基于數(shù)字控制的穩(wěn)定伺服平臺失穩(wěn)故障分析及啟示
2022-11-23 10:09:46劉云峰尹彥東何凡甘春泉
機床與液壓 2022年20期
劉云峰,尹彥東,何凡,甘春泉
(1.火箭軍裝備部駐成都地區(qū)第四軍事代表室,四川成都 610036;2.中國兵器工業(yè)第209研究所,四川成都 610041)
0 前言
某光電跟蹤系統(tǒng)的穩(wěn)定伺服平臺在電磁環(huán)境較為復雜的廠房中進行系統(tǒng)試驗時,出現(xiàn)了失穩(wěn)現(xiàn)象:在對目標穩(wěn)定跟蹤一段時間后,穩(wěn)定平臺意外向下方偏左慢速運動,然后轉(zhuǎn)而向上方偏右運動,最終令目標偏出光電跟蹤系統(tǒng)的視場,導致跟蹤失敗。本文作者針對該失穩(wěn)現(xiàn)象,介紹了某光電跟蹤系統(tǒng)穩(wěn)定伺服平臺工作原理,并對平臺失穩(wěn)故障原因及機制進行了分析,將故障定位為伺服控制軟件設(shè)計缺陷,最后就軟件設(shè)計工作給出了啟示。
1 穩(wěn)定伺服平臺工作原理
穩(wěn)定伺服平臺作為某光電跟蹤系統(tǒng)的關(guān)鍵部件,其工作狀態(tài)和性能直接影響系統(tǒng)的跟蹤和穩(wěn)定指標[1]。穩(wěn)定伺服平臺主要完成2個功能:(1)根據(jù)跟蹤誤差信號,調(diào)整平臺運動,實現(xiàn)對目標的精確跟蹤;(2)隔離載體的角振動,克服載體姿態(tài)變化對跟蹤系統(tǒng)的影響,保證光電跟蹤系統(tǒng)視軸穩(wěn)定。因此穩(wěn)定伺服平臺必須具有足夠高的跟蹤精度和較好的擾動隔離度。
此穩(wěn)定伺服平臺由伺服控制器與二軸穩(wěn)定平臺負載共同組成,如圖1所示。伺服控制器內(nèi)部包括單片機(型號8051F120)、速率陀螺信號采集電路、正余弦旋轉(zhuǎn)變壓器信號采集電路、通信電路和脈寬調(diào)制輸出驅(qū)動電路等;二軸穩(wěn)定平臺負載由力矩電機、平臺框架、雙軸速率陀螺和旋轉(zhuǎn)變壓器等組成[2-3]。
為了實現(xiàn)目標跟蹤和載體擾動隔離,設(shè)計了方位、俯仰兩通道雙環(huán)控制回路(單通道控制回路框圖如圖2所示)[4-5]。回路外環(huán)為圖像跟蹤回路,使用光電跟蹤系統(tǒng)的圖像視頻跟蹤器測量目標跟蹤失調(diào)角,進行誤差校正后作為回路內(nèi)環(huán)的角速率指令;回路內(nèi)環(huán)為速率穩(wěn)定回路,反饋信號為速率陀螺角速率信號,與角速率指令取差、校正后形成控制量[6],并通過脈寬調(diào)制驅(qū)動電路驅(qū)動二軸穩(wěn)定平臺轉(zhuǎn)動,從而將光電跟蹤系統(tǒng)光軸穩(wěn)定地指向預定目標。
穩(wěn)定伺服平臺控制采用數(shù)字方式實現(xiàn),主要由伺服控制器單片機中的伺服控制軟件完成控制回路的誤差校正、回路閉環(huán)、控制量的脈寬調(diào)制輸出和對外通信等工作[7]。由于對實時性要求較高,伺服控制軟件中采用了單片機的中斷機制來處理脈寬調(diào)制控制量輸出、雙口RAM通信、串口通信及1 ms周期校正算法迭代[8-11]。
2 故障定位
2.1 初步定位
穩(wěn)定伺服平臺失穩(wěn)可能由速率陀螺、旋轉(zhuǎn)變壓器、力矩電機、伺服控制器(軟、硬件)等故障引起[12]。對相應(yīng)硬件進行全面檢查,均不存在異常,可以排除系統(tǒng)硬件故障,故障點集中于伺服控制軟件中。
2.2 伺服控制軟件中斷設(shè)置情況
伺服控制軟件主程序?qū)ο到y(tǒng)初始化后進入循環(huán)執(zhí)行體,而主體工作由4個中斷服務(wù)程序完成,分別為脈寬調(diào)制輸出中斷、雙口RAM通信中斷、串口UART0中斷和1 ms定時中斷,其優(yōu)先級由高至低設(shè)置為:調(diào)制輸出中斷 > 雙口中斷 > UART0中斷 > 1 ms定時中斷。
其中,進入主程序后,首先關(guān)閉中斷,然后進行單片機片內(nèi)寄存器設(shè)置,包括打開看門狗并設(shè)置看門狗定時器溢出時間、系統(tǒng)工作變量初始化等,之后使能中斷并進入循環(huán)等待狀態(tài)。調(diào)制輸出中斷服務(wù)程序主要完成對校正后產(chǎn)生的伺服控制量的輸出,以給出功率放大器的電流輸出量;雙口中斷服務(wù)程序主要完成對上位機雙口通信的響應(yīng),進入中斷后首先讀取上位機指令數(shù)據(jù),然后返回伺服控制器的狀態(tài)數(shù)據(jù);UART0中斷服務(wù)程序用于地面調(diào)試,完成穩(wěn)定伺服控制系統(tǒng)內(nèi)部狀態(tài)變量的監(jiān)測和軟件在線升級;1 ms定時中斷服務(wù)程序主要完成對伺服框架角和陀螺角速度等傳感器的采集、看門狗定時器清零,并根據(jù)上位機的指令數(shù)據(jù)進行校正運算,計算出穩(wěn)定平臺所需的控制量。
2.3 故障分析
經(jīng)分析與此次故障現(xiàn)象相關(guān)的中斷服務(wù)程序單元包括雙口中斷、UART0中斷和1 ms定時中斷,在排查代碼時發(fā)現(xiàn)UART0中斷的功能在試驗狀態(tài)下未按要求關(guān)閉。
UART0中斷在同一中斷矢量下有2個中斷源:一個發(fā)送結(jié)束中斷(發(fā)送中斷標志TI0置位)和一個接收完成中斷(接收中斷標志RI0置位)。如果中斷被允許,在中斷標志TI0或RI0置位時將產(chǎn)生中斷。根據(jù)芯片手冊,當單片機轉(zhuǎn)向中斷服務(wù)程序時,硬件不清除UART0中斷標志,中斷標志必須用軟件清除。
在伺服控制軟件的初始化時,UART0被設(shè)置工作于8位全雙工異步方式,收發(fā)波特率均設(shè)為38 400 b/s(對應(yīng)波特率周期為1 s/38 400=26 μs),允許接收和允許中斷,即發(fā)送結(jié)束和接收結(jié)束時都會產(chǎn)生中斷。進一步排查代碼發(fā)現(xiàn),UART0中斷服務(wù)程序只對發(fā)送中斷標志TI0進行了清零處理,未對接收中斷標志RI0進行任何處理,是一個明顯的軟件可靠性設(shè)計缺陷。
另外,以上3個程序單元的中斷優(yōu)先級由高至低設(shè)置為:雙口中斷 > UART0中斷 > 1 ms定時中斷,即1 ms定時中斷可以被UART0中斷嵌套,UART0中斷又可以被雙口中斷嵌套。
以上3個中斷中,1 ms定時中斷服務(wù)程序用于穩(wěn)定伺服平臺自閉環(huán)(光軸穩(wěn)定及電氣鎖零),雙口中斷服務(wù)程序用于響應(yīng)上位機指令進行大閉環(huán)(光軸預置及目標跟蹤),兩者在光電跟蹤系統(tǒng)中具有同等重要的地位。考慮到雙口中斷服務(wù)程序的運行時間遠小于1 ms定時中斷服務(wù)程序,所以采用雙口中斷優(yōu)先級高于1 ms定時中斷的設(shè)置,這樣穩(wěn)定伺服控制系統(tǒng)的實時性最好;而UART0接口作為地面使用的測試接口,其中斷優(yōu)先級高于1 ms定時中斷則顯然不合理。
綜上所述,伺服控制軟件存在以下2個缺陷:
(1)UART0接收中斷未進行處理;
(2)中斷優(yōu)先級排序不合理。
在以上2個缺陷中,如果UART0接收中斷異常觸發(fā),會引起接收該中斷標志RI0無法清除,導致該中斷一直占用伺服控制器單片機,進而使得優(yōu)先級低于該中斷的1 ms定時中斷無法響應(yīng),并導致1 ms定時中斷服務(wù)程序無法執(zhí)行,則傳感器信號采集和控制量校正計算將停止。在測試數(shù)據(jù)上表現(xiàn)為伺服控制器部分參數(shù)停止更新,控制量保持最后一次更新數(shù)據(jù),穩(wěn)定平臺出現(xiàn)漂移,導致穩(wěn)定平臺失穩(wěn)。
2.4 故障定位
對穩(wěn)定伺服平臺失穩(wěn)故障建立故障樹,經(jīng)對故障樹分支逐一排查,基本確定造成此故障的原因為伺服控制軟件設(shè)計缺陷,故障誘發(fā)條件為廠房內(nèi)某大功率用電設(shè)備。
光電跟蹤系統(tǒng)加電并正常工作后,重復啟動廠房內(nèi)某大功率用電設(shè)備釋放干擾,并觀察光電跟蹤系統(tǒng)工作情況,同時,使用筆錄儀監(jiān)測與伺服控制器單片機UART0連接的RS232接口接收端的電壓波動脈寬、最大峰峰值。具體如表1和圖3—圖5所示。
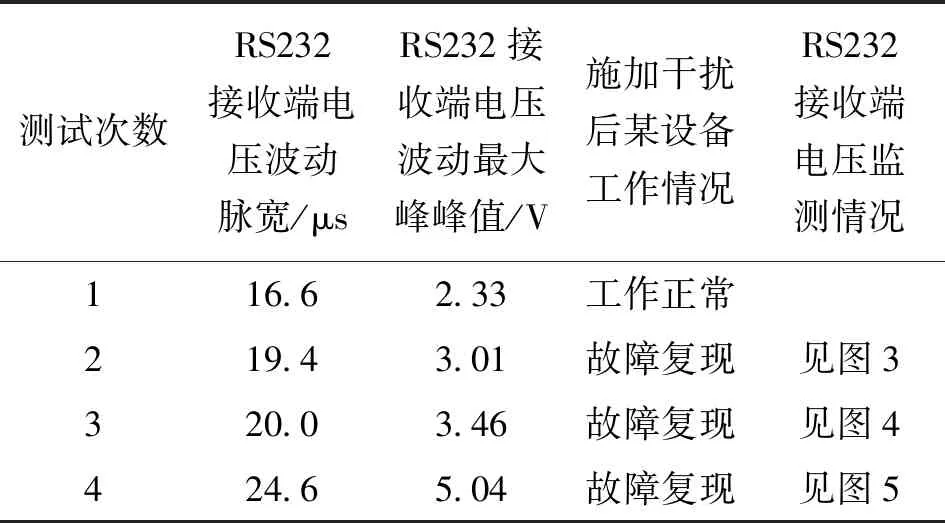
表1 某大功率用電設(shè)備干擾試驗結(jié)果
該試驗環(huán)境下,當干擾到達RS232接收端的尖峰脈沖寬度為20 μs左右時,對光電跟蹤系統(tǒng)的伺服控制器造成干擾,出現(xiàn)穩(wěn)定伺服平臺失穩(wěn),20 μs與UART0設(shè)置的波特率相匹配,被UART0誤讀為有效數(shù)據(jù)接收,因此故障得以定位。
3 故障機制
由于伺服控制軟件設(shè)計存在的缺陷,未對不用的伺服控制器單片機片內(nèi)UART0(異步串行收發(fā)器0)的接收中斷進行禁止以及在中斷服務(wù)程序中未清除接收中斷標志位RI0,進行系統(tǒng)試驗時,廠房內(nèi)大功率用電設(shè)備產(chǎn)生的電磁干擾串入伺服控制器的RS232接口(其內(nèi)部與伺服控制器UART0連接),致使RS232串口接收線上產(chǎn)生超過+3 V(RS232電平轉(zhuǎn)換器的輸出由空閑狀態(tài)的邏輯1變?yōu)檫壿?)且時間不小于13 μs(波特率38 400周期的一半)的干擾信號。被伺服控制器單片機誤讀為UART0串行輸入數(shù)據(jù)的起始位,9個波特率時鐘后,UART0的接收中斷被異常觸發(fā),伺服控制軟件不斷進入該中斷,從而使伺服控制主流程(中斷優(yōu)先級較低的1 ms定時中斷服務(wù)流程)無法正常執(zhí)行,導致伺服部分參數(shù)(框架角和控制量)不更新,穩(wěn)定平臺不能正常控制,導致出現(xiàn)故障。
4 解決措施及有效性驗證
在伺服控制軟件中,合理的優(yōu)先級設(shè)置應(yīng)該為:雙口中斷 > 1 ms定時中斷 > UART0中斷,但是,由于器件限制,伺服控制器單片機無法將UART0中斷優(yōu)先級設(shè)置為低于1 ms定時中斷,因此只能采取關(guān)閉UART0的措施對此類故障進行規(guī)避,一并采取多重軟件可靠性措施。具體措施如下:
(1)將UART0控制寄存器設(shè)置為不允許接收,伺服控制軟件UART0初始化配置單元作如下更改:
更改前為
void UART_Init(void)
{
…
SCON0 = 0x50;
…
}
更改后為
void UART_Init(void)
{
…
SCON0 = 0x40;
…
}
(2)在中斷屏蔽寄存器中禁止UART0中斷,伺服控制軟件中斷初始化配置單元作如下更改:
更改前為
void Interrupts_Init(void)
{
IE = 0x91;
…
}
更改后為
void Interrupts_Init(void)
{
IE = 0x01;
…
}
(3)為UART0中斷設(shè)置空的中斷服務(wù)程序,程序中清除接收和發(fā)送中斷標志,然后設(shè)置中斷屏蔽寄存器為禁止UART0中斷,以避免該中斷在被異常觸發(fā)的情況下,也能及時退出中斷服務(wù)程序。更改前為
void UART0_ISR(void) interrupt 4
{
…
… // 將組裝完成的監(jiān)測數(shù)據(jù)寫入UART0發(fā)送緩沖區(qū)
…
}
更改后為
void UART0_ISR(void) interrupt 4
{
SFR_PGSaver3 = SFRPAGE;
SFRPAGE = UART0_PAGE;
RI0 = 0; // 清零UART0接收中斷標志
TI0 = 0; // 清零UART0發(fā)送中斷標志
ES0 = 0; // 禁止UART0中斷
SFRPAGE = SFR_PGSaver3;
}
為了驗證上述更改的有效性,在試驗室建立了此故障的模擬環(huán)境,按以上措施修改伺服控制軟件。系統(tǒng)加電,待系統(tǒng)工作正常后,啟動故障注入裝置,系統(tǒng)仍工作正常;系統(tǒng)斷電,恢復伺服控制軟件為原設(shè)計狀態(tài),系統(tǒng)上電,正常工作后,啟動故障注入裝置,系統(tǒng)故障復現(xiàn),表明措施有效。
5 案例啟示
經(jīng)過問題回溯發(fā)現(xiàn),伺服控制軟件在設(shè)計、開發(fā)過程中不符合GJB/Z 102——1997《軟件可靠性和安全性設(shè)計準則》中第5.8.1.3條:“對于電磁輻射、電磁脈沖、靜電干擾,以及在太空中使用的計算機可能遇到的宇宙重粒子的沖擊,硬件設(shè)計應(yīng)按規(guī)定要求將這些干擾控制在規(guī)定得水平之下,軟件設(shè)計要使得在出現(xiàn)這種干擾時,系統(tǒng)仍能安全運轉(zhuǎn)。”軟件設(shè)計開發(fā)人員對軟件可靠性和安全性方面的相關(guān)設(shè)計標準和要求掌握得不夠深入,造成了軟件設(shè)計缺陷。技術(shù)人員在進行裝備軟件設(shè)計時,首先應(yīng)將系統(tǒng)的所有激勵源納入設(shè)計考慮,比如此案例中,所有中斷都是系統(tǒng)的激勵源(即使沒被使能),必須考慮如何響應(yīng)那些非期望激勵;充分重視非正常流程分支的合理設(shè)計,同時對于在復雜電磁環(huán)境條件下工作的設(shè)備,對外接口應(yīng)考慮采用隔離電路和相應(yīng)的軟件設(shè)計來屏蔽干擾;對產(chǎn)品應(yīng)用環(huán)境和條件充分了解,尤其對裝備軟件的特殊要求應(yīng)掌握全面,并貫徹到軟件的設(shè)計和開發(fā)之中。
如今,軟件故障已成為航天系統(tǒng)失敗的重要因素,此次發(fā)生的故障在采用軟件靜態(tài)分析技術(shù)后應(yīng)能在裝機前得以暴露和解決[13]。在采取以上設(shè)計措施的基礎(chǔ)上,后續(xù)還應(yīng)規(guī)范和加強軟件分析和測試工作,消除故障潛回路,提高航天嵌入式軟件的安全性與可靠性。
同時,軍代表在裝備研制跟蹤中,需督促承制單位加強規(guī)范化設(shè)計,貫徹、執(zhí)行航天標準,形成統(tǒng)一成熟的軟、硬件設(shè)計規(guī)范,以加強電路的抗干擾能力設(shè)計和軟件的安全性、可靠性設(shè)計。
6 結(jié)束語
文中針對穩(wěn)定伺服平臺失穩(wěn)現(xiàn)象,分析了失穩(wěn)故障機制,受硬件限制,中斷優(yōu)先級無法調(diào)整,只是采取了關(guān)UART0中斷等措施進行綜合治理,并再次在試驗環(huán)境下驗證分析。結(jié)果表明:伺服控制軟件中設(shè)置不當?shù)闹袛嘣谙鄳?yīng)接口受到干擾后,引發(fā)了伺服平臺失穩(wěn)現(xiàn)象;改進后的伺服控制軟件在故障干擾條件下仍能正常工作,具有良好的魯棒性,為復雜電磁環(huán)境下應(yīng)用的設(shè)備的設(shè)計工作帶來新的啟示。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
電子制作(2019年13期)2020-01-14 03:15:28
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
沈陽醫(yī)學院學報(2015年1期)2015-12-27 13:44:40
醫(yī)學教育管理(2015年3期)2015-12-01 06:43:16
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39