永磁同步電機(jī)改進(jìn)滑模無(wú)位置傳感器控制
2022-11-18 03:25:44康爾良陳健
電機(jī)與控制學(xué)報(bào) 2022年10期
康爾良,陳健
(哈爾濱理工大學(xué) 電氣與電子工程學(xué)院,黑龍江 哈爾濱 150080)
0 引 言
隨著“雙碳”目標(biāo)的提出和新能源行業(yè)的快速發(fā)展,永磁同步電機(jī)(permanent magnet synchronous motor,PMSM)因具有結(jié)構(gòu)簡(jiǎn)單和效率高等優(yōu)點(diǎn),被廣泛應(yīng)用在日常生活和工業(yè)生產(chǎn)等領(lǐng)域中。PMSM最常用的控制方法之一是磁場(chǎng)定向控制,通常需要用編碼器等獲取準(zhǔn)確的轉(zhuǎn)速和轉(zhuǎn)子位置信息。但是,位置傳感器的安裝易受環(huán)境影響,會(huì)增加系統(tǒng)成本和降低系統(tǒng)可靠性[1-2]。
因此,永磁同步電機(jī)無(wú)位置傳感器控制一直是被關(guān)注的熱點(diǎn)問(wèn)題[3]。在眾多的估計(jì)方法中,滑模觀測(cè)器法(sliding mode observer,SMO)因結(jié)構(gòu)簡(jiǎn)單和魯棒性強(qiáng)等優(yōu)點(diǎn)被廣泛應(yīng)用在PMSM中高速無(wú)位置傳感器控制系統(tǒng)中[4-7]。
針對(duì)滑模觀測(cè)器中sign函數(shù)的存在會(huì)造成抖振問(wèn)題[8],文獻(xiàn)[9-13]中分別采用不同的連續(xù)函數(shù)取代滑模觀測(cè)器中的sign函數(shù)作為切換控制函數(shù),從而減小抖振,提高轉(zhuǎn)速和轉(zhuǎn)子位置估計(jì)精度。文獻(xiàn)[14-19]中采用超螺旋滑模觀測(cè)器(super twisting algorithm-sliding mode observer,STA-SMO)對(duì)轉(zhuǎn)速估計(jì)。相比采用sign函數(shù)作為切換函數(shù)的一階滑模觀測(cè)器而言,STA-SMO是將sign函數(shù)放在滑模變量的高階導(dǎo)數(shù)中,控制率中會(huì)含有sign函數(shù)的積分項(xiàng),又因?yàn)榉e分本身具有濾波作用,因此可以實(shí)現(xiàn)對(duì)抖振的抑制。
但是,較大的固定滑模增益值會(huì)降低觀測(cè)器在低速時(shí)的估計(jì)精度,而較小的固定增益可能會(huì)造成高速時(shí)觀測(cè)器的不穩(wěn)定。而且,在基于STA-SMO的無(wú)位置傳感器控制系統(tǒng)中,常規(guī)PI控制器存在魯棒性差和動(dòng)態(tài)響應(yīng)慢的問(wèn)題[20]。
因此,出于提高轉(zhuǎn)速估計(jì)精度和控制系統(tǒng)魯棒性的目的,本文提出一種變?cè)鲆娴腟TA-SMO,同固定增益的STA-SMO相比,所提方法可以提高低速時(shí)轉(zhuǎn)速估計(jì)精度。根據(jù)初等擾動(dòng)觀測(cè)器的基本原理,設(shè)計(jì)出一種新型轉(zhuǎn)矩觀測(cè)器,將估計(jì)出的轉(zhuǎn)矩值應(yīng)用到基于新型趨近律的滑模轉(zhuǎn)速控制器中。相比PI控制器,基于新型趨近律和轉(zhuǎn)矩觀測(cè)器的控制器可以極大提高系統(tǒng)的動(dòng)態(tài)響應(yīng)和魯棒性。
1 永磁同步電機(jī)的數(shù)學(xué)模型
因PMSM是一個(gè)非線(xiàn)性強(qiáng)耦合的時(shí)變系統(tǒng),常假設(shè)磁路不飽和,氣隙磁場(chǎng)空間中呈正弦分布,三相定子繞組對(duì)稱(chēng),忽略渦流和磁滯損耗等因素達(dá)到簡(jiǎn)化分析過(guò)程的目的。在以上假設(shè)條件下,PMSM在α-β軸下的數(shù)學(xué)模型可以表示為:
(1)
式中:iα、iβ是α-β軸下定子電流值;uα、uβ是α-β軸下定子電壓值;Rs和Ls是定子電阻和電感;α-β軸下的反電動(dòng)勢(shì)eα=-ωeψfsinθe、eβ=ωeψfcosθe,ωe和θe是電角速度和位置角;ψf是永磁體磁鏈。忽略電機(jī)運(yùn)行過(guò)程中電感值的變化,即假設(shè)α-β軸下的電感值Ls是常數(shù)。
2 超螺旋滑模觀測(cè)器設(shè)計(jì)
2.1 超螺旋算法原理
超螺旋滑模理論是滑模控制發(fā)展中的重要成果之一,文獻(xiàn)[21]中已證明超螺旋算法具有穩(wěn)定性和有限時(shí)間收斂性,最基本的形式為:
(2)

文獻(xiàn)[21]中證明,如果式(2)中的擾動(dòng)ρ1、ρ2全局有界,即
|ρ1|≤δ1|x1|1/2;ρ2=0。
(3)
而且k1、k2增益滿(mǎn)足:
(4)
則系統(tǒng)將在有限時(shí)間內(nèi)收斂到滑模面,δ1是大于0的常數(shù)。
2.2 超螺旋滑模觀測(cè)器設(shè)計(jì)
基于上述超螺旋算法設(shè)計(jì)電流觀測(cè)器,將α-β坐標(biāo)系下的電流當(dāng)作狀態(tài)變量,即分別將x1=iα和x1=iβ代入式(2)中,則式(2)可以寫(xiě)成:
(5)
擾動(dòng)項(xiàng)ρ1為:
(6)
將式(6)代入式(5)可以得到電流觀測(cè)器方程為:
(7)
將式(6)代入式(3)中,式(3)可以重寫(xiě)成:
(8)
對(duì)于足夠大的δ1,式(8)很容易滿(mǎn)足。
由式(7)減去式(1)得:
(9)
(10)
2.3 變滑模增益STA-SMO設(shè)計(jì)
雖然STA-SMO可以減小抖振,但是為保證電機(jī)在高速域的穩(wěn)定運(yùn)行,滑模增益值必須足夠大且滿(mǎn)足式(4)中的穩(wěn)定性條件。但當(dāng)電機(jī)運(yùn)行在低速域時(shí),較大的增益值會(huì)加劇觀測(cè)器的抖振,降低轉(zhuǎn)速的估計(jì)精度。同理,較小的滑模增益可能造成觀測(cè)器高速范圍內(nèi)的不穩(wěn)定。
因此,為提高STA-SMO的轉(zhuǎn)速估計(jì)精度,本文提出一種如圖1所示的滑模增益值隨估計(jì)轉(zhuǎn)速變化的變?cè)鲆鍿TA-SMO,滑模增益值為:
(11)

因?yàn)樵谳^短的采樣周期內(nèi),可認(rèn)為轉(zhuǎn)速是保持不變的,所以在穩(wěn)定性分析時(shí)將式(11)中的k1、k2看作常數(shù)。根據(jù)電流觀測(cè)器方程和超螺旋算法原理,α軸擾動(dòng)項(xiàng)ρ1可以表示為
(12)

(13)
由以上可知,全局有界性條件可以重寫(xiě)成
(14)
(15)
(16)
必定存在足夠大的常數(shù)σ2滿(mǎn)足式(16)。
由以上分析可知,k1、k2滿(mǎn)足穩(wěn)定性條件(4),即證明提出的基于變?cè)鲆娴某菪S^測(cè)器是穩(wěn)定的。
3 新型滑模控制器設(shè)計(jì)
3.1 基于新型趨近律的轉(zhuǎn)速控制器設(shè)計(jì)
針對(duì)基于STA-SMO的控制系統(tǒng)中PI轉(zhuǎn)速控制器的魯棒性差和動(dòng)態(tài)響應(yīng)慢的問(wèn)題,提出一種新型滑模趨近律:
(17)

以下給出新型趨近律的穩(wěn)定性證明。
選擇李雅普諾夫函數(shù)
(18)
對(duì)式(18)求導(dǎo)得
(19)
以上提出的新型滑模趨近律滿(mǎn)足滑模到達(dá)條件,可以保證運(yùn)動(dòng)軌跡在有限時(shí)間到達(dá)滑模面。
基于新型趨近律的滑模轉(zhuǎn)速控制器設(shè)計(jì)步驟和基于傳統(tǒng)趨近律的轉(zhuǎn)速控制器的設(shè)計(jì)步驟相同。
首先,設(shè)計(jì)滑模切換面
(20)

對(duì)滑模切換面求導(dǎo)得
(21)
基于STA-SMO的控制系統(tǒng)中PMSM的機(jī)械運(yùn)動(dòng)方程是
(22)
式中:J是轉(zhuǎn)動(dòng)慣量;iq是q軸電流;TL是負(fù)載轉(zhuǎn)矩;B是阻尼系數(shù)。
將式(22)代入式(21)可得
(23)
將式(17)新型趨近律代入上式整理得
(24)
式(24)是基于新型趨近律設(shè)計(jì)的永磁同步電機(jī)滑模控制器輸出,即q軸電流的給定值,實(shí)現(xiàn)對(duì)永磁同步電機(jī)的轉(zhuǎn)速控制。
3.2 新型轉(zhuǎn)矩觀測(cè)器設(shè)計(jì)
根據(jù)文獻(xiàn)[22]中的擾動(dòng)觀測(cè)器模型,PMSM新型轉(zhuǎn)矩觀測(cè)器可以設(shè)計(jì)成
(25)

轉(zhuǎn)矩的估計(jì)誤差可以表示為
(26)
將式(22)代入式(26)可得
(27)
因在采樣周期內(nèi)TL是定值,系統(tǒng)的動(dòng)態(tài)誤差方程為
(28)
式(27)中含有估計(jì)機(jī)械角速度的導(dǎo)數(shù)項(xiàng),而求導(dǎo)會(huì)導(dǎo)致估計(jì)轉(zhuǎn)矩值中出現(xiàn)噪聲,會(huì)影響觀測(cè)結(jié)果,從而對(duì)控制系統(tǒng)的魯棒性造成影響。
因此,將式(27)中含有導(dǎo)數(shù)項(xiàng)的部分看作一個(gè)整體的中間變量,即
(29)
則有
(30)
改進(jìn)后的觀測(cè)器方程為:
(31)
根據(jù)李雅普諾夫理論對(duì)觀測(cè)器穩(wěn)定性分析
(32)
對(duì)式(32)求導(dǎo)得
(33)
將式(28)代入式(33)得
(34)
當(dāng)滿(mǎn)足K<0,轉(zhuǎn)矩觀測(cè)器是穩(wěn)定的。
最終,設(shè)計(jì)的轉(zhuǎn)速滑模控制器的電流給定值是
(35)
基于變?cè)鲆娴腟TA-SMO和改進(jìn)滑模轉(zhuǎn)速控制器的控制系統(tǒng)框圖如圖3所示。
4 仿真和實(shí)驗(yàn)驗(yàn)證
4.1 改進(jìn)滑模無(wú)位置傳感器控制仿真結(jié)果
為驗(yàn)證所提方法的有效性,在MATLAB/Simulink中,分別搭建基于固定增益值和基于變?cè)鲆嬷档腟TA-SMO控制系統(tǒng)仿真模型,兩者都采用正交鎖相環(huán)的方法獲取轉(zhuǎn)速和轉(zhuǎn)子位置,速度環(huán)都采用PI控制器。固定超螺旋滑模觀測(cè)器的滑模增益值k1=40,k2=200 000;變滑模增益值σ1=0.04,σ2=0.2;鎖相環(huán)的參數(shù)kp=2 000,kI=500;PI轉(zhuǎn)速環(huán)控制器的參數(shù)Kp=0.3,KI=0.7。
仿真中采用固定步長(zhǎng)2e-7,仿真時(shí)間設(shè)置1 s,仿真和實(shí)驗(yàn)中PMSM的參數(shù)如表1所示。
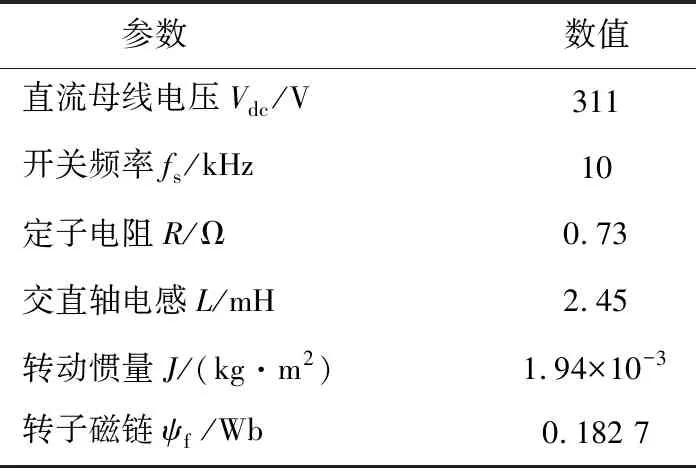
表1 PMSM模型的參數(shù)
圖4是空載0時(shí)給定轉(zhuǎn)速300 r/min和0.5 s時(shí)給定轉(zhuǎn)速1 000 r/min,固定增益的STA-SMO轉(zhuǎn)速估計(jì)誤差,由圖中可以看出低速300 r/min時(shí)因?yàn)檩^大增益值的存在,估計(jì)誤差最大可達(dá)1.5 r/min。
由圖5變?cè)鲆鍿TA-SMO轉(zhuǎn)速估計(jì)誤差和圖4對(duì)比得,低速300 r/min時(shí)最大估計(jì)誤差僅有0.15 r/min,明顯提高低速時(shí)估計(jì)精度。
由圖6固定增益和圖7變?cè)鲆鍿TA-SMO轉(zhuǎn)子估計(jì)誤差可知,兩者都有較高的轉(zhuǎn)子位置估計(jì)精度,最大誤差僅有0.28 rad,但低速時(shí)變?cè)鲆鍿TA-SMO轉(zhuǎn)子位置估計(jì)精度更高。因?yàn)樽冊(cè)鲆鍿TA-SMO中σ1、σ2的值是在估計(jì)轉(zhuǎn)速1 000 r/min時(shí)計(jì)算出的,所以當(dāng)給定轉(zhuǎn)速是1 000 r/min時(shí),固定增益和變?cè)鲆娴膋1、k2值相等,可保證高速時(shí)STA-SMO是穩(wěn)定的。
圖8和圖9是變?cè)鲆娴膋1和k2的波形圖。
由圖8和圖9中變?cè)鲆嬷捣糯蟛糠挚芍S估計(jì)轉(zhuǎn)速的增加,滑模增益逐漸增大,從而減小電機(jī)在低速時(shí)過(guò)大的滑模增益值造成抖振的現(xiàn)象,同時(shí)高速時(shí)足夠大的滑模增益值可以保證STA-SMO的穩(wěn)定性。
圖10和圖11是變?cè)鲆鍿TA-SMO估計(jì)的轉(zhuǎn)速和轉(zhuǎn)子位置同實(shí)際的轉(zhuǎn)速和轉(zhuǎn)子位置對(duì)比圖。
由圖10放大部分可知,在極短的時(shí)間內(nèi)變?cè)鲆娴腟TA-SMO可實(shí)現(xiàn)對(duì)實(shí)際轉(zhuǎn)速的準(zhǔn)確估計(jì)。而且,由圖4的轉(zhuǎn)速估計(jì)誤差可看出,在給定轉(zhuǎn)速300 r/min時(shí),最大估計(jì)誤差有15 r/min。在0.5 s,給定轉(zhuǎn)速是1 000 r/min時(shí),轉(zhuǎn)速估計(jì)誤差僅有5 r/min。同樣,由圖11可得出,在整個(gè)1 s仿真時(shí)間內(nèi),變?cè)鲆鍿TA-SMO能夠始終保持對(duì)轉(zhuǎn)子位置的精確估計(jì)。
為進(jìn)一步驗(yàn)證突加減負(fù)載時(shí)變?cè)鲆鍿TA-SMO轉(zhuǎn)速和轉(zhuǎn)子位置估計(jì)精度,在0和0.5 s給定轉(zhuǎn)速分別是300 r/min和1 000 r/min的基礎(chǔ)上,0.2 s時(shí)和0.6 s時(shí)分別加載4 N·m和卸載。
由圖12可知,在突加減載時(shí),轉(zhuǎn)速估計(jì)誤差僅有最大0.6 r/min的變化,而且在極短的時(shí)間內(nèi)即可恢復(fù)。同樣,由圖13可得,加減負(fù)載對(duì)轉(zhuǎn)子位置估計(jì)精度影響較小,證明所提出的變?cè)鲆鍿TA-SMO具有一定的魯棒性。
由圖14可知,當(dāng)0.2 s突加負(fù)載時(shí),估計(jì)轉(zhuǎn)速和實(shí)際轉(zhuǎn)速下降12 r/min,且在0.3 s內(nèi)未能恢復(fù)到給定轉(zhuǎn)速。同樣在0.6 s突減負(fù)載時(shí),轉(zhuǎn)速上升9 r/min且恢復(fù)時(shí)間較長(zhǎng)。由以上仿真結(jié)果可知,變?cè)鲆娴腟TA-SMO在加減負(fù)載時(shí)依舊能夠保持對(duì)轉(zhuǎn)速和轉(zhuǎn)子位置的精確估計(jì),但是PI轉(zhuǎn)速控制器存在魯棒性差和動(dòng)態(tài)響應(yīng)慢的問(wèn)題。
圖15是采用新型負(fù)載轉(zhuǎn)矩觀測(cè)器估計(jì)轉(zhuǎn)矩值和實(shí)際轉(zhuǎn)矩值的對(duì)比圖。

圖16是采用改進(jìn)滑模轉(zhuǎn)速控制器的無(wú)位置系統(tǒng)中估計(jì)轉(zhuǎn)速和實(shí)際轉(zhuǎn)速的對(duì)比圖。
由圖16和圖14相比可知,基于新型轉(zhuǎn)矩觀測(cè)器和新型趨近律的滑模轉(zhuǎn)速控制器在0.2 s突加負(fù)載時(shí),轉(zhuǎn)速只有不到3 r/min的下降而且恢復(fù)時(shí)間只有3 ms。在0.6 s突減負(fù)載時(shí),轉(zhuǎn)速雖較低速時(shí)波動(dòng)更大,但依舊能夠迅速達(dá)到給定轉(zhuǎn)速,而且在整個(gè)過(guò)程中估計(jì)轉(zhuǎn)速始終保持對(duì)實(shí)際轉(zhuǎn)速的精確估計(jì),證明所提出的變?cè)鲆娴腟TA-SMO和新型趨近律的滑模控制器的理論正確性。
4.2 改進(jìn)滑模無(wú)位置傳感器控制系統(tǒng)實(shí)驗(yàn)驗(yàn)證
搭建如圖17所示的基于DSP28335的實(shí)驗(yàn)平臺(tái),驗(yàn)證改進(jìn)滑模無(wú)位置傳感器控制系統(tǒng)的正確性。為驗(yàn)證低速時(shí)所提方法的可靠性,給定轉(zhuǎn)速是400 r/min,在3 s時(shí)突加4 N·m的負(fù)載。圖18是基于以上實(shí)驗(yàn)條件下實(shí)際轉(zhuǎn)矩和估計(jì)轉(zhuǎn)矩波形圖,圖19和圖20分別是轉(zhuǎn)速估計(jì)誤差和轉(zhuǎn)子位置估計(jì)誤差,圖21是估計(jì)轉(zhuǎn)速波形圖。
圖18表明當(dāng)3 s突加負(fù)載時(shí),新型轉(zhuǎn)矩觀測(cè)器可以在1 s時(shí)間內(nèi)實(shí)現(xiàn)對(duì)負(fù)載轉(zhuǎn)矩的觀測(cè),而且具有較高的觀測(cè)器精度,證明所提新型轉(zhuǎn)矩觀測(cè)器理論是有效的。
由圖19和圖20變?cè)鲆鍿TA-SMO轉(zhuǎn)速估計(jì)誤差和轉(zhuǎn)子位置誤差可知,當(dāng)在低速穩(wěn)定運(yùn)行時(shí),估計(jì)誤差不到1 r/min,轉(zhuǎn)子位置誤差保持在0.2 rad,證明變?cè)鲆娴腟TA-SMO具有較高的估計(jì)精度。
由圖21可得,在0.6 s時(shí)估計(jì)轉(zhuǎn)速達(dá)到給定轉(zhuǎn)速,超調(diào)較小。當(dāng)3 s突加負(fù)載時(shí),估計(jì)轉(zhuǎn)速雖具有一定程度的下降,但很快可以達(dá)到給定轉(zhuǎn)速并保持穩(wěn)定運(yùn)行,證明基于新型轉(zhuǎn)矩觀測(cè)器和新型趨近律的滑模轉(zhuǎn)速控制器動(dòng)態(tài)響應(yīng)快,具有強(qiáng)魯棒性。由以上的實(shí)驗(yàn)結(jié)果可知,本文所提出的改進(jìn)滑模無(wú)位置傳感器控制系統(tǒng)具有可行性。
5 結(jié) 論
針對(duì)固定滑模增益STA-SMO低速時(shí)轉(zhuǎn)速估計(jì)精度低和基于STA-SMO的無(wú)位置傳感器控制系統(tǒng)中PI轉(zhuǎn)速控制器魯棒性差的問(wèn)題,本文提出一種改進(jìn)滑模無(wú)位置傳感器控制方法。通過(guò)仿真和實(shí)驗(yàn)得出以下結(jié)論:
1)相較固定增益的STA-SMO,增益值隨轉(zhuǎn)速變化的變?cè)鲆鍿TA-SMO可以減小低速時(shí)轉(zhuǎn)速和轉(zhuǎn)子位置估計(jì)誤差,同時(shí)保證高速時(shí)觀測(cè)器的穩(wěn)定性。
2)基于新型轉(zhuǎn)矩觀測(cè)器和新型趨近律設(shè)計(jì)的滑模轉(zhuǎn)速控制器在加減負(fù)載時(shí),相較PI轉(zhuǎn)速控制具有更快的動(dòng)態(tài)響應(yīng)和更強(qiáng)的魯棒性,而且在基于變?cè)鲆鍿TA-SMO估計(jì)出的機(jī)械角速度下,新型轉(zhuǎn)矩觀測(cè)器可以實(shí)現(xiàn)對(duì)負(fù)載轉(zhuǎn)矩的精確估計(jì),從而保證新型滑模控制器具有更高的控制精度。
3)提出的改進(jìn)滑模無(wú)位置傳感器控制方法,不僅可以提高轉(zhuǎn)速和轉(zhuǎn)子位置的估計(jì)精度,還可以突加減負(fù)載時(shí)保持對(duì)給定轉(zhuǎn)速的準(zhǔn)確跟蹤,從而實(shí)現(xiàn)高精度控制。