模擬樣機技術在轎車平順性優化的應用
2022-10-31 08:40:16孫銀銀
農業裝備與車輛工程 2022年5期
孫銀銀
(541004 廣西壯族自治區 桂林市 桂林電子科技大學 信息科技學院)
0 引言
汽車平順性研究已經成為車輛設計制造的重要內容,該指標對駕駛人員的舒適性影響較大。例如長時間駕車過程中路面平順性較差,駕駛員容易注意力分散,從而引發交通事故,對車輛行駛安全性影響巨大[1-2]。同時車輛在障礙路面上行駛時承受較大沖擊載荷,懸架性能如果較差則會損害乘員乘坐體驗和身心健康[3]。車輛平順性受多因素制約,尤其是各部件的布置以及裝配參數的選擇,現代轎車結構設計復雜多樣,對車輛相關性能的檢測精度和試驗有了更高的要求[4-5]。
本文運用HyperMesh 軟件對懸架橫擺臂進行柔性化處理,獲得真實反應轎車行駛狀態的柔性體前后懸架下擺臂模型,并在ADAMS/Car 環境中對所建整車剛柔耦合模型進行平順性仿真,分析目標車型駕駛員質心各軸向的加速度響應曲線及功率譜密度結果曲線,在結果曲線中得到目標車型較大的共振峰頻率,并進行靈敏度分析較大的硬點坐標,優化影響較大坐標,提高車輛行駛平順性。
1 目標車型整車系統模型
研究對象為國產某車型前驅動式轎車,建模整車基本參數見表1,發動機采用前置前驅布置形式,車身采用承載式車身,麥弗遜式前懸架,雙橫臂式后懸架,前軸為驅動轉向軸,后軸為傳動軸。建模時將發動機視作剛體,整車為六自由度。在前后懸架上增設橫向穩定桿,安裝在車架和控制臂之間,保證車輛在轉彎時懸架有較大的橫向側傾角剛度,大幅提高車輛行駛安全。建立仿真試驗整車剛性模型系統如圖1 所示。
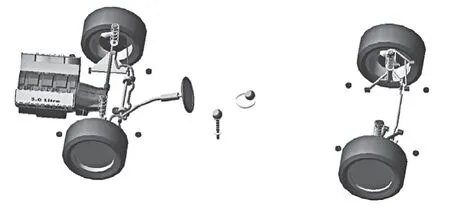
圖1 整車剛性體模型Fig.1 Vehicle rigid body model
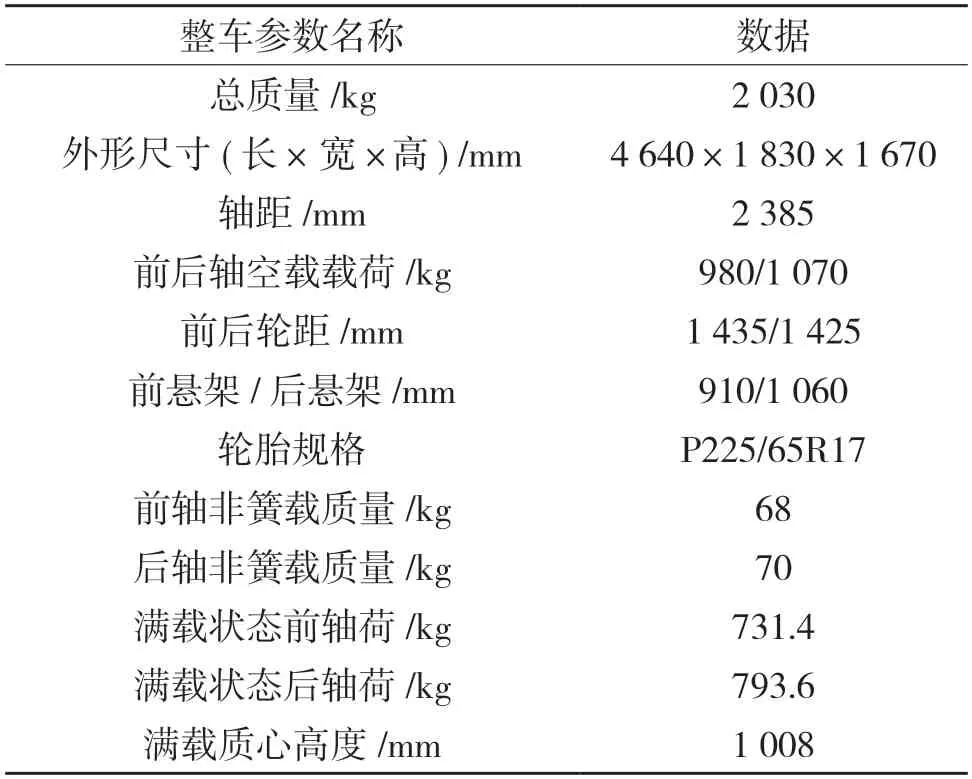
表1 整車基本參數Tab.1 Basic vehicle parameters
2 目標車型剛柔耦合模型建立
2.1 懸架橫擺臂有限元模型建立和模態分析
在HyperMesh 有限元軟件中建立橫擺臂三維模型并進行網格劃分和參數的定義。遵循有限元網格劃分相關標準和規則[6],設置前懸架劃分節點15 672 個,單元總數為19 111 個;后懸架下擺臂節點12 407 個,單元總數為17 842。最終得到的有限元模型如圖2 所示。
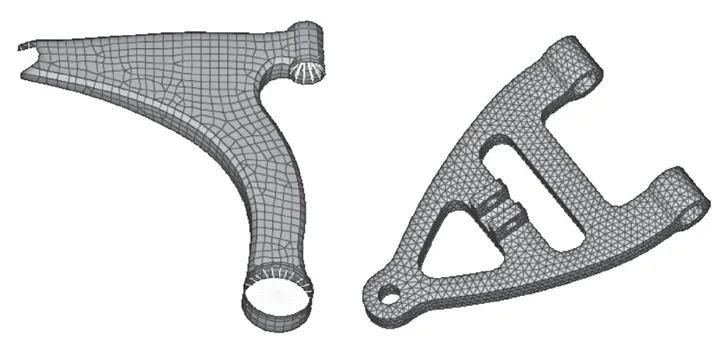
圖2 前后懸架下擺臂有限元模型Fig.2 Finite element model of front and rear suspension lower arm
利用HyperMesh 軟件中的OptiStruct 模塊對前后懸架下擺臂限元模型進行模態分析,即測試模型在靜載荷狀態下構件的固有頻率[7]。在主菜單上選擇分析求解方法為Block Lanczos,設置仿真頻率為0.01~100.00 Hz,提取14 階模態,提取7~21 階模態測試結果見表2。
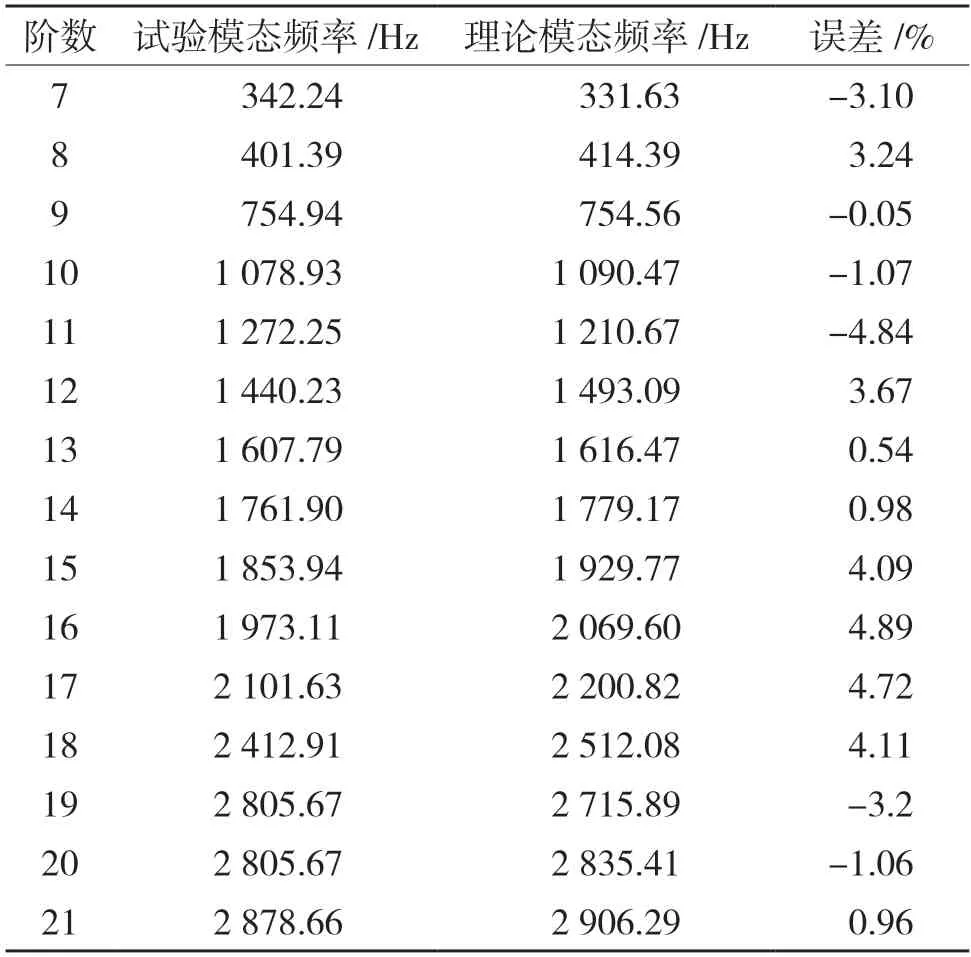
表2 前后懸架橫擺臂模態分析結果Tab.2 Modal analysis results of front and rear suspension yaw arm
由表2 的計算結果可以看出,前后懸架下擺臂的模態數值均大于300 Hz,遠大于汽車整車固有模態100 Hz 和路面不平時車身振動頻率范圍[8],并且理論誤差與試驗誤差小于5%,因此建立的模型符合標準要求,所建下擺臂有限元模型能準確反映構件實際結構特性。
2.2 整車剛柔耦合系統
將HyperMesh 軟件中的模態分析結果信息另存為MNF 格式文件[9],并導入ADAMS/Car 模塊替換剛性模型中的前后懸架橫擺臂構件,生成整車剛柔耦合模型如圖3 所示。

圖3 前懸架剛柔耦合模型Fig.3 Rigid flexible coupling model of front suspension
考慮到橫擺臂承載和柔度遠大于其他機械結構件,對聯合仿真實驗作如下說明:(1)除輪胎、橡膠襯套、阻尼及彈性元件外,忽略其他相關構件的尺寸、形狀變量;(2)忽略所有運動副相對運動的摩擦阻力;(3)轉向輪空載靜態理想定位參數出廠標準見表3。

表3 靜態車輪定位參數Tab.3 Static wheel alignment parameters
3 聯合仿真試驗及數據處理
3.1 前懸架仿真優化
對前懸架剛柔耦合模型進行雙輪同向激振試驗仿真運行,仿真步數為50,輪中心垂直極限行程± 50 mm。利用ADAMS/Insight 模塊對前懸架定位參數進行優化時,確定優化目標為前束角和外傾角[10],在下擺臂的硬點坐標中選取下擺臂的安裝前點和后點的y 和z 坐標值作為變量,并將上述優化目標和變量輸入ADAMS/Insight 模塊,利用其靈敏度整理出影響較大的硬點坐標,并基于考慮側滑量最小時的前束角和后傾角的值,得到下擺臂各硬點的擾動量見表4。
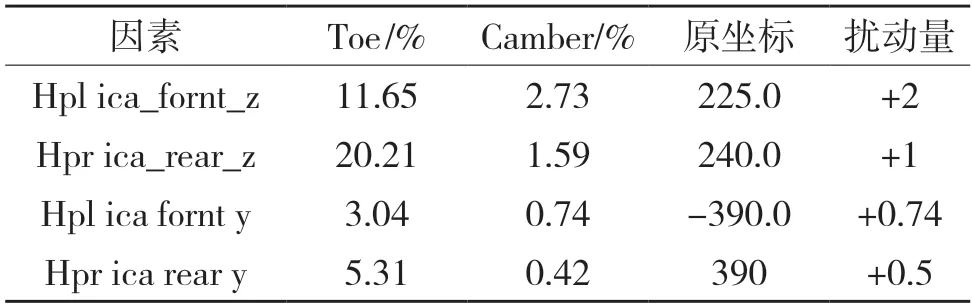
表4 影響較大因素及其擾動量Tab.4 Coordinates of major influencing factors
根據表4 調整模型結構參數,再次進行雙側車輪激振仿真,得到優化前懸架模型與原模型關于前束角和外傾角的動態變化量,如圖4 所示。

圖4 前束角和外傾角仿真曲線Fig.4 Toe-in angle and camber simulation curve
優化后前束角變化范圍為-0.162 3~0.366 1°,相對于原模型變化范圍降低了19.09% 。外傾角變化范圍為0.612 4~-0.702 2°,相對于原模型變化范圍降低了39.94%,該結果有利于提升車輛行駛平順性和直線行駛性。
3.2 整車平順性測試及分析
將整車模型和優化后整車模型以60 km/h 的速度在B 級路面進行隨機輸入試驗為例,得到駕駛員質心處3 個方向的加速度曲線和功率譜密度函數如圖5 所示,其它速度下的工況分析與此類似。由圖5(a)和圖5(b)仿真結果可知,該目標車型優化之前模型最大加速度幅值為0.23 m/s2,優化后模型仿真最大加速模型幅值為0.20 m/s2。
圖5(c)和圖5(d)是對駕駛員質心處的各軸加速度時域響應經快速傅立葉變化得到駕駛員質心各軸加速度功率譜密度曲線。2 種模型在頻率為1.734 6 Hz 均有一個峰值,該峰值為車身固有頻率,在10~15 Hz 之間駕駛員質心處頻域曲線有較小的振動波動,該波動為車輪固有頻率。并且從圖5(c)、5(d)可以看出,優化前模型振幅小于優化后模型幅值,說明優化有效。
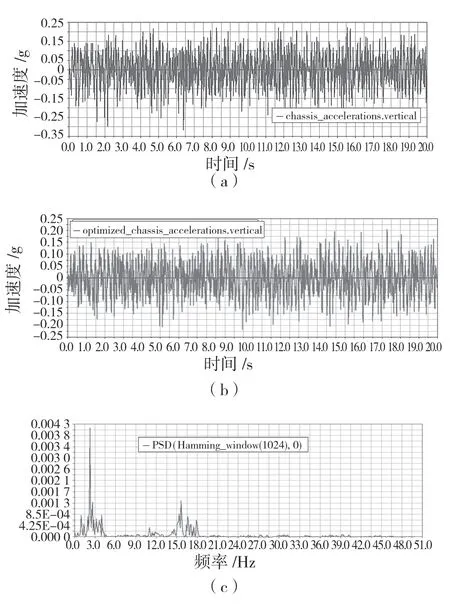
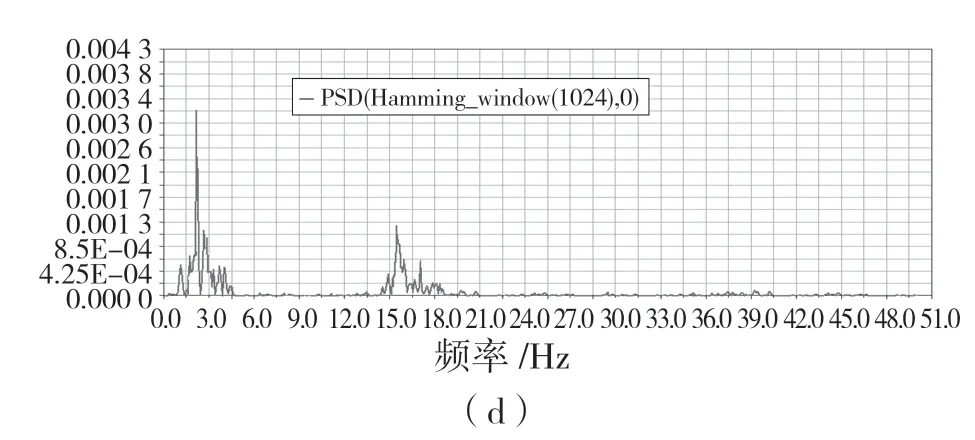
圖5 駕駛員質心橫向(x 軸)處加速度頻域信號曲線Fig.5 Frequency domain signal curve of acceleration at the lateral (x-axis) of driver's center of mass
由圖6(a)和圖6(b)橫向加速度時域仿真曲線可知,優化前模型橫向加速幅值為0.230 m/s2,優化后模型橫向加速度最大幅值為0.075 m/s2。整體來看,優化后模型駕駛員質心縱向的加速度時域和頻域峰值較優化前小,變化范圍更趨于穩定。
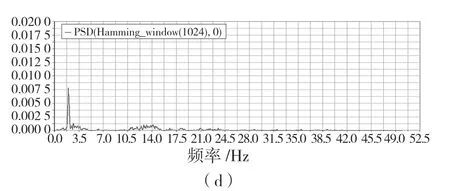
圖6 駕駛員質心橫向(y 軸)處加速度頻域信號曲線Fig.6 Frequency domain signal curve of acceleration at the lateral(y-axis)of driver's center of mass
由圖7(a)和7(b)駕駛員質心豎向加速度時域信號曲線中可以看出,優化前模型駕駛員質心垂向加速度最大值為0.68 m/s2,優化后最大值為0.53 m/s2,優化前模型加速度曲線總體波動程度和幅值的響應大于優化后模型。由圖7(c)、7(d)加速度功率譜密度曲線可以看出,兩種模型在頻率為1~2 Hz 和10~15 Hz 之間有2 個振動峰值,說明改變車輪定位參數不會改變目標車型的固有頻率。
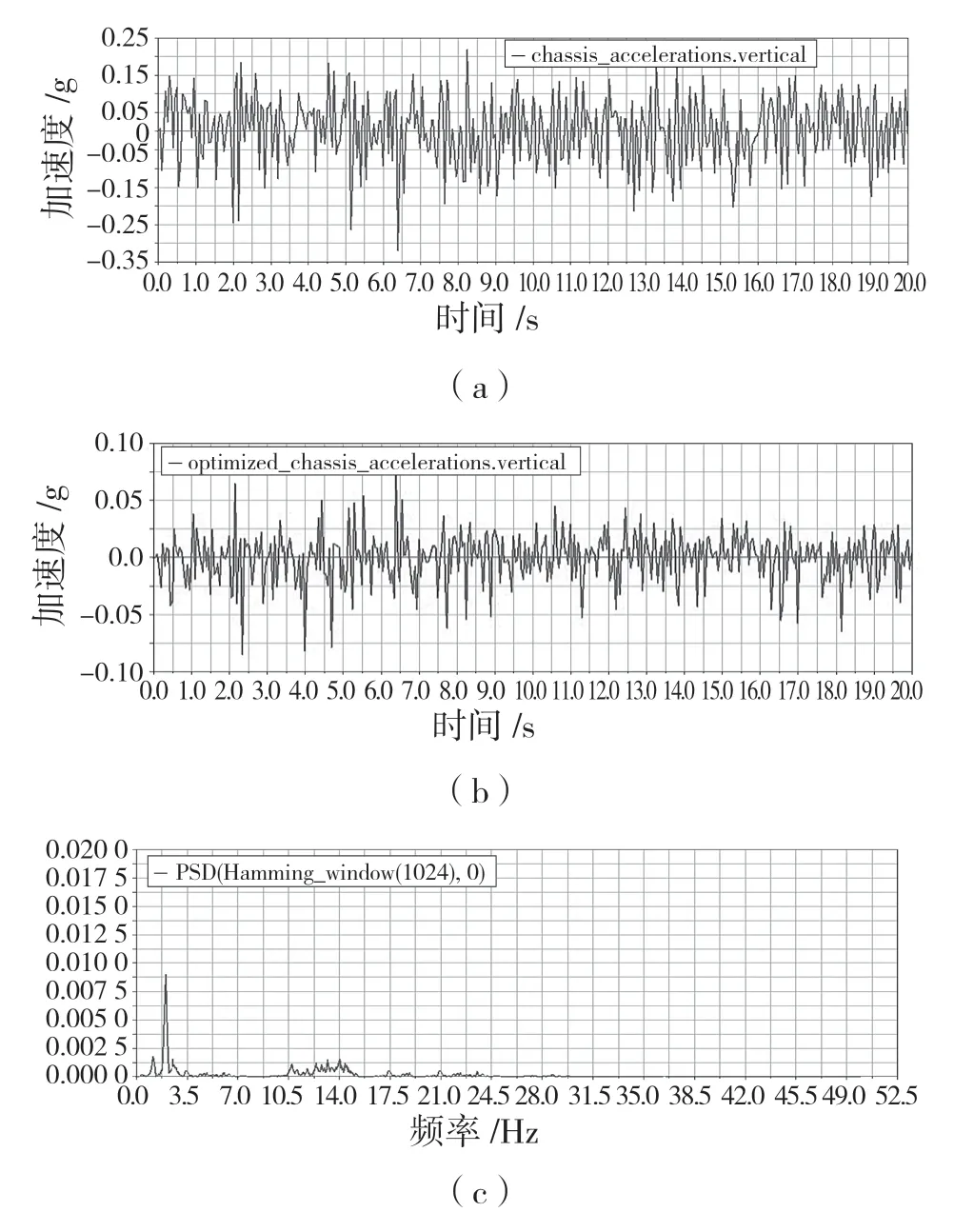
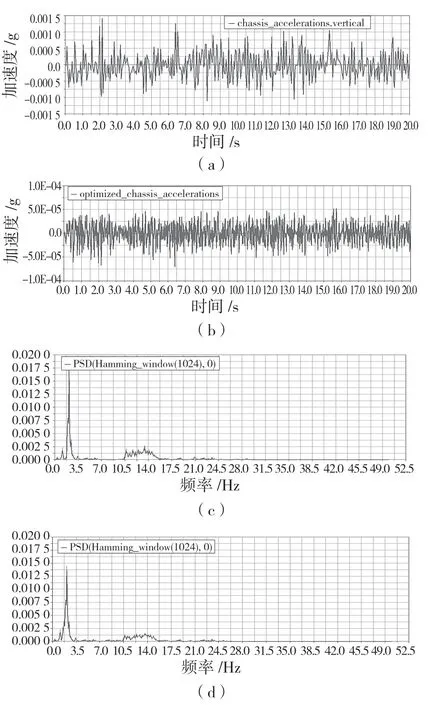
圖7 駕駛員質心豎向(z 軸)處加速度頻域信號曲線Fig.7 Frequency domain signal curve of acceleration at the lateral (z-axis) of driver's center of mass
在B 級路面條件下對整車模型進行了以車速為試驗變量的仿真試驗,車速分別為40,60,80,100 km/h,試驗統計結果數據見表5。

表5 目標車型平順性評價Tab.5 Ride comfort evaluation of target vehicle
4 結論
通過對比實驗數據,可以得到以下結論:
(1)目標車型優化前后模型在相同的工況下,加速度響應曲線和功率譜密度函數在隨機路面激勵試驗變化趨勢一致,優化前模型的垂向加速度略大于優化后模型垂向加速度,主要原因是優化后合理的定位參數使得輪胎產生與路面沖擊相反的力矩,有效抵消來自車輪的外力矩,使得傳至車身的振動減小,各軸向加速度都有大的降低,為改進目標車型平順性提供了參考。
(2)優化前后目標車型各軸向加速度功率譜密度曲線主頻值一致,優化后模型功率譜密度曲線對應峰值略小于優化前對應的峰值,并且優化后模型駕駛員質心總加權加速度較原模型降低3%,加速度變化范圍更小,乘坐舒適性更好。
(3)目標車型是作為一款乘用轎車,主要行駛在 B 級路面上,車輛在低速行駛時舒適性較好,對比結果顯示懸架優化設計有效提高了目標車型的平順性和乘坐舒適性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
房地產導刊(2022年5期)2022-06-01 06:20:14
汽車實用技術(2022年4期)2022-03-07 06:07:20
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
