BDS-3載波相位平滑偽距單點定位性能分析
2022-10-31 12:01:50岑銘
地理空間信息 2022年10期
關鍵詞:方向
岑 銘
(1.廣西壯族自治區水利電力勘測設計研究院有限責任公司,廣西 南寧 530023)
對于剛剛建設完成的北斗衛星導航系統(BDS),其定位精度、衛星空間構型、定軌授時等性能受到國內外廣大學者的關注,也將是研究的熱點[1]。北斗三號(BDS-3)最后一顆組網衛星于2020-06-23成功發射,于2020-07-31正式開通全球服務,在軌衛星共計30顆,能播發B1I、B1C、B2a、B2b、B3I等多個頻率,極大豐富了多頻組合定位的多樣性。偽距單點定位是采用偽距觀測值實現普通定位的技術,受碼偽距噪聲和多路徑的影響,一般定位精度較低,適用于車輛、船舶、飛機等定位精度需求不高的導航應用中[2-4]。相比偽距觀測值,相位觀測值觀測噪聲和多路徑誤差更小,而載波相位平滑偽距算法可以有效抑制多路徑效應對偽距的影響,且不存在模糊度固定問題,能有效提升偽距單點定位精度[5-12]。鑒于當前對BDS-3相位平滑偽距單點定位性能研究較少,本文基于多個MGEX跟蹤站多天數據,采用CNMC相位平滑偽距算法進行偽距單點定位,并對BDS-3單頻與雙頻定位結果進行了分析。
1 數學模型
1.1 偽距單點定位模型
BDS-3單頻偽距單點定位模型[13-14]為:

式中,i為頻率;Pi代表偽距觀測值;ρ為測站與衛星之間的幾何距離;dtr為接收機鐘差;dts為衛星鐘差;Ii為電離層延遲;Ti為對流層延遲;εi為偽距觀測噪聲。
雙頻組合無電離層偽距單點定位模型是最常用的數學模型,以B1I和B3I兩個頻率為例[12]。
式中,IF為雙頻無電離層算子;f為頻率。
1.2 CNMC相位平滑偽距數學模型
CNMC算法是一種相位平滑偽距算法,能實時削弱偽距多路徑誤差,提升偽距單點定位精度[15]。以B1I和B3I兩個頻率為例,單頻CNMC相位平滑偽距數學模型為[12]:


2 實驗與定位結果分析
2.1 數據選取與數據處理方案
為使實驗結果具有代表性,本文選取了7個MGEX跟蹤站數據,分別為GODN、JFNG、KRGG、POTS、SGOC、SUTM和YAR2站,時間為2020年第310~314天,數據采樣頻率為30 s,其中YAR2站接收不到BDS-3衛星B2b信號,因此不對YAR2站BDS-3衛星B2b頻率定位性能進行分析。
在進行數據解算時,采用自編軟件,衛星截止高度角設置為10°。采用高度角定權,利用Saastaminen模型修改對流層模型,單頻偽距單點定位電離層延遲改正采用Klobuchar模型,雙頻組合偽距單點定位采用無電離層組合模型,參考坐標通過IGS中心的SNX文件獲取。單頻解算頻率選擇B1C、B1I、B2a、B2b以及B3I頻率,雙頻解算頻率選擇B1C/B2a以及B1I/B3I組合,分別進行CNMC相位平滑偽距單點定位解算和非CNMC相位平滑偽距單點定位解算。
2.2 單頻偽距單點定位結果分析
根據解算方案以及參考坐標,將解算得到的三維坐標結果轉換到E、N、U 3個方向,計算得到3個方向的定位誤差,并且根據定位誤差進一步統計各測站多天RMS平均值作為評估標準。圖1給出了各頻率單頻偽距單點定位誤差時間序列,以POTS站第310 d數據解算結果為例。
如圖1所示,B2b頻率3個方向定位誤差要大于B1C、B1I、B2a、B3I 4個頻率,而B1C、B1I、B2a、B3I 4個頻率對應方向定位誤差相當。所選5個頻率任一頻率在平滑前偽距觀測噪聲都較大,導致定位誤差較大,而加入CNMC相位平滑算法后,各頻率定位結果穩定性均有提升,定位誤差明顯減小,減小量在1 m左右。
圖2給出了7個跟蹤站連續5 d各頻率E方向、N方向、U方向RMS值的平均值。
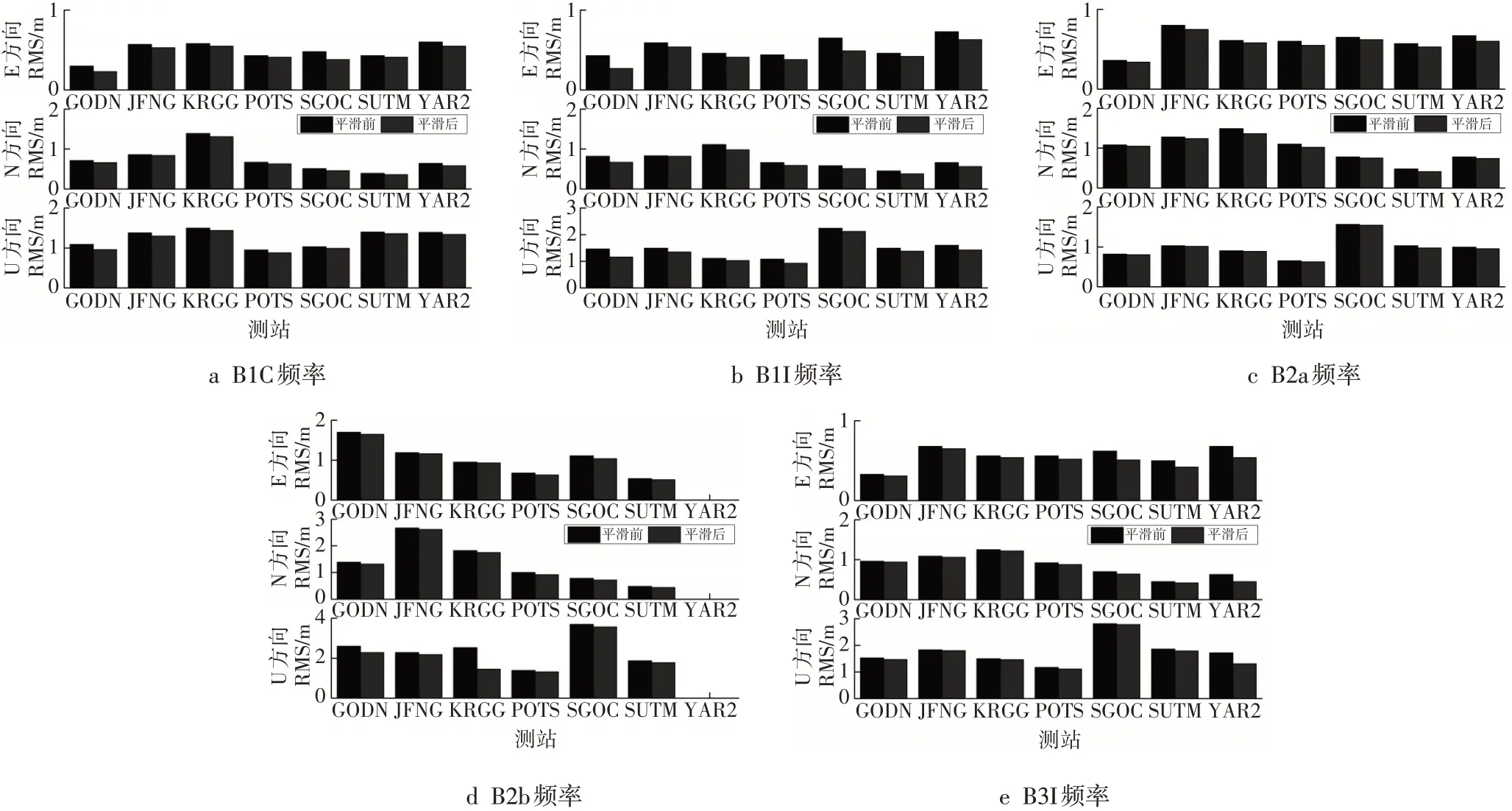
圖2 各測站多天不同頻率單頻偽距單點定位RMS值平均值
如圖2所示,在平滑前除個別跟蹤站外,B1C、B1I和B3I單頻偽距單點定位E方向和N方向定位精度優于1 m;U方向定位精度優于2 m;B2a頻率E方向定位精度優于1 m;N方向定位精度優于2 m;U方向定位精度優于3 m;B2b頻率E方向和N方向定位精度優于2 m;U方向定位精度優于3 m。加入CNMC相位平滑算法后,各頻率定位精度有所提升,但提升量并不明顯,在0~0.1 m之間。
進一步分析加入NMC相位平滑算法后各頻率單頻偽距單點定位精度的定量提升,表1給出了多個跟蹤站多天定位精度的平均值以及定量提升值。
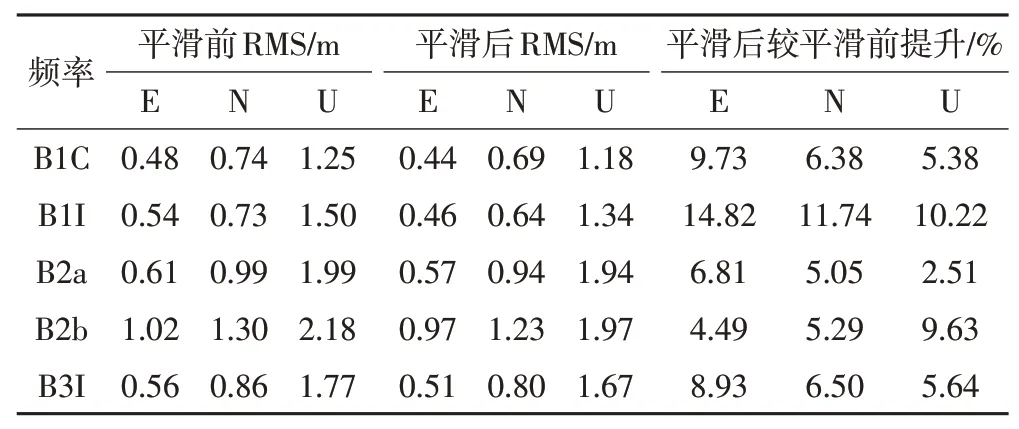
表1 單頻偽距單點定位平均定位精度以及提升量統計
如表1所示,未加入NMC相位平滑算法前,B1C、B1I、B2a、B3I 4個頻率偽距單點定位E方向和N方向定位精度優于1 m;U方向定位精度優于2 m;B2b頻率偽距單點定位E方向和N方向定位精度優于1.5 m;U方向定位精度優于2.5 m;加入NMC相位平滑算法后,各頻率定位精度都有所提升,B1C、B2a、B2b、B3I 4個頻率3個方向定位精度提升量在2%~10%之間,B1I頻率3個方向定位精度提升量在10%~15%之間。
2.3 雙頻偽距單點定位結果分析
圖3給出了2種雙頻偽距單點定位誤差時間序列,以POTS站第310 d數據解算結果為例。
如圖3所示,未加入NMC相位平滑算法前,雙頻組合有效削弱了電離層延遲對定位精度的影響,但將觀測噪聲放大,導致定位誤差要大于單頻偽距單點定位誤差,B1C/B2a組合偽距單點定位誤差小于B1I/B3I組合。加入NMC相位平滑算法后,2種雙頻組合偽距單點定位結果更加穩定,定位誤差明顯減小,B1C/B2a組合偽距單點定位誤差E方向和N方向減小量在1 m左右;U方向減小量在2 m左右;B1I/B3I組合偽距單點定位誤差E方向和N方向減小量在2 m左右;U方向減小量在4 m左右。
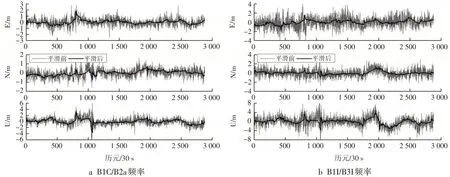
圖3 POTS測站第310天不同雙頻組合偽距單點定位誤差序列
圖4給出了7個跟蹤站連續5 d兩種雙頻組合E方向、N方向、U方向RMS值的平均值。
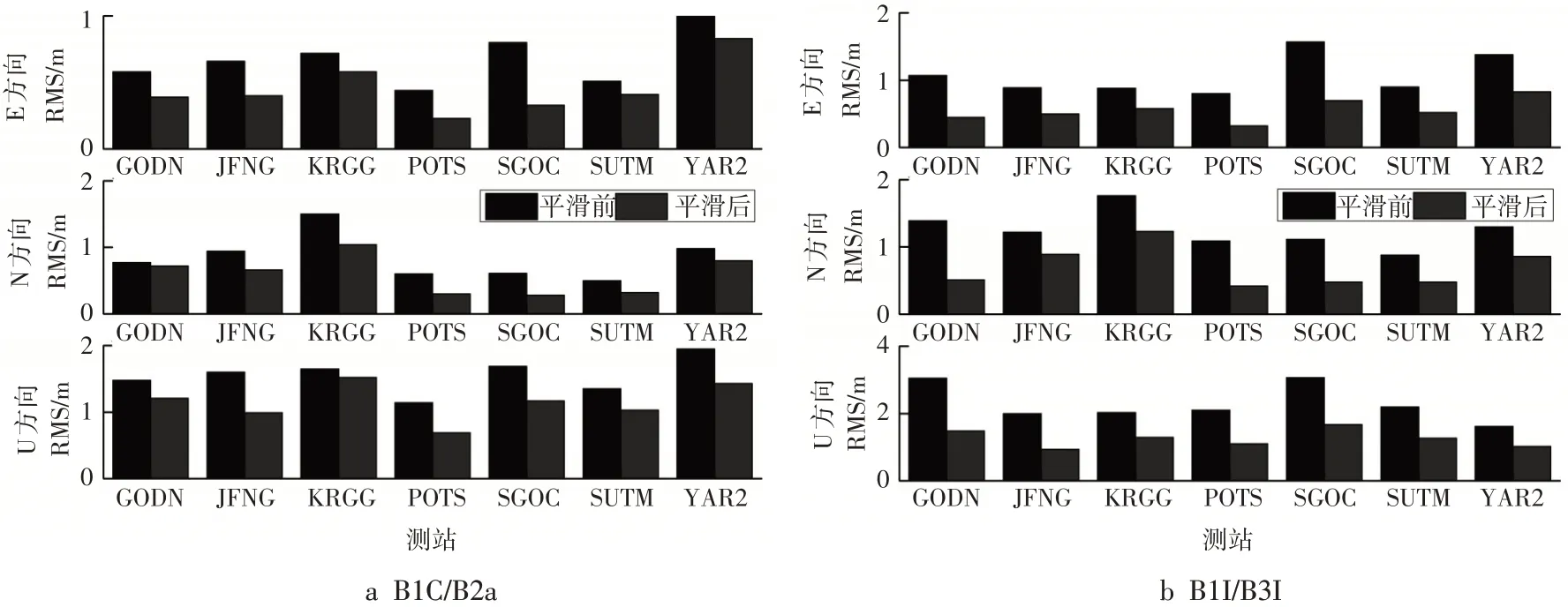
圖4 各測站多天不同雙頻組合偽距單點定位RMS值平均值
如圖4所示,未加入NMC相位平滑算法前,除個別測站外,B1C/B2a組合偽距單點定位E方向和N方向定位精度優于1 m;U方向定位精度優于2 m;B1I/B3I組合偽距單點定位E方向和N方向定位精度優于2 m;U方向定位精度優于3 m。加入NMC相位平滑算法后,各測站定位精度均有較明顯提升,定位精度提升值在0.1~2 m之間。
進一步分析加入NMC相位平滑算法后兩種雙頻組合偽距單點定位精度的定量提升,表2給出了多個跟蹤站多天定位精度的平均值以及定量提升值。
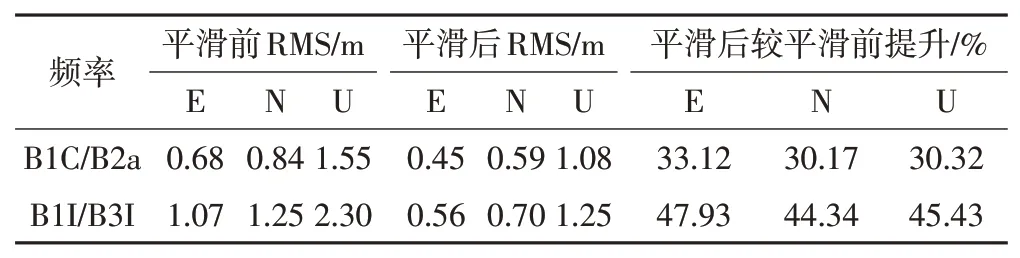
表2 雙頻偽距單點定位平均定位精度以及提升量統計
如表2所示,未加入NMC相位平滑算法前,B1C/B2a組合偽距單點定位E方向和N方向定位精度優于1 m;U方向定位精度優于2 m;B1I/B3I組合偽距單點定位E方向和N方向定位精度優于1.5 m;U方向定位精度優于2.5 m。加入NMC相位平滑算法后,2種雙頻偽距單點定位精度有較明顯提升,B1C/B2a組合偽距單點定位3個方向定位精度提升量在30%~35%之間,B1I/B3I組合偽距單點定位3個方向定位精度提升量在40%~50%之間。
3 結語
為詳細分析CNMC相位平滑算法對BDS-3偽距單點定位性能的提升,在全球范圍內均勻選取7個可以接收到BDS-3多頻信號的MGEX跟蹤站,分別進行了偽距單點定位與CNMC相位平滑偽距單點定位實驗,并分析了5種單頻與2種雙頻組合偽距單點定位結果。
1)CNMC相位平滑算法能提升BDS-3偽距單點定位結果的穩定性,使各頻率偽距單點定位誤差有明顯的減小。
2)對于單頻偽距單點定位,CNMC相位平滑算法對B1C/B2a組合偽距單點定位精度的提升量優于另外4種頻率單頻偽距單點定位精度,對B1I定位精度的提升量在10%~15%之間,對外4種頻率單頻偽距單點定位精度的提升量在2%~10%之間。
3)對于雙頻組合偽距單點定位,CNMC相位平滑算法對B1I頻率偽距單點定位精度的提升量優于B1I/B3I組合偽距單點定位精度,對B1C/B2a組合定位精度的提升量在30%~35%之間,對B1I/B3I組合偽距單點定位精度的提升量在40%~50%之間。
4)CNMC相位平滑算法對偽距單點定位精度的提升量與觀測噪聲有關,對雙頻組合偽距單點定位精度的提升量明顯優于單頻偽距單點定位精度。
隨著對BDS-3定位性能的深入研究,相位平滑算法對定位精度的影響將會受到更多的關注,下一步繼續研究。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50