基于差分進化算法的雷達網目標分配方法研究*
2022-11-09 07:27:26李鵬飛
艦船電子工程 2022年8期
關鍵詞:分配
魯 軍 李鵬飛
(陸軍炮兵防空兵學院鄭州校區 鄭州 450000)
1 引言
隨著高技術空襲兵器的投入和戰場環境日趨復雜,低空超低空突襲、隱身目標、電子干擾、反輻射導彈等威脅更加嚴重,給防空兵部隊對空偵察帶來以下兩個主要問題:一是單一雷達裝備的探測威力有限,極易出現探測資源飽和問題;二是假如不進行雷達網內各雷達合理控制,就會出現多雷達持續跟蹤、監視同一批目標的重復探測問題,造成對空偵察資源浪費。雷達組網運用多雷達數據融合技術,對多雷達進行控制調度,能夠實現空情信息相互印證與共享、探測范圍擴展、空間分辨率和檢測性能提升,已成為了有效應對“四抗”挑戰的主要方式[1]。然而,在多目標、多批次、多方向空襲的的背景下,由于雷達裝備資源相對不足,必須要化解雷達網目標分配問題,對雷達網內各雷達進行統一調度,發揮其探測優勢,實現利用有限的雷達完成對目標的探測、跟蹤與監視。雷達網目標分配是指在滿足規定的的發現概率與合適的雷達資源調用約束條件下,為雷達網中各雷達合理分配目標探測任務,實現利用最少的雷達資源完成對雷達網責任空域中的多目標探測任務[2]。目前,已有很多學者利用遺傳算法[3]、螢火蟲算法[4]、蜂群算法[5]以及分解協調法[12]等研究雷達目標分配問題,但將差分進化算法運用于雷達網目標分配的研究還比較少。完成雷達網多雷達多目標分配,不僅能提升整體探測效能,也能間接減弱網內各雷達的探測壓力。面對復雜的戰場環境,情報人員難以快速、準確地進行目標分配。因此,必須要利用輔助決策手段,進行雷達目標分配。本文利用差分進化算法能夠完成雷達網目標分配由“人在回路中”的人力主導模式向“人在回路上”的監督調控模式轉變,實現“人機結合、自主協同”,增強雷達網整體作戰能力。
2 雷達網目標分配的數學模型
雷達網目標分配就是空情融合處理中心依據空中來襲目標的位置與合適的分配原則控制網內多雷達對目標進行跟蹤與監視,保證雷達裝備開機最少情況下整個雷達網對目標的發現概率最大。由于防空作戰要求提供可靠、準確、連續的空情保障,因此在雷達網目標分配時應堅持以下基本原則[6~9]:一是發現概率最大原則;二是開機數目最少原則;三是連續跟蹤監視原則;四是上級指定目標和威脅程度高的目標優先分配原則。
基本問題假定:雷達網由N部不同型號的雷達組成,每部雷達都能獨立探測空中目標;依據有關情報得知,敵方M批目標從不同方向進入防區,每批目標既可以是單機,也可以是多架飛機組成的編隊。
在符合雷達網對空中目標發現的給定概率p0和雷達開機數目最少的要求下,雷達網對第j批目標的發現概率為

整個雷達網對空中所有目標發現概率最大的目標分配目標函數和雷達網開機數目最少的目標函數分別為
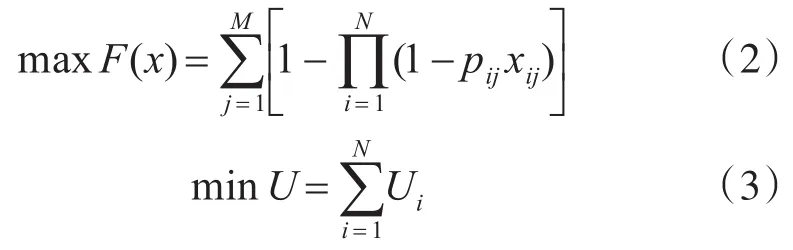
式中:maxF(x)表示雷達網發現概率最大;minU表示雷達網中雷達開機數目最少,其中Ui表示第i雷達的開關情況,關機為0,開機為1。
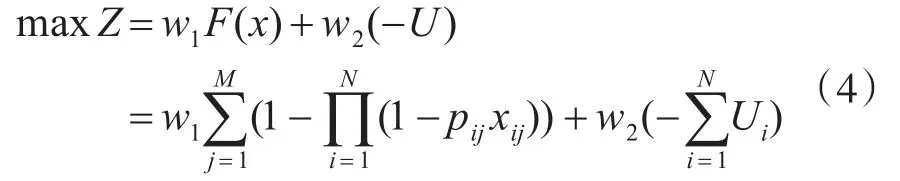
將式(2)、式(3)定義的兩個目標函數進行目標單一化處理,令F(x)的權重為w1,U的權重為w2,w1+w2=1,可得到新的目標函數為
約束條件(s.t)為
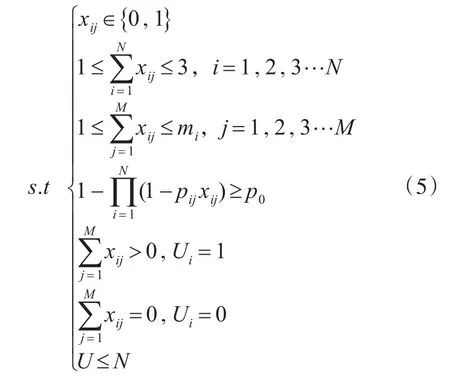
式中:約束條件xij∈{0,1}表示,當xij為1時,雷達網分配第i部雷達監視第j批目標,xij為0時,雷達網不分配第i部雷達監視第j批目標。
3 差分進化算法
差分進化算法(Differential Evolution,DE)是由Storn與Price在遺傳算法等進化思想的基礎上針對參數優化提出來的[10~11],是一種群體智能的隨機并行搜索優化算法,具有收斂快速、容易實現、結構簡單、魯棒性強等特點,主要用于求解多維空間整體最優解和解決實數優化問題。差分進化思想主要來源于生物進化,通過模仿生物群體中各個個體之間的競爭與合作,促使適應于環境的個體保留下來。該算法的運算過程主要包括初始化種群、變異、交叉與選擇等操作,算法的流程如圖1所示。
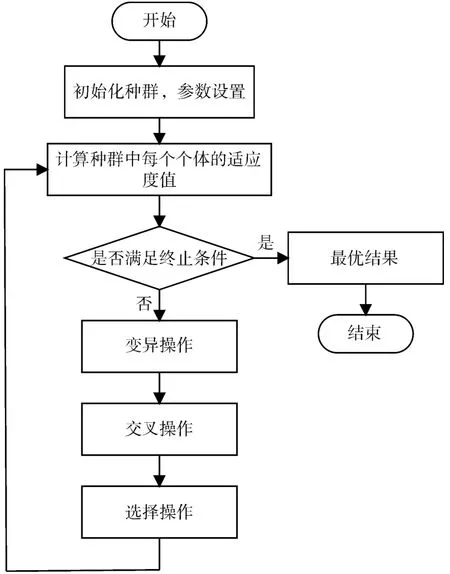
圖1 差分進化算法流程圖
利用差分進化算法求解數學模型的具體步驟如下:
1)種群初始化
在解空間中均勻、隨機地生成NP個個體,每個個體均由D維向量組成,第0代種群為

通過以下公式確定初始個體第j維元素值:

式中:xi(0)表示種群中第0代的第i個個體xj,i(0)表示種群第0代的第i個個體的第j個基因。NP表示種群的大小,[Uj_min,Uj_max]表示第j維上的取值范圍,rand(0,1)表示在[0,1]之間的隨機數。
2)變異操作
種群初始化后,通過父代差分向量生成變異向量。一般通過以下公式進行變異操作:

式中:xi(g)表示第g代種群中的第i個個體,xk2(g)-xk3(g)表示父代差分向量,F表示縮放因子,取值范圍為[0,2]。
3)交叉操作
變異操作之后,變異向量vi(g+1)與父代向量xi(g)進行二項式交叉生成新的個體向量,按照下列公式進行交叉操作:
式中:CR表示種群交叉概率,取值范圍為[0,1],jrand表示[1,2…,D]中的隨機數。
4)選擇操作
交叉操作之后,新的個體向量與父代向量進行競爭選擇,將個體向量mi(g+1)與父代向量xi(g)對應的適應度值進行對比,本文的適應度函數為目標函數且為函數極大值,選擇一個適應度值最好的作為下一代個體。差分進化算法通常利用貪婪算法篩選出進入下一代種群的個體:

4 仿真試驗及分析
為驗證本文所提出的雷達網目標分配方法的可行性與算法的有效性,在PC機上用Matlab2012進行仿真試驗分析。依據有關情報可知,雷達網由N部雷達網組成,有M批目標進入我防區,對我重要保衛目標造成威脅。通過本文構建的目標分配數學模型和目標分配流程,對雷達網目標分配問題進行求解,得到雷達網探測概率最大且雷達開機最少的目標分配方案。利用文獻[12]給出的7部雷達與12批目標的的實驗數據進行仿真對比分析,各部雷達對來襲目標的探測概率如表1所示。其中,M=12,N=7;探測概率小于0.5時,認為雷達沒有發現該目標,將其值置為0。
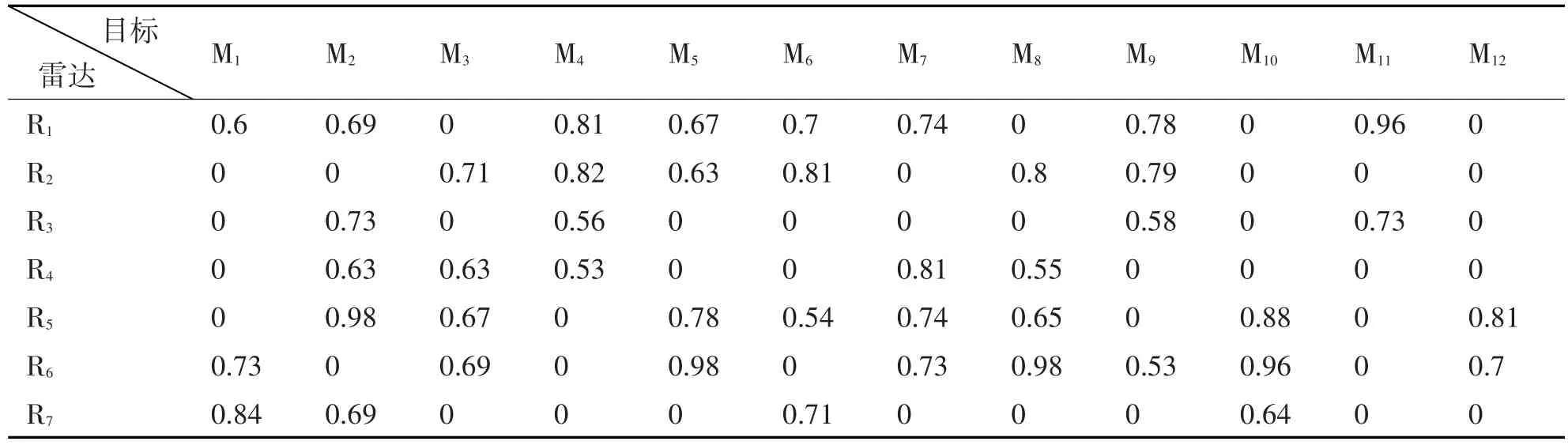
表1 雷達對各批目標的探測概率
假設P0=0.95,mi=50,種群規模NP=30,交叉概率CR=0.2,縮放因子F=0.5,終止條件為迭代1000次。利用差分進化算法求解文中構建的雷達網目標分配數學模型,可得到差分進化算法收斂曲線如圖2所示,從圖中可以看出,在迭代400次后,獲得了雷達網最優目標分配的適應度值。
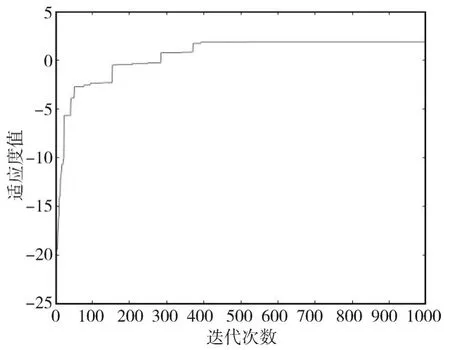
圖2 差分進化算法收斂曲線圖
為驗證本文所提方法的可行性,將基于差分進化算法和基于文獻[12]的分解協調法雷達網目標分配方案進行對比分析。如表2所示為基于分解協調法的目標分配方案,表3所示為本文利用雷達網目標分配模型和差分進化算法得到的雷達網目標分配方案。
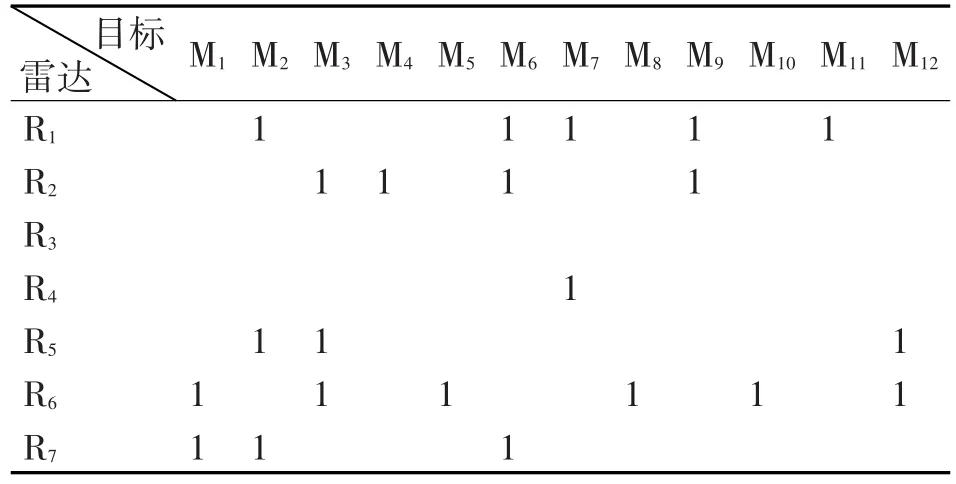
表2 基于分解協調法的雷達網目標分配方案
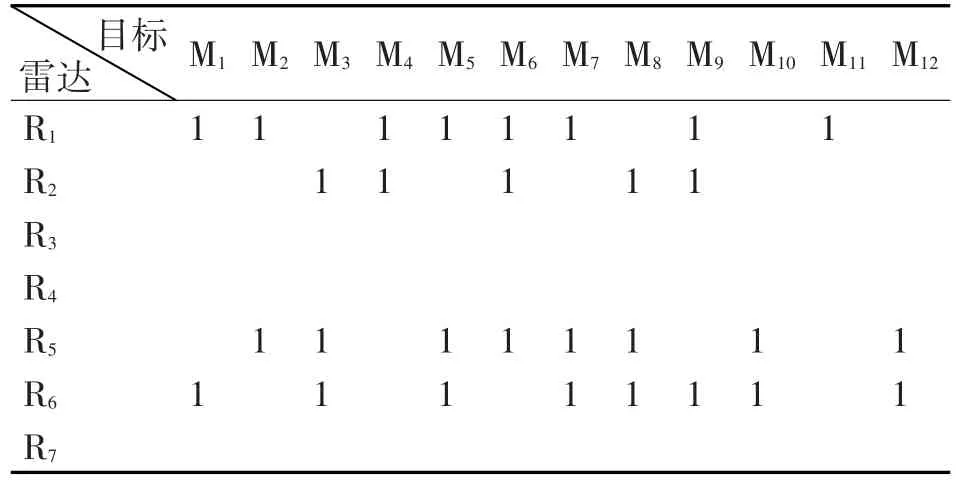
表3 基于差分進化算法的雷達網目標分配方案
由表2可知,文獻[12]提出的分解協調法能夠解決雷達目標分配問題,在滿足雷達最大探測概率的情況下,防區部署的7部雷達只開了6部,第3部雷達可以關閉,降低被敵方發現的概率;從表3可得,運用本文提出的數學模型與差分進化算法對雷達網目標進行分配,在符合雷達網對空中來襲目標探測概率最大和雷達開機最少的要求下,完成雷達網目標分配任務,其中雷達網中7部雷達只需開機第1、2、5、6部雷達,其他3部雷達可關閉,最大限度地減少了雷達輻射,提高了雷達網戰場生存能力;通過表2與表3的目標分配方案對比可以發現,本文提出的基于差分進化算法的雷達網目標分配方法可行,且分配的效果較好,能夠很好地解決雷達網目標分配問題,提升了雷達網整體探測效能。
5 結語
雷達網目標分配是防空兵對空偵察任務的重要內容,合理有效地進行目標分配,是在雷達裝備相對不足的情況下完成多目標的有效探測與連續跟蹤的關鍵。本文提出了基于差分進化算法的雷達網目標分配方法,基于目標分配基本分配原則,建立雷達網目標分配模型,并利用差分進化算法對目標函數進行尋優,能夠得到雷達網目標分配方案。通過仿真試驗,將本文提出的方法與分解協調法進行對比分析,證明該方法的有效性與可行性,為解決復雜戰場條件下雷達網目標分配問題提供了一個新的參考方法。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40