基于SHAP-RF 框架的越野車輛路面識別算法研究1)
2022-11-06 13:35:04劉彥辰李雅欣孔德成姜泓屹
力學學報 2022年10期
趙 健 劉彥辰 朱 冰 李 揚 李雅欣 孔德成 姜泓屹
(吉林大學汽車仿真與控制國家重點實驗室,長春 130022)
引言
盡管隨著經濟科技水平的發展,城市和鄉村的路面鋪裝率都得到了提升[1],但非結構化道路依然大量存在,一些特殊任務例如野外救援、軍事運輸等都需要車輛在非結構化道路上有良好的行駛性能[2].在結構化道路上,路面平整、附著良好,路面環境相對單一而穩定,車輛能夠順利行駛;而在越野環境中,路面情況復雜多變,不同類別路面的軟硬程度、附著條件、材質都具有明顯的不同,如果車輛能夠感知到當前所處路面的狀態,就能對底盤各控制子系統參數進行適當的調整,以獲得更好的通過性、平順性與操縱穩定性等[3-8].
路面類型識別方法大體可以分為基于視覺的識別[9-11]與基于車輛動力學特征[12-13]的識別兩大類,此外還有基于圖像和車輛動力學信息的多傳感器融合識別方法[14-17].對基于車輛動力學特征的識別方法而言,路面識別結果不會受到光照等外界復雜環境因素影響,同時由于分類模型本身就隱含了車輛與路面的相互作用機理,其識別結果對車輛控制也更具有應用價值;而多傳感器融合的方法雖然能夠在考慮前方路面的紋理和顏色信息的同時,兼顧車輪與地面間的相互作用機理,但受限于多傳感器融合方法的“木桶效應”,車輛動力學方法的識別精度仍然對融合精度有較大影響.
但是越野路面特征復雜多變,而車輛與不同類型的路面的作用機理難以準確描述,因此近年來學者們開始采用數據驅動的方法,利用機器學習算法對非線性問題進行擬合.Brooks 等[18]采集了車輪的振動信號,然后從頻域的角度對信號分析并提取出了車輪振動的功率譜密度特征,利用線性判別分析法實現了土路與沙地等路面的識別.Sadhukhan等[19]搭建了包括慣性導航系統、聲吶系統與輪速編碼器的車輛行駛數據采集平臺,以車輛駛過由4 種路面組成的混合路面時的垂向加速度信號作為基礎,提取信號的頻域特征,并將這些特征輸入到神經網絡中,實現了路面的識別.楊帆等[20-21]采集了試驗車在不同路面下行駛時車輪垂向力的信號,并對信號進行特征提取,利用支持向量機實現路面的分類.薛開等[22]在車輪架上安裝了傳聲器和加速度計,采集車輛在各種路面上的振動信號,基于k-近鄰法實現了路面的分類.武維祥[23]通過從車輛CAN 總線得到的信號估計車輛的輪速波動量與滾動阻力,然后以輪速波動量與滾動阻力作為輸入,分別采用模糊規則與隨機森林完成了軟路面的識別.
雖然上述基于機器學習的路面分類模型表現優秀,但其結構復雜的特點使得人們難以清晰理解模型做出決策的過程,人們一般把這些模型當作“黑盒”來處理[24],也就難以理解模型輸入對輸出的作用機制,若能對黑盒的路面分類模型加以解釋,并針對模型解釋結果對分類模型加以改進,可以使模型更加易于理解,提升模型的可靠性,實現路面類型的準確識別.在機器學習中,可解釋性定義為對模型內部機制的理解以及對模型輸出結果的理解[25].Zeiler等[26]提出了一種新穎的CNN 隱層可視化技術,從信息提供性方面入手,通過特征可視化查看精度變化,將隱層轉化成人類可以理解的有實際含義的圖像,從而了解CNN 學習到怎樣的特征.Hinton 等[27]提出了一種知識蒸餾方法,通過訓練單一的相對較小的網絡來模擬原始復雜網絡或集成網絡模型的預測概率來提煉復雜網絡的知識,并且證明單一網絡能達到與復雜網絡幾乎同樣的性能.Lundberg 等[28]將博弈論與模型解釋聯系起來,提出了SHAP(Shapley additive explanation)解釋法,該方法是構建一個線性可加模型并將特征歸因化,通過SHAP值來反應出一個特征對模型輸出的影響的大小.Khaleel 等[29]提出一種文本解釋性的偽真值生成方法,并以之為基準對6 種模型解釋方法進行評價,最終表明(layer-wise relevance propagation,LRP)對深度文本分類器的解釋性能更佳.全文君[24]提出了一種基于標準化數據挖掘過程(CRISP-DM)的可解釋性研究框架與一種原始數據理解流程,并結合認知理論,提出了一種基于人分類學習的黑盒模型解釋法(HCLI).楊曄民等[30]設計了可視分析系統FORESTVis,這套分析系統包括多個可視化組件,利用該系統可以直觀地了解隨機森林的結構特點和工作流程與機理,并對人們評估模型的性能提供了便利.
針對目前基于車輛動力學特征的路面識別方法存在的輸入特征過多、可解釋性不足的問題,本文從模型解釋的角度提出SHAP-RF 路面識別算法設計框架.采集車輛在壓實土路、沙地、良好瀝青路與冰雪路上的行駛數據,并設計3 個次級行駛特征特征的計算方法,進而進行信號的時域和頻域統計特征計算;基于全部特征建立高維隨機森林路面識別模型,采用SHAP-RF 路面識別算法設計框架,解釋分析高維模型中輸入特征對分類結果的影響并進行有效的特征篩選,據此重新構建基于隨機森林的降維路面分類模型,以期在使用較少分類特征的情況下保證車輛行駛路面類別的有效識別.
1 數據采集和特征計算
1.1 車輛行駛數據采集
采用圖1 所示的數據采集系統,試驗車上安裝了RT3000 慣導系統、羅技Pro-C920 高清攝像頭、CAN 總線收發分析工具VN1630 A 和上位機.其中,試驗車為某款全尺寸SUV,搭載豐富的傳感器與電控系統,通過CAN 總線與VN1630 A 進行信號傳輸;RT3000 慣導系統用于車輛運動數據的采集與對照;攝像頭對車輛行駛過程進行記錄,為后續的數據標記與處理提供便利.
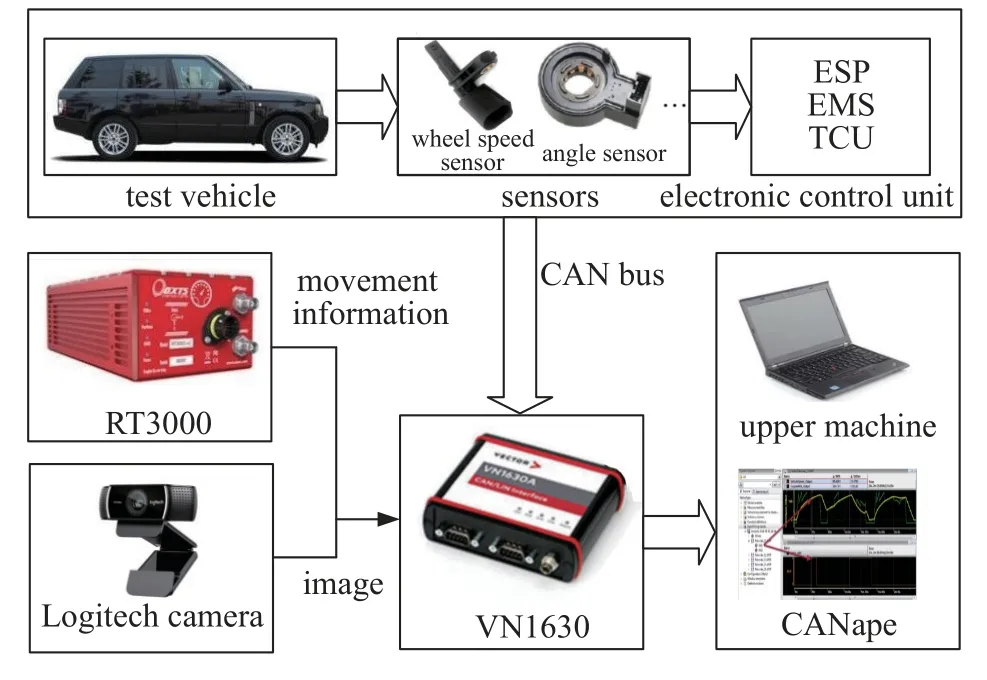
圖1 數據采集系統示意圖Fig.1 Data acquisition system
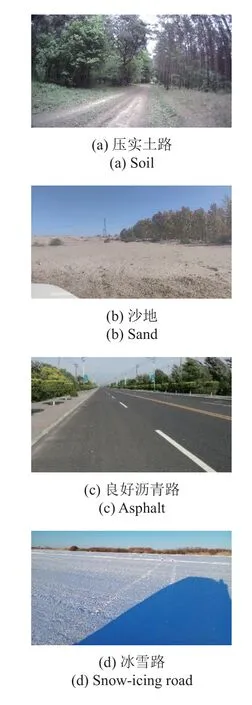
圖2 4 種典型路面Fig.2 Four typical road surfaces
數據采集系統采集的主要信號如表1 所示.本文所設計的算法需要識別壓實土路、沙地、良好瀝青路與冰雪路4 種典型路面,如圖2 所示,在保證通過性的情況下,對4 種路面分別選取試驗工況進行數據采集,為避免偶然因素造成數據集的污染,每種工況下都盡可能進行多次試驗以保證獲取足夠的有效數據.
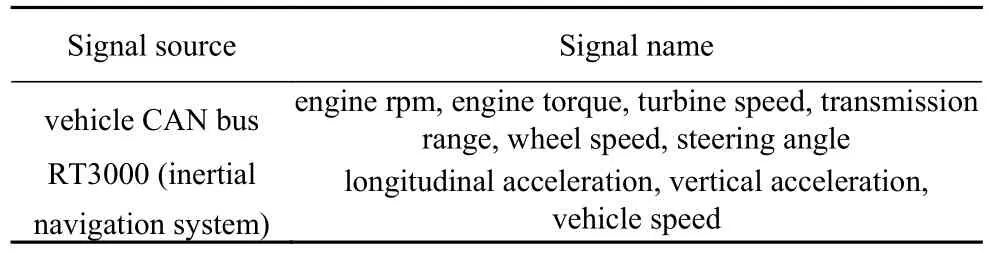
表1 采集的主要信號Table 1 Part of the collected signal
1.2 次級行駛特征計算
數據采集系統直接采集的每一種原始數據所體現的車輛在不同路面上行駛特征的直觀性不強,且各個原始數據之間也存在一定程度的耦合,因而有必要進行次級行駛特征的計算.本文考慮到算法識別的路面類別中存在軟硬程度和路面輪廓的差異,對車輛行駛阻力和車身振動會產生不同程度的影響,因此設計了車輛滾動阻力Ff、輪速波動量Δ和垂向加速度系數acoe3 個次級行駛特征的計算方法.
1.2.1 車輛滾動阻力Ff
汽車在不同路面行駛時受到的道路阻力有明顯差別,在沙地等松軟土壤上行駛時的道路阻力遠大于硬路面,這一阻力可以作為路面識別的重要依據.
在車輛直線行駛時,受到的阻力由加速阻力、坡度阻力、空氣阻力和滾動阻力4 部分構成[31],車輛的縱向受力如圖3 所示.
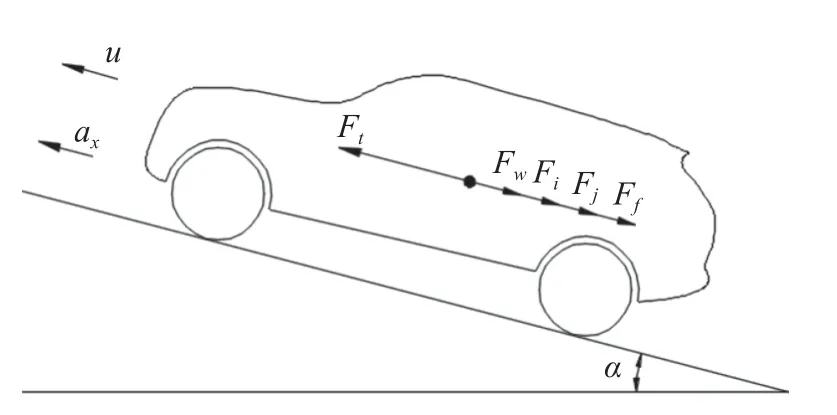
圖3 車輛縱向受力示意圖Fig.3 Diagram of longitudinal force on vehicle
根據車輛的受力情況,可以得到驅動力-行駛阻力平衡方程

式中,Ft為發動機輸出的扭矩傳遞到車輪后所產生的驅動力,Ff為車輪在路面滾動時產生的阻力,Fw為空氣作用于車身上產生的空氣阻力,Fj為在加速時克服慣性產生的加速阻力.
根據式(1),可計算車輛的滾動阻力為

式中,Teng為發動機輸出的扭矩,可以通過發動機的EMS 系統獲取,k為液力變矩器的變矩系數,i0為主減速器的傳動比,ig為變速器的傳動比,it為分動器的傳動比,ηT為整個傳動系統的傳動效率,其大小會隨著液力變矩器的速比發生變化,r為車輪的滾動半徑;CD為汽車的風阻系數,A為汽車在正面的投影面積的大小,u為車輛的行駛速度;M為整車的質量,α為道路的坡度角;δ為旋轉質量換算系數.
由于車輛的平動加速阻力和坡度阻力理論上并不相關,而車輛搭載的加速度傳感器測量車輛行駛方向的加速度時會將兩者耦合,即

因此為了計算方便,將滾動阻力的計算公式轉換為以下形式

式中,ax_car為車輛搭載的加速度傳感器測量的車輛行駛方向的加速度.
此外,為了消除滾動阻力的抖動,真實地反映道路的滾動阻力,對滾動阻力Ff進行濾波處理,得到濾波后的滾動阻力Ff_flt,計算良好瀝青路面上的如圖4 所示.
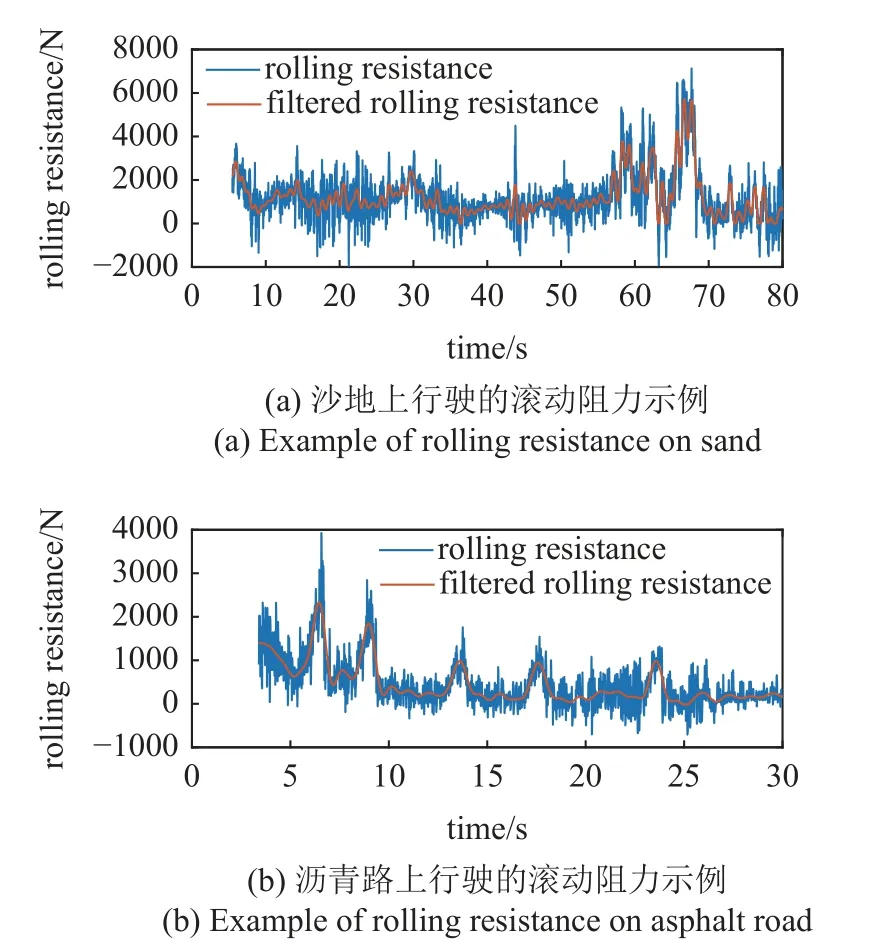
圖4 滾動阻力計算結果示例Fig.4 Example of rolling resistance
1.2.2 輪速波動量Δ
當車輛行駛在各種不平整的地面上時,輪速會產生較大波動,而當車輛在沙地或附著系數比較小的路面上行駛時,由于土壤的表層破壞或者車輪到達附著極限,車輪也會抖動甚至是打滑,如圖5 所示.因此將四個車輪的輪速波動量作為識別的依據.
在計算輪速波動量時,還需要考慮車輛轉向造成的左右側車輪輪速差異,如圖5 中局部放大部分所示,為消除這種輪速差異,采用圖6 所示的阿克曼轉向幾何模型對輪速進行修正.
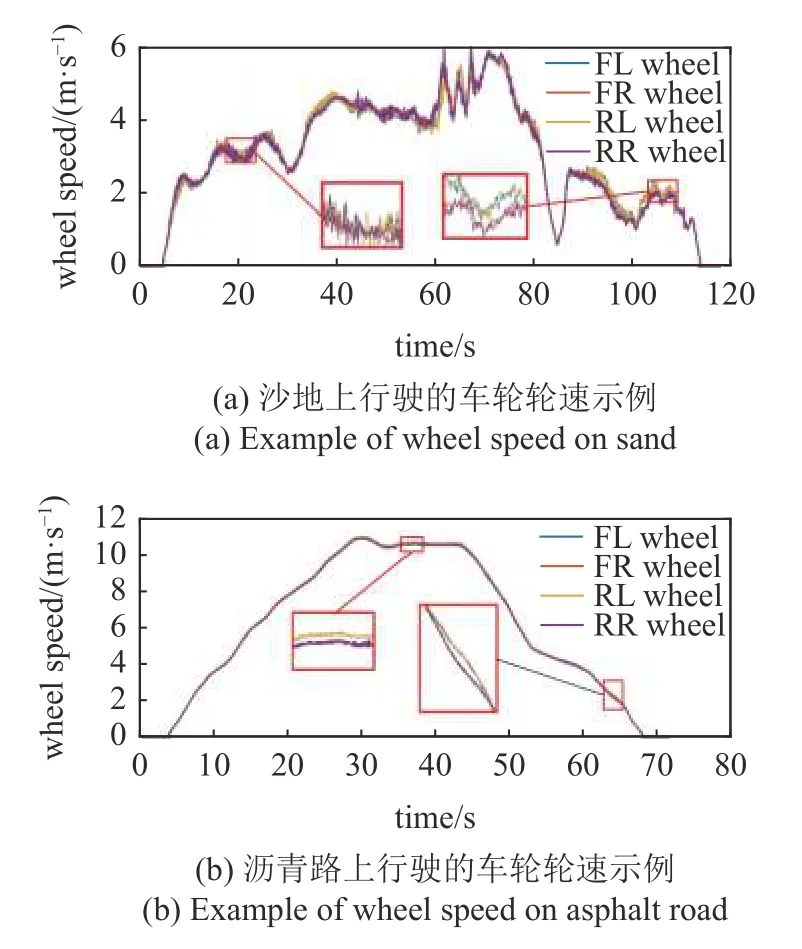
圖5 不同路面上的車輪輪速示例Fig.5 Example of wheel speed on different road
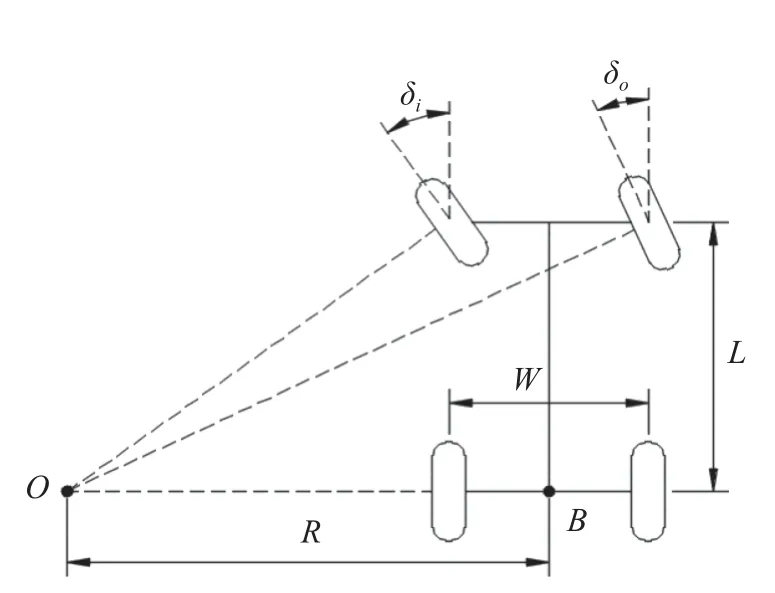
圖6 阿克曼轉向幾何模型Fig.6 Ackermann steering geometry
將每個車輪的輪速轉換成車輛后軸中心B點處的速度
式中vBfl,vBfr,vBrl,vBrr分別為汽車的左前輪、右前輪、左后輪、右后輪輪速等效至車輛后軸中心處的值,vfl,vfr,vrl,vrr分別為汽車的左前輪、右前輪、左后輪、右后輪的輪速,R為汽車后軸中心B點處對應的轉彎半徑,W為輪距,L為軸距,δ為車輪的轉向角,忽略內外側車輪轉向角差異.
定義輪速波動量計算式為
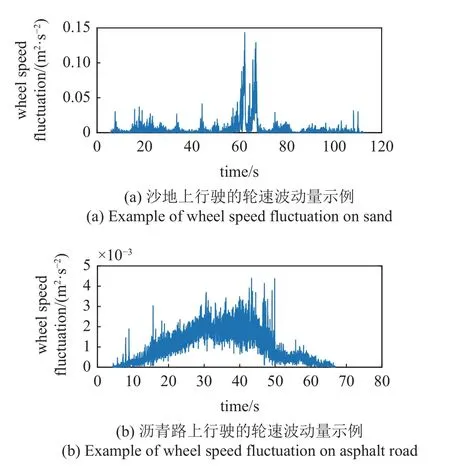
圖7 不同路面上的輪速波動量示例Fig.7 Example of wheel speed fluctuation on different road surfaces
1.2.3 垂向加速度系數acoe
路面在垂直方向上的高度變化是路面振動激勵的主要成分,路面輪廓輸入可以用傅里葉級數表示為無數個正弦波的疊加形式[32],即
式中,Zr是地面輪廓的高度,fi是空間頻率,Ai和φi是空間頻率為fi的正弦波分量的幅值和相位偏移,v是行駛速度,t為時間.
將式(7)對時間t進行兩次微分后可以得到

由式(8)可知,路面激勵下車輛垂向加速度響應受到車輛行駛速度的影響,本文定義一個新的特征垂向加速度系數acoe來消除車速對車輛垂向加速度的影響,acoe定義式為

式中,az為車身的垂向加速度,n為一個常數,在同一種路面下n的取值應當使acoe的波動程度與車速的相關程度最小,n的取值通過試驗數據計算獲得.良好瀝青路面上車輛行駛數據共46 段,每段數據長度不小于30 s,包括車速范圍2~ 100 km/h,采用如下步驟獲取n的值:
(1)將各數據段中的垂向加速度數據不重疊地劃分成每128 幀一組;
(2)對n的不同取值,計算每組數據中垂向加速度系數標準差σacoe與車速的均值vmean;
(3)計算n的不同取值下,σacoe與vmean的相關系數,相關系數最接近0 時,acoe的波動程度與車速的相關性最小,此時n的值作為最終取值.
σacoe與vmean的相關系數隨n值變化曲線如圖8所示,最終取n=0.4,并計算垂向加速度系數示例如圖9 所示,可以看出與垂向加速度相比,其波動程度與車速的相關性明顯減小.
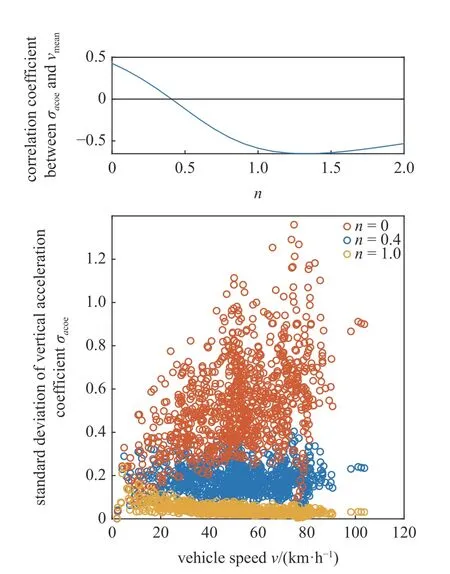
圖8 相關系數隨n值變化情況Fig.8 Correlation coefficients with different nvalues
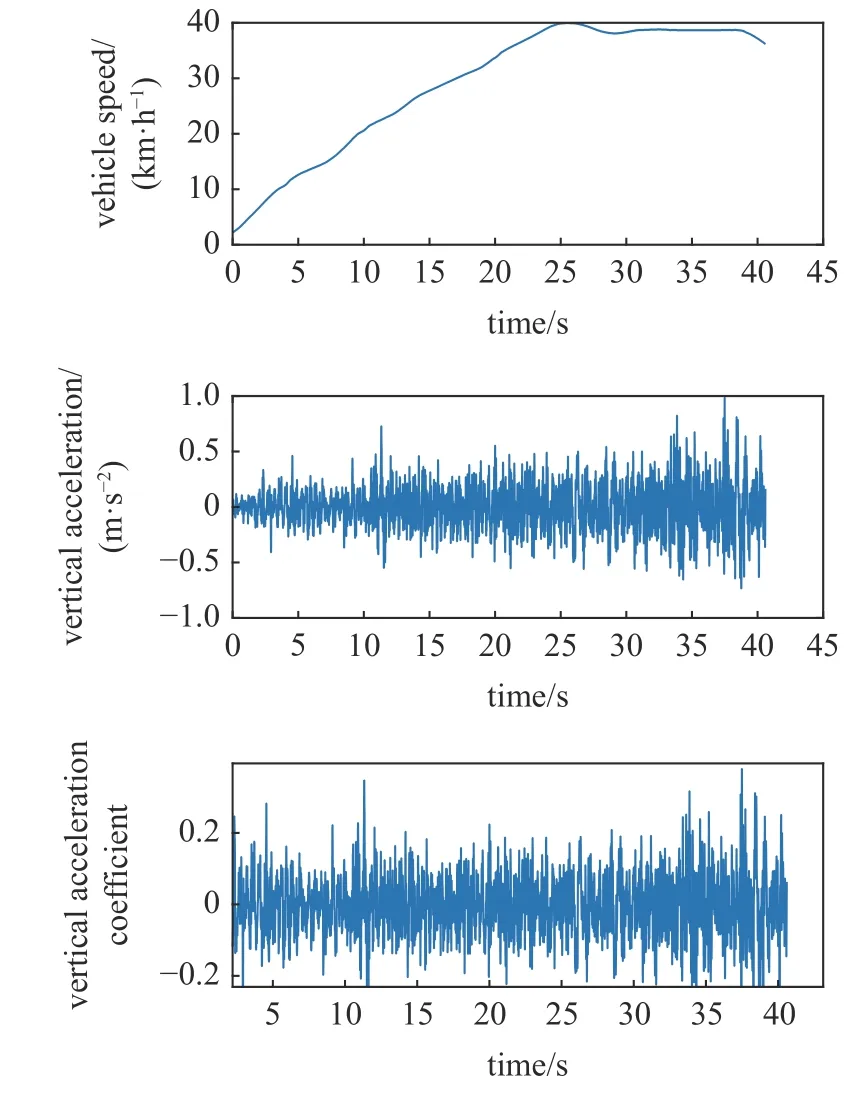
圖9 垂向加速度系數計算示例Fig.9 Example of vertical acceleration coefficient
2 SHAP-RF 路面識別算法設計框架
2.1 架構設計
基于機器學習算法設計路面分類器,特征選擇的合理性對算法的分類效果有決定性的影響.通常情況下,基于數據的時域和頻域統計計算可以獲得大量特征.然而使用大量特征會增加機器學習算法的復雜度,容易導致過擬合現象,分類模型的泛化能力變差,因此需要對數據特征進行降維.本文所設計的SHAP-RF 路面識別算法框架,采用RF 方法設計路面分類器,并用SHAP 模型解釋方法實現降維操作.相比常用的數據降維方法,例如主成分分析(principal component analysis,PCA) 和因子分析(factor analysis,FA),采用的SHAP 模型解釋方法不對特征進行變換,同時能夠獲得特征的重要性和對路面類別輸出的影響情況,從而為高維RF 模型的降維提供指導.
本文所設計的SHAP-RF 路面識別算法框架如圖10 所示.首先進行數據的時域和頻域統計特征計算,獲得大量待篩選特征;隨后采用隨機森林算法設計了一個采用全部待篩選特征的高維路面識別模型,基于SHAP 解釋法對高維模型進行解釋,分析各特征對準確識別結果的貢獻度和依賴度;以此為基礎縮減高維模型的輸入特征維度,完成降維隨機森林路面識別模型的設計.
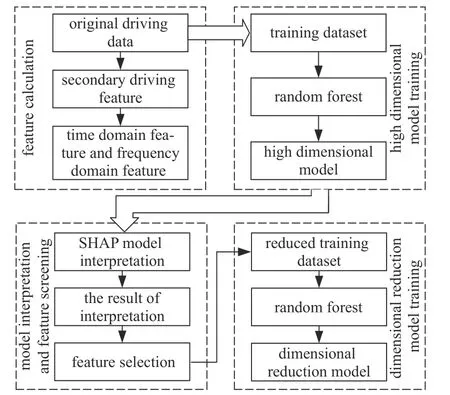
圖10 SHAP-RF 路面識別算法設計框架Fig.10 SHAP-RF road identification algorithm design framework
2.2 時域特征和頻域特征計算
除了行駛特征本身的數值以外,行駛特征在一段時間內的波動情況也與路面類型有關,因此對行駛特征數據進行時域特征與頻域特征的提取,包括四輪輪速vfl,vfr,vrl,vrr,車身垂向加速度az和3 個次級行駛特征Ff,Δ和acoe.其中,4 個車輪的輪速在時間上的變化受到車輛加速與減速動作的影響,因此只對4 個車輪輪速的頻域特征進行提取,不提取時域特征.具體步驟如下.
(1)行駛條件判斷: 由于車輛速度較小的時候,受信號采集精度限制,行駛特征參數變化異常,因此進行特征計算時,只對車速大于2 km/h 的數據進行計算.
(2)采用線性插值的方法,將傳感器數據的采樣頻率進行同步.
(3)提取包括當前時刻在內的長度為128 的時間序列信號.
(4)提取時間序列信號的時域特征和頻域特征.
最后,獲得由行駛特征原始值(包括車身垂向加速度az和3 個次級行駛特征Ff,Δ和acoe)、行駛特征濾波值(濾波后的滾動阻力Ff_flt)以及行駛特征時域特征和頻域特征組成的共105 個路面識別特征,如表2 所示.
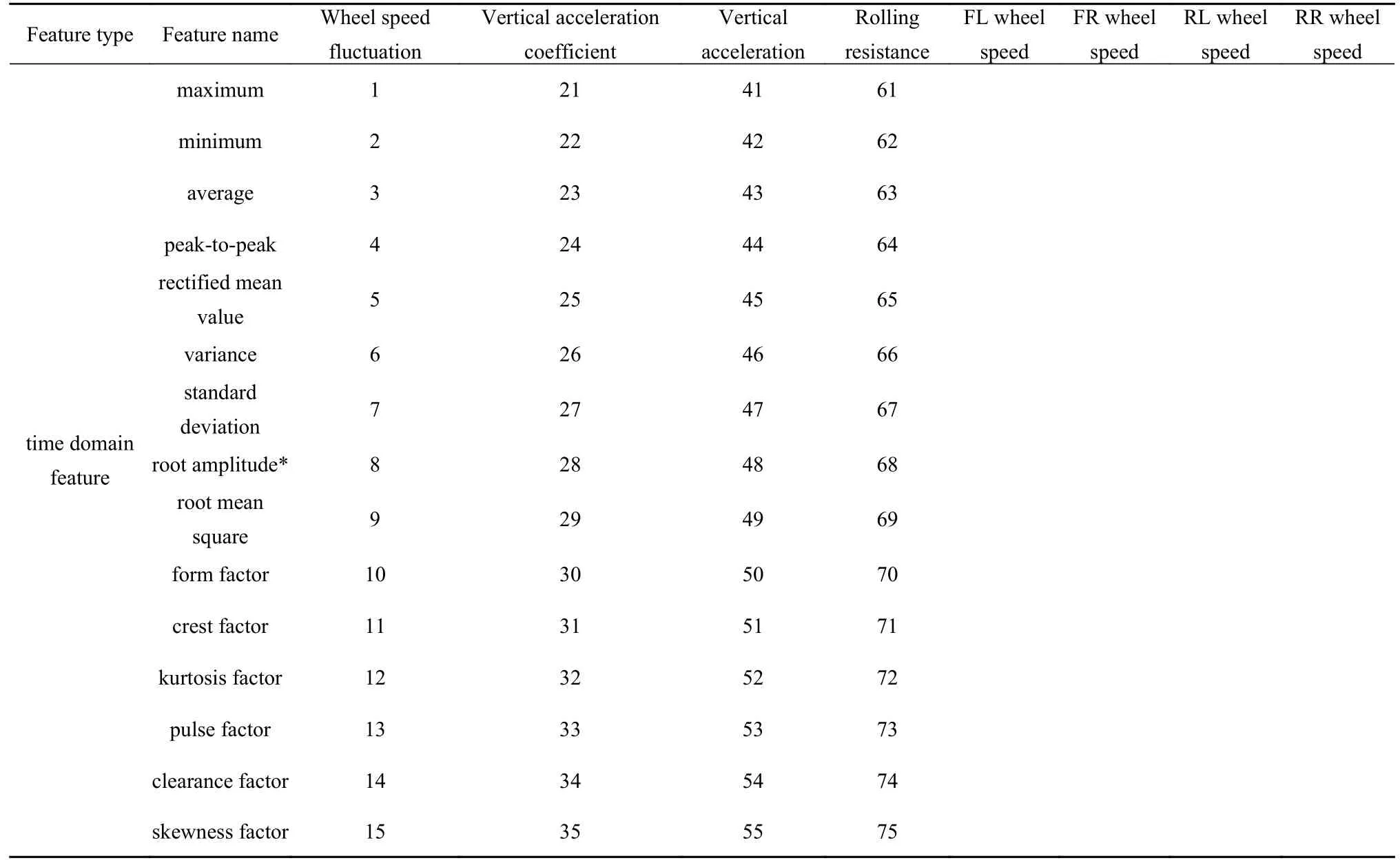
表2 特征編號列表Table 2 List of feature numbers

續表 2
2.3 基于SHAP 解釋法的模型改進
2.3.1 高維隨機森林路面識別模型設計
隨機森林(RF)是基于決策樹的集成模型,通過隨機森林可以實現多種路面識別,相比更加復雜的機器學習算法,其結構相對簡單,模型解釋的難度與計算量低.本文基于隨機森林算法構建路面識別模型,采用105 個特征進行高維路面識別模型訓練,選取決策樹棵數為100,信息純度計算標準為gini,對樹的生長不做限制,隨機森林算法的流程圖如圖11所示.
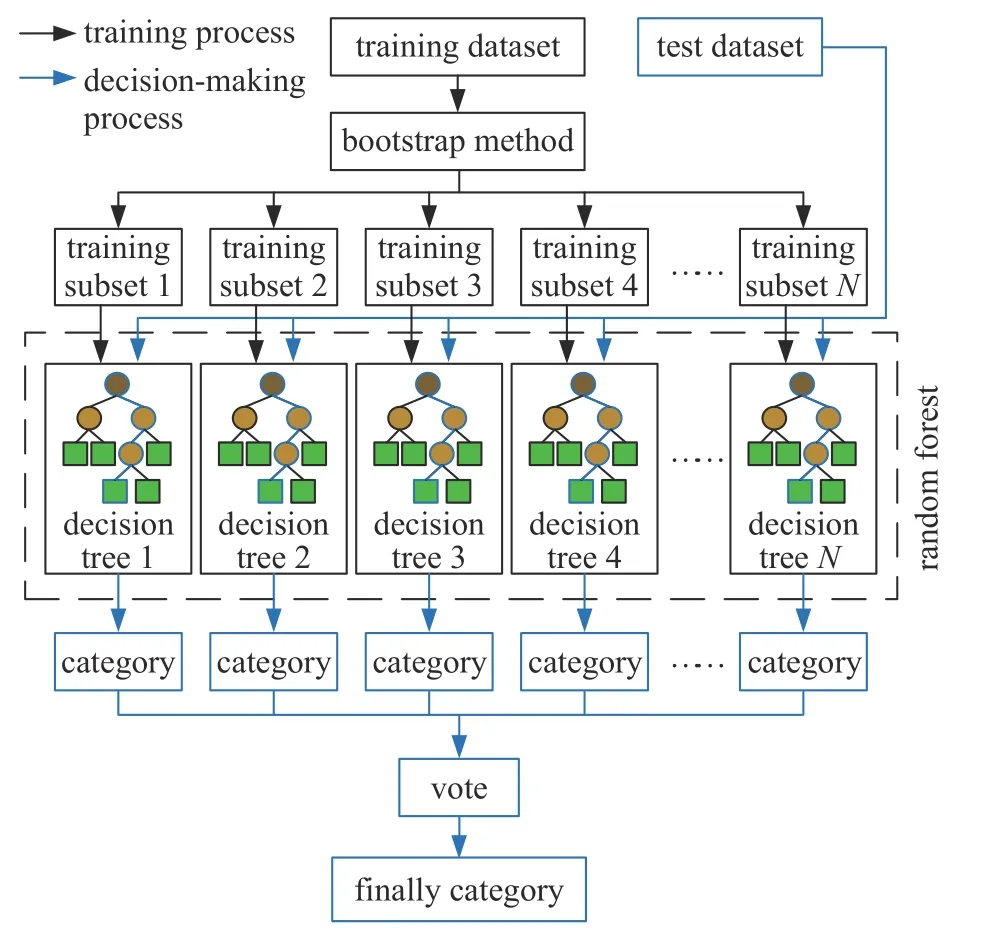
圖11 隨機森林算法流程圖Fig.11 Flow chart of random forest algorithm
2.3.2 基于SHAP 解釋法的特征篩選
SHAP 解釋法參考合作博弈的分析方法,特征篩選步驟如下.
(1)對所有被解釋樣本,計算每個特征對路面識別的貢獻,即SHAP 值,計算式為
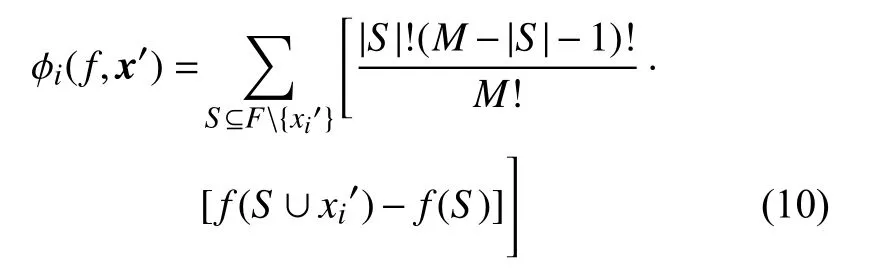
式中,M為特征的個數,F為所有的特征的集合,f為被解釋的模型,f(S)=E[f(x) |xS],xi為一個被解釋的特征向量實例,為特征向量中的第i個特征,S為F{}的子集,φi為第i個特征的SHAP 值.
(2)統計所有被解釋樣本的特征的SHAP 值絕對值的均值.
(3)選取對輸出貢獻較大的特征作為降維路面識別算法的輸入.
與基于隨機森林算法的高維和降維路面識別模型相對應,采用TreeSHAP,即基于樹模型的SHAP 值簡化計算方法[33],利用節點走向與節點中樣本的比重來計算特征貢獻.E[f(x) |xS]的計算流程如圖12 所示,圖中j為節點索引,dj為在節點j中被利用的特征索引,w為節點的權重,vj為節點取值,aj,bj為節點j的子節點,r為節點中的樣本數目.
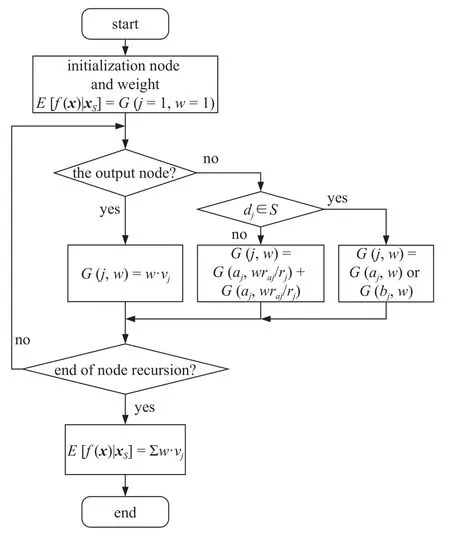
圖12 E[f(x) | xS]計算流程Fig.12 Calculation process of E[f(x) | xS]
對全部樣本的解釋結果如圖13 所示,從解釋結果來看,車輛的滾動阻力的時域特征(63,61,62,65,69 號特征)對模型輸出的貢獻最大,輪速波動量的頻域信息(18,17,16 號特征)的貢獻度次之,垂向加速度系數(29,40,27,25,26,39,21 號特征)與垂向加速度(59,41,60 號特征)的統計信息的貢獻相對較小.解釋結果可以驗證次級行駛特征輪速波動量的有效性,此外,對比發現垂向加速度系數的貢獻遠比垂向加速度大,再次驗證了垂向加速度系數這一特征的有效性.
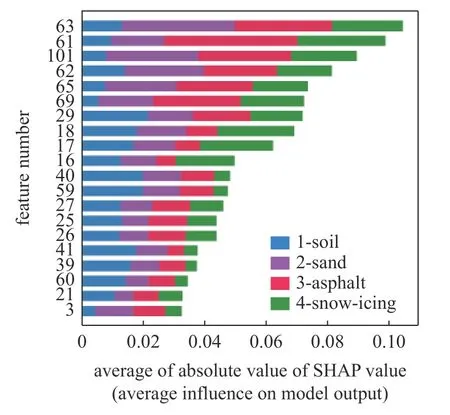
圖13 對全部樣本的解釋結果Fig.13 Interpretation results for all samples
由于本文研究的分類問題是屬于多分類問題,為了更清晰的觀察特征對于一類的識別結果的貢獻,在指定路面類別下對所有樣本的解釋結果進行輸出,得到的解釋結果用散點圖表示如圖14 所示.以SHAP 值等于0 為分界線,點分布在右側表示該特征取值會增高對應路面類型的預測概率,反之則會降低對應路面類型的預測概率,增高/降低的程度隨SHAP 值絕對值的增大而增大.
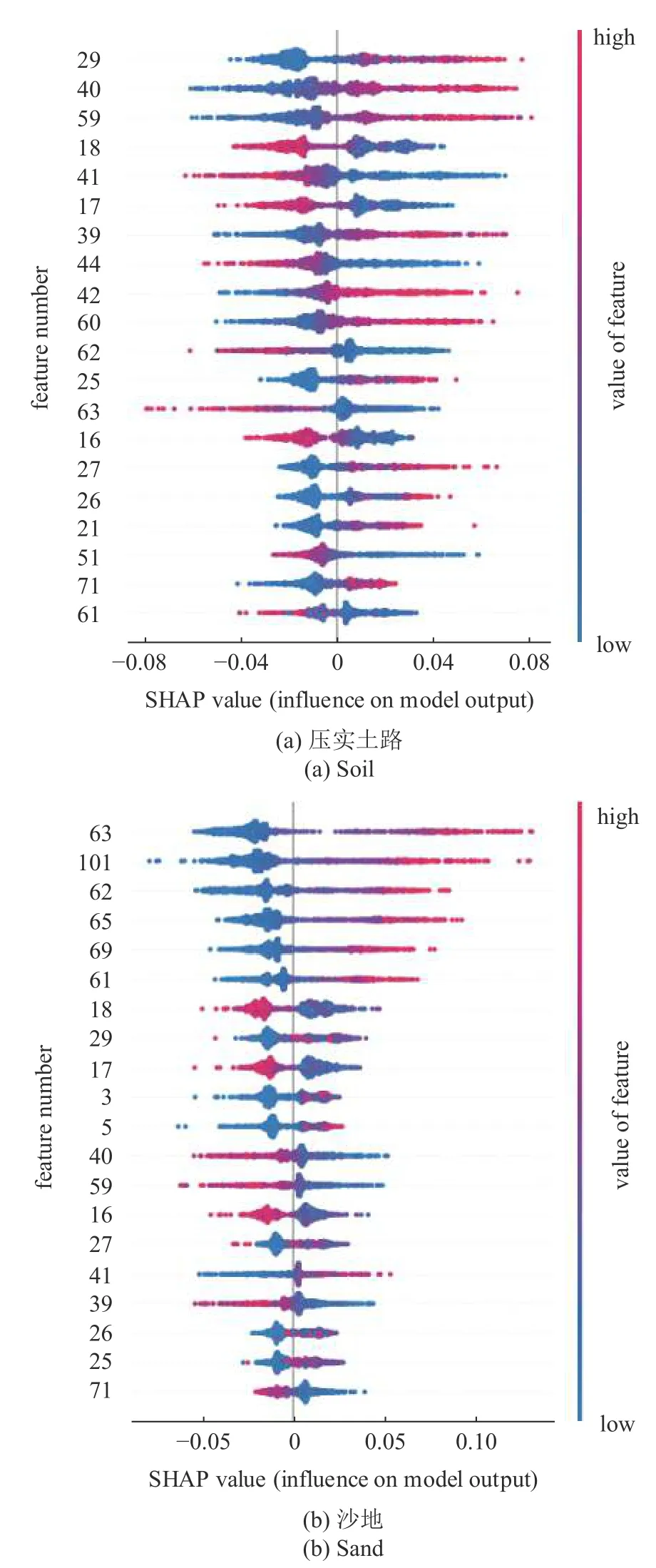
圖14 指定路面類別的SHAP 解釋結果Fig.14 SHAP interpretation results for specific road categories
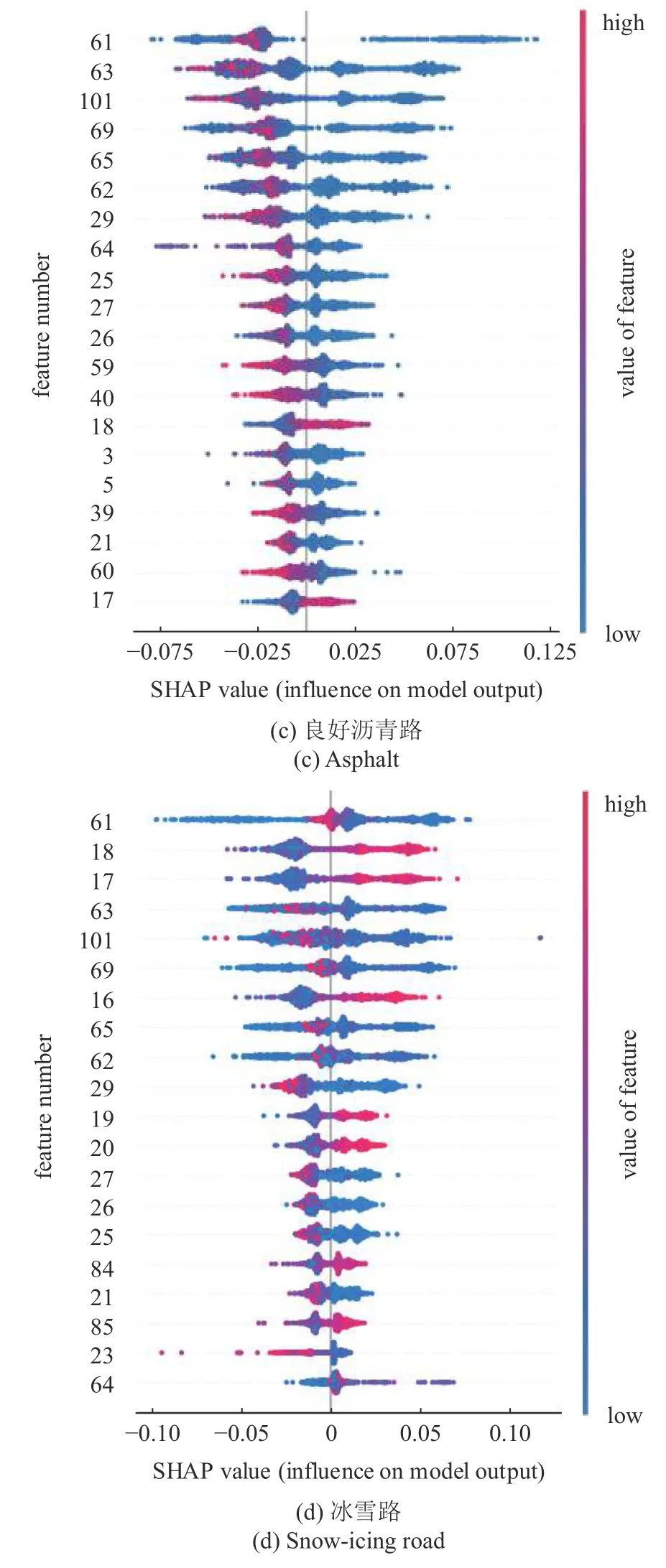
圖14 指定路面類別的SHAP 解釋結果(續)Fig.14 SHAP interpretation results for specific road categories(continued)
為了探尋特征之間的相互影響,利用SHAP 相互作用指標φi,j來尋找影響因素,φi,j的計算式為

式中i與j為被解釋的特征且i≠j,δij的計算式為

對所有的特征進行 φi,j計算便可以得到一個維度為M×M的矩陣,其中數值最大的數對應的位置代表這兩個特征的相互影響最大.
對某一特征進行具體分析,以土路類別識別中29 號特征(加速度系數均方根)的表現為例。圖15 為考慮29 號特征與40 號特征(垂向加速度系數頻率標準差)相互作用的部分依賴圖。從整體上看,29 號特征的SHAP 值隨著29 號特征值增大而增大,29 號特征值時小于0.1 時,SHAP 值為負,模型預測結果為土路的概率減小,29 號特征值大于0.1 時則會增大模型預測結果為土路的概率。另一方面,40 號特征的取值也會影響29 號特征的SHAP 值,即影響29 號特征對模型正確分類的貢獻。圖15 中樣本點的顏色表達40 號特征不同數值,偏紅表示40 號特征數值較大,偏藍表示40 號特征數值較小。由圖可見,在29 號特征值小于0.08 時,29 號特征的SHAP 值隨40 號特征取值的增大而減小,對模型正確分類的負面影響增加,在29 號特征值大于0.08 時,29 號特征的SHAP 值隨40 號特征取值的增大而增大,即提高模型正確識別為土路的可能性。
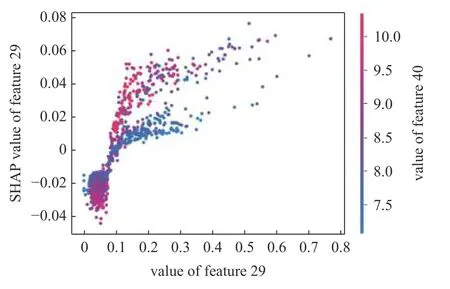
圖15 考慮相互作用的部分依賴圖Fig.15 Partial dependency diagram that consider interactions
對模型輸出影響較大的前20 個特征中,許多特征之間都存在相互作用的關系,在構建路面識別模型時應當對這些特征予以考慮;而對于對模型輸出影響不大的特征則進行剔除。本文最終選取對模型整體輸出影響排在前20 的特征 (63,61,101,62,65,69,29,18,17,16,40,59,27,25,26,41,39,60,21,3) 作為主要特征,由這些特征組成精簡特征向量,作為路面識別的依據。
2.3.3 隨機森林路邊識別模型改進
以篩選后的20 個特征作為輸入,訓練降維的隨機森林路面識別模型.根據隨機森林分類器在測試集上的準確率最高的原則,選取決策樹棵數為100,信息純度計算標準為gini,樹的最大深度為13,最小葉節點數為3,進行模型的訓練.
3 算法測試與結果分析
從采集的車輛行駛數據中得到20 000 個樣本,對壓實土路、沙地、良好瀝青路和冰雪路4 種路面,每種路面包含的樣本數量均為5000 個,對樣本集進行隨機抽樣,抽取10 000 個樣本作為訓練集,10 000 個樣本作為測試集.以精確率和召回率對算法進行評價,其中精確率評價算法的虛報程度,召回率則評價算法的漏報程度.高維路面識別模型在測試集上的分類結果評價如表3 所示.將樣本集內不同路面的特征向量輸入到降維路面識別模型中,定義壓實土路、沙地、良好瀝青路與冰雪路對應模型的輸出的值分別為1,2,3 和4,得到的輸出結果如圖16所示.降維路面識別模型在測試集上的分類結果評價如表4 所示.
圖16 降維路面識別模型的識別結果Fig.16 Recognition results of dimension reduction road identification model
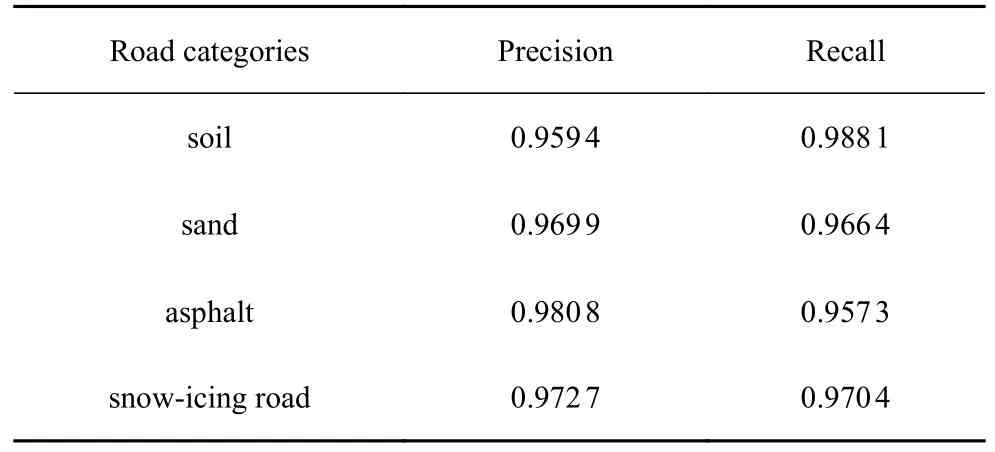
表3 高維路面識別模型評價Table 3 Evaluation of full-dimension road identification model
表3 中,高維路面識別模型能夠達到較高的識別精度,表明其對數據中的信息充分利用,能夠支撐后續模型解釋的進行,對比表3 和表4,由于特征減少,采用篩選后的特征訓練的降維路面識別模型識別精度稍有下降,但下降幅度小,對各種路面的識別精確率和召回率普遍在96%以上,下降幅度相對較大的冰雪路識別精確率和良好瀝青路識別召回率的下降幅度也不超過3.2%,即降維路面識別模型依然保持較高的識別精度,表明文本采用的SHAP 模型解釋方法能夠有效篩選對路面識別有重要作用的特征,本文基于SHAP-RF 框架設計的路面識別算法能夠在使用較少分類特征的情況下保證車輛行駛路面類別的有效識別.
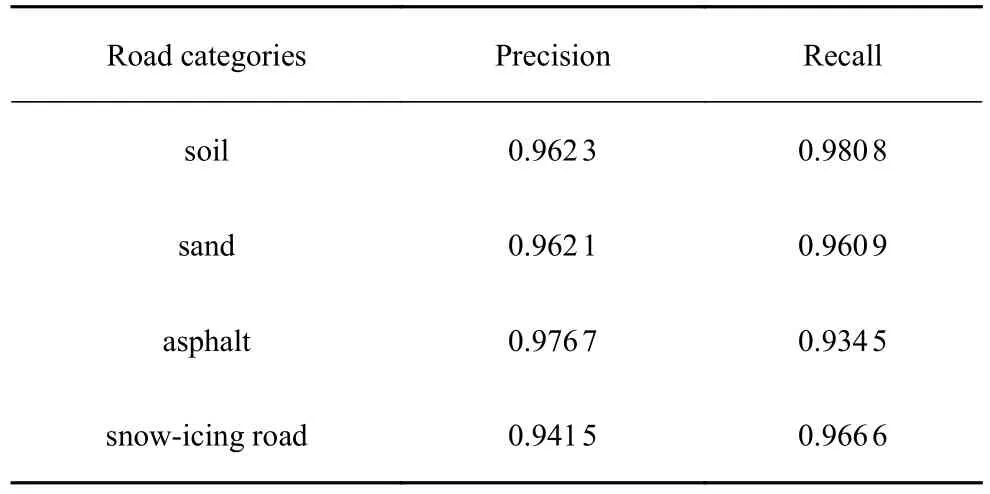
表4 降維路面識別模型評價Table 4 Evaluation of dimension reduction road identification model
對降維路面識別模型再次進行SHAP 解釋,得到的解釋結果如圖17 所示.對比圖14 所示的高維模型解釋結果,相同的特征在降維路面識別模型與高維路面識別模型中的SHAP 值分布相似,特征的相關性與之前的解釋結果基本一致,表明SHAP解釋法對特征篩選有效且整體解釋較為清晰,再次驗證了本文提出的SHAP-RF 框架的有效性.

圖17 路面識別模型的SHAP 解釋結果Fig.17 SHAP interpretation results of road recognition model
4 總結
提出了一種SHAP-RF 路面識別框架,以實車行駛數據為基礎進行特征計算和提取,訓練高維路面識別模型,采用SHAP 解釋法對高維路面識別模型進行解釋,獲取特征對模型預測結果的貢獻及影響,然后根據特征對模型影響的大小進行特征篩選,形成精簡特征向量,基于隨機森林算法訓練降維路面識別模型,通過仿真和數據回放測試驗證了算法的有效性,最終的結果表明:
(1)采用的次級行駛特征: 滾動阻力、輪速波動量和垂向加速度系數在的隨機森林路面識別模型中起到重要作用,表明這3 個特征與路面類別間的強大關聯性,同時也證明了提出的輪速波動量和垂向加速度系數的有效性.
(2)設計的SHAP-RF 路面識別算法設計框架,能夠在使用較少特征的情況下保證算法識別的準確率,基于該框架設計的降維路面識別模型在測試集上的測試結果表明,模型在4 種路面上的識別精確率和召回率普遍在96%以上,而冰雪路識別精確率和良好瀝青路識別召回率分別為94.15%和93.45%,相對于高維路面識別模型的下降幅度不超過3.2%,表明降維的路面識別模型保留了原始特征中大部分的信息,證明了模型解釋的有效性,同時證明算法具有較高的識別精度.
(3)路面識別模型測試結果是基于隨機采樣的離線測試樣本進行的,雖然達到了較高的識別精度,但對于車輛主動控制而言,算法的實時運行中可能產生的識別結果跳變也會對車輛控制產生一些影響,因此未來的研究工作中應加強路面識別模型對于時序數據的處理,提高分類性能.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03