力矩輸出能力最優(yōu)化混合執(zhí)行機(jī)構(gòu)操縱律設(shè)計(jì)
2022-11-21 06:01:34倪瑞華冰張宏吳云華陳志明
中國空間科學(xué)技術(shù) 2022年5期
倪瑞,華冰,張宏,吳云華,陳志明
南京航空航天大學(xué) 航天學(xué)院,南京 211000
1 引言
航天器的敏捷機(jī)動(dòng)控制與姿態(tài)動(dòng)態(tài)跟蹤控制,都需要執(zhí)行機(jī)構(gòu)輸出大力矩以及具有較高的精確度[1]。執(zhí)行機(jī)構(gòu)有控制力矩陀螺[2-3],飛輪[4],磁力矩[5]等,單類的執(zhí)行機(jī)構(gòu)各有其局限性,傳統(tǒng)的推力器精度低,CMG具有奇異問題[6],RW具有飽和問題[7]等。因此,對于航天器的敏捷姿態(tài)控制,一般選用混合執(zhí)行機(jī)構(gòu)[8],其中,CMG輸出力矩線性度高,能夠成倍的放大力矩而且響應(yīng)迅速,但會(huì)有奇異的問題,RW雖然提供力矩較小,但控制精度高,可以和CMG協(xié)同使用,利用CMG對RW進(jìn)行卸載,并利用RW使CMG逃離幾何奇異。所以CMG和RW的混合執(zhí)行機(jī)構(gòu)由于其精度高、輸出力矩大成為較好的選擇[9]。
2013年,耿云海等提出了一種形式簡潔的混合執(zhí)行機(jī)構(gòu)力矩分配算法[10],避免了CMG奇異,避免了RW飽和和過零的問題,提高了精度。2015年,王煥杰等在CMG的基礎(chǔ)上設(shè)計(jì)了RW的操縱律進(jìn)行閉環(huán)修正,可以實(shí)現(xiàn)CMG在非奇異的狀態(tài)下減小外界干擾等不利影響實(shí)現(xiàn)對大角度姿態(tài)機(jī)動(dòng)的控制[11]。2017年,Yunhua Wu等提出了CMG和RW的新的性能指標(biāo),使用具有可行的零運(yùn)動(dòng)矢量梯度方法,使混合執(zhí)行器系統(tǒng)達(dá)到可行狀態(tài),但并沒有實(shí)現(xiàn)混合執(zhí)行機(jī)構(gòu)的性能最優(yōu)化[12]。2019年,Yunhua Wu等提出了基于合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律[13],實(shí)現(xiàn)CMG角速度和RW角加速度的最小化,使得CMG和RW協(xié)同使用,并且使得能耗較小,但沒有精確的衡量力矩輸出的能力,2019年,張智飛等提出了CMG 系統(tǒng)零運(yùn)動(dòng)混合執(zhí)行機(jī)構(gòu)力矩分配方法[14],采用高斯偽譜法進(jìn)行了最優(yōu)力矩分配,不僅避免了CMG奇異,而且縮短了敏捷衛(wèi)星快速機(jī)動(dòng)的時(shí)間。2020年,張科備等創(chuàng)新性的提出在構(gòu)型上進(jìn)行變化,使系統(tǒng)增加自由度[15]。以上方法或側(cè)重于逃離奇異,而引入較大的力矩誤差,或側(cè)重于降低能耗,沒有考慮在逃離奇異的前提下,力矩輸出能力的最優(yōu)化。
本文從幾何角度出發(fā),根據(jù)期望力矩與系統(tǒng)輸出力矩的幾何關(guān)系進(jìn)行分析,使得期望力矩與輸出力矩夾角最小。給出了力矩輸出能力最優(yōu)的CMG框架角速度和RW角加速度計(jì)算方法,設(shè)計(jì)了力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律,引入?yún)?shù),使得CMG框架角和RW角加速度與期望力矩下的CMG框架角和RW角加速度的誤差以及輸出力矩誤差的混合二次型最小,在避免CMG奇異和RW飽和的前提下,實(shí)現(xiàn)力矩輸出能力強(qiáng),精度高,可更好的完成航天器敏捷機(jī)動(dòng)控制等任務(wù)。
2 混合執(zhí)行機(jī)構(gòu)的配置
2.1 金字塔構(gòu)型的CMG和RW混合執(zhí)行機(jī)構(gòu)
混合執(zhí)行機(jī)構(gòu)采用金字塔構(gòu)型,使用4個(gè)CMG和3個(gè)RW構(gòu)成。4個(gè)CMG框架軸分別垂直于正四棱錐的4個(gè)側(cè)面,與塔頂軸夾角均為β,初始角動(dòng)量均沿正四棱錐的底邊以逆時(shí)針順序排列。3個(gè)RW正交分布。如圖1所示。

圖1 金字塔構(gòu)型CMG和RW系統(tǒng)[16]Fig.1 Pyramidal CMG and RW system
CMG的框架角集合α=[α1,α2,α3,α4]T,傾角為β,CMG角動(dòng)量hCMG為:
hCMG=
(1)
式中:c(β)≡cos (β) ,s(β)≡sin (β),s(αi)≡sin (αi),c(αi)≡cos (αi),式(1)導(dǎo)數(shù)為:
式中:JCMG為CMG的雅克比矩陣;h0是標(biāo)稱角動(dòng)量。

量的導(dǎo)數(shù)為:
混合執(zhí)行機(jī)構(gòu)的角動(dòng)量導(dǎo)數(shù)為:


2.2 CMG奇異與RW飽和
CMG系統(tǒng)陷入奇異狀態(tài)是指當(dāng)CMG系統(tǒng)處于特定的框架角時(shí),各個(gè)CMG輸出的力矩共面,此時(shí)的CMG系統(tǒng)無法輸出正交于該平面的力矩,該平面的法向量為奇異矢量,對應(yīng)的 CMG 框架角為奇異框架角[17]。從數(shù)學(xué)推導(dǎo)的方面看,當(dāng)CMG陷入奇異時(shí),雅克比矩陣JCMG列向量不共面且互相平行,即不滿秩:
采用CMG奇異度量函數(shù)SCMG來衡量CMG接近奇異的情況,SCMG越大,CMGs越遠(yuǎn)離奇異,當(dāng)SCMG為0時(shí),CMGs陷入奇異:

RW產(chǎn)生的力矩與加速度成比例,即RW的動(dòng)量矩在某個(gè)方向上不斷增大,直到飛輪轉(zhuǎn)速達(dá)到極限值,這就意味著RW會(huì)陷入飽和,從而失去控制航天器姿態(tài)的能力,RW需要由其他輔助設(shè)備(例如推進(jìn)器、磁力矩器等)進(jìn)行卸載去飽和[18]。
類似于CMG的奇異度量函數(shù),采用RW飽和指標(biāo)SRW來衡量RW飽和情況,當(dāng)SRW=1時(shí),RW陷入飽和:
式中:Ωmax為飽和值。
CMG與RW互相耦合,當(dāng)CMG奇異時(shí),RW輸出扭矩,使得混合執(zhí)行機(jī)構(gòu)逃離奇異。當(dāng)CMG 奇異時(shí),雖然rank(JCMG)=2,但混合執(zhí)行機(jī)構(gòu):
所以,混合執(zhí)行機(jī)構(gòu)可以彌補(bǔ)單CMG作為執(zhí)行機(jī)構(gòu)容易陷入奇異的情況。
為體現(xiàn)力矩輸出的精度,定義了力矩輸出能力的性能指標(biāo)[19]:
式中:θi為第i個(gè)CMG輸出力矩τdi與期望力矩Tc之間的夾角,S越大輸出能力越強(qiáng),S=0表示無法輸出期望力矩。
3 力矩輸出最優(yōu)化原理
根據(jù)期望力矩矢量及CMG力矩輸出的幾何關(guān)系,來使得輸出力矩與期望力矩之間的夾角最小,實(shí)現(xiàn)力矩輸出能力最優(yōu)。所以,本文從幾何角度出發(fā),合理分配各個(gè)CMG的框架角,設(shè)計(jì)了力矩輸出最優(yōu)化原理,使得力矩輸出能力最強(qiáng),最優(yōu)化框架角速度的設(shè)定如圖2所示[19]。

圖2 最優(yōu)化框架角速度的設(shè)定[19]Fig.2 Setting of optimal frame angular velocity

sgn(〈hi×hdi,hi〉)
為使得輸出能力最優(yōu),經(jīng)過一個(gè)控制周期Δt之后,當(dāng)前框架角應(yīng)與期望的框架角重合,則期望的框架角速度為:
則各個(gè)CMG的期望框架角速度為:
由于RW可以提供各個(gè)方向的力矩,為使得CMG和RW互相耦合,則使得RW的期望的角加速度如下:

使得CMG和RW協(xié)同使用,RW的角速度受到CMG的控制,當(dāng)CMG出現(xiàn)奇異情況時(shí)候,RW起作用,給予小力矩使得CMG更容易逃離奇異狀態(tài),使整個(gè)系統(tǒng)迅速逃離奇異,能繼續(xù)執(zhí)行任務(wù)[12]。
4 執(zhí)行機(jī)構(gòu)的操縱律設(shè)計(jì)
基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律在精準(zhǔn)的輸出期望力矩的同時(shí)保證力矩輸出能力最大。本文給出力矩期望最優(yōu)的CMG框架角與RW角加速度,引入混合最小二次型,使得CMG框架角和RW角加速度與期望力矩下的CMG框架角和RW角加速度的誤差以及輸出力矩誤差的混合二次型最小,即保證角速度誤差與力矩輸出誤差同時(shí)最小,引入了參數(shù),使得操縱律一直存在力矩誤差,并通過減小參數(shù),一定程度上降低在奇異面產(chǎn)生的力矩誤差。
其中,混合最小二次型L[19]:
(2)

其中L取最小值且矩陣A,B取為單位對稱矩陣。
(3)
取B=E3,A=λE7。其中Ei(i=3,7)為單位矩陣,λ為減小力矩誤差的參數(shù),代入(3)得到:
(4)
根據(jù)Woodbury公式,變換(4)為[10]:
式中:λ=λ0exp(μSCMG)。
5 力矩誤差與奇異性分析
5.1 力矩誤差分析
得到矩陣為:

式中:B=E3,A=λE7。
混合執(zhí)行機(jī)構(gòu)的期望力矩為:
輸出力矩誤差為:
式中:A+DTBD=λE7+DTD由于λ≠0,所以不可逆,則輸出力矩誤差不為0,使得操縱律總是存在一定的力矩誤差。降低λ的取值,減小力矩誤差。取λ=λ0exp(μSCMG),當(dāng)在CMG奇異點(diǎn)附近,SCMG→0,det(DTD)→0,λ迅速減小,ΔT→0。 同時(shí),λ≠0將使得操縱律總是存在一定的力矩誤差,降低λ的取值,減小力矩誤差。
對于λ=λ0exp(μSCMG),取當(dāng)SCMG=0.04時(shí),針對λ0的值進(jìn)行討論,如圖3為誤差參數(shù)對三軸力矩誤差的絕對值和的影響,當(dāng)λ0減小,即為λ的減小,可以顯著減小系統(tǒng)的力矩誤差和,但是,當(dāng)λ0小于1×10-3后,減小效果不顯著。

圖3 參數(shù)λ對力矩誤差和影響Fig.3 Effect of parameter λ on sum of torque error

如表1為,考慮λ0對框架角速度誤差和的影響。
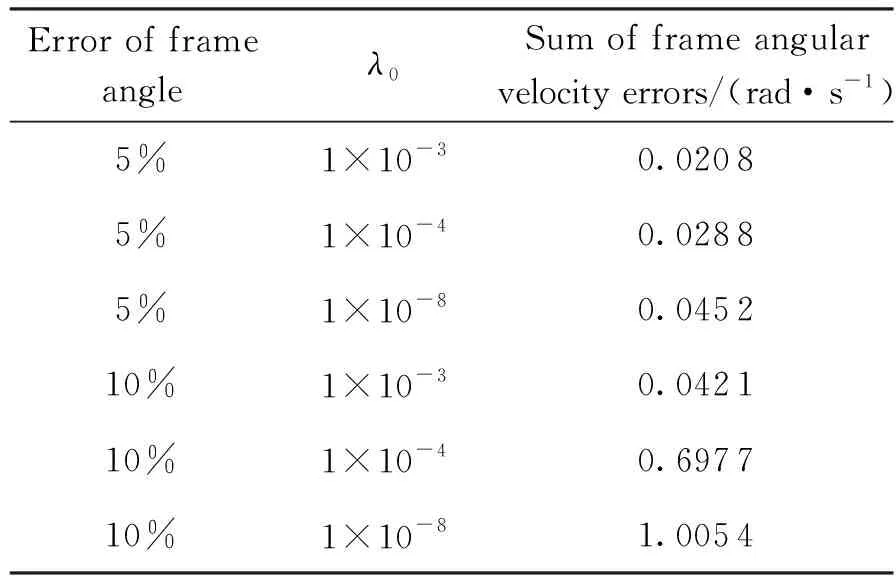
表1 參數(shù)λ0對框架角速度誤差影響
可見,框架角誤差越大,框架角速度誤差和越大,而λ0→0,框架角速度誤差和變化越大,即系統(tǒng)對框架角的誤差的處理能力越來越差。
所以針對上述情況,取λ0=0.000 1,在減小力矩誤差的同時(shí)誤差處理能力也較好。
5.2 CMG奇異性分析
對基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律中CMG奇異逃離進(jìn)行證明,并分析混合執(zhí)行機(jī)構(gòu)與單CMG系統(tǒng)的不同。證明基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律逃離CMG的奇異效果更好。


(5)


代入(5)可得:
可得:
CMG奇異情況可以分為以下三種情況:
Case1:雅可比矩陣第一行為0,c(α1,k)=s(α2,k)=c(α3,k)=s(α4,k)=0,
Case2:雅可比矩陣第二行為0,s(α1,k)=c(α2,k)=s(α3,k)=c(α4,k)=0,
Case3:雅可比矩陣第三行為0,c(α1,k)=c(α2,k)=c(α3,k)=c(α4,k)=0,
當(dāng)沒有RW時(shí),
(6)
令B=

代入(6)得:
則可得:
(7)

6 仿真結(jié)果與分析
6.1 混合執(zhí)行機(jī)構(gòu)仿真參數(shù)設(shè)置
在本節(jié)中,對基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律進(jìn)行仿真分析,混合執(zhí)行機(jī)構(gòu)的參數(shù)設(shè)定如表2所示。
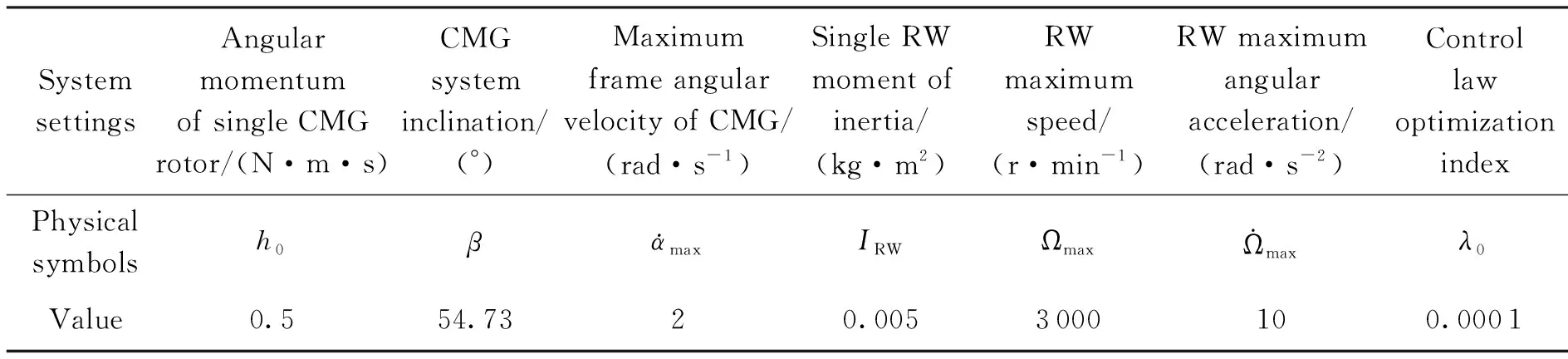
表2 混合執(zhí)行機(jī)構(gòu)參數(shù)
本節(jié)考慮4個(gè)方案,如表3所示。其中方案1和2采用混合執(zhí)行機(jī)構(gòu)的最優(yōu)化操縱律,但分別采用不同的期望力矩作為對比,分別為低動(dòng)態(tài)性的期望力矩以及高動(dòng)態(tài)性的期望力矩。方案3是當(dāng)混合執(zhí)行機(jī)構(gòu)一開始便陷入奇異的極限狀態(tài),基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律逃離奇異的能力。方案4為基于合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律[4],考慮與方案3同樣的極限狀態(tài)下,逃離奇異情況,作為與方案3的對比方案。

表3 仿真方案設(shè)計(jì)
6.2 仿真分析

圖4 方案1仿真結(jié)果Fig.4 Simulation results of scenario 1

圖5 方案2仿真結(jié)果Fig.5 Simulation results of scenario 2
如圖6,為系統(tǒng)初始框架角雙曲線奇異情況,可見,圖6(a),CMG奇異性指標(biāo)在0s為0,即初始奇異,但隨著時(shí)間流逝,立刻逃離奇異,且不會(huì)再陷入奇異狀態(tài),RW飽和指標(biāo)未達(dá)到1,即RW不飽和,同時(shí)(c)可見,力矩誤差較小,輸出力矩接近于期望力矩,(d)可見,混合執(zhí)行機(jī)構(gòu)力矩輸出能力較強(qiáng)。

圖6 方案3仿真結(jié)果Fig.6 Simulation results of scenario 3
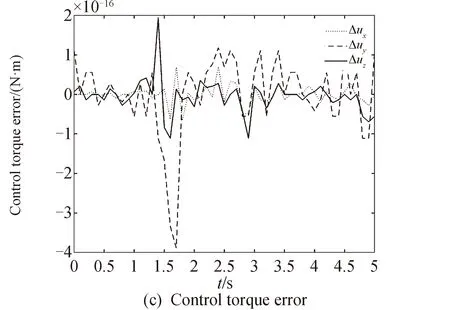
續(xù)圖6Fig.6 Continued
如圖7,為基于合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律下系統(tǒng)初始框架角雙曲線奇異情況,圖7(a),CMG奇異性指標(biāo)在0 s為0,即初始奇異,但隨著時(shí)間流逝,立刻逃離奇異,圖7(b)RW飽和指標(biāo)未達(dá)到1,即RW不飽和,圖7(c)可見,力矩誤差較小,與圖6類似,但從圖6(d)和圖7(d)對比可以看出合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律的S較小,所以針對力矩輸出能力而言,合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律力矩輸出能力較差。

圖7 方案4仿真結(jié)果Fig.7 Simulation results of scenario 4
根據(jù)表4,得到以下結(jié)論:
1)對于混合執(zhí)行機(jī)構(gòu),當(dāng)初始CMG不奇異時(shí),由于期望力矩會(huì)導(dǎo)致CMG接近奇異狀態(tài),基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律使得系統(tǒng)很快逃離奇異,且輸出力矩誤差較小,力矩輸出能力強(qiáng);
2)對于混合執(zhí)行機(jī)構(gòu),當(dāng)初始CMG陷入奇異時(shí),對于這種極限狀態(tài),例如雙曲線奇異,基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律可使系統(tǒng)迅速逃離奇異,并在下次接近奇異的時(shí)候使系統(tǒng)遠(yuǎn)離奇異,且輸出力矩誤差較小,力矩輸出能力強(qiáng);
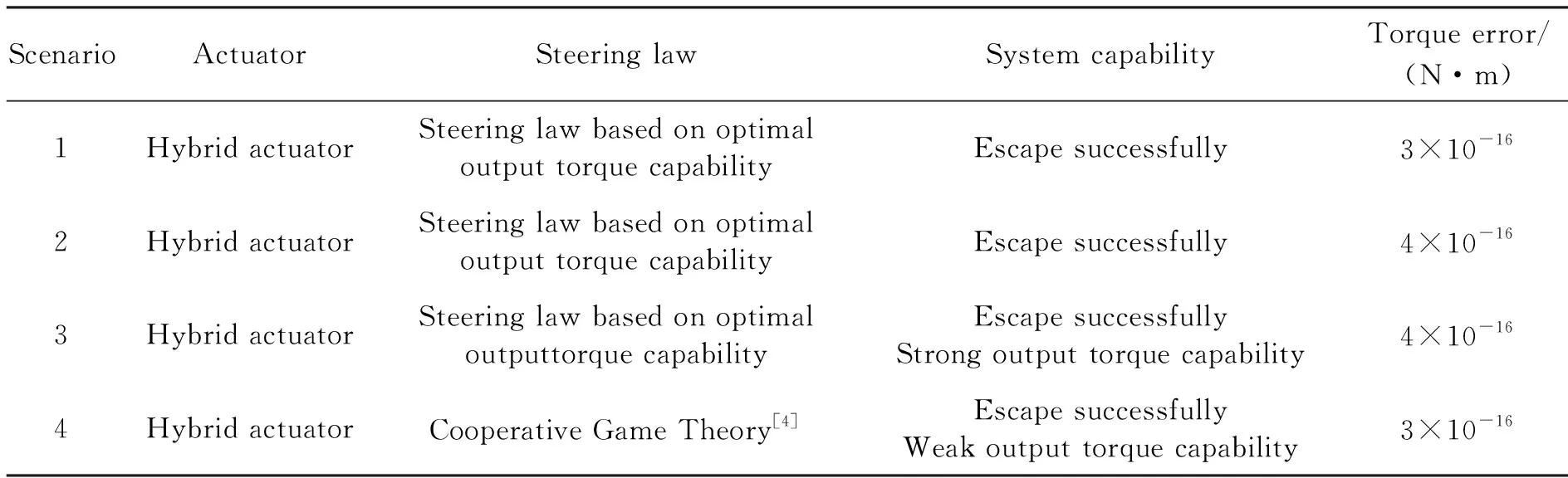
表4 仿真效果分析
3)與現(xiàn)有的逃離奇異效果較好的,基于合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律的輸出能力進(jìn)行對比,可見,力矩輸出能力最優(yōu)化混合執(zhí)行機(jī)構(gòu)操縱律的力矩輸出能力較強(qiáng)。
7 結(jié)論
本文采用CMG和RW的混合執(zhí)行機(jī)構(gòu),設(shè)計(jì)了基于力矩輸出能力最優(yōu)化混合執(zhí)行機(jī)構(gòu)操縱律,引入了λ參數(shù),使得操縱律一直存在力矩誤差,通過對λ參數(shù)對力矩誤差和的影響和λ參數(shù)對框架角的誤差的處理能力的影響,選取了最優(yōu)情況下的λ參數(shù),使之在一定程度上降低系統(tǒng)奇異面上產(chǎn)生的力矩誤差。證明了基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律中CMG奇異逃離較好,并分析了基于力矩輸出能力最優(yōu)化混合執(zhí)行機(jī)構(gòu)操縱律比基于合作博弈的混合執(zhí)行機(jī)構(gòu)操縱律輸出力矩能力更強(qiáng)。經(jīng)過仿真驗(yàn)證,基于力矩輸出能力最優(yōu)化的混合執(zhí)行機(jī)構(gòu)操縱律的CMG逃離奇異能力較好,并且RW不會(huì)陷入飽和,只會(huì)引入很小的力矩誤差,力矩輸出誤差小,并且力矩輸出能力強(qiáng)。適用于航天器的高動(dòng)態(tài)敏捷機(jī)動(dòng)或者姿態(tài)動(dòng)態(tài)跟蹤控制等任務(wù)。
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
動(dòng)漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
人大建設(shè)(2018年6期)2018-08-16 07:23:10
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45