基于宇稱時間對稱原理的無人機無線充電技術*
2022-11-28 12:30:44鄭萃翀肖文勛唐哲人
中山大學學報(自然科學版)(中英文) 2022年6期
關鍵詞:系統(tǒng)
鄭萃翀,肖文勛,唐哲人
華南理工大學電力學院,廣東 廣州 510640
無線電能傳輸(WPT,wireless power transfer)實現(xiàn)了電源與負載之間的完全電氣隔離,具有靈活、安全和可靠等特點。目前,WPT 技術已廣泛應用于電動汽車、手機和機器人充電中[1-4]。同時,無人機作為一項新興技術,極大推動了電力巡檢、邊境巡防等行業(yè)的發(fā)展。WPT 技術為無人機續(xù)航提供了一種理想的解決方案,是推動工業(yè)無人化、智能化的關鍵一環(huán)[5-6]。
目前,已有一些學者對無人機無線充電技術展開了研究。文獻[7]研究了采用空心拾取線圈進行無人機無線充電,但系統(tǒng)傳輸功率較低,效率僅為63.4%。文獻[8]提出了在無人機起落架底部裝設小型平面線圈,該方案不會對無人機底部設備產生干擾,但系統(tǒng)對于錯位容忍度低。文獻[9]提出了一種采用原邊功率閉環(huán)控制進行恒流-恒壓充電的無人機無線輸電拓撲,但該方法抗偏移能力差且需要原副邊通信,容易受延遲或電磁干擾的影響,從而影響系統(tǒng)穩(wěn)定性。
由文獻分析可知,無線充電技術在無人機充電領域存在系統(tǒng)抗偏移能力差、鋰電池的恒流-恒壓充電控制、拾取線圈對無人機自身設備的干擾等亟待解決的問題。因此,本文提出一種基于PT對稱的原邊控制方法,PT 對稱系統(tǒng)指的是經(jīng)過宇稱-時間反演變換時系統(tǒng)特性保持不變,而在單獨的時間反轉或是單獨的宇稱反轉時系統(tǒng)特性發(fā)生變化的一類系統(tǒng)[10-11]。基于PT 對稱的WPT 系統(tǒng)可以自動實現(xiàn)與耦合系數(shù)無關的恒定輸出功率和恒定傳輸效率,無需原副邊通信及副邊控制,可以解決無人機無線充電抗偏移能力差的問題。
1 宇稱時間對稱無線充電系統(tǒng)
1.1 系統(tǒng)建模
S-S 型無線電能傳輸系統(tǒng)的電路模型,如圖1所示。-Rn為交流功率源,RL為負載,L1、L2為發(fā)射、接收線圈自感,M為兩線圈之間的互感,C1、C2為發(fā)射、接收端補償電容,r1、r2為發(fā)射、接收線圈內阻。
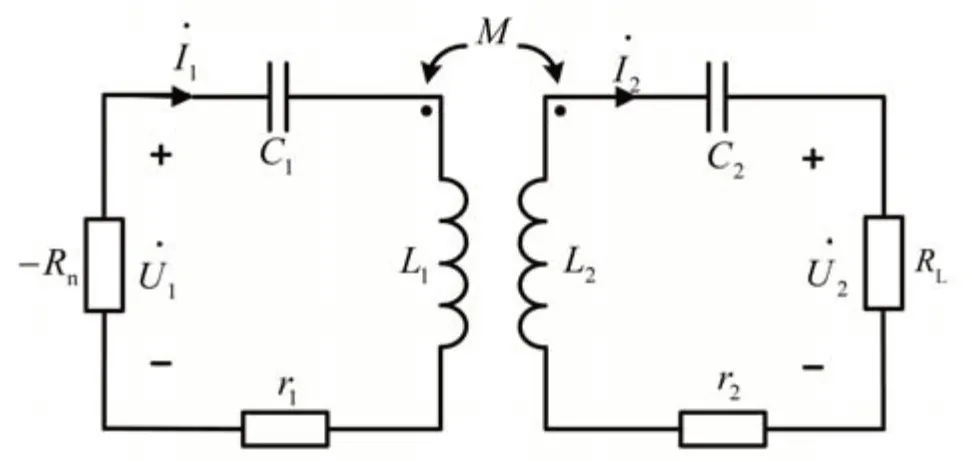
圖1 S-S型無線電能傳輸系統(tǒng)Fig.1 S-S magnetic coupling resonant WPT system
對圖1列寫電路方程,為
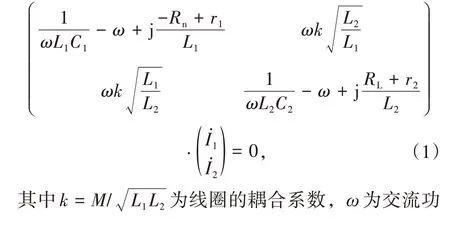
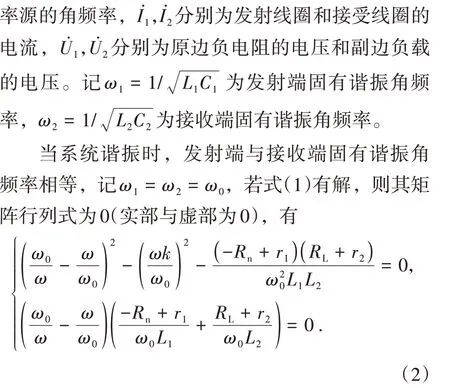
根據(jù)式(2),分別討論ω=ω0與ω≠ω0兩種情況下的解。
1)當ω=ω0時,系統(tǒng)工作在PT 破碎態(tài),由式(2)解得

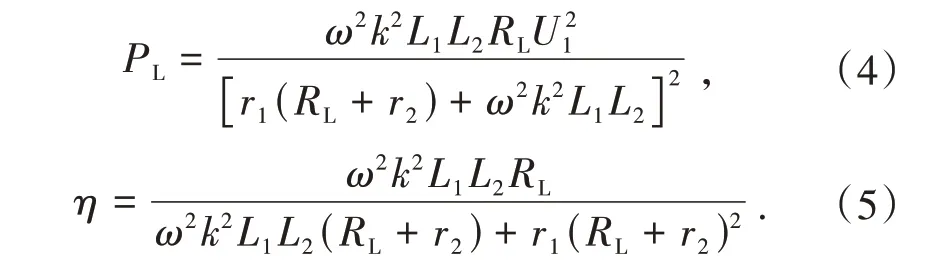
將式(3)代入式(1),可推導出系統(tǒng)在破碎態(tài)區(qū)域的輸出功率PL、效率η表達式為
此時,系統(tǒng)與S-S 型磁耦合無線電能傳輸系統(tǒng)等效。由于ω=ω0,系統(tǒng)恒工作于諧振頻率點f0.
2)當ω≠ω0時,系統(tǒng)工作在PT 非破碎態(tài),自然滿足

即

將式(2)、(6)代入(1),可得
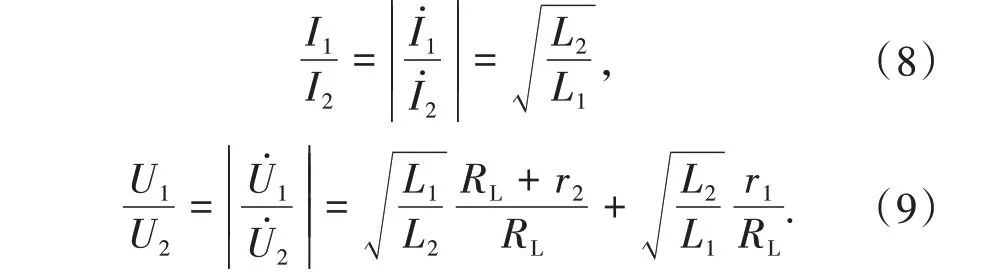
由(7)~(9)式,推導出系統(tǒng)在非破碎態(tài)區(qū)域的輸出功率和效率為


由式(10)、(11)可知,系統(tǒng)輸出功率、效率均與耦合系數(shù)無關,系統(tǒng)具有很強的抗偏移特性。輸出功率僅由功率源輸出電壓、負載、發(fā)射和接收線圈自感的比值以及線圈內阻決定;效率僅由負載、發(fā)射和接收線圈自感的比值以及線圈內阻決定。線圈內阻越小、RL越大,系統(tǒng)效率越高。
將式(6)代入式(2),得
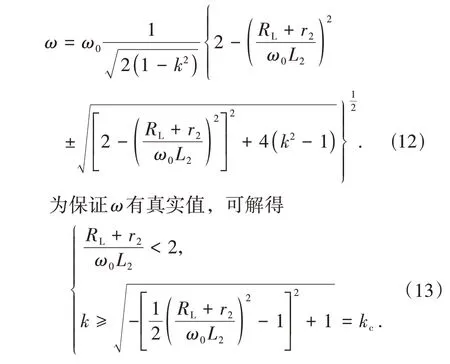
其中kc為臨界耦合系數(shù)。當k>kc時,系統(tǒng)處于PT對稱非破碎態(tài),即磁耦合諧振中的過耦合區(qū)域;當k=kc時,系統(tǒng)處于臨界耦合狀態(tài);當k<kc時,系統(tǒng)處于PT 對稱破碎態(tài),即磁耦合諧振中的欠耦合區(qū)域。為保證系統(tǒng)工作于非破碎態(tài),在系統(tǒng)參數(shù)設計時,必須滿足k>kc并留取一定裕度。
3) 記接收側品質因數(shù)Q2=,由式(13)得
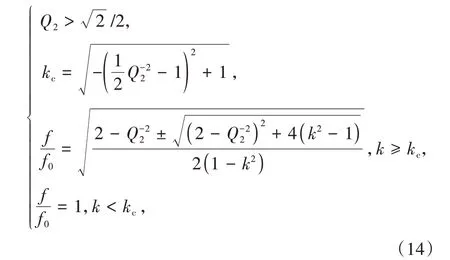
式中f0=ω0/2π。歸一化頻率f/f0與k和Q2的關系,如圖2所示。
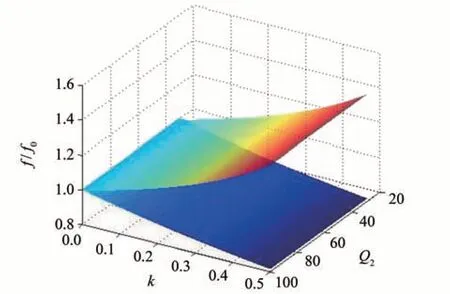
圖2 非破碎態(tài)PT對稱系統(tǒng)頻率特性Fig.2 Frequency characteristics of non-broken PT symmetric system
在過耦合區(qū)域,工作頻率向固有諧振頻率f0的兩邊偏移,分裂成為高頻分支fH和低頻分支fL.隨著k的減小,與逐漸匯聚至f0.可以看到,相較于受耦合系數(shù)的偏移影響更小,并且兩個分支幾乎不受Q2的影響。在實際中,非破碎態(tài)PT 對稱系統(tǒng)僅能穩(wěn)定工作于其中一個頻率分支fL或fH.
1.2 基于宇稱時間對稱的原邊控制技術
針對無人機輕便化與恒流-恒壓充電的需求,本文提出一種基于PT 對稱的原邊控制系統(tǒng),如圖3 所示。該控制技術不涉及副邊控制與原副邊通信,副邊電路可以盡量簡化。圖3 中,Uin為輸入直流電源,Ud為Buck 變換器輸出電壓,也是全橋逆變器輸入直流電壓,Ro為負載等效電阻,ro為鋰電池等效歐姆電阻,Uoc為鋰電池空載電壓。該控制包括逆變器自振蕩控制和原邊Buck 變換器的閉環(huán)調節(jié)控制兩個部分。
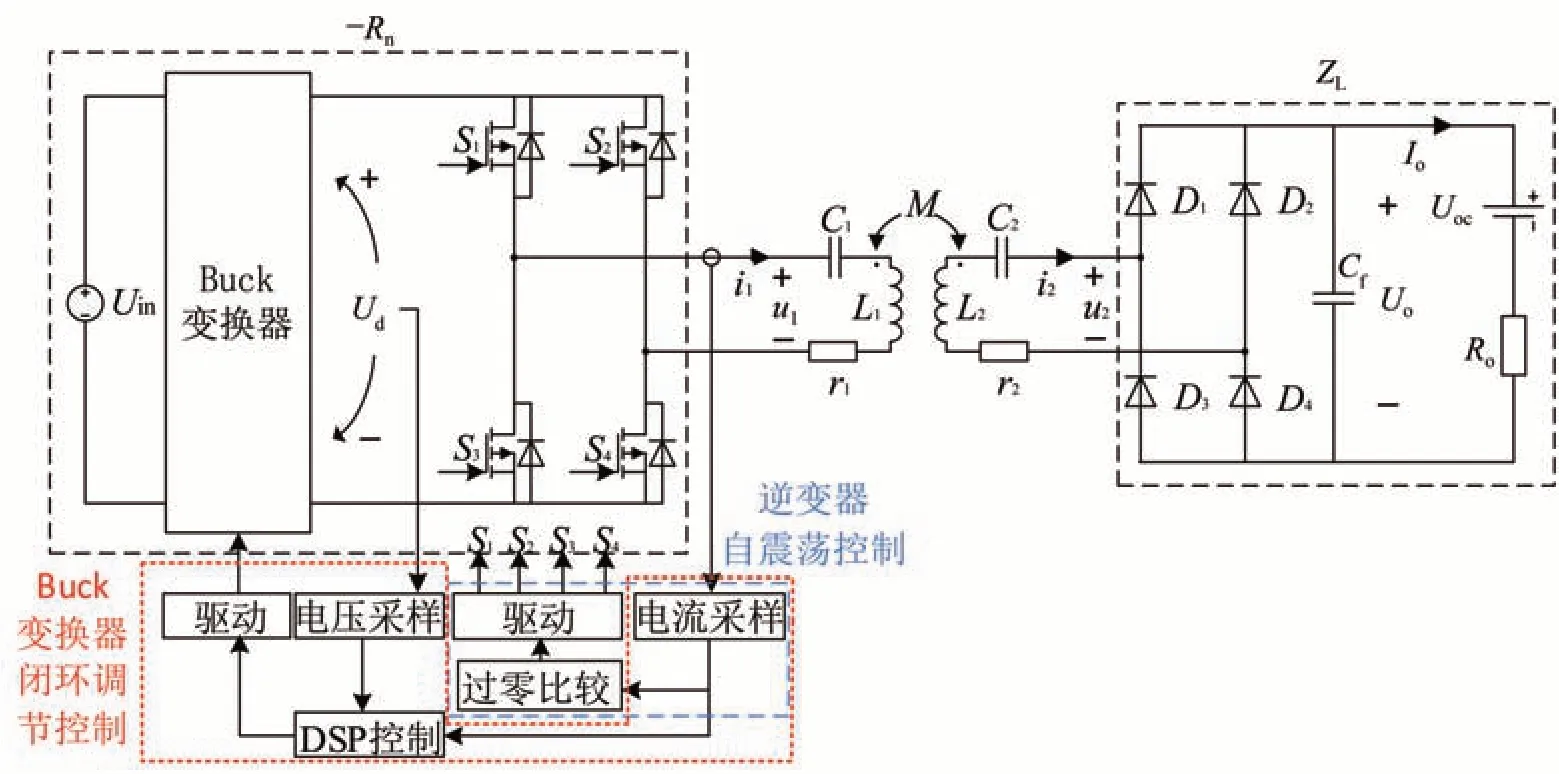
圖3 基于宇稱時間對稱原理的原邊控制方法系統(tǒng)框架Fig.3 System framework of primary edge control method based on PT symmetric principle
逆變器自振蕩控制采用模擬控制方式,通過采樣逆變器輸出電流i1進行過零比較,經(jīng)過驅動環(huán)節(jié)最終驅動逆變器開關管。逆變器輸出電壓u1始終與輸出電流i1保持同相位,方波u1的幅值等于Ud,其有效值U1與的關系為

Buck變換器閉環(huán)調節(jié)控制采用數(shù)字控制方式,通過采樣Ud以及全橋逆變器輸出電流有效值I1,利用DSP 執(zhí)行控制算法,最終控制Buck 變換器占空比,實現(xiàn)恒流-恒壓充電控制。
接收側采用全橋整流電路,輸入電流i2為正弦波,電池電流Io與電流i2的有效值I2的關系為



由上推導出輸出端電池電流Io、電池電壓Uo、負載等效電阻Ro為
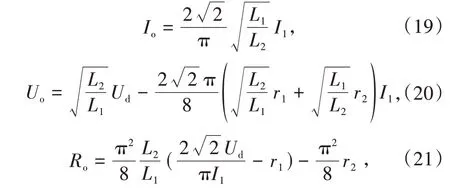
式中L1、L2、r1、r2可以通過阻抗分析儀進行測量。頻率在150~200 kHz 范圍內變化時,線圈內阻變化小于0.02 Ω,可以認為基本保持不變;兩線圈發(fā)生垂直距離、水平偏移距離變化時,由于發(fā)射側與接收側線圈結構、鐵氧體結構均對稱且相同,因此L1與L2的比值基本保持恒定。
通過對PT 對稱無線電能傳輸系統(tǒng)的分析,得到了接收側參數(shù)估計式。這表明通過采樣發(fā)射端的Ud與I1,不僅可以進行負載識別,而且可以得到電池電流與電壓的估計值,從而進行相應的控制,全程無需檢測互感值,且不需要原副邊通信。
2 原邊控制系統(tǒng)設計
2.1 鋰電池充電曲線
目前,無人機電池大多為動力鋰電池,恒流-恒壓分段式充電不僅可以縮短鋰電池充電時間,提高鋰電池充電效率,并且可以延長電池壽命。本文選用規(guī)格為5 300 mAh/11.1 V 的無人機動力鋰電池作為負載進行研究,該電池允許快速充放電,能夠承受1C 充電速率下的充電電流。1C 是指1 小時充滿電池,對于該款電池的容量而言,恒流充電電流為5.3 A,恒壓充電電壓為12.6 V。設定充電電流為0.2 倍恒流充電電流時停止充電,該款鋰電池恒流-恒壓充電曲線如圖4所示。充電過程中,鋰電池等效歐姆電阻ro逐漸增大,對應的等效負載電阻Ro也在增大。
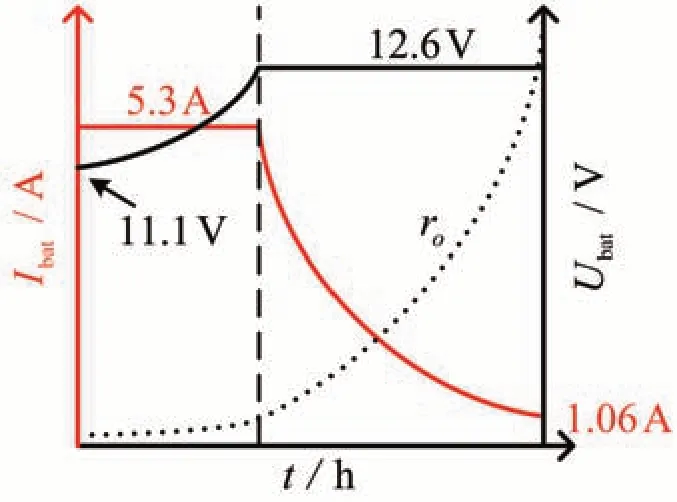
圖4 恒流-恒壓充電曲線Fig.4 Constant current-voltage charging curve
2.2 控制算法與流程
當負載發(fā)生變化時,可通過式(19)、(20)得到電池電流、電壓的估計值,通過PI算法產生PWM信號驅動發(fā)射端Buck 電路的開關管,從而實現(xiàn)恒流或恒壓控制,控制算法框圖見圖5。
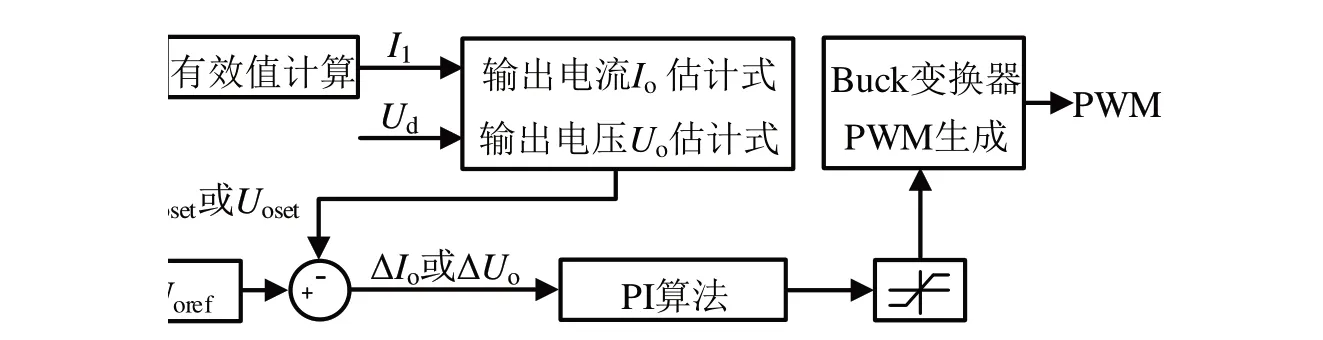
圖5 電池電流、電壓控制算法框圖Fig.5 Block diagram of battery current and voltage control algorithm
以上參數(shù)估計式與控制算法均以PT 對稱無線電能傳輸系統(tǒng)為基礎,因此必須保證系統(tǒng)工作于非破碎態(tài)區(qū)域,可以通過檢測i1的頻率判斷系統(tǒng)是否處于k>kc區(qū)域。當系統(tǒng)處于破碎態(tài)區(qū)域時,發(fā)出錯位警告并重新定位。對于該系統(tǒng)而言,可允許線圈之間8 cm 以上的水平偏移以及8 cm 以上的垂直傳輸距離,可滿足絕大部分無人機無線充電應用場景。根據(jù)鋰電池恒流-恒壓充電曲線,不難計算出充電開始、恒壓恒流切換、充電結束時對應的負載等效電阻RL分別為2.09、 2.38、11.89 Ω。根據(jù)式(21)進行負載識別,判斷當前電池的充電階段,并執(zhí)行相應的控制算法。恒流-恒壓充電控制流程見圖6。
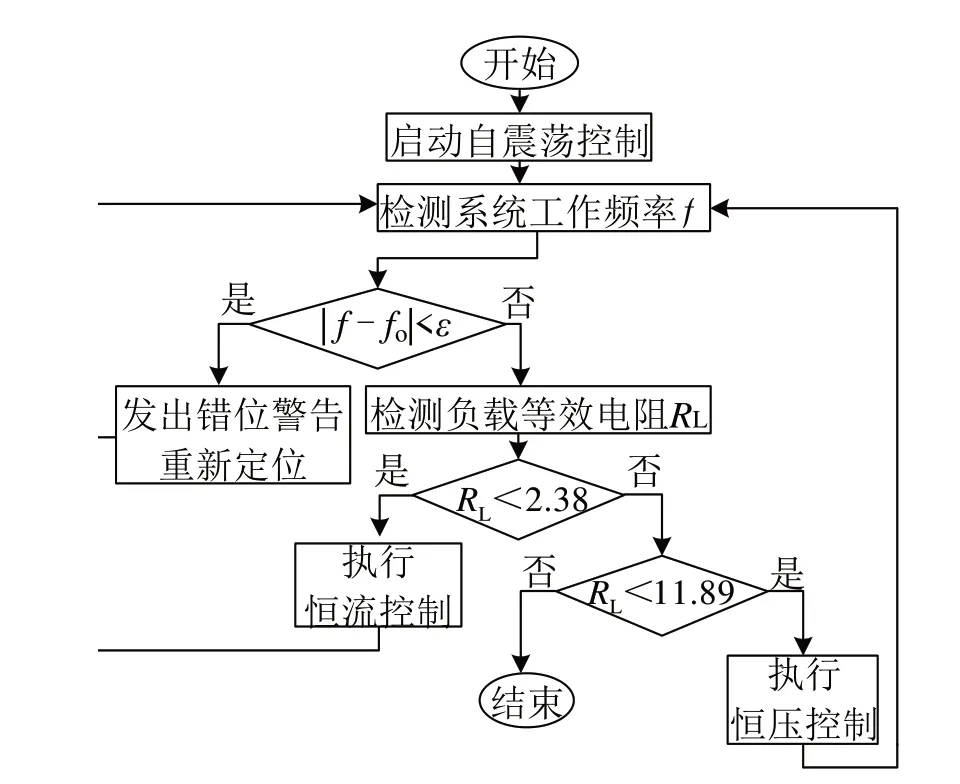
圖6 恒流-恒壓充電控制流程圖Fig.6 Constant current-voltage charging control flow chart
3 實驗驗證
3.1 實驗設計
為了驗證所提出的鋰電池充電控制方法,搭建如圖7所示的實驗樣機。實驗中,負載由直流電子負載提供,以模擬實際鋰電池充電特性。實驗樣機的具體參數(shù)見表1,PI 控制器的參數(shù)設定為比例系數(shù)P=1,積分系數(shù)I=0.002。
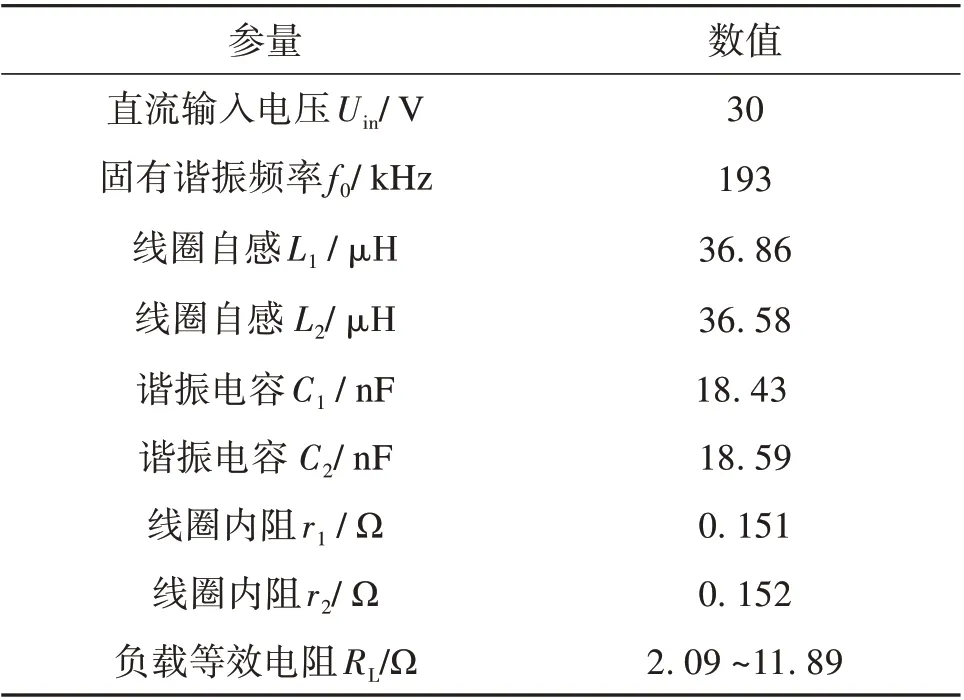
表1 實驗參數(shù)表Table 1 Experimental parameters table

圖7 PT對稱無線輸電樣機Fig.7 PT symmetric wireless transmission prototype
為提高PT 對稱無線充電系統(tǒng)的工作范圍,減少對無人機本身設備的干擾,接收線圈采用空心結構并懸掛于無人機機翼下方,方便無人機腹部支架與攝像頭穿過。同時,添加鐵氧體薄膜不僅增強了線圈磁屏蔽效果,也增大了線圈之間的耦合程度。在Maxwell中繪制線圈模型并進行磁場仿真,空心接收線圈如圖8所示,發(fā)射線圈結構與接收線圈相同。從磁場仿真結果中可以看出,空心接收線圈的磁場主要集中于線圈外圍,線圈內徑中空部分磁通密度很低,對穿過其中的無人機自身設備影響較小。
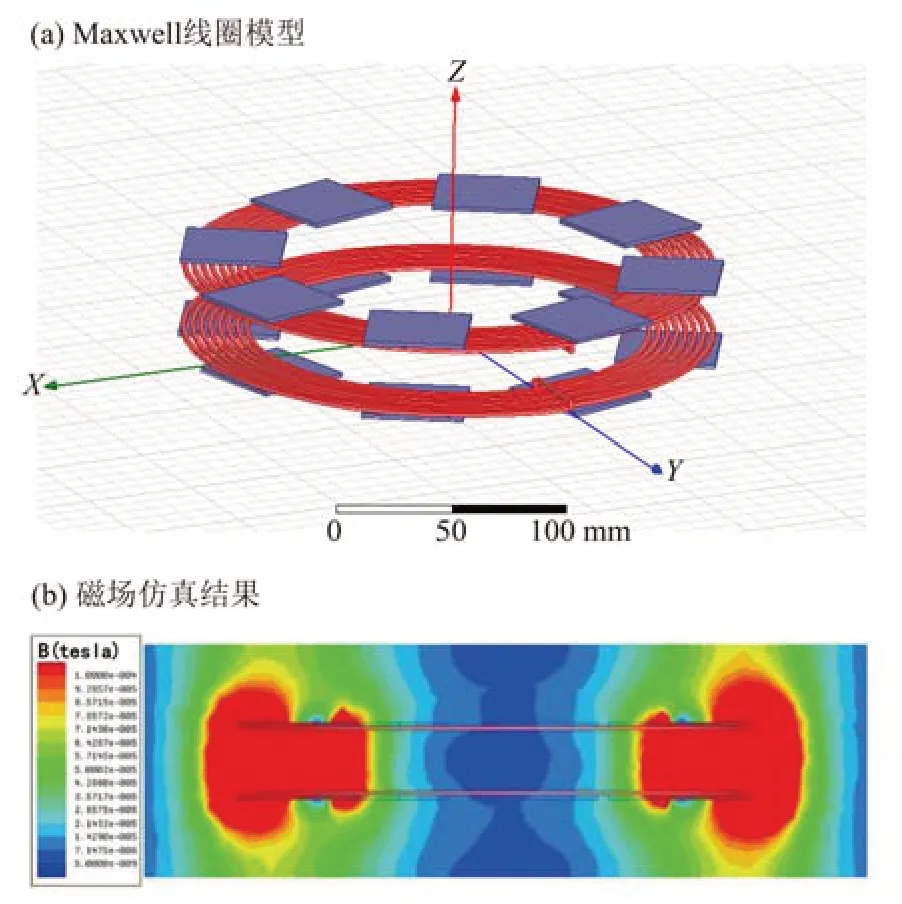
圖8 空心接收線圈Fig.8 Hollow receiving coil
3.2 結果及分析
首先對樣機在不同水平偏移距離和傳輸距離下的傳輸特性進行了研究。將負載設置為2.3 Ω,即Ro= 2.3 Ω,此時為恒流充電階段,實驗波形見圖9和圖10。
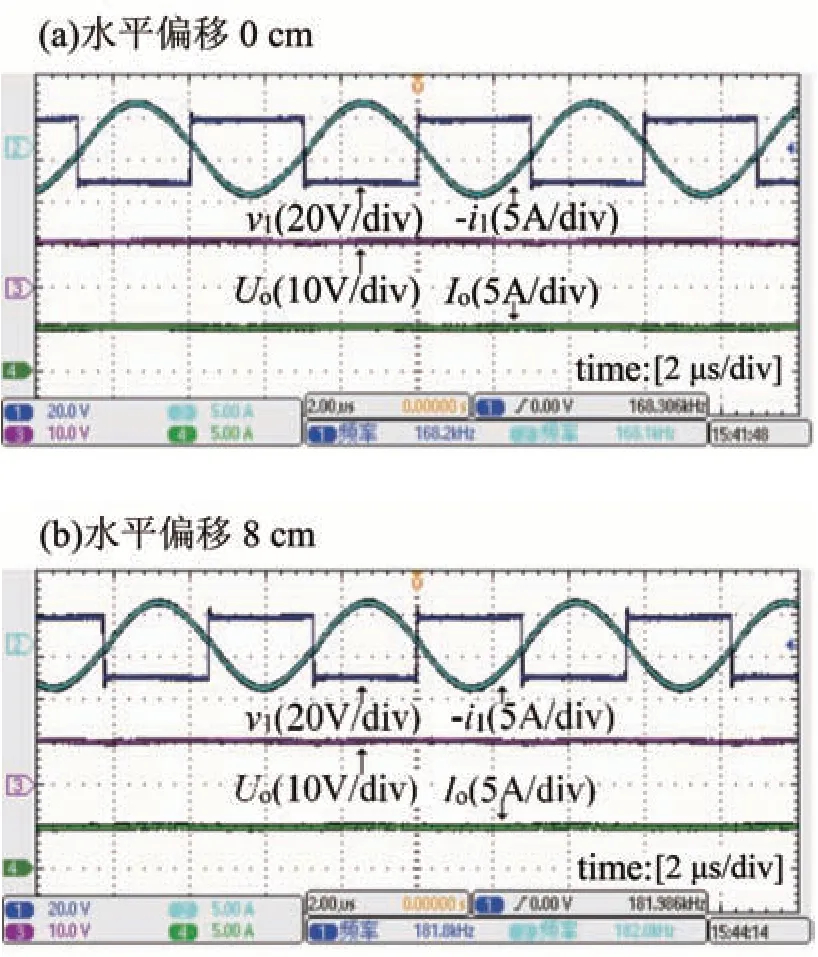
圖9 不同偏移距離的實驗波形Fig.9 Experimental waveforms of different offset distance
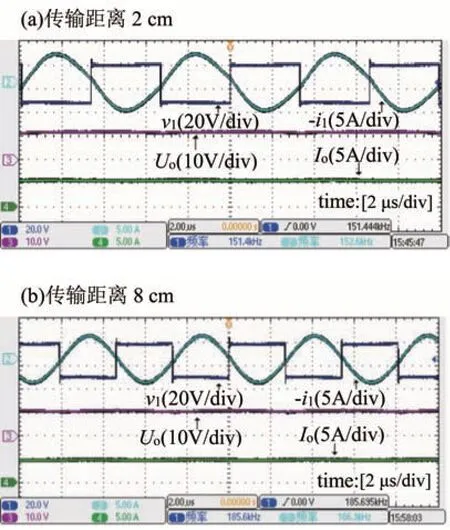
圖10 不同傳輸距離的實驗波形(偏移距離為0 cm)Fig.10 Experimental waveforms of different transmission distance(offset distance is 0 cm)
由圖可知,通過逆變器自振蕩控制,系統(tǒng)工作頻率小于固有諧振頻率,系統(tǒng)工作于低頻分支fL。在不同的傳輸距離與水平偏移距離,系統(tǒng)可以自動選擇工作頻率,當水平偏移距離由0 cm 變?yōu)? cm 時,系統(tǒng)頻率由168.2 kHz 自動調整為181.8 kHz;當傳輸距離由2 cm 變?yōu)? cm 時,系統(tǒng)頻率由151.4 kHz 自動調整為185.6 kHz。逆變器輸出電壓u1與輸出電流i1基本保持同相,輸出電流Io穩(wěn)定在參考值5.3 A,由于電子負載不變,輸出電壓Uo同樣穩(wěn)定。在傳輸距離、偏移距離變化的過程中,功率穩(wěn)定在64.6 W 左右,效率穩(wěn)定在78%左右,系統(tǒng)具有很強的抗偏移特性,實驗結果見圖11。
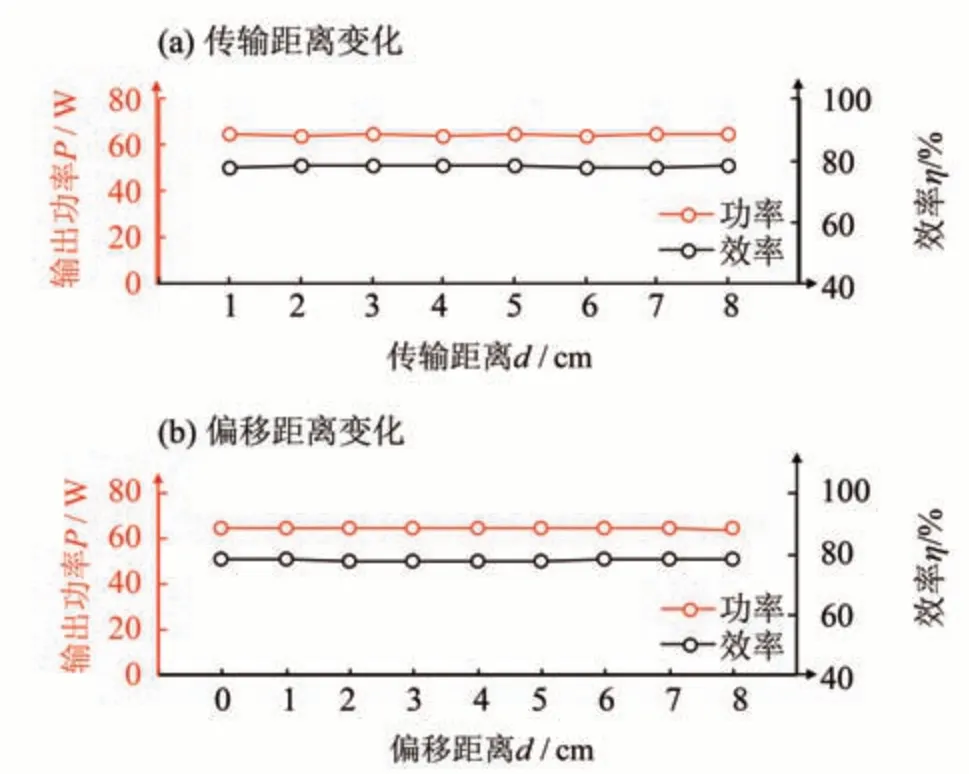
圖11 系統(tǒng)傳輸特性隨傳輸距離與偏移距離變化Fig.11 The transmission characteristics of the system vary with the transmission distance and offset distance
設定傳輸距離為4 cm,水平偏移距離為0 cm,改變負載Ro,可得恒流與恒壓階段的動態(tài)響應波形如圖12 所示。由圖12 可知,對于恒流控制階段的負載變化,輸出電流穩(wěn)定在參考值5.3 A;對于恒壓控制階段的負載變化,輸出電壓穩(wěn)定在參考值12.6 V。電池電流、電壓隨負載變化的曲線如圖13 所示,隨著負載的增加,系統(tǒng)先進行5.3 A 恒流充電,而后進入12.6 V 恒壓充電,所提出的恒流-恒壓控制策略正確有效。整機效率如圖14 所示,整機效率與負載大小有關,負載電阻越大,效率越高,效率最高接近90%。

圖12 負載切換實驗波形圖Fig.12 Load switching experiment waveform
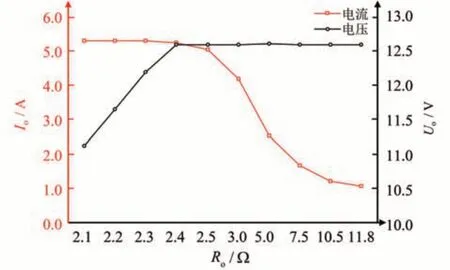
圖13 電池電流、電壓隨負載變化Fig.13 Battery current and voltage vary with load
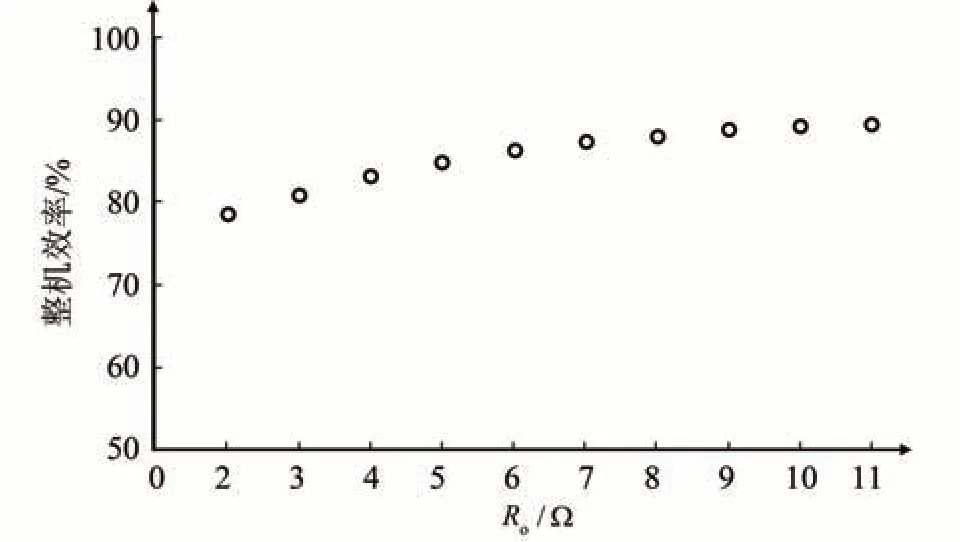
圖14 整機效率Fig.14 Overall efficiency
4 結 論
本文提出了一種基于PT 對稱原理的無線充電系統(tǒng),采用原邊控制技術實現(xiàn)對無人機鋰電池的充電控制,減輕了機載負重,控制系統(tǒng)無需原副邊通信及互感檢測,具有較強的適用性。實驗結果表明,該系統(tǒng)傳輸距離遠、抗偏移能力強,可實現(xiàn)鋰電池恒流-恒壓充電,系統(tǒng)可有效傳輸65 W充電功率,整機效率最高接近90%。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32