交流電機模型預測控制綜述
2022-12-04 11:38:20王治國鄭澤東李永東孫嘉偉周培毅
電機與控制學報 2022年11期
王治國, 鄭澤東, 李永東, 孫嘉偉, 周培毅
(1.陸軍裝甲兵學院 兵器與控制系,北京 100072; 2.清華大學 電力系統及大型發電設備安全控制和仿真國家重點實驗室,北京 100084)
0 引 言
近年來,隨著先進控制理論和技術不斷發展,線性控制、非線性控制、智能控制以及預測控制等先進控制方法在交流電機控制中得到了廣泛應用,大幅度提高了電機的控制性能。相對于其他控制方法,預測控制具有概念直觀易于理解;能夠提高系統響應速度;能夠處理含有約束條件的多變量非線性控制問題;能夠實現多目標優化;直接將變換器的開關特性考慮在模型中,容易實現直接控制等優點,從而成為交流電機控制研究的熱點和主要的發展方向。
預測控制(predictive control,PC)是指具有預測被控對象未來變化的功能,同時將預測結果用于控制,以獲得更好性能的控制方法[1]。這種方法不是建立在某種特定控制理論上的特殊控制方法,而是在啟發式控制方法的基礎上,從不同領域中發展起來的一類控制方法[2]。預測控制的突出特點是與計算機緊密結合,主要特征是使用模型來預測被控變量的未來值,并將預測值用于優化。
預測控制在工業領域和電機控制領域中的含義存在一定差別。工業領域中,很多學者都將模型預測控制(model predictive control,MPC)作為多種預測控制方法(例如:模型算法控制、動態矩陣控制等)的通用名稱[2-5]。電機控制領域中,預測控制包含無差拍控制、基于滯環的預測控制以及基于軌跡的預測控制等,而MPC則特指預測控制中的一類具體方法[6]。
過去三十年間,MPC在交流電機控制領域中取得了較大發展,在交流電機電流控制、磁鏈及轉矩控制、速度控制以及位置控制中獲得了廣泛關注和研究。盡管進展明顯,仍然存在一些需要進一步研究和解決的問題,例如:如何進一步提高控制的靜態特性,如何提高控制的穩定性和參數魯棒性,如何設計MPC的參數等。
文獻[7]是電力傳動領域中預測控制較早的綜述文獻。該文獻討論了預測控制的特點以及基于滯環和基于軌跡的預測控制方法;文獻[6]討論了電力電子領域中預測控制的分類和特點,給出了MPC的分類、原理以及應用;文獻[8-9]全面的綜述了有限控制集模型預測控制(finite control set MPC,FCS-MPC)在電力電子領域中的應用及關鍵問題,并對比了FCS-MPC與線性控制器的特性;文獻[10]針對FCS-MPC在感應電機磁鏈和轉矩控制中的應用,綜述了減小控制復雜度、設計權重系數以及提高穩態特性等方面的現狀和發展;文獻[11]綜述了電力電子和電力傳動領域中MPC的分類及應用,討論了評價函數、優化方法等MPC應用中的關鍵問題。
本文針對交流電機控制,以預測和優化方法的區別為標準,給出了MPC的詳細分類,并以此為基礎討論MPC的發展和現狀、應用中存在的主要問題以及發展趨勢。
1 模型預測控制原理
模型預測控制是通過被控對象的模型來預測被控變量未來的變化趨勢,并通過優化算法得到控制變量的一類控制方法。這類控制方法的突出特點是與計算機密切結合,采用離散形式的模型構成數字控制系統;其主要特征是在每個控制周期都使用模型來預測被控變量的未來值,并在預測的基礎上實現對控制變量的滾動優化。
1.1 模型預測
MPC對模型形式沒有嚴格的要求,只要模型能夠預測被控變量未來的變化即可。因此,傳遞函數、動態矩陣以及狀態空間等形式的模型都可以用于MPC。交流電機有成熟的參數模型,且可以方便地表示為一階微分方程組的形式,因此,常用狀態空間模型來實現交流電機的模型預測:
(1)
式中:x(k)=[x1(k)…xn(k)]T∈X?Rn為狀態變量;u(k)=[u1(k)…um(k)]T∈U?Rm為輸入變量;d(k)=[d1(k)…dg(k)]T∈D?Rg為擾動量;y(k)=[y1(k)…yp(k)]T∈Y?Rp為輸出變量;Ad、Bd、Ed以及Cd分別為系統矩陣、輸入矩陣、擾動輸入矩陣以及輸出矩陣。
以k為初始時刻,以x(k)為系統變量初始值,由式(1)可得被控變量在k+l時刻的模型預測值為
(2)
針對某個控制變量序列
U(k)={u(k),u(k+1),…,u(k+Nc-1)},
(3)
利用式(2)進行迭代計算,可以得到與控制變量對應的預測序列
Y(k)={y(k+1|k),y(k+2|k),…,
y(k+Np|k)}。
(4)
式中:Nc為控制域長度;當k>Nc時,u(k)=0;Np為預測域長度,通常Np≥Nc。
1.2 評價函數
MPC通常利用評價函數實現對控制變量的優化。MPC對評價函數的形式沒有嚴格的要求。對于連續控制集模型預測控制,可以采用1-范數、2-范數或∞-范數等形式的評價函數;對于采用枚舉法優化的有限控制集模型預測控制,評價函數的形式可以更加靈活,與被控變量有非負數量關系的性能指標都可以加入評價函數進行優化[9]。2-范數形式的評價函數為

(5)
式中:l=1,2,…,Np;h=0,1,2,…,Nc;Ql為k+l時刻對輸出變量誤差的權重系數矩陣;Rh為k+h時刻對控制變量的權重系數矩陣。
求解使評價函數J取最小值的有約束優化問題可以得到k時刻的最優控制序列為
U*(k)={u*(k),u*(k+1),…,
u*(k+Nc-1)}。
(6)
1.3 滾動優化
盡管式(6)給出了k時刻控制域Nc內所有控制變量的最優解,但應用中只取最優控制序列中與k時刻對應的元素作為實際使用的控制變量,即
u(k)=u*(k)。
(7)
在k+1控制周期,MPC會重復上面的預測和優化過程,得到新的控制變量最優解序列U*(k+1)以及實際的控制變量u*(k+1)。由上面的分析可以看出,滾動優化不是通過單次優化得到最優解序列,并將其全部用于控制,而是在每個控制周期都進行優化計算,并將最優解序列中與當前控制周期對應的部分作為實際的控制變量。模型預測控制的原理如圖1所示。
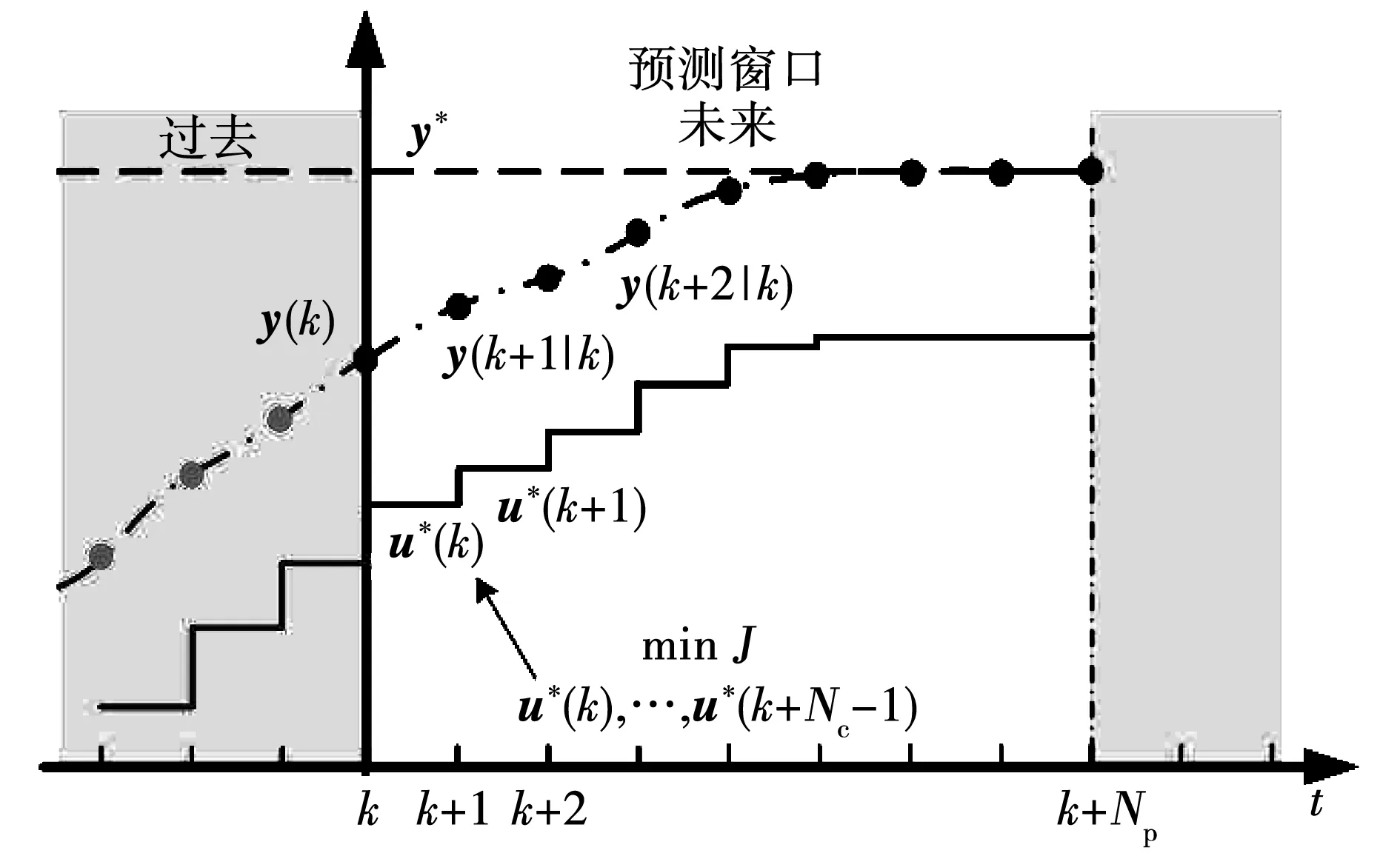
圖1 模型預測控制原理
2 交流電機MPC的分類與發展
交流電機控制中,MPC根據控制變量取值范圍的特點可以分為連續控制集模型預測控制(continuous control set MPC,CCS-MPC)[12]和FCS-MPC[13]兩種基本類型。FCS-MPC可根據控制目標直接確定用于控制功率半導體器件的開關量,不需要使用調制技術,因此又被稱為直接模型預測控制(direct MPC,DMPC)[14-15]。CCS-MPC在連續域內計算控制變量的最優解,其輸出是連續變量,需要使用調制技術。
2.1 有限控制集模型預測控制
FCS-MPC充分考慮了電力電子變換器采用離散、有限的開關狀態實現控制的特點,針對這些開關狀態實現預測,然后利用評價函數對這些預測結果進行優化,最終選擇使評價函數取值最小的開關狀態作為實際的控制變量。FCS-MPC的預測和優化充分結合了電力電子變換器的特點,可以直接得到最優開關狀態,去掉了調制環節,簡化了控制算法。此外,這類控制方法無需考慮評價函數的解析求解問題,優化目標也更為靈活。因為FCS-MPC具有上述優點,所以在交流電機控制中得到較多的關注和應用。
自C.Attaianese于1993年針對感應電機提出電流預測控制算法[16]開始,FCS-MPC已有近三十年的發展歷史。FCS-MPC發展早期主要研究如何利用模型和枚舉等基本的預測和優化方法實現對交流電機的控制。隨著研究不斷深入,FCS-MPC應用中存在的一些基本問題得到了較為系統的研究,例如:滯后補償、長域預測、參數設計、參數魯棒性分析和設計等。同時,FCS-MPC的應用范圍也得到了進一步擴展,例如:電機存在故障情況下的控制[17]、多目標優化[18]等。
FCS-MPC的分類標準較多,文獻[9]以變換器拓撲結構為標準實現了對FCS-MPC的分類(三電平中點嵌位、有源前端整流器、級聯H橋逆變器、飛跨電容逆變器、矩陣變換器等),并討論了其在電力電子領域中的應用。文獻[19-20]以應用領域為標準,對FCS-MPC進行了分類和綜述(并網變換器、帶RL負載的逆變器、帶LC濾波器的逆變器、傳動逆變器等)。文獻[11]則根據優化結果的開關矢量數量將FCS-MPC分為優化開關矢量MPC(optimal switching vector MPC,OSV-MPC)和優化開關序列MPC(optimal switching sequence MPC,OSS-MPC)兩種類型。
本文將FCS-MPC預測和優化方法的區別作為分類標準,討論FCS-MPC在交流電機控制領域的歷史發展和現狀,具體分類結果如圖2所示。
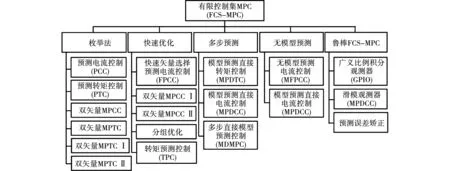
圖2 交流電機中FCS-MPC的分類
2.1.1 枚舉法預測和優化
枚舉法是FCS-MPC最常用的預測和優化方法。2004年,J.Rodríguez針對三相電壓型逆變器提出了預測電流控制(predictive current control, PCC)[21],其原理如圖3所示。PCC將所有可行的開關矢量代入靜止坐標系下的模型,以預測逆變器的輸出電流,并通過評價函數找到使電流誤差最小的開關矢量作為實際的控制變量。文獻[22-25]分別針對三相電機、雙三相電機和五相電機,采用一步預測以及枚舉法實現了電流控制;文獻[26-28]通過枚舉法實現了轉矩和定子磁鏈的控制,這類方法又稱為預測轉矩控制(predictive torque control,PTC)或模型預測轉矩控制(model predictive torque control,MPTC)。
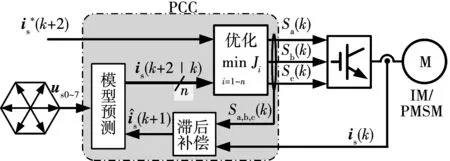
圖3 PCC原理
上述傳統PCC和MPTC僅采用枚舉法對基本開關矢量預測和優化,單個采樣周期中僅施加一個固定的開關狀態,會導致被控變量存在較大的紋波。為了解決這個問題,張永昌等通過在采樣周期中增加零矢量,減小了PCC電流的脈動[29]以及MPTC的磁鏈和轉矩脈動[30],形成了雙矢量MPCC[31]和雙矢量MPTC[32]。傳統的雙矢量MPCC和MPTC均首先利用枚舉法得到最優矢量,然后針對最優矢量計算占空比。傳統雙矢量MPCC通常根據“電流誤差最小”的優化目標來計算占空比[31,33],文獻[34]還提出采用模糊控制確定占空比的方法。傳統雙矢量MPTC計算占空比的方法較多,例如:使轉矩在采樣時刻與參考值相等的方法、使平均轉矩與參考值相等的方法以及使轉矩脈動最小的方法等[35]。
傳統雙矢量MPTC分開確定最優矢量和占空比的方法導致最終得到的雙矢量組合可能并非最優解[33](第一步用枚舉法選擇最優矢量只能保證整個采樣周期都用這個矢量是最優的,但在插入零矢量并得到組合矢量后,就不能保證組合矢量最優)。為了解決這個問題,張永昌等對MPTC進行了改進,先計算各非零開關矢量的占空比,然后將非零矢量及其作用時間作為整體,使用枚舉法預測并優化,從而形成雙矢量MPTC I算法[30]。將雙矢量中的第二矢量放寬到可取任意基本矢量,即形成雙矢量MPTC II算法[36]。
枚舉法的最大優點是原理簡單。這種方法在電路拓撲結構簡單時容易實現,但當電路結構復雜(例如:多電平變換器、矩陣變換器等)時,開關狀態的數量將急劇增加,導致枚舉法的計算量急劇增大,使預測和優化無法實現。此外,隨著預測域長度的增加,枚舉法的計算量也會迅速增大,從而導致枚舉法很難直接應用于長預測域控制。
2.1.2 快速優化
計算量大是制約枚舉法應用的主要問題。通過減少枚舉次數來降低計算量是解決這個問題的主要思路,從而形成了一些快速優化算法。
自1993年李永東等開始研究轉矩預測控制,提出了利用新型電壓矢量表計算定子電壓矢量和定子磁鏈矢量間夾角的方法,實現了雙矢量快速優化轉矩預測控制[37-39]。張永昌等采用類似無差拍控制的思路,提出了基于快速矢量選擇的預測電流控制(fast predictive current control,FPCC)方法[40]。FPCC先根據電流參考值計算出理想電壓參考矢量,然后利用基本電壓矢量與理想參考電壓矢量之間的誤差實現優化。該方法先通過參考電壓矢量所在的扇區選擇非零矢量,然后與零矢量對比,經過兩次預測就可以完成優化,不需要計算所有基本電壓矢量與參考電壓矢量間的距離,其原理如圖4所示。
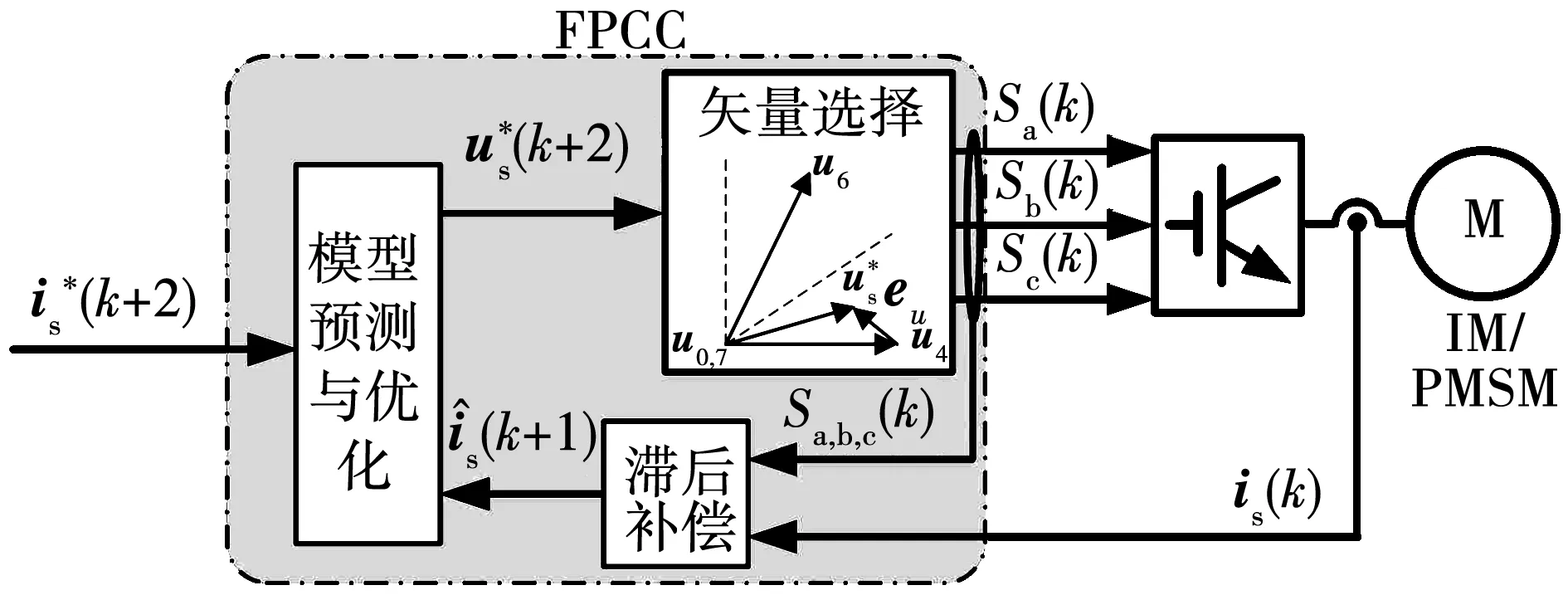
圖4 FPCC原理
傳統雙矢量MPCC也存在雙矢量組合并非最優解的問題。文獻[33,41]先采用類似無差拍控制的方法得到參考矢量,然后通過使非零矢量與參考矢量之間的誤差最小化來計算占空比,從而形成雙矢量MPCC I算法。為了進一步減小電流紋波,將雙矢量中的第二矢量放寬到可以取任意基本矢量,即可構成雙矢量MPCC II算法[42]。雙矢量MPCC I算法和雙矢量MPCC II算法均采用類似無差拍的預測和優化方法,預測和優化的計算量明顯下降。采用這種預測和優化算法雖然可以減少計算量,實現快速優化,但也存在無差拍控制固有的問題,即對模型參數敏感。
當變換器采用多電平拓撲結構時,開關數量急劇增加,這時必須使用快速優化算法才能實現FCS-MPC。文獻[43]針對背靠背模塊化多電平變換器,采用分組優化的方法明顯較少了計算量,提高了計算速度。
2.1.3 多步預測
長預測域控制是FCS-MPC在不降低動態特性的條件下,提高靜態特性和穩定性的有效方法[44]。但常用的枚舉法計算量與預測域長度成指數關系,增大預測域長度將導致計算量急劇上升。針對該問題,T.Geyer在大功率中壓電機控制中,提出了基于外推策略的多步預測控制方法[45]。
外推策略定義了開關域Ns和預測域Np,Ns長度一定而Np長度可變,且Ns≤Np。該策略的基本思想是先在Ns中尋找可以讓被控變量處于給定滯環范圍內的候選開關序列,然后通過評價函數對這些候選序列進行優化,最終得到能夠使被控變量誤差最小且滿足一定優化指標的最優開關序列。采用該策略的方法主要包括:模型預測直接轉矩控制(model predictive direct torque control,MPDTC)[46-47]和模型預測直接電流控制(model predictive direct current control,MPDCC)[48-49]。文獻[50]針對五電平有源中點嵌位電路,利用MPDTC實現了對中壓三相感應電機轉矩和磁鏈的控制,并對開關頻率、中點電壓波動等指標進行了優化。文獻[51]針對模塊化多電平變換器,利用MPDCC實現了對負載電流的控制,并對開關頻率、電容電壓波動以及環流進行了優化。為了提高MPDTC和MPDCC方法的計算效率,文獻[52]采用分支定界法實現了對Ns域內開關序列的搜索。此外,MPDTC和MPDCC還會遇到優化問題不可解的情況,即死鎖。文獻[53]討論了避免死鎖的方法。MPDCC原理如圖5所示。

圖5 MPDCC原理
為了進一步提高長域預測的計算效率,T.Geyer提出了多步直接模型預測控制[44,54-55]。該方法利用球解碼算法大幅減小了長域預測的計算量。多步直接模型預測控制的評價函數由被控變量的誤差和開關函數構成,這種類型的評價函數需要通過求解整數二次規劃(quadratic programming,QP)問題實現優化。球解碼算法通過將整數QP問題描述為截斷整數最小二乘問題,基于分支定界法,以遞歸形式實現優化。
2.1.4 無模型預測
MPC通常需要利用精確的參數模型實現預測和優化,其主要不足是計算量較大,對模型和參數依賴性較強。
Cheng-Kai Lin等利用FCS-MPC控制頻率高的特點,提出了無模型預測電流控制(model-free predictive current control,MFPCC)[56]。當控制頻率較高且當前控制周期中的開關矢量不變時,可以認為當前控制周期中的電流是線性變化的,因此可以通過在一個控制周期中測量兩次電流來計算其間的電流變化。其他開關矢量在一個控制周期中產生的電流變化可以用最近的歷史值近似。這樣,就可以在不使用電機參數模型的條件下,得到當前控制周期中所有開關矢量產生的電流變化,從而可以利用枚舉法實現優化,大大提高了對模型和參數的魯棒性。這種方法的主要不足是:需要在一個控制周期內實現兩次電流采樣,而且要精確控制兩次電流采樣的時刻,實現有一定難度。MFPCC原理如圖6所示。
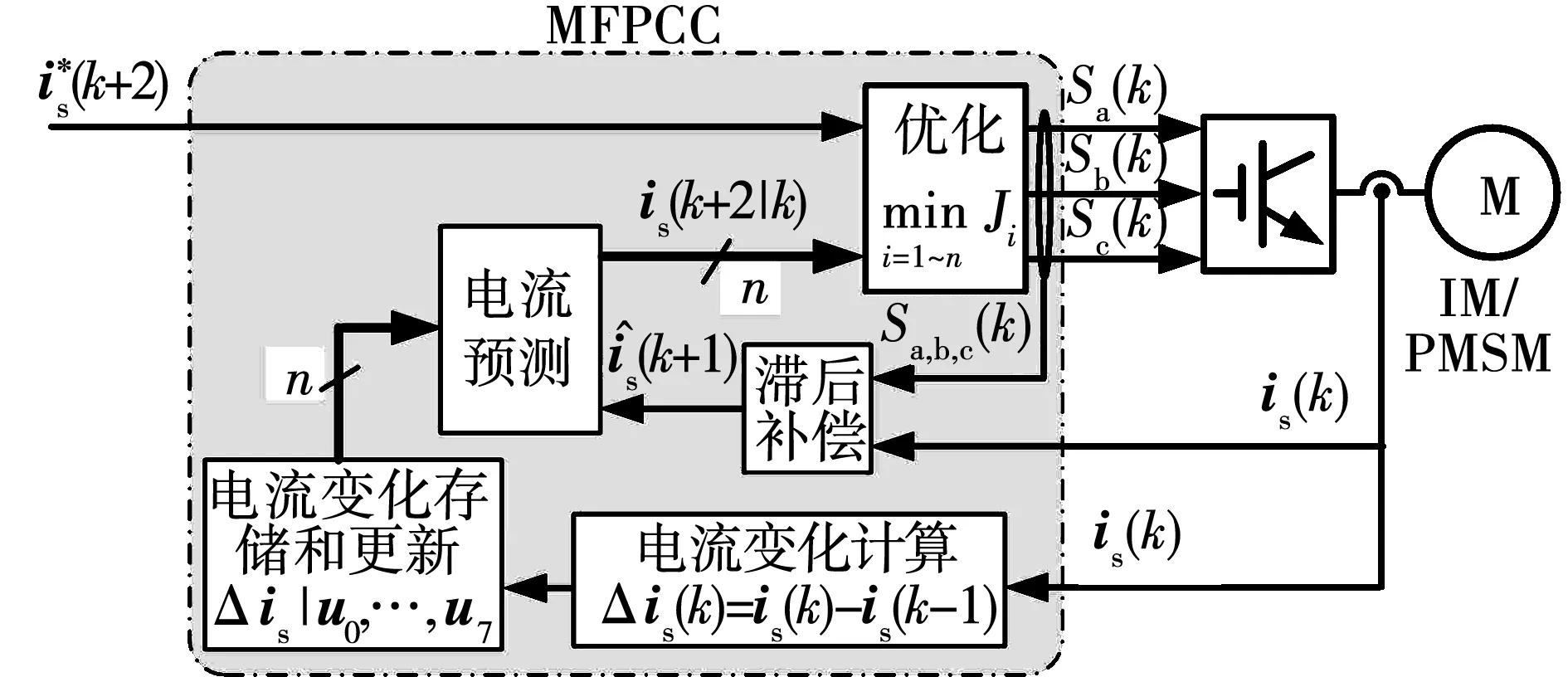
圖6 MFPCC原理
針對上述無模型預測電流控制方法存在的問題,張虎和張永昌等提出了一種只需要一次電流采樣的無模型預測電流控制方法[57]。該方法利用相鄰兩個控制周期的電流采樣值實現對電流變化的計算,然后按照MFPCC的思路實現優化和控制。
2.1.5 魯棒FCS-MPC
FCS-MPC針對有限的開關矢量完成優化,提高了控制的魯棒性,但該方法仍然會受到模型參數誤差的影響。提高FCS-MPC的參數魯棒性已經成為交流電機控制領域研究的熱點問題[11]。
文獻[58]采用廣義比例積分觀測器(generalized proportional integral observer,GPIO)估計擾動,提高了感應電機PCC的魯棒性。文獻[59]針對感應電機,采用全階滑模觀測器和降階滑模觀測器,分別估計電流、磁鏈以及轉速,實現了魯棒PTC控制。文獻[60]針對永磁同步電機(permanent magnet synchronous machines,PMSM),采用預測誤差校正的方法提高了PCC的魯棒性。該方法認為每個基本矢量預測誤差在短時間內變化都不大,把這些基本矢量最近的誤差都記錄下來,就可以實現補償。但這個方法無法從原理上消除因參數誤差導致的靜態誤差。采用GPIO的PCC原理如圖7所示。
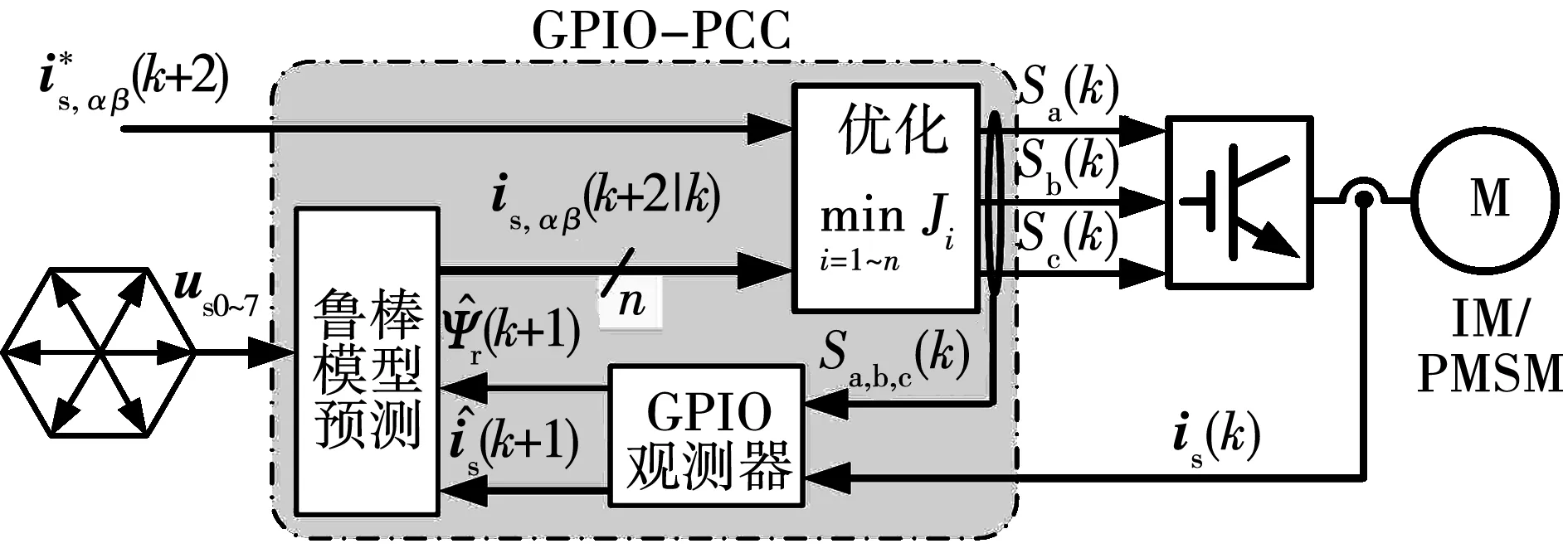
圖7 采用GPIO的PCC原理
2.2 連續控制集模型預測控制
以預測模型和優化方法的區別作為標準,可以得到CCS-MPC的分類如圖8所示。下文根據該分類說明CCS-MPC在交流電機控制領域的歷史發展和現狀。
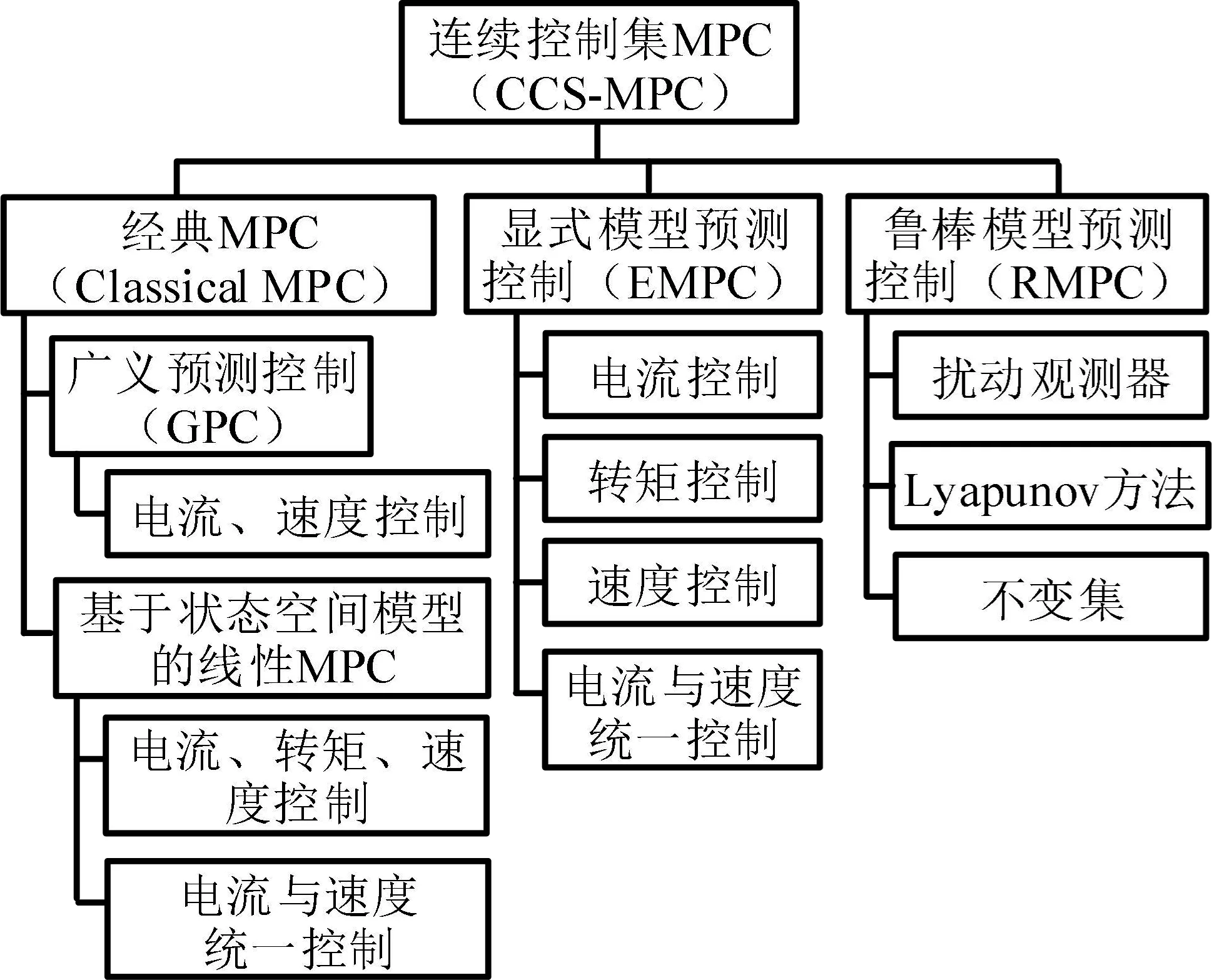
圖8 交流電機中CCS-MPC的分類
2.2.1 經典MPC
用于交流電機控制的經典MPC主要包括廣義預測控制(generalized predictive control,GPC)和基于狀態空間模型的線性MPC。
Clarke等在1987年提出了GPC[61],該方法是一種較早用于交流電機控制的模型預測控制方法。1995年,P. Boucher利用GPC實現了對無刷直流電機的速度控制[62];1996年,D.Dumur利用GPC實現了對感應電機的雙環控制[63]。此后,GPC還被用于永磁同步電機電流控制[64]、感應電機位置控制[65]以及永磁同步電機的位置控制[66]等。采用GPC的感應電機電流控制原理如圖9所示。

圖9 采用GPC的電流控制原理
CRARMA模型多用于SISO系統,處理MIMO系統控制問題時的形式較為復雜,應用有一定難度[67];此外,MPC是一種典型的時域控制方法,狀態空間模型相對傳遞函數模型更容易理解和應用。因此,基于狀態空間模型的線性MPC在交流電機控制中得到了更多應用。這種方法常采用電機的狀態空間模型和二次型評價函數實現預測和滾動優化。不考慮約束條件時,該方法可以通過離線求解QP問題得到控制變量的解析最優解;考慮約束條件時,則需要利用有效集等方法,在線求解包含約束條件的優化問題。
1997年,K. Hentabli等提出了利用基于狀態空間模型的線性MPC控制三相感應電機電流和轉速的方法,并給出了仿真結果[68]。此后,該方法還被用于實現感應電機電流控制[69-71]、感應電機的速度控制[72]、具有弱磁控制特性的永磁同步電機電流控制[73]、永磁同步電機的電流與速度統一控制[74]等。基于狀態空間模型的線性MPC電流控制原理如圖10所示。
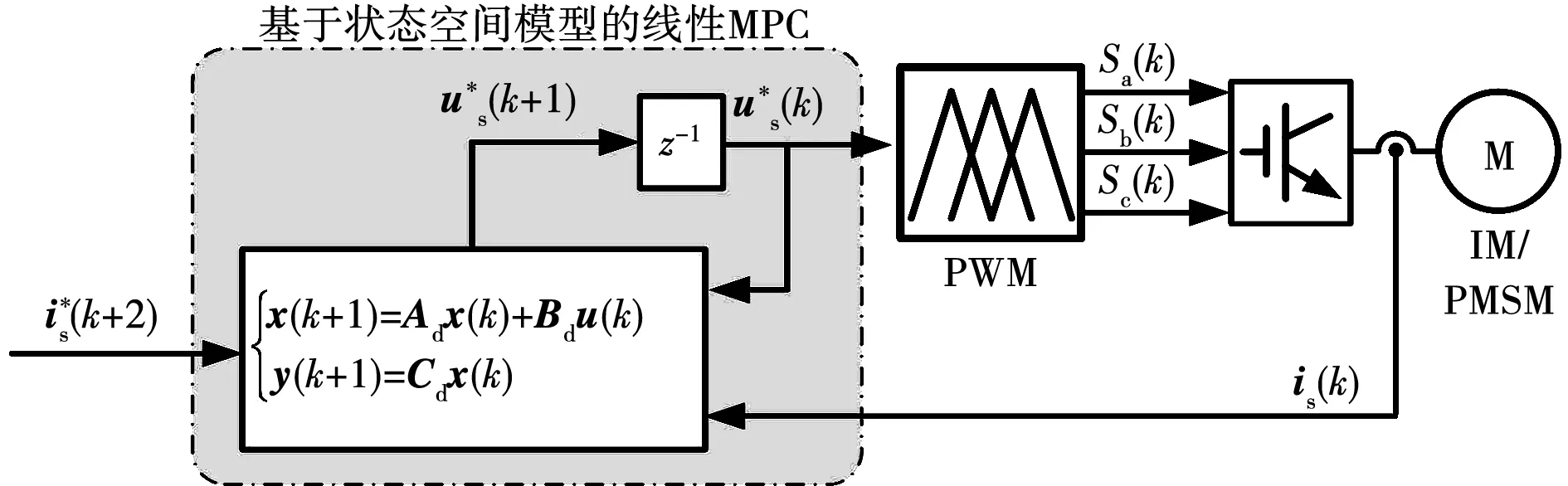
圖10 基于狀態空間模型的線性MPC電流控制原理
上面給出了一些線性MPC在交流電機控制領域的典型應用。此外,還有一些將線性MPC與其他方法組合起來,構成混合控制方法的特殊應用。T.Geyer針對中壓感應電機大功率傳動,將線性MPC與優化脈沖模式(optimal pulse patterns,OPPs)結合在一起,提出了模型預測脈沖模式控制(model predictive pulse pattern control,MP3C)[75]。該方法采用定子磁鏈誤差以及最優開關時刻修正值構成評價函數,實現了對OPPs開關時刻修正值的優化,有效控制了定子電流的總諧波畸變率(total harmonics distortion,THD),并實現了對感應電機的轉矩和磁鏈控制。文獻[76]將MP3C用于五電平三相逆變電路,實現了對中壓感應電機的轉矩和磁鏈控制。
線性MPC常采用真實值模型實現預測,因此容易受到模型參數誤差的影響,導致控制性能下降(例如產生靜態誤差等)。同樣是因為容易受到參數誤差影響的原因,線性MPC不能簡單采用兩步預測實現滯后補償,否則會使其參數魯棒性進一步下降。此外,考慮約束條件時的在線優化算法比較復雜,這也是線性MPC應用中存在的主要問題。
2.2.2 顯式模型預測控制
為了解決線性MPC在線優化算法復雜、計算量大的問題, A.Bemporad和M.Morari等在2000年提出了顯式模型預測控制(explicit model predictive control,EMPC)[77]。該方法實現了線性定常系統MPC優化的準離線計算。與傳統求解QP問題的算法不同,EMPC將狀態變量看作參數向量,從而將QP問題轉化為多參數二次規劃問題(multiparametric-QP,mp-QP),通過分段仿射(piecewise affine,PWA)變換得到顯式狀態反饋解。
2005年,A.Linder和R.Kennel等將EMPC用于感應電機電流控制[78]。其后,EMPC還被用于PMSM的電流控制[79]、PMSM的電流和轉速雙環控制[80]、感應電機電流控制[81]、感應電機轉矩和轉速雙環控制[82]、雙質量驅動系統的機械共振抑制[83]等。采用EMPC的感應電機電流控制原理如圖11所示。
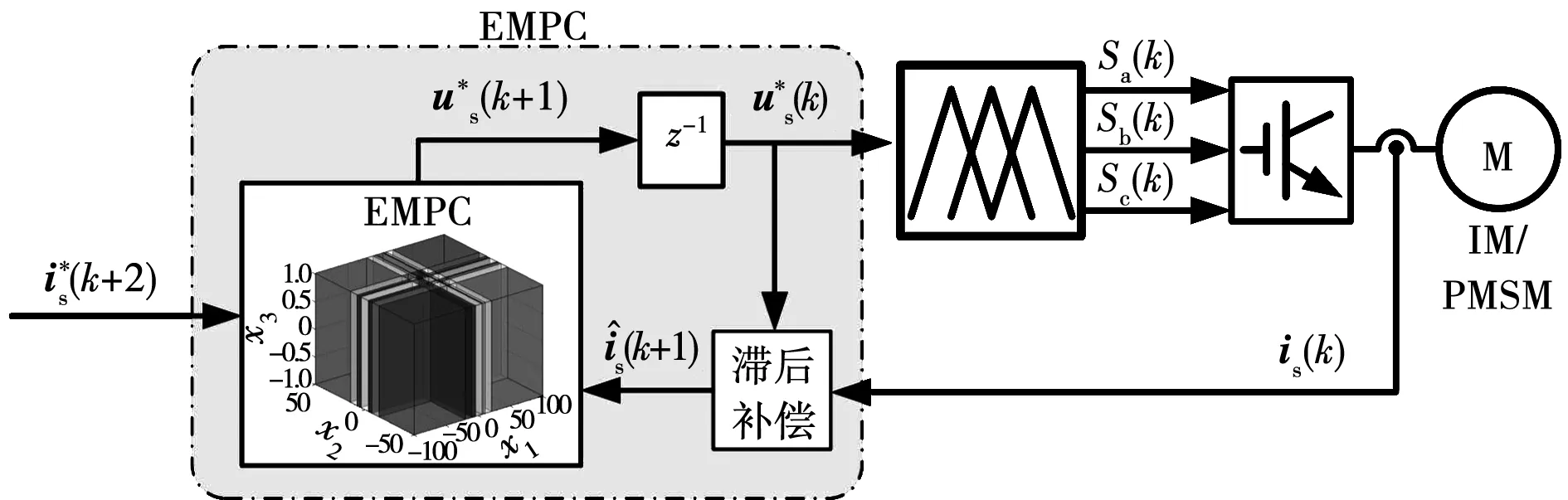
圖11 采用EMPC的感應電機電流控制原理
EMPC最大的優勢是可以離線完成絕大部分QP求解工作,即根據約束條件以及MPC的參數劃分可行域,并針對不同的區域確定狀態反饋控制律。因此,EMPC通常用于線性定常系統控制。當遇到時變系統時,EMPC會遇到重新劃分區域并確定反饋控制律的問題。此外,當預測域較長時,EMPC還會遇到區域劃分數量太多,實現困難的問題。
2.2.3 魯棒模型預測控制
傳統線性MPC及EMPC沒有考慮參數誤差和擾動對控制的影響,參數魯棒性不強。因此,如何提高控制的魯棒性就成為交流電機控制領域CCS-MPC研究的關鍵問題。理論研究領域中,提高CCS-MPC穩定性的常用方法包括:min-max優化、魯棒收縮約束、魯棒終端不變集、閉環預測[84]等。CCS-MPC實現無偏差控制的主要方法包括擾動觀測器以及采用速度形式的模型等[85]。
文獻[86]采用自適應擾動觀測器實現了感應電機電流的魯棒MPC(robust MPC,RMPC)控制;文獻[87]采用增量觀測器和增量模型提高了感應電機電流控制的魯棒性;文獻[88]針對PMSM,采用增廣觀測器估計電流和因電感誤差導致的電壓誤差,實現了魯棒電流預測控制;文獻[89]針對PMSM,采用Lyapunov方法和控制不變集,提高了CCS-MPC的魯棒穩定性;文獻[90]針對PMSM,采用參數在線辨識的方法減小了電流控制的靜態誤差,但該方法需要針對不同參數設計相應的辨識方法,實現比較復雜,而且無法從原理上消除控制的靜態誤差。基于擾動觀測器的魯棒模型預測控制原理如圖12所示。
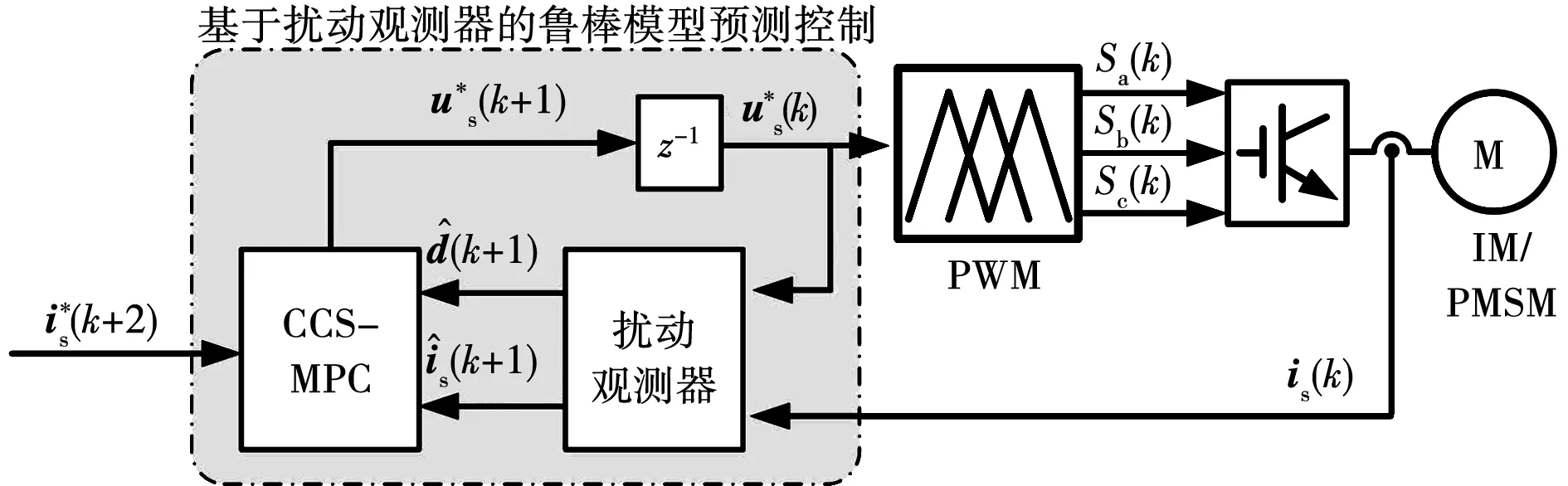
圖12 基于擾動觀測器的魯棒模型預測控制原理
表1從控制能力、計算量、性能等方面給出了FCS-MPC與CCS-MPC的比較。此外,文獻[91-95]也給出了不同類型MPC間的比較,文獻[96]討論了不同類型MPC之間的聯系。
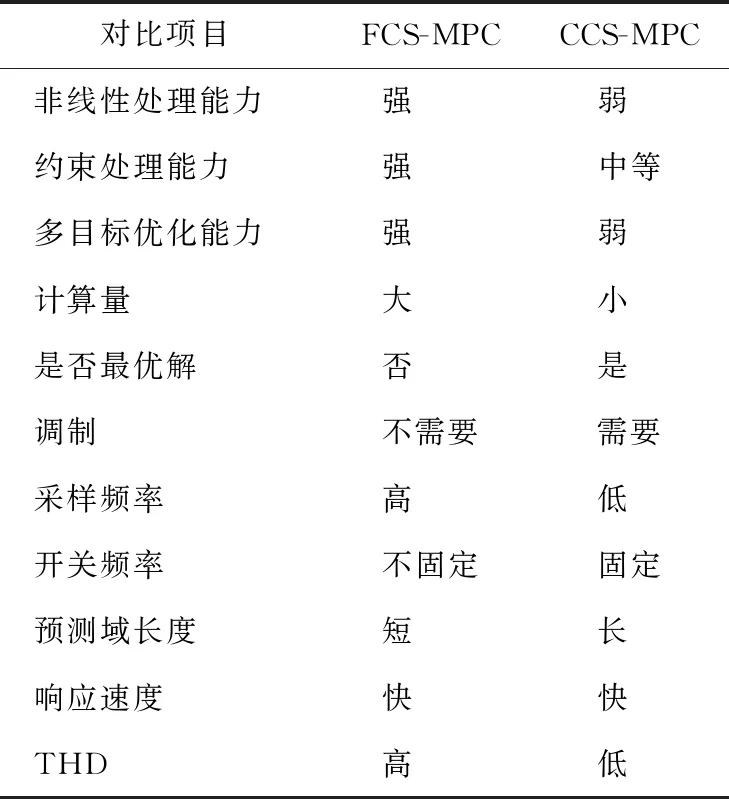
表1 FCS-MPC與CCS-MPC特性對比
3 應用中的關鍵問題及解決方法
近三十年間,MPC在交流電機控制中取得了較大進展,建模方法、在線優化方法等不斷完善,并已經在電流控制、磁鏈及轉矩控制、速度控制以及位置控制中獲得了較多研究和應用。盡管進展明顯,但MPC應用中仍然存在一些問題需要進一步研究和完善,例如:如何進一步提高控制的靜態特性,消除控制偏差;如何更好地解決數字控制系統的滯后問題,提出性能更好的滯后補償方法;如何提高控制的參數魯棒性;如何設計MPC的參數(權重系數、預測域長度以及控制域長度)等[11,20]。
3.1 無偏差控制
MPC以模型為基礎實現預測和優化,建模誤差、模型參數誤差、擾動等因素都會導致預測產生誤差,進而影響MPC的控制性能,產生控制偏差等問題[97]。
MPC理論研究領域中,無偏差控制問題得到了較好的研究,開環估計補償、擾動觀測器以及增量式增廣模型方法是MPC常用的無偏差控制方法[85]。交流電機控制領域中,由于多數MPC控制方法都直接采用電機的真實模型實現預測和控制,并沒有采用消除預測及控制誤差的措施和方法,該問題還需要進一步研究[11]。
文獻[69]和文獻[98]分別采用開環估計補償方法實現了對三相感應電機的電流控制和弱磁控制。該方法容易實現,可以在一定程度上減小MPC的控制誤差,但無法從原理上消除控制偏差[97]。此外,該方法需要單獨設計補償矩陣,但補償矩陣還沒有成熟的設計方法。
擾動觀測器是MPC消除控制偏差的常用方法,但在交流電機控制領域的應用還不常見。文獻[99]采用擾動觀測器實現了對三相電壓型逆變器的控制。交流電機控制領域中應用時,由于需要增廣狀態變量,該方法存在模型階數高、計算量大以及設計和實現復雜等問題。
此外,采用增廣模型也可實現無偏差控制。文獻[85]給出了其與擾動觀測器方法的等價關系。該方法已經應用于三相感應電機的電流控制[71]以及三相永磁同步電機的電流控制[100]。由于采用增廣模型,該方法也存在模型階數高、計算量大以及設計和實現復雜的問題。
除上面討論的3種方法以外,交流電機控制中的MPC還可以采用一些其他方法實現無偏差控制。文獻[90]采用參數在線辨識的方法實現了三相感應電機的無偏差電流控制;文獻[101]針對PMSM的無差拍電流控制,采用參數在線自適應調整的方法,在磁鏈參數準確時,消除了因電感誤差而導致的靜態誤差。這類方法理論上可以消除參數誤差對預測的影響,但不同的參數需要采用不同的方法辨識,導致辨識算法復雜、實現困難。此外,這類方法還難以保證多個參數均能準確在線辨識。文獻[102]針對永磁同步電機速度控制,采用一個獨立的積分器實現無偏差控制。這種方法容易實現,但會降低系統的動態特性,而且破壞了MPC的統一結構。
3.2 滯后與補償
交流電機數字控制系統常采用滯后一拍的控制方式,以解決采樣、計算以及占空比更新等環節時間延遲導致的最大占空比受限問題[103-104]。采用滯后一拍的控制方式時,反饋信號的采樣過程與控制變量的計算和實現過程并不同步,從而導致MPC出現超調和振蕩,嚴重時會影響系統的穩定性[105]。
多采樣方法和基于模型的預測補償方法是交流電機控制領域中兩種常用的滯后補償方法。文獻[106]針對PMSM無差拍電流控制,通過單個開關周期中的兩次電流采樣和兩次占空比更新,減小了滯后的影響,并擴展了電流環帶寬。該方法實現簡單,但無法從原理上消除一拍滯后產生的影響。文獻[107]針對PMSM直接轉矩控制,在單個開關周期內兩次采樣,然后利用線性插值的方法得到被控變量的預測值,實現了對一拍滯后的補償。該方法原理簡單,計算量小,但會明顯減小控制算法的有效運行時間[108]。
相對于多采樣方法,基于模型的預測補償方法理論上可以完全消除滯后帶來的影響且計算量不大,在交流電機控制領域的MPC中應用較多[47,109-110]。預測補償方法主要包括開環補償和閉環補償兩種類型。開環補償常使用電機真實值模型直接計算被控變量在下一個控制周期的值,并將其作為預測的初始值[111-113]。該方法原理簡單,常用于FCS-MPC,其主要問題是容易受到電機參數誤差等因素的影響而產生補償誤差[114]。閉環補償則采用觀測器得到被控變量的觀測值,并將其作為預測的初始值[115-116]。采用傳統觀測器補償一拍滯后時,同樣會受到電機參數誤差等因素的影響,導致MPC產生控制偏差[114]。采用增量觀測器[87]、PI觀測器[58]、擴張觀測器[88]或擾動觀測器[86]均可以克服傳統觀測器存在的問題,提高滯后補償的魯棒性。
3.3 參數設計
設計MPC時,需要確定的參數較多,主要包括預測域長度、控制域長度、評價函數的形式、權重系數等。
1)預測域長度和控制域長度。
對于采用枚舉法實現優化的FCS-MPC,計算量會隨著預測域長度Np增加而迅速增加。因此,FCS-MPC通常采用1步或2步預測,較難實現長預測域控制。但也有例外,T.Geyer用外插的方法實現了長域預測,這時就要合理選擇預測域長度[44,117]。與FCS-MPC不同,不考慮約束條件時,CCS-MPC可以得到解析形式的最優解,比較容易實現長預測域控制。
目前,還沒有通用的預測域長度設計方法,常見的預測域長度設計方法包括:經驗法[118]、基于事件的預測域長度設計方法[45,119]等。應用中,可以根據被控對象動態過程的時間長度來選擇預測域長度。預測域并非越長越好,而是應該根據控制指標來綜合選擇。響應速度較快時,預測域長度可以較小。
控制域長度Nc應該包含控制變量會產生變化的所有時域范圍。該參數也沒有成熟、通用的理論設計方法,應用中多依靠經驗來確定取值。預測域較短時,可使Nc=Np;預測域較長時,為了較小計算量,可取Nc 2)評價函數選擇。 由于FCS-MPC的評價函數僅是計算開關狀態對被控變量作用效果的工具,不涉及最優控制的分析和求解,選擇評價函數的形式靈活多樣,可以通過將多種優化目標包含在評價函數中實現多目標優化。FCS-MPC還可以通過變化評價函數形式的方法來降低權重系數的設計難度。 CCS-MPC則常采用2-范數形式的評價函數,以便實現最優控制的分析和求解。CCS-MPC較難實現多目標優化,其主要原因是加入多種優化目標后會導致最優控制難以分析和求解。 3)權重系數。 權重系數對MPC的動態性能(超調、振蕩以及調節時間等)有明顯影響。因此,確定權重系數的取值是MPC設計的主要任務。目前,權重系數通常需要憑借經驗確定,沒有成熟、統一的設計方法[11]。 啟發式算法是確定權重系數最常用的方法。該算法只是一類解決問題的思路,而不是一種明確、通用的方法。這種算法基于經驗,先針對具體應用定義出性能指標,然后通過大量的仿真和實驗來尋找近似最優解[11,120]。該方法的特點是只能找到近似最優解,且無法得到近似解與實際最優解之間的偏差。這種方法的主要問題是仿真和實驗的工作量大。 FCS-MPC的評價函數中通常不包含控制變量,等價于控制變量的權重系數為零,即對控制變量沒有約束,這樣會得到較高的動態響應速度,但容易使被控變量產生更大的紋波。由于FCS-MPC的評價函數中通常只包含被控變量相關的優化項,且可以靈活選擇評價函數的形式,使其能夠采用多種方法實現權重系數設計,常用的方法包括:當評價函數中的優化項是同一類型物理量時,不需要設計權重系數[40,121];將評價函數中不同類型的物理量轉化為同一類型,可以避免設計權重系數[122];將包含多個物理量的復雜評價函數分解成多個僅包含單個物理量的簡單評價函數,采用順次優化的方法避免設計權重系數(sequential model predictive control,SMPC)[123-124];采用多評價函數和模糊邏輯來確定權重系數[125]等。 CCS-MPC采用的評價函數與FCS-MPC不同,不但含有被控變量相關的優化項,還含有控制變量的優化項(用于限制控制變量的幅值或增量)。即使CCS-MPC的被控變量是同一類物理量,也不能采用與FCS-MPC類似的無權重系數設計方法。因此,CCS-MPC的權重系數設計方法靈活性較低。啟發式算法是CCS-MPC最常用的權重系數設計方法。文獻[126]針對三相感應電機電流控制,以系統閉環模型為基礎,建立了設計參數與系統動態性能指標之間的關系,提出了權重系數、預測域長度、控制域長度的半解析參數設計方法。該方法可以根據動態性能指標直接計算MPC參數,大幅度減少參數設計所需的仿真和實驗工作量。 交流電機控制中,MPC的分析和設計通常在理想情況下完成,不考慮參數誤差的影響。實際應用中,電機參數測量通常存在誤差,某些電機參數還會受環境影響而發生變化(例如:電機定、轉子電阻隨環境溫度升高而增加,磁場飽和導致互感及漏感變化等)。這時,MPC的性能將會受到這些參數變化的影響,出現動態特性變差、控制偏差以及穩定性下降等問題。因此,需要研究提高MPC魯棒性的設計方法。 理論研究領域中,MPC魯棒性研究的核心問題是如何處理不確定性因素[127]。目前,處理不確定性因素有兩類基本思路。一類思路是不建立不確定因素(例如:擾動、模型參數誤差等)的模型,而是在假設其有界的前提下,針對最差的情形完成設計。這種思路類似魯棒控制,其設計結果比較保守。另一類思路是建立不確定因素的模型,利用該模型預測不確定因素的變化,并以此為基礎完成優化。這類思路需要對不確定因素建模,因此也被稱為隨機模型預測控制(stochastic model predictive control,SMPC)。SMPC在MPC理論領域得到了廣泛研究,并產生了很多分支和方法[128]。 交流電機控制中,提高魯棒性仍然是MPC研究的熱點問題[11],參數在線辨識、預測誤差反饋校正是主要的方法。文獻[60]通過預測誤差比例反饋校正提高了預測電流控制的魯棒性,該方法雖然能提高PCC的魯棒性,但無法實現無偏差控制;文獻[129]通過預測誤差積分補償實現了PMSM的魯棒PCC,該方法可以實現無偏差控制,但會降低系統的動態特性;文獻[90]采用參數在線辨識和校正的方法實現了感應電機無偏差電流預測控制。除了上述方法外,還可以采用擾動觀測器實現魯棒MPC;文獻[130]采用擾動觀測和補償實現了感應電機的轉矩控制;文獻[86]采用自適應擾動觀測器實現了PMSM的電流控制;文獻[58]采用廣義比例積分觀測器實現了感應電機的魯棒PCC;文獻[88]采用增量模型和擴張觀測器實現了PMSM的電流預測控制。此外,文獻[89]采用控制不變集和Lyapunov函數實現了PMSM的魯棒MPC控制。 本文針對交流電機控制,梳理和歸納了MPC的現狀和發展,可以得到如下結論和展望: 1)理論方面,建立了較為完整的研究體系,MPC基本的設計方法與流程逐漸成熟;控制偏差、穩定性、魯棒性等基本理論問題得到了研究;EMPC、約束搜索等新型在線優化算法得到研究,在線計算速度和效率得到提高;MPC開始與模糊控制等其他現代控制方法結合使用,構成了更加有效的控制方法。此外,不同類型MPC之間的聯系以及比較也得到了一定的研究。 2)應用方面,從僅利用MPC取代多環結構中的控制器,逐漸發展到采用MPC實現統一控制、直接轉矩控制等。此外,MPC還擴展到矩陣變換器驅動交流電機[131-132]、雙三相電機和多相電機控制[133-136]、多相電機容錯控制[137-138]以及多電平變換器驅動交流電機的控制[139-140]等應用。 3)穩定性分析與設計、魯棒性分析與設計等問題在結合應用領域特點的基礎上還沒有得到充分研究,理論研究與應用之間還存在較大差距;雖然形成了較為完整的設計方法和流程,但參數(預測域長度、權重系數等)設計方法等問題仍然沒有得到很好解決,多數參數仍然需要依靠經驗以及實驗來確定;控制方法實現時,仍然存在計算量大、計算速度慢等問題,需要采用更先進的快速算法以及FPGA等計算能力更強的芯片來實現。這些都是未來需要進一步研究的內容。3.4 魯棒性設計
4 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
