雙側電驅履帶車輛模糊自適應滑模轉向控制
2022-11-17 12:49:26張道德胡新宇
河南科技大學學報(自然科學版) 2022年1期
關鍵詞:信號
魏 瓊,金 鵬,張道德,周 剛,胡新宇
(湖北工業大學 機械工程學院, 湖北 武漢 430068)
0 引言
電傳動履帶車輛較液力機械傳動具有結構簡單、傳動效率高的優勢,但雙側獨立電驅履帶車輛行駛時阻力受行駛狀態、路面參數等因素影響,呈現非線性、不確定動態變化,轉向過程中存在控制一致性差、轉向響應慢等問題[1-4],因此設計優良的轉向控制算法對提高履帶車輛運動性能尤為重要。
目前,國內外針對車輛轉向運動控制進行了大量的算法和控制結構研究,極大地提高了雙側電驅動履帶車輛的轉向性能。文獻[5]設計了驅動控制方案和算法,提出了調速和轉矩調節控制策略,在不同工況下的仿真結果驗證了兩種控制策略的可行性和有效性。文獻[6-9]提出了一種基于模糊比例-積分-微分(proportion-integration-differentiation,PID)算法和反向傳播(back propagation,BP)神經網絡的轉向控制策略,以提高轉向系統的動態響應能力。駕駛員的轉向意圖被解析為內部電機制動扭矩。文獻[10]采用模糊自適應算法對車輛轉向進行控制,通過“軌跡-角度-電流”3層模糊自適應PID算法輸出電子助力轉向(electric power steering,EPS)系統控制信號,提高了轉向的穩定性和準確性。文獻[11]提出了一種基于模糊控制的轉向補償控制策略,該策略以踏板、方向盤和變化率信號為輸入變量,以提高轉向靈敏度。文獻[12]以雙電機耦合電傳動履帶車輛為對象,設計了一種解耦的速度-橫擺角速度控制結構,研究了滑模控制算法,實現了解耦條件下的穩定轉向控制。上述研究大都采用基于穩定速度下的車輛轉向控制方法,未對全范圍速度下的車輛轉向進行良好的控制。本文基于上述研究,提出了一種基于模糊自適應調節的滑模控制,有效地降低了滑模抖振,同時具備響應速度快、抗擾動能力強的優點,能夠實現履帶車輛的穩定轉向。
1 雙電機獨立驅動履帶車輛模型
以KOMODO-01通用型履帶車輛為例,該車型具有通過性強、重心低、運行平穩的優點。其內部搭載高扭矩無刷直流電機,兩側主動輪分別由電機單獨驅動。履帶車輛實際轉向過程較為復雜,為了突出轉向過程的不確定性問題,考慮履帶車輛行駛時影響其穩定性的主要因素,忽略車輛行駛時空氣阻力和懸架系統的影響,基于理論轉向進行分析,對履帶車瞬態轉向作出如下假設:(Ⅰ)履帶車輛質心與形心重合;(Ⅱ)履帶車輛接地部分法向載荷分布均勻;(Ⅲ)轉向過程中忽略內外側履帶的滑移和滑轉。履帶車輛運動學及動力學模型如圖1所示。

圖1 履帶車輛運動學及動力學模型
履帶車輛轉向過程按轉向半徑劃分,不同轉向半徑下兩側電機輸出力矩有所不同,有3種轉向工況[13]。設R為履帶車輛轉向半徑,Rf為履帶車輛自由轉向半徑,B為履帶中心距。相對轉向半徑ρ=R/B,ρ>ρf時為大半徑轉向;0<ρ≤0.5時為小半徑轉向;0.5<ρ≤ρf時為中半徑轉向[14]。由于大半徑轉向時工況與中半徑轉向近似,同時中半徑轉向時兩側電機工作較為復雜,本文對中半徑轉向工況進行分析。
圖1中,F1和F2分別為履帶車輛牽引力與制動力,Ff1和Ff2分別為兩側履帶受到的摩擦阻力,Fq和Fh為車輛所受橫向阻力,Mμ為轉向阻力矩,T1和T2為兩側電機輸出力矩,v1和v2為兩側履帶速度,vc和ωc分別為履帶車輛的車速及轉向角速度,o為轉向中心,c為車輛質心。
對轉向過程分析,將車輛的轉向分解為橫向擺動和縱向平移運動,推導出履帶車輛兩側履帶所受外力及外力矩,以及電機提供的牽引力及制動力,建立轉向動力學模型。根據假定條件,車輛受力及所受力矩表達式為[15]:
(1)
其中:i為減速器傳動比;η為電機軸至履帶的傳動效率;f為地面阻力因數;L為履帶接地長;μ為轉向阻力因數。
履帶車輛實際轉向是一個非穩態過程,設Fd為不確定性縱向阻力,Md為不確定性阻力矩,J為轉動慣量,根據履帶車輛動力學模型推導出履帶車輛動力學方程為[16]:
(2)
將式(1)代入到式(2)中可得:
(3)
2 轉向控制系統分析與算法研究
本文研究的履帶車輛采用遙控器進行車輛運動控制,對于整個控制系統,輸入信號為遙控器的車體直行與轉向通道2通道信號。解析為搖桿油門信號和轉向信號,暫不考慮制動信號,均為比例控制。為了實現對履帶車輛的閉環控制,對油門信號和轉向信號進行解析,對應得到履帶車輛的行駛速度和轉向角速度[17]。根據已知的油門信號,解析為履帶車的目標車速,解析公式為:
(4)

同理,將搖桿轉向信號解析為轉向角速度,解析公式為:
(5)


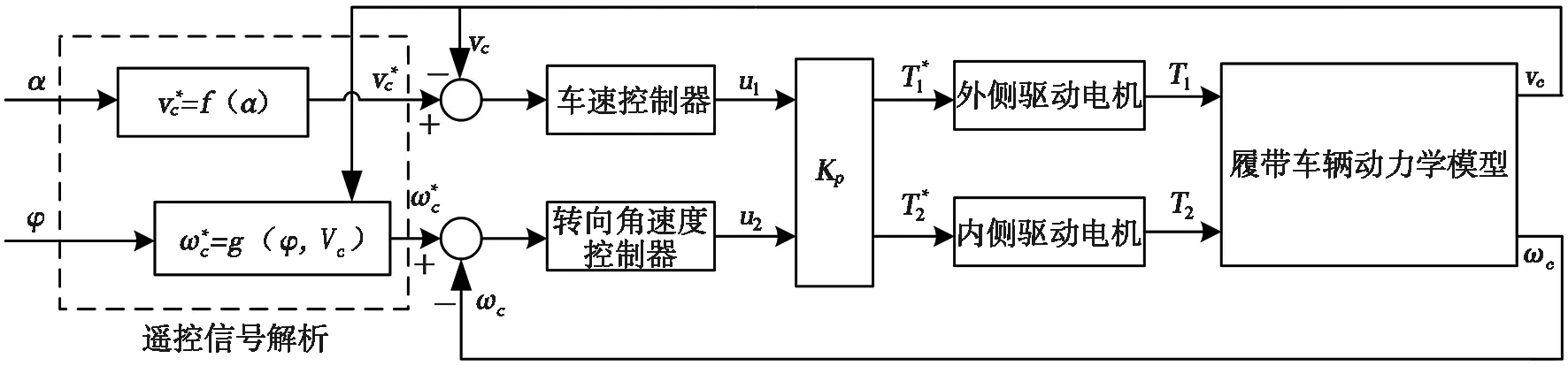
圖2 整車控制系統結構框圖
(6)
設Kp為控制量增益矩陣的變換矩陣,控制器輸出控制量為u1和u2,則控制量與電機輸出力矩關系為:
(7)
車輛轉向時車速和轉向角速度呈非線性的變化,滑模變結構控制(sliding mode control,SMC)算法能夠實現帶有不確定性和未知外干擾的非線性系統魯棒控制[18],因此,本文采用SMC算法結合模糊自適應算法重新設計控制器,對傳統的滑模控制進行改進,并利用仿真模型進行與PID算法的對比驗證。
2.1 車速滑模變結構控制器設計
車速控制的核心在于對期望信號的快速跟蹤以及克服路況變化,增強對擾動的魯棒性[19]。滑模控制能夠有效地克服擾動,但容易出現較大的穩態誤差,本文在滑模控制算法中引入積分項,可以降低跟蹤車速信號的穩態誤差,提高行駛的穩定性。根據式(6),車速控制子系統的狀態方程為:
(8)
引入積分項可以得到積分滑模面:

(9)
控制律設計為:
u1=ueq+usw,
(10)
(11)
usw為切換控制量,理想的滑模控制律常采用符號函數,然而在實際的滑模變結構控制中,滑動模態呈抖振形式,所以采用飽和控制函數替代符號函數。設δ1為切換增益,ε為邊界層厚度,則有:
usw=δ1sat(s1/ε),δ1>0。
(12)
根據式(10)、式(12)和式(13)可得設計的滑模控制律為:
(13)
證明(Ⅰ)當s1≥ε1時,滑模在邊界層外,sat(s1/ε1)=sgns1,
(Ⅱ)當s1≥ε1時,滑模在邊界層內,sat(s1/ε1)=s1/ε1。
2.2 轉向角速度自適應模糊滑模控制器設計
轉向角速度控制的核心問題是對目標轉向角速度的快速跟蹤,以及適應轉向阻力的非線性變化和克服不確定擾動,實現穩定轉向。履帶車輛轉向過程受轉向半徑、履帶車速以及路面參數變化影響較大,其中地面轉向阻力難以進行定量的數學分析,所以引入模糊自適應控制項期望對轉向阻力進行在線逼近,保證控制系統的適應性和控制精度;結合滑模控制,提高系統的魯棒性,同時通過模糊控制項柔化控制信號,減小滑模抖振[19-20]。轉向角速度控制系統原理如圖3所示。

圖3 轉向角速度控制系統圖
根據式(6),轉向角速度控制子系統的狀態方程為:
(14)
(15)
(16)
控制律設計為:
u=ueq+usw,
(17)

(18)
采用模糊自適應算法,模糊自適應項對未知的地面轉向阻力因數進行逼近,以提高精度。令f(s)=μ,根據模糊逼近理論,采用徑向基函數對μ進行逼近。
μ=a*Tξi(s)+δ2,
(19)
其中:a*為最優權重向量;δ2為逼近誤差,滿足|δ2|≤β,β>0;ξi(s)為模糊基函數向量,ξi(s)滿足:
(20)
采用單模糊輸入系統將切換函數作為模糊數輸入,減少模糊規則的數量,采用高斯隸屬度函數,可得:
(21)

(22)
根據模糊逼近理論,可調參數ai最優時,存在一個最優參數估計值逼近μ*,假設最優參數估計值為:
(23)

(24)
對于自適應算法的逼近誤差,設計切換控制算法usw來消除,可得:
usw=-βsat (s2),
(25)
當s1≥ε1時,滑模在邊界層外,sat (s1/ε1)=sgns1。

3 仿真分析與實驗驗證
為了驗證本文所設計的履帶車輛轉向控制方法的可行性及控制性能,基于履帶車輛動力學模型及控制算法,在MATLAB/Simulink軟件中進行仿真驗證。其中,控制器各項參數:車速控制器中k1=0.36,δ1=20,ε1=0.6;轉向角速度控制器中k2=200,ε2=0.2,β=120,γ=180;最大阻力因數μmax=0.8。雙側電驅履帶車輛主要技術參數如表1所示。

表1 實驗履帶車基本參數
仿真實驗中設計了PID控制和SMC算法進行不同速度下不同工況轉向控制對比,其中履帶車輛輸入信號如圖4所示。斜坡信號輸入時履帶車輛的車速跟蹤曲線如圖5所示,對于漸進加速的前進和轉向運動,PID控制在跟蹤速度時會出現3%~11%的超調,SMC算法則能夠迅速達到穩定且無明顯超調;且PID控制存在0.2~0.5 s的時滯,SMC算法則能夠較為精確地跟蹤到期望信號。
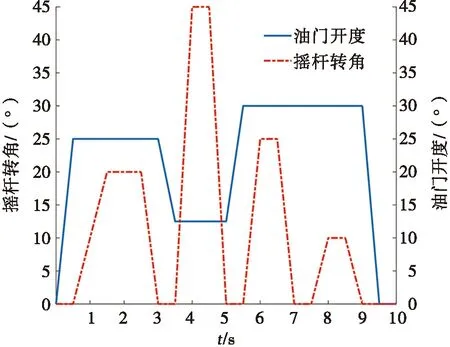
圖4 履帶車輛輸入信號
改變輸入信號為階躍輸入,進行了履帶車輛轉向實驗驗證,結果如圖6和圖7所示。3 s時履帶車輛第1次轉向,目標車速0.5 m/s,目標轉向角速度0.24°/s;6 s時第2次轉向,目標車速0.1 m/s,目標轉向角速度0.145°/s。采用了PID控制和SMC算法進行對比,對于車速的跟蹤,兩種算法都能夠較為精確的跟蹤到期望信號,但是PID控制存在約1 s的時滯,SMC算法則能夠迅速達到穩定且無明顯超調。對于轉向角速度的跟蹤,PID控制出現超調或難以達到穩態,無法精確跟蹤期望值。SMC算法能夠抑制擾動和克服路面不確定因素的影響,超調量只有4%,在車輛變速時也能夠穩定轉向,精確跟蹤期望值,車輛行駛速度與轉向角速度跟蹤響應速度較PID控制分別提高了1.9 s和0.5 s,且沒有出現較明顯的抖振和靜差。
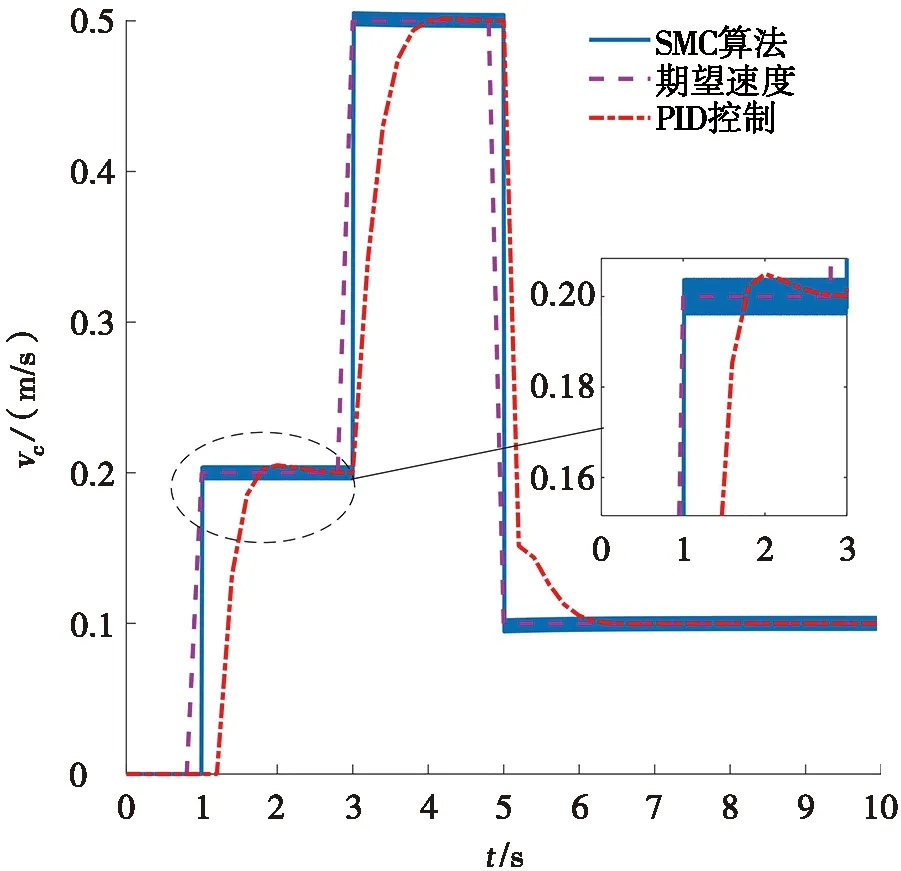
圖6 階躍輸入時履帶車輛速度曲線
4 結論
本文以雙側電驅履帶車輛作為研究對象,并對其轉向過程進行了仿真分析,將存在耦合關系的車輛轉向運動控制系統轉化為兩個單輸入單輸出的子系統,消除了耦合作用。在等效控制的基礎上,引入積分滑模項和模糊自適應項,分別用于車輛轉向時的車速及轉向角速度的控制。提出的算法能夠根據轉向時車輛速度以及角速度的不同特性進行精確跟蹤,且響應較快,抗擾動能力強,可以滿足實際轉向工況中對履帶車輛的控制需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06