分類。基于機器學習的算法可以大幅度提高成像質量,并且在控制回路中對實現快速反饋和決策提供了強大的支持。訓練樣本量是機器學習算法的重要基礎,因此,通過仿真模擬建立大數據生成平臺也是一項具有挑戰性的工作。
3)生物醫學發展
ECT技術的非侵入性、無輻射、響應快等優勢在生物醫學領域表現出良好的發展態勢。人體的某些組織器官在介電常數上具有顯著特性,例如大腦活動產生的電信號、腫瘤組織以及牙齒等。也有些研究者通過嘗試利用技術融合的方法應用于醫學上的檢測,例如目前曼徹斯特大學和千葉大學正在進行一項聯合研究,通過ECT和EIT的組合來診斷淋巴水腫[46]。另外,成本低將會是ECT在醫學成像技術中的競爭優勢之一。
5 結語
ECT技術的理論研究已經較為成熟,并且在工業領域也有廣泛的應用,但是由于實際因素以及圖像重建的病態問題等,還需要對硬件和算法上進行改進和優化。本文針對ECT系統中新型電容傳感器、硬件設備、圖像重建算法和技術應用等方面的基本框架和最新研究進展進行了總結和分析。目前,ECT硬件設備正朝著三維化、小型化、智能化和多模態方向發展,獲取更多、更準確的圖像信息成為了大多數研究者努力的方向。圖像重建算法更趨向于人工智能和機器學習,大規模訓練樣本的需求也促成了數據生成平臺的構建。未來,隨著5G技術和成像軟件的發展,ECT系統在成像速度和質量上將會明顯提高,并以其無輻射、成本低等優勢逐漸拓展到生物醫學領域的研究和應用。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
