基于MATLAB的行走機構設計與優(yōu)化
2022-11-23 05:29:04任軍輝穆龍濤
河南科技 2022年20期
關鍵詞:分析
任軍輝 穆龍濤 權 超
(陜西工業(yè)職業(yè)技術學院,陜西 咸陽 712000)
0 引言
移動機器人是現(xiàn)代機器人的一個重要分支,行走機構是其能夠實現(xiàn)移動的結構保障。在所有行走機構中,連桿機構因結構簡單、低副能承受較大的載荷、具有豐富的運動軌跡,能很好地實現(xiàn)移動機器人行走步態(tài)的要求[1]。平面鉸鏈四桿機構是最簡單,也是應用最廣泛的連桿機構,可將其看作一個Ⅱ級桿組連接到原動件和機架上。只要在平面四桿機構上施加一個原動機就可實現(xiàn)復雜的平面運動軌跡[2]。在實際應用中,對行走機構的要求不同,可在四桿機構的基礎上增加桿組,從而設計出較為復雜的多連桿系統(tǒng)[3],圖1為六桿機械腿結構示意圖。

圖1 六桿機械腿結構拆分
對連桿機構進行設計的方法有作圖法和解析法[4]。作圖法是按照一定的比例尺,用幾何作圖的方式來求解連桿機構的尺寸參數(shù),該方法較為簡單直觀、高效,但求解精度不高,對較為復雜的連桿系統(tǒng)求解較為困難;解析法是通過建立機構運動要求和機構尺寸參數(shù)間的解析方程式,并根據(jù)已知條件來求解出連桿的尺寸參數(shù),且求解精度高。隨著計算機技術的發(fā)展,解析法的求解更加方便。MATLAB提供了強大的數(shù)學計算能力,將研究的平面機構放于笛卡爾坐標系中,利用坐標矢量關系來建立求解表達式,即可實現(xiàn)對連桿機構的精確求解與優(yōu)化[5-7]。
1 行走機構方案
一種基于連桿機構的四足機器人行走機構如圖2所示,左右兩側的行走結構完全一致,但在運動狀態(tài)上存在180°的相位差,可實現(xiàn)交替配合。每一側機構中,前肢和后肢結構都是相似的平面四桿機構,通過曲柄共用一個電機。因此,在對其進行分析時,選取一側的前肢結構對其進行分析與優(yōu)化,其機構運動簡圖如圖3所示。

圖2 四足行走機構

圖3 機構運動簡圖
各桿件的尺寸為AB=200 mm、BC=700 mm、CD=700 mm、AD=1 000 mm。平面四桿機構曲柄存在的條件見式(1)。

式中:LAB為AB桿件的長度;LAD為AD桿件的長度;LBC為BC桿件的長度;LCD為CD桿件的長度。由圖3可知,最短桿AB為曲柄,該四桿機構屬曲柄搖桿機構。運動過程如下:AB桿件為原動件,電機通過減速裝置來帶動曲柄作整周轉動,連桿為執(zhí)行構件,P點為末端點,連桿上的某位置作高低起伏的復雜軌跡運動,從而實現(xiàn)與地面接觸及抬起前進的行走動作。
2 機構運動和力分析
2.1 機構數(shù)學模型建立
為了能利用矢量來表示機構的幾何關系,將四桿機構放置于平面直角坐標系中進行研究,如圖4所示。四桿機構的四條邊可構成一個封閉的圖形,用矢量來表示每一段,即在封閉圖形ABCD中,存在的矢量方程見式(2)。

式中:AB為桿AB對應的平面矢量;BC為桿BC對應的平面矢量;AD為桿AD對應的平面矢量;DC為桿DC對應的平面矢量。
為了便于求解導數(shù),式(2)可用復數(shù)的形式來表示,見式(3)。

式中:|AB|、BC、|CD|、|AD|分別為AB桿、BC桿、CD桿和AD桿的長度;θ1,θ2,θ3分別為AB桿、BC桿、CD桿與水平方向的夾角(見圖4)。

圖4 行走機構的數(shù)學模型
其中,θ1隨時間的變化規(guī)律就是曲柄的運動規(guī)律,待分析的變量包括其余桿件的角度,可利用MATLAB來求解式(3),以及角度相對時間求一階導、二階導,從而分析各桿件的位置、速度和加速度。
2.2 運動分析
在已知曲柄AB為主動件勻速轉動的前提下,分析其余桿件的位置、速度和加速度的變化情況。由于平面四桿機構的自由度為1,在只有一個原動件的前提下,機構具有確定的運動。P點為連桿BC延長線上的一點,根據(jù)BC桿的運動規(guī)律可求出P點的運動情況。
對式(3)兩側同時求時間的一階導數(shù),見式(4)。

式中:ω1、ω2和ω3分別為AB桿、BC桿和CD桿的角速度。
為了便于MATLAB的編程求解,用矩陣的形式來表示速度方程,見式(5)。
對式(3)兩側同時求時間的二階導數(shù),或對式(4)兩側同時求時間的一階導數(shù),得到加速度的方程式,見式(6)。

式中:α2、α3分別為桿BC、桿CD的角加速度。
根據(jù)計算結果,連桿和搖桿的運動規(guī)律如圖5所示。
由圖5可知,當曲柄轉角分別為135°和330°時,CD桿的角速度達到最大值75 rad/s;當曲柄轉角在27°和240°附近時,連桿BC達到最大角速度75 rad/s。在每一個運動周期中,連桿BC和搖桿CD的加速度波動范圍分別為-2.2×104~1.4×104rad/s2、-1.5×104~2.2×104rad/s2。

圖5 行走機構運動分析曲線
2.3 力分析
在運動分析的基礎上,當桿件質量、質心位置、轉動慣量以及執(zhí)行件的工作阻力矩已知,可借助MATLAB軟件來計算運動副上的受力,以及原動機所需的平衡力矩。對活動構件i進行受力分析,并根據(jù)受力分析來建立平衡方程,見式(7)。

式中:Si為質心;MSi為對質心Si的力矩;Fx為水平方向的作用力;Fy為垂直方向的作用力。
在行走機構中,對3個可移動的桿件可建立9個平衡方程,利用MATLAB進行求解,對工作阻力矩為100 N、桿件線密度為10 kg/m的案例進行分析,得到四桿機構C點轉動副的受力和曲柄AB平衡力矩,如圖6所示。
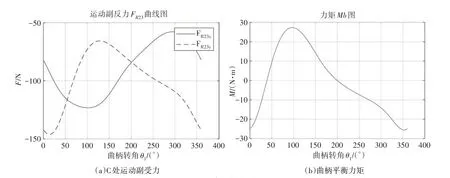
圖6 行走機構力分析
3 行走機構優(yōu)化設計
通過以上分析可以看出,連桿上的點的運動軌跡不盡相同,在圖3中,行走機構末端執(zhí)行點是連桿BC延長線上的一點,為了使行走機構具有良好的傳力性能和越障能力,希望P點的運動軌跡能通過(1 200,-920)、(1 100,-900)、(900,-880)、(800,-910)、(700,-930)這5個點,以這5個點所在的曲線為理想曲線,根據(jù)數(shù)學模型可求解出軌跡上最接近理想曲線的連桿上某點位置,并將其作為P點的實際位置,從而實現(xiàn)對連桿機構的優(yōu)化。目標函數(shù)見式(8)。

式中:(xPi,yPi)、(xi,yi)分別為理想曲線上的坐標點和P點軌跡上的坐標點。
由于P是實際構件上的一點,因此可以是BC線段外的點,但其與連桿是同一個構件。可用BP以及BP和BC之間的夾角θ來表示P點在實際連桿上的位置。優(yōu)化的約束條件見式(9)。

式中:γ為傳動角;γmin和γmax分別為傳動角的最小值和最大值;|AB|、|BC|、|CD|、|AD|分別為AB桿、BC桿、CD桿和AD桿的長度。
由此來設計各桿長度以及P點在連桿上的位置。根據(jù)MATLAB的計算結果在三維建模軟件中進行建模,如圖7所示,即BP=633 mm、θ=13.4°。

圖7 優(yōu)化后的結構即軌跡線
4 結語
本研究基于MATLAB的編程與強大計算能力,使用解析法對連桿行走機構進行運動和受力分析,并在此基礎上,以末端軌跡為目標,對連桿進行優(yōu)化,得出末端執(zhí)行點的具體位置,使連桿行走機構具有良好的傳力和越障性能,從而為精確分析和連桿機構設計提供參考。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
