基于模糊PID的軌道式巡檢機器人步進電機控制算法
2022-12-05 11:36:10叢峰武高太李熙然劉皓月
數字技術與應用 2022年11期
關鍵詞:系統
叢峰武 高太 李熙然 劉皓月
1.鞍山鋼鐵集團有限公司齊大山選礦廠;2.大連交通大學
本文為實現巡檢機器人控制系統響應速度快、超調量小、遇到電壓和負載波動突變的情況下能夠自動調節的需求,設計了模糊PID 控制器,通過建立模糊規則,采用Mamdani 法進行推理,實現參數在線調整。將傳統PID 算法、BP-PID 控制算法與本文所設計的模糊PID控制算法進行對比。根據仿真結果,模糊PID 控制器系統響應速度最快,精度最高,因此可應用于巡檢機器人步進電機控制。
我國是煤炭能源大國,在煤炭運輸的多個環節都有著帶式輸送機的身影,在煤炭物料運輸的過程中需要對輸送機狀態進行監控。但是由于選礦廠工作環境十分惡劣,不能滿足人們的正常工作環境。因此在鐵礦等重要危險區域采用智能巡檢機器人代替人工巡檢,減少人員投入,保障巡檢有效執行[1]。巡檢機器人的機械結構是由五個輪組成,其中下面四個輪子是支撐輪,上面一個輪是驅動輪,驅動輪與步進電機之間由減速器連接,步進電機驅動輪行走,在運行過程中,巡檢機器人的運動狀態包括:前進、后退、停止、制動。而巡檢機器人在軌道上平穩運行是能否開展智能巡檢的關鍵,因此選擇的電機需要提供足夠轉矩,來驅動機器人運行,克服各類阻力。
步進電機是一種將電脈沖轉換為機械角位移的執行元件,其角位移量和輸入脈沖的個數成正比,在時間上與輸入脈沖同步[2]。在開環工作方式下能夠達到很高的定位精度,且低速運行時又可輸出很大的轉矩,因此在運動控制中得到了廣泛的應用[3]。但是步進電機的驅動系統存在非線性、時變、干擾等問題,傳統的PID 控制不能夠達到很好的控制效果,電機易失步,產生累積誤差,導致機器人運行不穩定。因此針對巡檢機器人運動控制系統,本文設計了模糊PID 控制器來提高步進電機驅動系統的控制性能。
1 驅動系統數學模型
在本控制系統中,采用兩相混合式步進電機作為系統的驅動電機。在不考慮定子極間和端部的漏磁、永磁體回路的漏磁,忽略磁滯渦流和飽和影響,忽略定子線圈自感的諧波分量的基礎上[4],建立電機動態數學模型。步進電機原理圖如圖1所示。
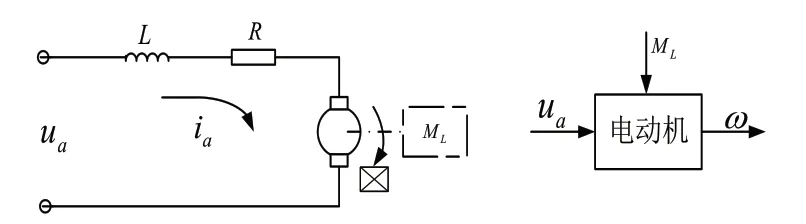
圖1 步進電機原理圖Fig.1 Schematic diagram of the stepper motor
根據克希荷夫定律:

根據負載及電機特性:
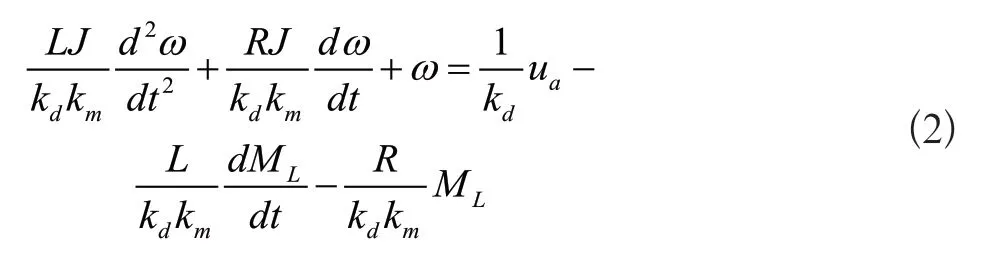
經過拉普拉斯變換,可得電機轉速,電機傳遞函數為:
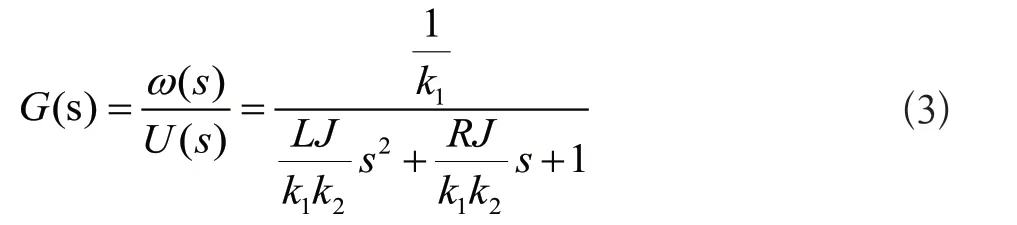
式中:J=0.01,R=1.5,L=0.01;設ML(s)=0,放大系數Kv=5,減速比Kr=5,傳感器L=1。電壓為輸入,轉速為輸出,開環傳遞函數為:

2 傳統PID 控制算法
傳統PID 控制由比例、積分、微分環節組成。它是一種線性控制器,輸入為當前系統的誤差e(t),輸出為:

其中Kp為比例系數、TI為積分時間常數、TD為微分時間常數[5]。PID 控制器的結構圖如圖2所示。
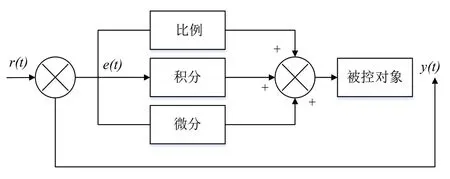
圖2 傳統PID 控制器結構Fig.2 Structure of traditional PID controller
PID 控制器的參數整定方法為經驗湊試法。觀察系統響應情況,先比例,后積分,在微分[5]。首先將P 值放在較小的位置,然后逐漸增大,觀測曲線的變化;在整定比例參數之后,將比例值縮小,不斷進行調整;最后在整定微分值。通過上述方法最終調整PID 參數為Kp=7,Ki=1.6,Kd=0.1。在計算機控制中應當將公式離散化,離散化的數學表達式如下:

3 BP-PID 控制算法
BP 神經網絡是目前應用比較廣泛的神經網絡結構,具有很好的逼近非線性映射能力BP 神經網絡算法分為正向傳播和反向傳播兩部分。BP 神經網絡的結構圖如圖3所示。
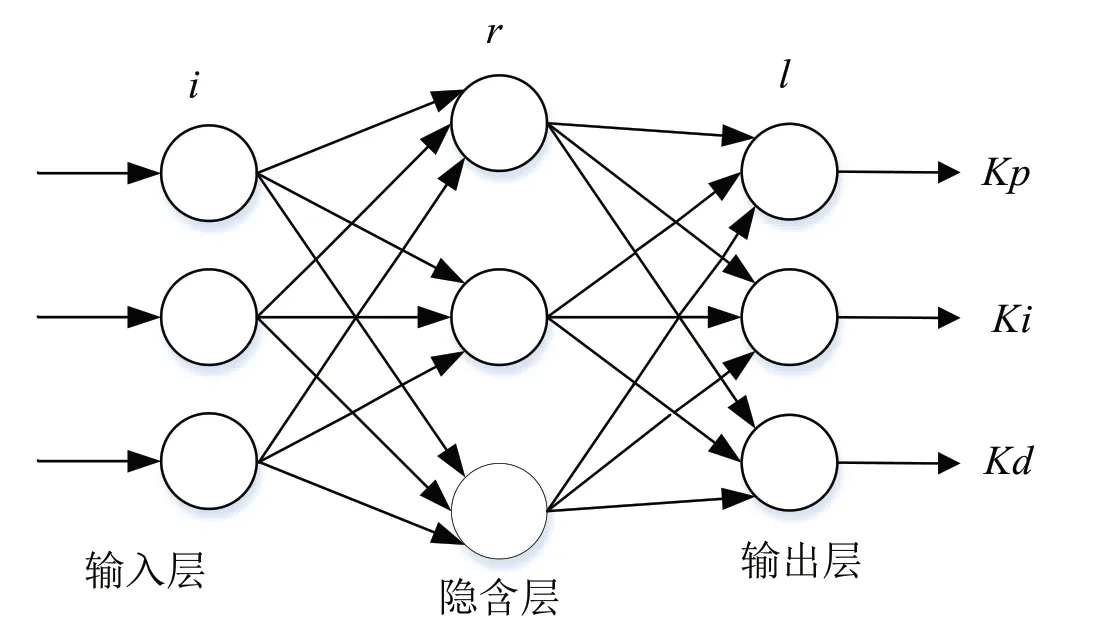
圖3 BP 神經網絡結構圖Fig.3 Structure diagram of BP neural network
BP-PID 控制器是在傳統PID 的基礎上再加入BP 神經網絡,在這個控制器中,PID 的作用是實現對被控對象的閉環控制,BP 神經網絡是為了實現對PID 參數的在線調節。如圖4所示。
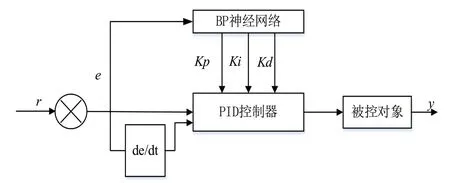
圖4 BP 神經網絡控制器結構圖Fig.4 Structure diagram of BP neural network controller
確定BP 網絡的結構,確定輸入層的節點數M、隱含層節點數Q,給出各層加權系數ωij和ωli,選定學習速率η和α為慣性系數[6];采樣得到輸入和輸出,計算此時的誤差值error;計算神經網絡各層神經元的輸入、輸出,輸出層的輸出就是PID 控制器的三個參數;根據PID 控制器計算系統的輸出U(k);進行神經網絡的學習,在線調整加權系數,實現PID 控制器的自適應調整。
4 模糊PID 控制算法
在控制系統中,模糊控制可以將非定量用模糊集來表示,把這些模糊規則以及有關信息作為知識放進計算機知識庫中,通過模糊推理可以實現對參數最佳的調整。將傳統PID 和模糊控制相結合,可自動實現對PID 參數的最佳調整。如圖5所示為模糊PID 控制器結構圖。
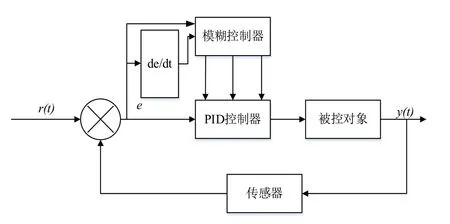
圖5 模糊PID 控制器結構Fig.5 Structure of fuzzy PID controller
將模糊控制技術與PID 控制相結合構成模糊PID 控制,應用模糊推理的方法實現對PID 的參數在線自整定。在模糊PID 控制中,輸入為偏差e和偏差變化率ec,輸出為ΔKp、ΔKi、ΔKd,輸入和輸出之間有一定的模糊關系。偏差和偏差變化率在運行過程中會不斷改變,利用模糊關系實時對三個參數進行調整[7]。
(1)確定控制器的輸入和輸出變量。
(2)設計模糊控制器的規則。根據輸入和輸出之間的關系,結合實際經驗,建立模糊控制規則表,隸屬函數為三角形函數。
(3)確立模糊化和非模糊化的方法。其中模糊化就是將精確量離散化。解模糊化的方法是重心法[8]。
(4)選擇模糊控制的輸入、輸出變量的論域。選擇e的論域為[-1 20],ec 的論域為[-15 2],Δkp的論域為[-1.5 1.5],Δki的論域為[-0.1 0.5],Δkd的論域為[-0.1 0.1]。模糊子集為e,ec={NB,NM,NS,O,PS,PM,PB},其中子集分別表示負大,負中,負小,零,正小,正中,正大[9]。
(5)模糊推理及解模糊化。通過采用模糊語句,將模糊規則寫入,形成49 條控制語句。通過Mamdani 法進行推理[10]。
輸入對輸出影響關系的空間曲面圖如圖6-圖8所示。
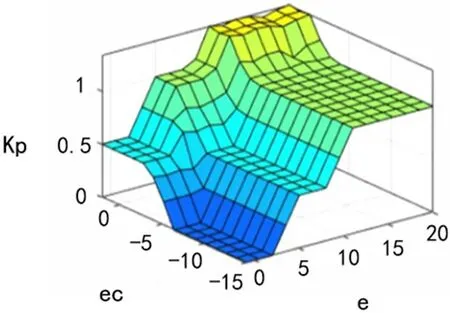
圖6 kp 空間曲面圖Fig.6 kp spatial surface graph
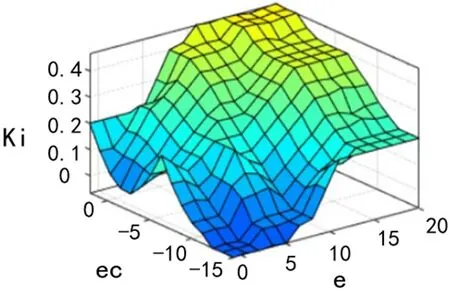
圖7 ki 空間曲面圖Fig.7 ki spatial surface graph
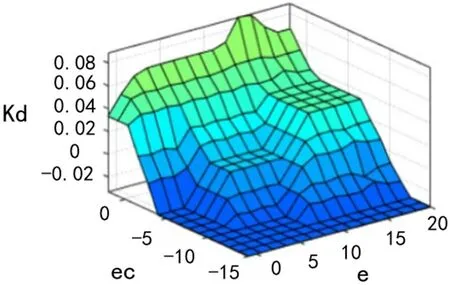
圖8 kd 空間曲面圖Fig.8 kd spatial surface graph
將傳統PID 控制器、BP-PID 控制器與本文所設計的模糊自適應PID 控制器進行仿真比較,將上文所推導的步進電機傳遞函數作為被控對象,在仿真軟件中進行搭建。仿真搭建模型如圖9所示。
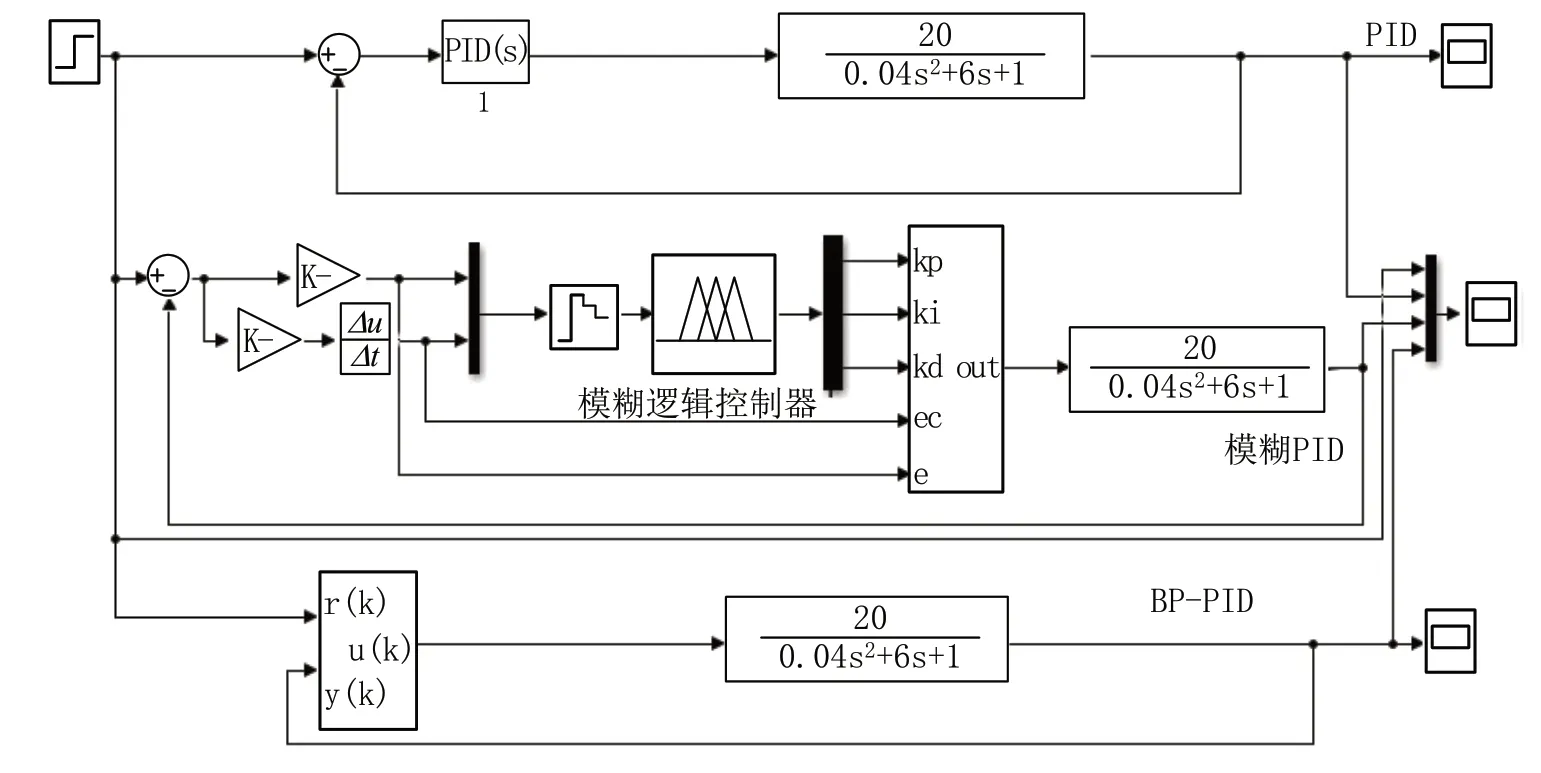
圖9 三種控制器仿真對比圖Fig.9 Simulation comparison of three controllers
設定采樣時間為1s,對PID 控制器、模糊PID 控制器、BP-PID 神經網絡控制器的性能進行仿真對比驗證,如圖10所示。
通過圖10可知模糊PID 閉環控制算法與傳統PID 算法和BP-PID 算法控制有較大的優勢。仿真結果表明在時間設定為1s 的情況下,PID 控制器的系統響應時間為0.3s,BP-PID 控制器的系統響應時間為0.2s,模糊PID控制器的系統響應時間為0.08s,根據以上對比,發現模糊PID 控制器系統響應速度最快,效果最好。
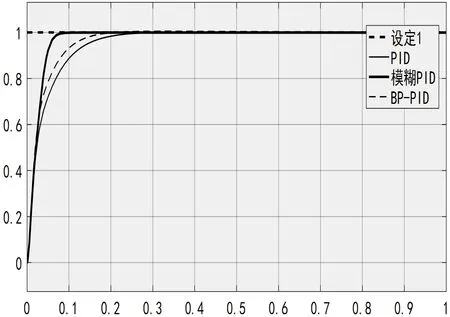
圖10 PID、BP-PID 和模糊PID 仿真曲線對比Fig.10 Comparison of PID、BP-PID and fuzzy PID simulation curves
5 結論
本文針對巡檢機器人步進電機設計了模糊PID 控制器,并將傳統PID 控制器、BP-PID 控制器與模糊PID控制器進行仿真分析,從仿真結果看出模糊PID 閉環控制算法相較于其他控制算法在系統響應速度和精度方面具有明顯優勢。因此可以將模糊PID 控制器應用于巡檢機器人運動控制系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32