無人機傾斜攝影測量建模在城市規劃中的應用
2022-11-12 04:15:46韋通
智能城市 2022年9期
韋 通
(山東省國土測繪院,山東濟南 250000)
隨著城市發展,高層建筑物數量不斷增加,城市逐步走向立體化和規模化。傳統城市規劃采用基礎測繪技術手段獲取的二維線畫圖作為規劃底圖,缺乏直觀性,現有平面地圖難以滿足城市建設、應急保障、城市規劃的需求。與二維數據相比,三維數據具有直觀且數據信息豐富等優勢,可以動態、多維度地展示城市,輔助開展城市建設。三維城市建模已逐步取代二維數據,成為城市規劃建設的主要工具。
城市三維建模的源數據是多樣的,包括衛星影像數據、近景攝影測量數據以及無人機航拍數據,用于城市規劃的三維建模具有精度要求,無人機傾斜攝影測量因具有拍攝范圍廣、建模速度快、精度較高的特點,且其獲取數據的成本較低,滿足城市規劃所需三維建模的需求。
1 傾斜攝影測量的關鍵技術
1.1 影像匹配
不同像片的重疊位置的同一坐標點,如同十字路口拐角,即為同名點,需要提取兩幅像片的同名點進行影像匹配。影像匹配的結果直接影響數字表面模型和三維模型的精度,對三維模型的成果質量至關重要。與正射影像相比,傾斜攝影多角度獲取影像數據,冗余信息豐富,同名點信息較多,易發生修正錯誤。特征點匹配方法具有匹配精度高、適應能力強的特點,很多傾斜攝影測量軟件是基于特征點的方式進行影像匹配,采用高斯金字塔的匹配策略提高匹配精度。
高斯差分金字塔匹配原理如圖1所示。
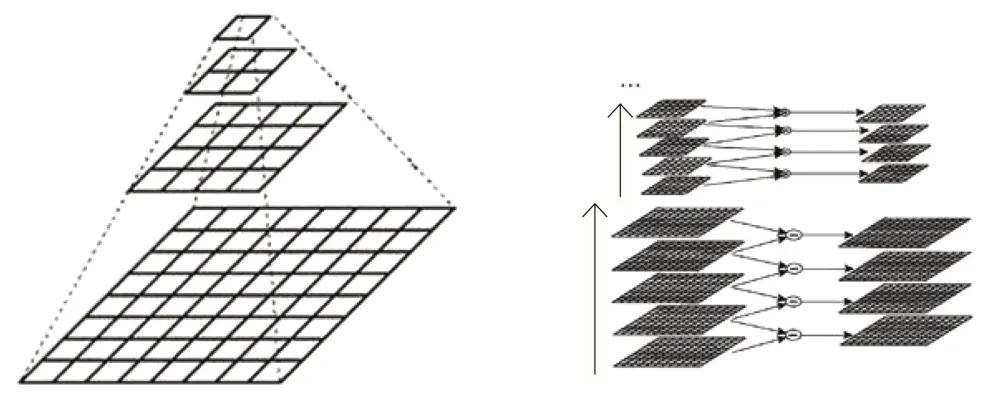
圖1 高斯差分金字塔匹配原理
1.2 多視影像平差
傾斜攝影測量從多個角度獲取影像,需結合POS外方位元素,采用多視圖的平差方法開展工作。使用高斯差分金字塔匹配方法獲取像片的精確外方位元素,建立控制點坐標、外方位元素的誤差方程,通過多匹配基元數據進行數據誤差修正。空中三角測量為平差工作的重點,是根據少量的地面控制點,按照一定的數據模型計算待定點坐標的處理過程,目前多采用光束法。
光束法三角測量如圖2所示。
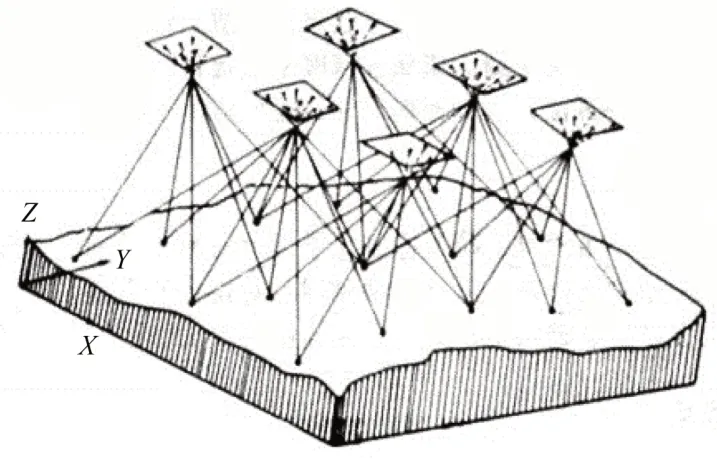
圖2 光束法三角測量
1.3 傾斜攝影點云構建
使用密集的點云數據構建網絡格網面更加準確,通過規則格網和不規則的三角網建立三維模型的三角網絡,通常采用TIN作為點云的構網形式,采用波前算法、生長算法以及八叉樹等算法進行三角面的構建,多個三角面可以構成一個整體,生成三維模型。
TIN構建三維模型如圖3所示。
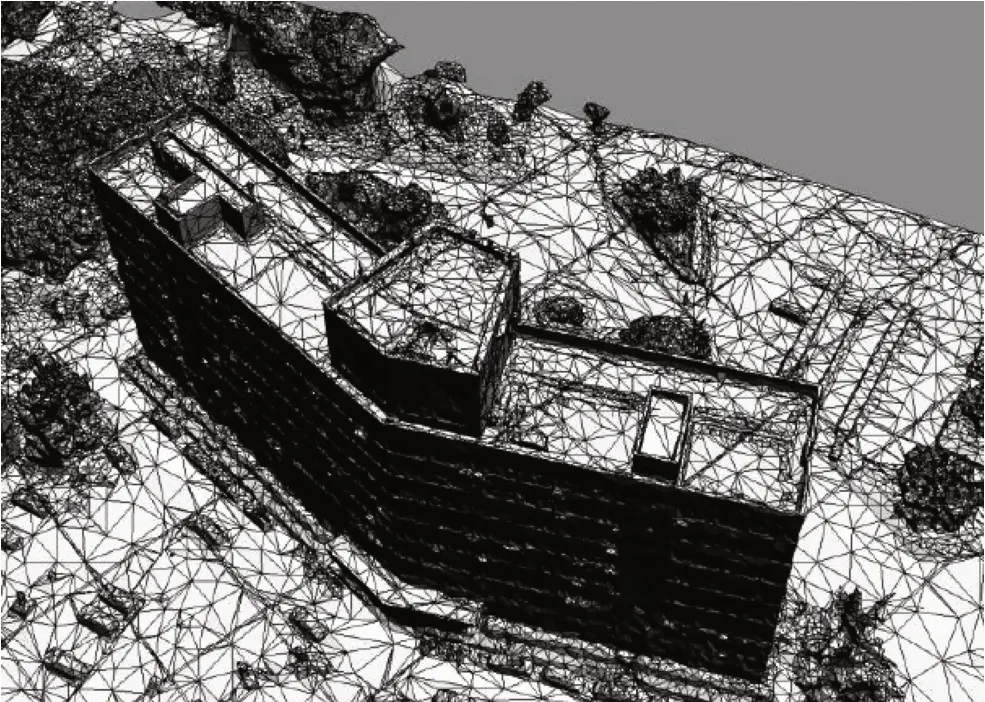
圖3 TIN構建三維模型
1.4 紋理提取
采用自動提取的方式進行目標紋理的提取,采用篩選的方式進行初步選擇,根據投影矩陣,每張像片均能夠展現目標三角面投影,裁減超出部分。建立三維模型與二維平面像片紋理之間的對應關系,進行紋理映射,其本質是將二維的紋理點坐標換算至三維物體表面,使其三維模型展示與實物相符。紋理提取時應盡量選擇清晰的像片。
2 基于傾斜攝影測量建模
試點區域選擇濟南市某校區,該區域建筑物較多且樣式多樣,適用于三維模型展示。
試點區域正射影像如圖4所示。
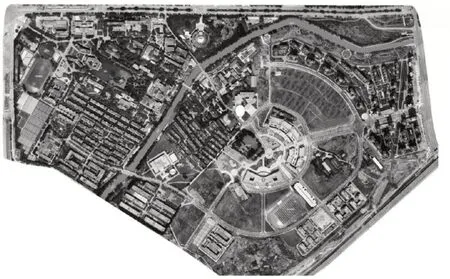
圖4 試點區域正射影像
2.1 無人機航線規劃
無人機飛行航線的規劃主要有航線的設定、飛行航高的設定、航行和旁向重疊度等因素;選擇較晴朗且無風的天氣開展飛行。試驗采用大疆四旋翼無人機,相機型號為SONY-7R,傳感器大小為36.0 mm,相機的焦距為35.320 2 mm。

式中:H——相對航高(m);f——相機的焦距(mm);GSD——地面的分辨率;α——像元大小。
根據無人機傾斜攝影相關測量規范,無人機像片的航向重疊率不得低于53%,一般為60%~80%;旁向重疊率一般不低于15%,通常為30%~60%。本次試驗的傾斜攝影建模對影像獲取的質量要求較高,設定航向重疊率和旁向重疊率均不低于80%。本次飛行的高度相對地面為550 m。
航線規劃如圖5所示。
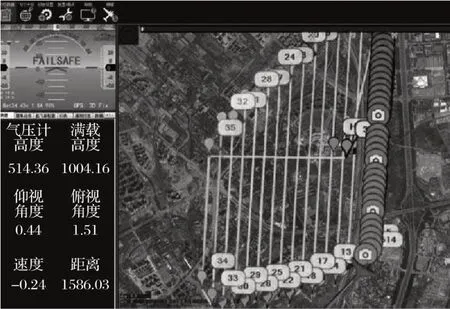
圖5 航線規劃
為了保證試驗區域建模的完整性,航線規劃應略大于觀測區域,確保測區范圍能夠順利完成建模。采用Smart 3D軟件進行航攝數據處理,運用計算機視覺算法構建三維模型,采用POS數據結算外方位元素,利用基于特征的匹配算法匹配特征點,獲取高精度的同名點。
2.2 控制點布設
控制點應滿足平面和高程精度要求,保證其布設的質量和數量滿足像片控制精度的要求。布設控制點時應避免在密集建筑物、大型水域附近,可以選擇較空曠的路口、紋理差異較大的拐角等地點,像控點的布設應避免在測區邊界。
本次試驗采用CORS系統進行控制點的布設,CORS系統是動態點位坐標定位技術。以CORS基準站位固定點,用一臺GPS接收機為流動站接收GPS信號,采用區域網布設方案進行控制點布設。
區域網布設方法如圖6所示。
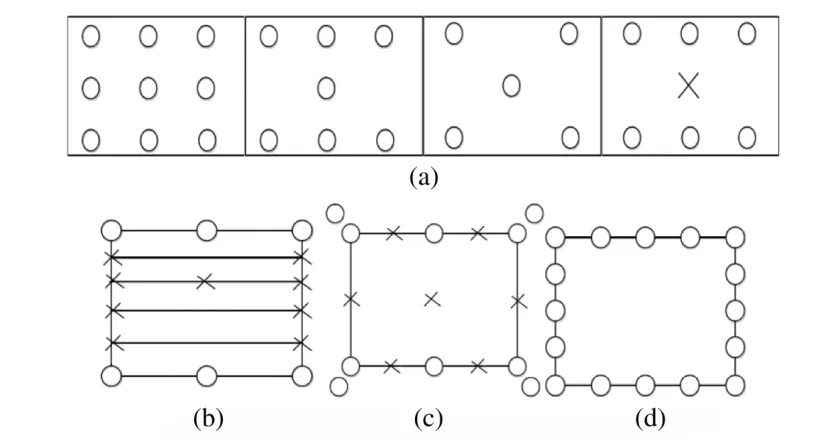
圖6 區域網布設方法
圖6(a)方法表示在測區中間位置布設高程點,在四周位置布設平高點;圖6(b)方法表示旁向重疊率較低時,需要增加重疊區域的高程點數;圖6(c)方法表示采用光束法進行平差模型,需要在關鍵位置布設平高點;圖6(d)方法表示在測區邊界密集布設平高點,以滿足外業要求。
3 城市規劃管理服務平臺
三維城市模型能夠全方位展示城市的建設成果,并實時更新,使用者可以動態監督城市的土地利用變化情況,更加全面地對城市發展進行科學規劃,三維模型可以為城市規劃提供技術支持。數字化城市規劃管理服務平臺可以實現數據共享,實現多單位、多部門的聯合辦公,實現業務的高效化。
城市規劃管理服務平臺可以實現空間數據的可視化,將傾斜攝影三維模型建立三維GIS規劃系統,為城市規劃管理提供必要的信息數據支持,通過數據分析得出規劃所需的數據結果。基于GIS建立的三維城市規劃系統可以有效地結合多種地理信息數據,不斷更新城市規劃所需信息;通過GIS系統所特有的空間分析、疊加顯示等功能,為規劃部門提供輔助信息。
三維GIS規劃系統功能如圖7所示。
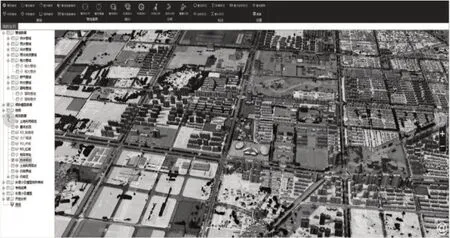
圖7 三維GIS規劃系統功能
結合GIS建立的傾斜攝影三維模型,模擬規劃區域的建筑物和街道等實物,對現有的建筑物進行查看并提供參照,可以得到規劃后的效果圖。制定城市規劃方案時,可以參照三維模型進行準確的測量,對建筑物區域的容積率、光照時長等進行計算和效果計算。在三維實景平臺中,可以充分利用GIS系統的空間分析、定位、查詢、統計等功能,根據規劃后的效果圖全面展示目標區域內的街道實景。
三維城市規劃系統平臺能夠直觀地展示建筑物的三維仿真模型,用戶可以從各個角度和方位對規劃后的建筑物細節進行觀察,交互修改模型數據,查詢相關屬性信息。在查詢功能中,可以通過設施的類型、關鍵字段以及其他屬性字段進行單一屬性查詢,也可以通過多字段進行搜索查詢,通過定位顯示進行地圖瀏覽。
基于傾斜攝影測量獲取三維模型,采用GIS系統開發基于三維模型的城市實景,用于城市規劃管理平臺展示,通過平臺系統對城市內的道路和建筑物信息進行仿真,在平臺內可以進行街景的瀏覽與查詢。制定城市規劃方案時,傾斜攝影模型結合GIS平臺為城市建設提供指導數據,也可以根據實際需求,對小區或者特定的建筑物進行日照分析、控高分析以及通視性分析,為城市規劃管理提供重要的輔助決策數據。隨著三維建模技術和GIS技術的發展,傾斜攝影測量技術在城市三維建模中發揮著越來越重要的作用,其可以實現城市規劃數字化與模型化,解決城市規劃中的數據規范、標準統一的問題。
4 結語
研究基于無人機傾斜攝影測量建立三維模型,結合GIS系統建設規劃服務平臺。文章闡述傾斜攝影測量測量的相關技術,詳細介紹無人機傾斜攝影測量獲取數據的主要技術流程,基于三維模型建設規劃服務平臺,將城市三維模型應用于城市規劃建設中。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19