基于改進灰狼優(yōu)化算法的PMSM滑模自抗擾控制
2022-12-04 11:26:08趙希梅陳廣國金鴻雁
電機與控制學報 2022年11期
趙希梅, 陳廣國, 金鴻雁
(沈陽工業(yè)大學 電氣工程學院,遼寧 沈陽 110870)
0 引 言
永磁同步電動機(permanent magnet synch-ronous motor,PMSM)具有高效率、大扭矩慣性比、結(jié)構(gòu)簡單、可控性好的優(yōu)點,在工業(yè)伺服系統(tǒng)中得到廣泛應用[1]。由于PMSM本身具有時變性、非線性、強耦合的特點,當系統(tǒng)受到外部擾動、參數(shù)變化的影響時,傳統(tǒng)的PID控制很難滿足高精確度控制的需求[2-3]。
由我國的韓京清學者提出來的自抗擾控制(active disturbance rejection control,ADRC)一種新的非線性控制方法,因其控制過程中不需要知道控制對象的精確數(shù)學模型和對不確定因素具有強魯棒性而得到廣泛應用[4-5]。文獻[6]提出了一種增強型線性自抗擾控制器,該控制器由兩個線性擴張狀態(tài)觀測器(extended state observer,ESO)組成,對外部擾動和參數(shù)變化具有很好的抑制作用,而不需要精確的PMSM數(shù)學模型。但是傳統(tǒng)ESO的峰值問題沒有得到解決,容易影響觀測精確度。文獻[7]提出一種基于非線性ESO的PMSM全速范圍控制策略,可以快速估計不確定因素并進行補償,相比線性ESO提高了觀測精確度,同時具有更小的峰值。文獻[8]提出一種基于增益連續(xù)ESO的PMSM電流解耦控制方法,增益連續(xù)ESO克服了非線性函數(shù)fal()切換點的突變問題,具有較好的觀測精確度。由于控制器參數(shù)較多,很難認為調(diào)整到最佳性能,同時,灰狼優(yōu)化算法(grey wolf optimizer,GWO)因其算法簡單、需要調(diào)節(jié)參數(shù)少、搜索能力強等優(yōu)點備受青睞[9-10]。文獻[11]提出了一種基于GWO的轉(zhuǎn)矩預測控制方法,采用GWO優(yōu)化了PMSM低速運行時的轉(zhuǎn)矩跟蹤,振動較小,實現(xiàn)了轉(zhuǎn)速和轉(zhuǎn)矩的平滑切換。但是GWO仍然存在一般元啟發(fā)式算法的問題,需要平衡其局部搜索和全局搜索的能力,避免陷入局部最優(yōu),同時提高搜索速度。由于滑模控制(sliding mode control,SMC)具有對外部擾動和參數(shù)變化不敏感、快速響應的優(yōu)點,本文將SMC代替自抗擾控制中的非線性狀態(tài)誤差反饋(non-linear state error feedback,NLSEF)來提高系統(tǒng)的魯棒性。
基于此,本文提出一種基于改進灰狼優(yōu)化算法(improved grey wolf optimizer,IGWO)的滑模自抗擾控制(sliding mode active disturbance rejection control,SM-ADRC)方案,抑制不確定性的影響并提高PMSM伺服系統(tǒng)的收斂速度。首先,設計(variable gain extended state observer,VGESO)抑制初始峰值,提高觀測精確度;然后依據(jù)觀測值設計滑模控制器,以此提高系統(tǒng)的魯棒性和收斂速度;使用IGWO優(yōu)化SM-ADRC中滑模控制部分的參數(shù),充分發(fā)揮所設計控制器的性能。通過仿真實驗證明,所提出的控制方案可以在短時間內(nèi)將PMSM的轉(zhuǎn)速跟蹤到給定轉(zhuǎn)速,抑制不確定性因素對系統(tǒng)性能的影響,同時也有效地削弱抖振。
1 PMSM數(shù)學模型
使用Park變換,可以得到d-q坐標下的表貼式PMSM的電壓方程為:
(1)
其中:id、iq和ud、uq分別是d軸和q軸的定子電流和定子電壓;Ld、Lq是d軸和q軸的定子電感,其中Ls=Ld=Lq;ψf是永磁體磁鏈;R是定子電阻;ωe表示轉(zhuǎn)子電角速度。
表貼式PMSM的運動方程為:
(2)
其中:J是轉(zhuǎn)動慣量;ω是機械角速度;Te是電磁轉(zhuǎn)矩;B是粘滯摩擦系數(shù);TL是負載轉(zhuǎn)矩;p是極對數(shù)。
在id=0的解耦控制下,轉(zhuǎn)矩方程為
(3)
考慮參數(shù)變化和外部擾動,表貼式PMSM的運動方程改寫為
(4)
其中:b0=3Pψf/2J是電流iq的增益項;b1=B/J是轉(zhuǎn)速ω的增益項;b2=1/J是負載轉(zhuǎn)矩TL的增益項。Δ0、Δ1、Δ2為對應增益項的擾動。式(4)可以改寫為
(5)
其中F=Δ0iq-Δ1ω-(b2+Δ2)TL是系統(tǒng)受到的內(nèi)外擾動的總和。
2 PMSM控制系統(tǒng)設計
2.1 傳統(tǒng)ADRC
ADRC是一種對系統(tǒng)內(nèi)外未知擾動實時觀測并進行補償?shù)目刂品椒ǎǜ櫸⒎制?tracking differentiator,TD)、ESO、NLSEF三部分;一階ADRC的結(jié)構(gòu)框圖如圖1所示。

圖1 一階ADRC結(jié)構(gòu)框圖
TD的表達式如下:
(6)
其中:r為ω*的跟蹤信號;R為速度跟蹤因子。
ESO的表達式如下:
(7)
其中:z1是ω的跟蹤信號;z2是擾動總和F的觀測值;β1、β2是誤差校正因子。
NLSEF的表達式為:
(8)

(9)
其中:ex是誤差;αx是非線性因子;δx是濾波因子;x=r、ω、n。
2.2 SM-ADRC設計
傳統(tǒng)ADRC待調(diào)節(jié)的參數(shù)較多,同時由于PMSM速度控制是一階的,不需要二階變量,為了簡化設計,所以設計過程中舍棄TD部分。基于IGWO的PMSM控制系統(tǒng)框圖如圖2所示。

圖2 基于IGWO的PMSM控制系統(tǒng)框圖
由于fal(ex,αx,δx)是分段函數(shù),是通過切換條件來切換不同的表達式,且切換點的不可導性會使得動態(tài)增益出現(xiàn)突變,嚴重時會導致觀測出來的狀態(tài)量發(fā)生抖振,為了克服這一問題,這里采用一種誤差校正函數(shù)fac(),其表達式為
(10)
其中λ為誤差增益。根據(jù)反正切函數(shù)特性,該函數(shù)可以不用再根據(jù)ex的大小切換表達式,具有連續(xù)可導性。為了獲得“大誤差小增益,小誤差大增益”的校正特性,選取αx=0.5,λ=5 000。
(11)
其中r(t)為變增益,定義為
(12)
VGESO的結(jié)構(gòu)框圖如圖3所示。

圖3 VGESO的結(jié)構(gòu)框圖
在式(11)中,令
(13)
于是式(11)可以改寫為:
(14)

(15)
令eF=z2-x2,L1=β1G1,L2=β2G2,根據(jù)式(14)和式(15)得:
(16)
令γ1=eω,γ2=eF-L1eω,得:
(17)
當忽略擾動F時,上式的特征方程為
λ2+L1λ+L2=0。
(18)
根據(jù)Hurwitz定理,二階系統(tǒng)穩(wěn)定的充分必要條件是L1>0和L2>0。
因為
(19)
則G1、G2>0,推導出當β1、β2>0時,L1和L2大于0,VGESO是穩(wěn)定的。
當系統(tǒng)存在干擾總和F時,系統(tǒng)存在穩(wěn)態(tài)誤差。系統(tǒng)達到平衡狀態(tài)之后,有:
(20)
觀測器的穩(wěn)態(tài)誤差可以表示為
(21)
因此只要β2比ω0大很多,ESO的觀測誤差就會很小,以滿足精確度要求。其中ω0為VGESO的帶寬。
本文,將SMC代替ADRC中的NLSEF,提高此環(huán)節(jié)的魯棒性。為了抑制抖振,采用積分型滑模面
(22)
式中:e0=ω*-z1是期望角速度(ω*)和角速度觀測值(z1)之間的誤差,c是大于0的任意變量。用z2代替擾動總和F,結(jié)合式(5)得
(23)
使用改進型趨近率
(24)

結(jié)合式(23)和式(24),得
(25)
穩(wěn)定性分析:Lyapunov函數(shù)為
(26)
則
(27)
因此系統(tǒng)穩(wěn)定的。
2.3 IGWO設計
GWO是最近受灰狼的包圍行為和狩獵行為啟發(fā)而提出來的優(yōu)化算法,同時GWO具有等級制度。根據(jù)灰狼的社會行為劃分了4個等級,其中α狼為領導狼,代表最好的最優(yōu)解;以及β狼和δ狼,分別代表第2個和第3個最優(yōu)解,在決策過程中為領導狼提供幫助;而γ狼按照命令行動。GWO的各狼等級如圖4所示。

圖4 灰狼等級圖
包圍行為可以用數(shù)學模型表示為:
D=|CXp(t)-X(t)|;
(28)
X(t+1)=Xp(t)-AD。
(29)
其中:Xp(t)和X(t)分別代表獵物和灰狼的位置,D為獵物與灰狼的距離,X(t+1)為灰狼根據(jù)獵物位置進行包圍行為的下一個位置。A和C為控制系數(shù),為:
A=2ar1-a;
(30)
C=2r2。
(31)
其中:r1和r2為[0,1]的隨機變量。收斂因子a在迭代過程中從2線性下降到0。
狩獵行為可以用數(shù)學模型表示為:
(32)
(33)
(34)
定義目標函數(shù)為
(35)
其中N為采樣總數(shù)。
由于,收斂因子a是線性遞減的,沒有充分發(fā)揮灰狼的探索能力,容易造成早熟問題。所以采用改進收斂因子
(36)
其中:t為當前的迭代次數(shù);tmax為最大迭代次數(shù);rand()為0到1的任意值。
3 系統(tǒng)仿真實驗分析
為了驗證IGWO的求解能力,本文選擇5個標準測試函數(shù),分別采用IGWO、GWO、粒子群(particle swarm optimization,PSO)進行求解。標準測試函數(shù)如表1所示。

表1 標準測試函數(shù)
在MATLAB上對進行測試,最大迭代次數(shù)設置為500,得到如圖5所示的函數(shù)值收斂曲線。

圖5 函數(shù)值收斂曲線
從函數(shù)值收斂曲線可以得出,在5種標準測試函數(shù)測試下,IGWO的收斂速度比GWO、PSO更快,同時IGWO的求解精確度也比GWO、PSO的更高。
采用Link-RT半實物仿真平臺進行實驗驗證,半實物仿真平臺如圖6所示。主要包括上位機、Link-BOX實時仿真機、扭矩傳感器、伺服電機、伺服驅(qū)動器等。

圖6 半實物仿真平臺
為了驗證本文的改進SM-ADRC的有效性,PMSM伺服系統(tǒng)分別采用ADRC、傳統(tǒng)SM-ADRC(傳統(tǒng)滑模+ESO)、改進SM-ADRC進行實驗對比。基礎條件可以設置為:逆變器的給定電壓為Udc=311 V;SVPWM的開關切換頻率設置可以為f=10 kHz,采樣周期Ts=10 μs,相對誤差可以設置為0.000 1。PMSM的參數(shù)如表2所示。
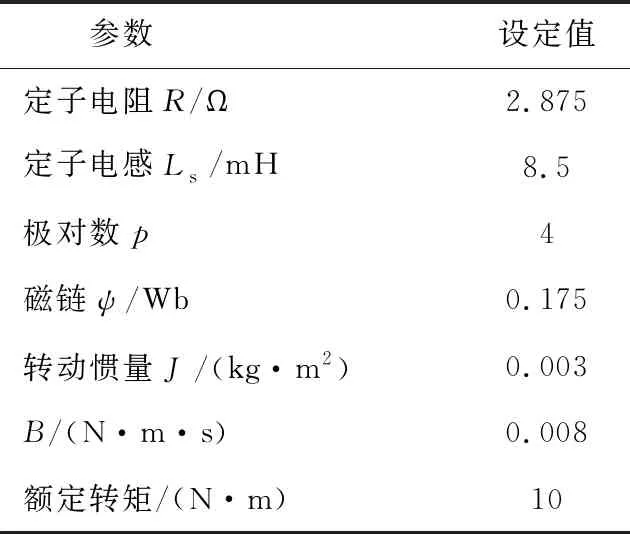
表2 電機參數(shù)
為了充分發(fā)揮控制器的性能,采用IGWO分別對ADRC、傳統(tǒng)SM-ADRC、改進SM-ADRC的參數(shù)進行優(yōu)化,優(yōu)化流程如圖7所示。IGWO的最大迭代次數(shù)tmax=100,運行程序得到ADRC的控制參數(shù)為:R=6 500,αr=0.4,δr=0.01,β1=8 500,β2=500 000,αω=0.9,δω=0.01,β3=5 000,αn=0.9,δn=0.01;傳統(tǒng)SM-ADRC的控制參數(shù):c=50,η=204.09,k=326.21,β1=8 500,β2=500 000,αω=0.9,δω=0.01。改進SM-ADRC的控制參數(shù):c=2 527.4,ε=0.1,η=1 451,K=0.3,β1=8 500,β2=90 000 000。

圖7 IGWO算法參數(shù)優(yōu)化流程圖
工況一,為了驗證改進SM-ADRC的跟蹤性能,PMSM伺服系統(tǒng)空載,在0時刻給定轉(zhuǎn)速設置為1 000 r/min,0.2 s時刻給定轉(zhuǎn)速設置為1 500 r/min,3種控制方法的空載轉(zhuǎn)速響應曲線如圖8、圖9、圖10所示。從圖8可知,在空載的情況下,ADRC轉(zhuǎn)速上升到1 000 r/min時的超調(diào)為3 r/min,在0.07 s時刻電機轉(zhuǎn)速穩(wěn)定在設定值1 000 r/min;ADRC轉(zhuǎn)速上升到1 500 r/min時的超調(diào)為1 r/min,在0.21 s時刻電機轉(zhuǎn)速穩(wěn)定在設定值1 500 r/min。從圖9可知,傳統(tǒng)SM-ADRC轉(zhuǎn)速上升到1 000 r/min時的超調(diào)為1 r/min,在0.012 s時刻電機轉(zhuǎn)速穩(wěn)定在設定值1 000 r/min;傳統(tǒng)SM-ADRC轉(zhuǎn)速上升到1 500 r/min時的超調(diào)為0.5 r/min,在0.21 s時刻電機轉(zhuǎn)速穩(wěn)定在設定值1 500 r/min。從圖10可知,改進SM-ADRC轉(zhuǎn)速在接近1 000 r/min時趨近速度降低,沒有出現(xiàn)超調(diào),在0.009 s時電機轉(zhuǎn)速能穩(wěn)定在1 000 r/min;改進SM-ADRC轉(zhuǎn)速在接近1 500 r/min時趨近速度降低,又沒有出現(xiàn)超調(diào),在0.21 s時電機轉(zhuǎn)速能穩(wěn)定在1 500 r/min。說明空載情況下,改進SM-ADRC下PMSM的速度可以快速跟蹤設定值,同時有效地抑制了峰值問題,沒有出現(xiàn)超調(diào)。

圖8 ADRC空載轉(zhuǎn)速響應曲線

圖9 傳統(tǒng)SM-ADRC空載轉(zhuǎn)速響應曲線

圖10 改進SM-ADRC空載轉(zhuǎn)速響應曲線
工況二,為了驗證改進SM-ADRC的抗干擾能力,初始給定轉(zhuǎn)速設置為1 000 r/min,在0.2 s時刻加10 N·m的固定負載轉(zhuǎn)矩,3種控制方法的負載轉(zhuǎn)速響應曲線如圖11、圖12、圖13所示。從圖11、圖12、圖13可知,施加10 N·m固定負載轉(zhuǎn)矩后,ADRC的轉(zhuǎn)速下降到959.8 r/min,在0.25 s才回到設定值;傳統(tǒng)SM-ADRC的轉(zhuǎn)速下降到980 r/min,在0.203 s轉(zhuǎn)速回到設定值;改進SM-ADRC的轉(zhuǎn)速下降到982 r/min,在0.203 s轉(zhuǎn)速就回到了設定值。說明改進SM-ADRC具有更好的抗干擾能力。

圖11 ADRC負載轉(zhuǎn)速響應曲線

圖12 傳統(tǒng)SM-ADRC負載轉(zhuǎn)速響應曲線

圖13 改進SM-ADRC空載轉(zhuǎn)速響應曲線
工況三,在工作環(huán)境發(fā)生變化時,PMSM的內(nèi)部參數(shù)會受到外界因素的影響,為了驗證改進SM-ADRC在參數(shù)變化之后轉(zhuǎn)速的跟蹤性能和抗干擾能力,將控制器中的電機參數(shù)(J和B)調(diào)整為原來的2倍,在0時刻給定轉(zhuǎn)速設置為1 000 r/min;然后在0.2 s處,對PMSM施加10 N·m的固定負載擾動,得到3種控制方法的轉(zhuǎn)速響應曲線如圖14、圖15、圖16所示。從圖14可知,ADRC轉(zhuǎn)速的超調(diào)為3 r/min,在0.06 s才穩(wěn)定在設定值;ADRC在受到10 N·m的固定負載轉(zhuǎn)矩后,轉(zhuǎn)速下降到959.4 r/min,在0.26 s時轉(zhuǎn)速才回到設定值。從圖15可知,傳統(tǒng)SM-ADRC的超調(diào)為0.5 r/min,振蕩0.004 s后才達到穩(wěn)定;傳統(tǒng)SM-ADRC在受到10 N·m的固定負載轉(zhuǎn)矩后,轉(zhuǎn)速下降到982 r/min,在0.201 s時轉(zhuǎn)速才回到設定值。從圖16可知,改進SM-ADRC轉(zhuǎn)速沒有超調(diào),且在0.01 s就穩(wěn)定在設置值;改進SM-ADRC在受到10 N·m的固定負載轉(zhuǎn)矩后,轉(zhuǎn)速下降到984 r/min,之后迅速回到設定值,沒有振蕩和穩(wěn)態(tài)誤差。說明改進SM-ADRC在電機參數(shù)發(fā)生變化之后,相比ADRC和傳統(tǒng)SM-ADRC超調(diào)小,對負載轉(zhuǎn)矩擾動的響應速度快且不造成振蕩,對參數(shù)變化具有很好的抑制作用。

圖14 ADRC參數(shù)變化轉(zhuǎn)速響應曲線

圖15 傳統(tǒng)SM-ADRC參數(shù)變化轉(zhuǎn)速響應曲線

圖16 改進SM-ADRC參數(shù)變化轉(zhuǎn)速響應曲線
4 結(jié) 論
為了提高PMSM伺服系統(tǒng)的抗干擾能力,本文提出了一個基于IGWO的改進SM-ADRC方法。采用VGESO觀測PMSM伺服系統(tǒng)所受到的不確定因素,同時抑制峰值問題對觀測精確度的影響;采用SMC代替NLSEF提高了控制系統(tǒng)的魯棒性。然后用IGWO對參數(shù)進行優(yōu)化,充分的顯示出本文的改進SM-ADRC比ADRC、傳統(tǒng)SM-ADRC具有更好的魯棒性,為實際的伺服系統(tǒng)應用提供了新方法。
