石油石化企業智能巡檢機器人的使用現狀與對策
2022-11-28 05:37:16張曉軒
中國管理信息化 2022年19期
張曉軒
(大慶煉化公司信息中心,黑龍江 大慶 163411)
0 引言
石油石化企業主要從事石油化工方向的生產加工,其生產常常處于高溫高壓、易燃易爆以及有毒氣體的環境當中,具有極高的危險性。同時,石油石化企業在生產過程中還會大量使用多樣化、大型化和復雜化的設備,因此,石油石化企業對生產工藝的穩定性要求極高,在實際工作過程中,需要時刻確保各生產設備的穩定運行,所以設備的保養和維護工作尤為重要。
石油石化企業生產設備多且雜,并且檢測流程長,使得傳統人力巡檢模式耗費人力資源過大,生產成本難以得到有效控制,生產效率也不符合石油行業的現代化發展需求。因此石油石化企業巡檢工作逐漸向著智能化、一體化的檢測方向進行探索和發展,也因此催生了智能化的檢測技術。本文主要探討智能巡檢機器人的使用現狀和未來發展,為石油石化企業巡檢技術的進步提供參考。
1 石油石化企業巡檢現狀分析
目前智能巡檢機器人尚未在石油石化企業當中得到廣泛應用,企業主要還是采用傳統的巡檢方式,不過隨著技術的革新和市場環境的變化,石油石化企業的巡檢技術在不斷進行更新換代,巡檢方式也在不斷變化。
1.1 巡檢方式的變化
石油石化企業巡檢方式的變化大體分為三個階段:①人工巡檢階段,人工巡檢的主要工作內容包括設備檢查、紙質表格記錄和手動維護與保養設備,工作人員將巡檢結果帶回相應的管理部門,由專業的技術人員判斷設備是否出現故障,是否需要維修,從而保障企業的生產安全。②信息點巡檢階段,這一階段主要是建立信息點巡檢系統,對于各設備的關鍵部位做定時巡檢,將巡檢記錄在數據庫中,等待巡檢人員的查閱,搭配人工巡檢的方式,保證設備的各處細節都能夠得到檢查,為企業生產安全提供有力的保障。③智能巡檢系統,該系統主要利用信息化巡檢方式,對檢測路線進行智能排序,通過后臺計算幫助設計最優巡檢路徑。巡檢路徑的設計基于整體設備在拓撲網絡中的距離,以及各檢測數據的優先順序,對噪聲、溫度、振動頻率等參數進行了關聯,使得整個檢測系統更加全面且高效。
1.2 各類巡檢方式存在的問題
1.2.1 人工巡檢的問題
①巡檢路線重疊。在人工巡檢的過程中,由于各部門的技術特點不同,所以對設備的關注度也不同,因此,各單位人員無法確保能夠統一行動,還會導致出現同一個設備經常因為被多人檢測,反復開啟關閉的現象,管理人員在巡視的過程中需要統計常規巡查點、關鍵巡查點和特護巡查點,點位的巡查頻次和時間段都要精心設計,才能保證巡檢路線盡可能地精簡,這樣就會耗費大量人工成本。②巡檢內容流于形式。人工巡檢的另一大問題就是因為設備存在復雜性高且數量大的特性,極易導致巡檢的任務過重,內容過多,巡檢過程中還需要在確保各類記錄數據精準的前提下,記錄各項內容,此過程極易出現人為失誤,進而影響企業生產安全,久而久之,巡檢人員為了減少記錄錯誤的出現,巡檢工作往往只做表面工作,更加影響了生產安全。
1.2.2 信息點巡檢系統的問題
信息點巡檢系統能夠定期檢測企業設備關鍵節點的工作情況,在一定程度上解決了人工巡檢不到位和工作流于表面的情況,但是受技術特點限制,巡檢的質量無法得到有效改善,因為信息點巡檢的方式忽略了人工巡檢過程中“聽、摸、看、聞”的工作,只能通過收集設備節點的數據來判斷,使得這種巡檢方式的誤差率也較高[1]。
1.2.3 智能巡檢系統的問題
智能巡檢系統是一種建立在信息點巡檢系統基礎上的智能化巡檢方式,結合各類傳感器的智能化控制優勢,同時具備了人工巡檢和信息點巡檢的優點,并且能夠解決人工巡檢和信息點巡檢系統運行存在的問題。但是智能巡檢系統也存在一定的缺陷,當智能巡檢系統發現設備出現故障時,依然要依靠技術人員來做維修和保養,工作人員的安全性依然很難得到有效保障,因此,如何有效降低巡檢方式危險性就成為當前智能巡檢系統建設所關注的重要課題。
2 石油石化企業智能巡檢機器人的使用現狀
智能巡檢機器人是石油石化企業在巡檢工作中發展的一種集多種優點于一身的巡檢技術,它不但能夠展開“聽、摸、看、聞”工作,也能夠將多個部門的檢測工作集于一身,還能夠自行設計巡檢路線,最重要的是能夠在一些保養和維修工作上替代人力,真正實現了精準、高效、可靠和安全的巡檢。目前只有少數石油石化企業使用了智能巡檢機器人。
2.1 電力巡檢機器人
石油石化企業的生產工藝復雜,對電力的需求是非常高的,因此電力設備的順利工作是保障企業生產的基礎。目前我國主要推廣電力巡檢機器人的使用,對企業工廠中的配電站、用電室做定期的檢測,巡檢機器人可以無視天氣的影響,也能夠幫助無人值班或少人值班的配電站完成定期的巡檢任務,在石油石化企業的人力成本控制、用電安全、生產穩定性等方面發揮積極的作用。
2.2 油氣巡檢機器人
油氣巡檢機器人主要應用在檢測易燃易爆有毒有害的物質方面,巡檢任務難度較大。目前美國的國家機器人工程中心研發了一臺適用于油氣行業環境的機器人,該機器人有較高的防護能力,能夠在危險環境中連續工作6 個月以上不需檢修。油氣巡檢機器人的主要工作是檢測石油管道、閥門、泵和油氣設備的儀表(包含了溫度、壓力、振動頻率等數據),但是因為技術原因,該機器人并未達到完全智能化,現在仍然是半自動化控制。
2.3 石油石化設備巡檢機器人
石油石化設備巡檢機器人是目前最為先進的機器人,將多種傳感器、攝像頭、報警器集于一體,能夠實時檢測工廠設備的溫度、壓力和有毒氣體的存在情況,也能夠對石油石化設備的閥門、儀器儀表、管道進行檢查。為了方便機器人的行動,工廠道路上和設備旁創設了一條帶有磁條的檢查路線,以便于巡檢機器人沿著磁條線路前進,并且按照自身設計的巡檢線路進行導航。
3 石油石化企業智能巡檢機器人的未來發展
從目前石油石化企業智能巡檢機器人的使用情況來看,機器人需要克服多種使用困難,并且提供多種檢測功能,才能保證優于其他的傳統巡檢方式,才能夠最大限度減少企業成本,減少人身傷害風險。
未來石油石化企業智能巡檢機器人的發展方向是具備自動或半自動移動能力,對設備的各項數據檢測有很高的敏感性,智能識別設備數據情況,將檢測結果實時傳到后臺,加強自身的防護能力。按照以上要求設計出來的智能巡檢機器人的組成模塊如圖1 所示。
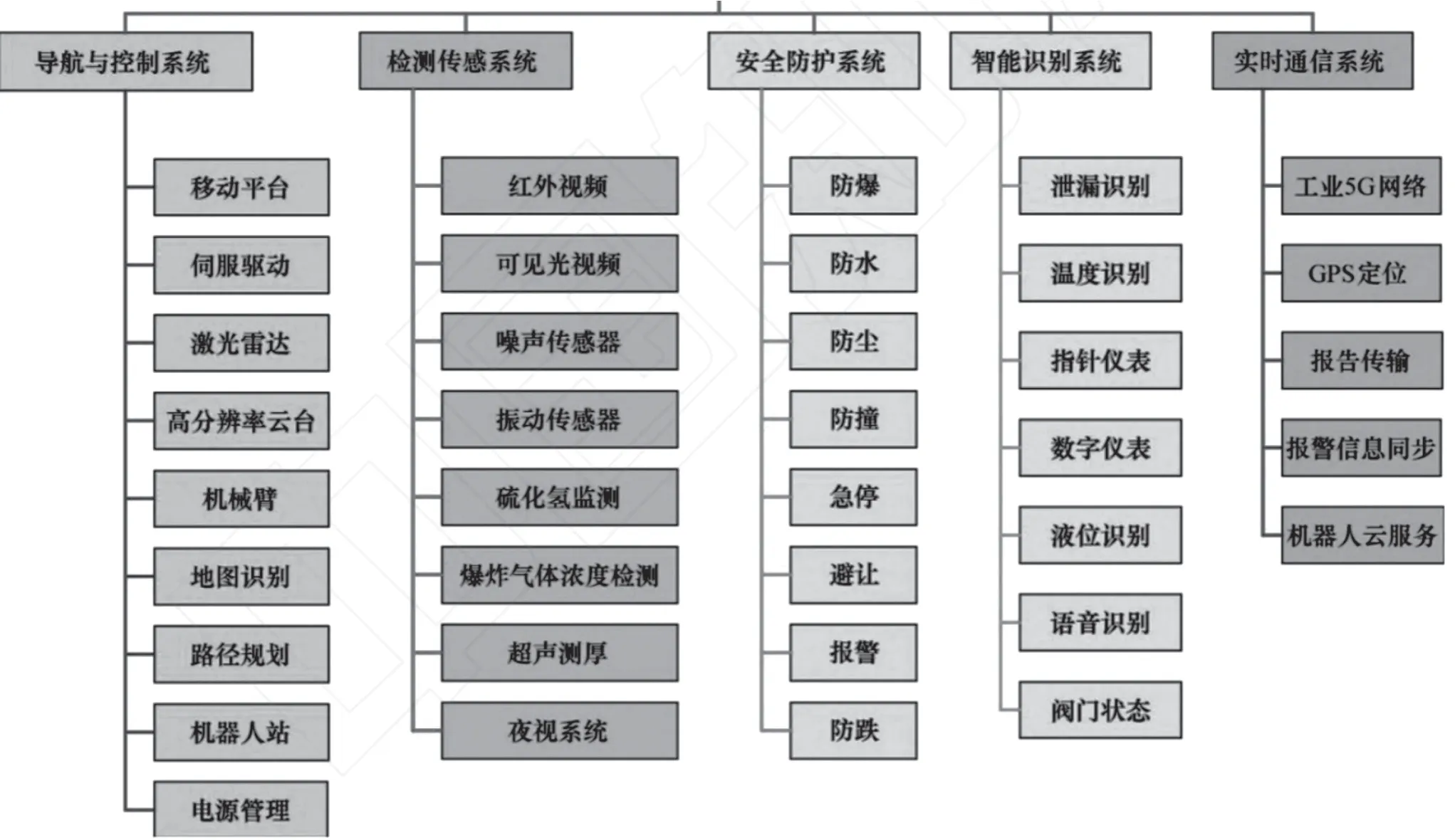
圖1 智能巡檢機器人組成模塊
3.1 自主導航控制
自主導航控制模塊是智能巡檢機器人的構成基礎,為了保證機器人能夠代替人工巡檢,自主移動技術的解決尤為關鍵。自主導航控制不同于無人駕駛汽車,雖然二者都是自己移動,但是無人駕駛汽車的路況檢測更為煩瑣,所以很難實現,而機器人的移動環境更加簡單,所以目前有可供參考的解決方案:自主導航控制模塊可以利用地圖識別做定位,利用激光雷達做距離判斷,利用移動平臺和路徑規劃做自主移動,最后利用伺服系統來控制機器人的啟動停止加減速和轉向[2]。機器人還配備了機械臂等輔助器件,當其移動到不規則的設備旁時,可以利用機械臂的伸展來達到巡檢的目的,機械臂擴大了機器人的巡檢空間,使得機器人可以在移動的過程中存在一定范圍內的位置誤差,在一定程度上降低了實現精準移動的難度。
3.2 高性能檢測傳感
高性能檢測傳感模塊是智能巡檢機器人實現數據收集的基礎,智能巡檢機器人需要同時收集設備的溫度情況、壓力情況、有毒氣體泄露情況和工作振動情況,因此自身需要攜帶紅外攝像頭、可視攝像頭、噪聲傳感器、振動傳感器、硫化氫監測器、超聲檢測器等設備,為了實現機器人的夜間工作,還需要裝備夜視系統。隨著石油石化企業對機器人使用的熟練度增加,技術人員可以根據實際需要增加或減少機器人的傳感器配置,減少機器人的負荷,讓機器人更加高效精準地工作。
3.3 智能識別
智能識別模塊是智能巡檢機器人的大腦,上一步通過各種傳感器傳遞過來的數據需要通過智能識別模塊來做進一步的甄別,每個數據都有獨自的子識別模塊,方便機器人能夠實時診斷設備的運行狀態。泄露識別主要用于分辨氣體和液體的泄漏情況,氣體識別可以通過高光譜紅外識別熱像儀來判斷,不但能夠測出氣體的濃度,還能夠準確定位泄漏位置;液體識別則可以根據地面上液體的顏色、流速、泄漏面積等因素綜合判斷,再通過大數據的計算得出泄漏情況。溫度識別、閥門狀態、數字儀表等子識別模塊的實現更為簡單,只需在程序中輸入各個預設數據,再相比較即可。語音識別則是可以結合人工智能自然語言處理技術,利用神經網絡幫助機器人更好地理解后臺工作人員傳達的語音指令,從而提高機器人的工作適應性[3]。
3.4 實時通信
實時通信模塊是智能巡檢機器人與后臺控制室的交互媒介,在特殊巡檢情況下,智能機器人需要配合技術人員一同做巡檢工作,為了減少人身傷害的風險,技術人員可以坐在后臺控制室內,利用實時通信模塊與機器人交互。實際工作中,技術人員可以利用GPS 定位來判斷與自己交互的機器人位置,利用5G 網絡加快信息傳輸速度,通過云平臺的高效計算,實時響應數據結論,為技術人員的判斷提供參考,幫助其第一時間操控機器人做巡檢工作。
3.5 自身防護
自身安全防護是智能巡檢機器人順利工作的保障,石油石化企業的生產環境是非常危險的:從空中來看,氣體中充斥著大量的粉塵,很容易附著于機器人的表面,影響傳感器的工作,也有可能造成金屬腐蝕;從地面上看,工廠設備大小不一,擺放位置也很難規律,地面也有可能存在路檻,使得機器人出現碰撞、跌倒的情況;從設備自身來看,當出現高壓爆炸、液體泄漏的情況時,機器人也會受到相應的沖擊和腐蝕。所以自身安全防護對于機器人的設計非常關鍵,機器人要能夠防爆、防撞、防水、防塵,在行動的過程中也要能夠智能判斷是否要急停、避讓、轉向、防跌,必要時可以及時報警來減少企業的損失。
4 石油石化企業智能巡檢機器人應用的技術難點
智能巡檢機器人應用在石油石化企業的優點繁多,但是想要真正實現所有的功能仍然面臨著一些技術問題:首先是場地問題,一些大型企業的工廠布置不僅限于地面,還有一些設備存放在空間位置,人工巡檢可以通過攀爬扶梯、經過懸空走廊到達巡檢位置,但是機器人很難做到;其次是由于石油石化企業占地面積大,導致網絡覆蓋強度不高,機器人在巡檢的過程中很有可能受到不明電磁信號的干擾,或是網絡信號被屏蔽,導致工作無法順利進行;最后是液體泄漏的識別問題,現有的技術無法實現識別大多數液體,因為大數據需要根據液體的顏色、流速、滲漏面積等綜合數據才能完成識別工作,準確率無法達到百分之百,更復雜的是現場設備出現泄漏時,液體的影像往往會受到環境光線、地面傾斜角度等因素影響,導致人工智能識別液體的難度急劇上升。
5 結語
智能巡檢機器人的研發應用是石油石化企業未來實現高質量發展的關鍵所在。智能巡檢機器人在代替人工進行巡檢工作方面具有較為明顯的優勢,可以有效降低巡檢人員的勞動強度和安全風險,極大程度上保證了石油石化企業的安全生產,同時實現人力資源管理成本的有效控制;智能巡檢機器人可以通過應用自身裝配的多種智能傳感器實現原本多人合作才能完成的巡檢任務,還能夠切實提升巡檢工作的質量與效率,同時確保檢測精度不低于人工巡檢模式。隨著科學技術的不斷發展,云計算、大數據、人工智能技術的廣泛應用,能夠有效幫助智能巡檢機器人不斷完善巡檢功能,進而實現巡檢工作的革命性變化。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12