仿生智能代寫機器人設計★
2022-12-08 02:42:50李欣雪龍小麗
現代工業經濟和信息化 2022年10期
李欣雪,龍小麗,關 健
(廣東理工學院,廣東 肇慶 526000)
引言
在足類手寫機器人發展的早期,科學家們主要研究的是與人類貼近的二足機器人,以及外形類似哺乳類陸生生物的機器人,但是,結果并不理想。由于當時的科技水平還無法模擬出肌肉的控制系統,而二足和四足的生物,運動時都需要比較大的力量作為基礎,無法實現力量控制。隨后,科學家們才將目光投向了三足機器人,當他們發現,雖然采用三足結構的機器人運動速度并不快,但是通過三角步態,重心能很好地落在三只支撐足組成的三角形中,比起普通的四足機器人,更具有靈活度優勢[1]。
在自然界中,陸地上大多數生物的手寫都是以足類運動為主,因此,衍生出輪式、履帶式機器人,代替人類實現一些大型勞動力的過程,減少了人類各種勞動力的任務[2-3]。但是,隨著社會的不斷發展,社會經濟結構從之前的勞動密集型經濟轉化為科技為主的創新型經濟,大型的輪式、履帶式機器人已經無法滿足人們的要求。因此,本文設計了仿生足類智能代寫機器人。
1 手寫三角步態設計
本論文仿生手寫機器人的手寫方式主要參考了Vincross人工智能科技公司研發的HEXA機器人中提出的手寫三角步態,手寫時通常將六只腳分為兩組,每組三足呈三角形交替手動手寫,以保證重心的穩定[4]。這種步態依靠手部的前后擺動將身軀前移,雖然為了讓重心保持在三角形內,導致手部跨度小,手寫速度也不快,但是其穩定性卻無可置疑。在下列分析中,假定左前、右中、左后為A組足,右前、左中、右后為B組足。
前進的流程,可分解為兩個過程以及三個狀態間的轉換。假設A組足先動,狀態a為初始狀態,左三和右三足呈對稱形態。狀態b為A組足角度較初始狀態不變并抬起,B組足組成的重心較初始狀態滯后。狀態c為B組足角度較初始狀態不變并抬起,A組足組成的重心較初始狀態滯后。過程x為B組足落地,A組足抬起并恢復初始位置,隨后B組足以足尖為支點帶動身軀前移。過程y為A組足落地,B組足抬起并恢復初始位置,隨后A組以足尖為支點帶動身軀前移,前進控制流程圖如圖1所示。
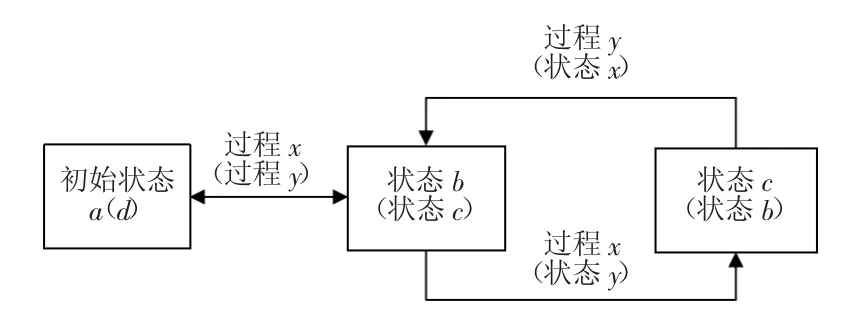
圖1 三角步態控制流程圖
而定點轉彎的實現如下頁圖2所示,通過控制落地足相對機身的角度,從而實現方向的改變。定點轉彎的流程可分解為三個狀態。從左轉彎來看,狀態a為初始狀態,狀態b時,B組足抬起,A組足角度改變,狀態c則為B組足落地,A組足恢復原始角度。當轉彎時,B組足抬起,同時A組足控制方向改變,隨后B組足落地,A組足抬起恢復角度后落地,狀態從a-b-c-a(d)進行循環。由于轉彎的過程實際就是抬腳與落地,因此,過程不進行具體講述。定點轉彎步態圖如下頁圖3所示。
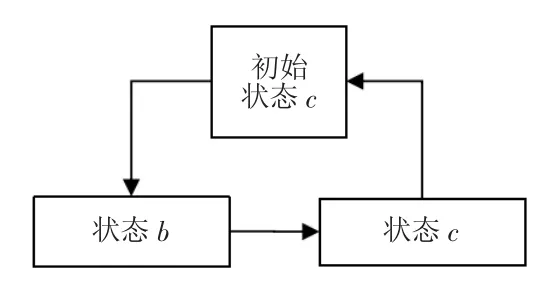
圖2 定點轉彎流程圖
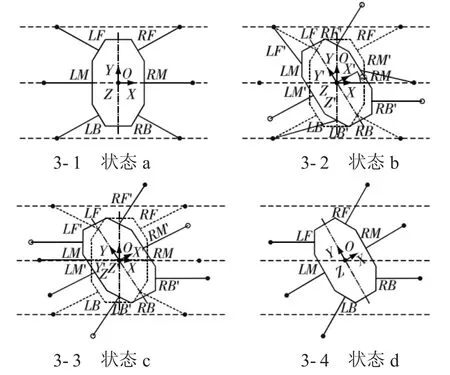
圖3 定點轉彎步態圖
2 定時PWM控制
定時器輸出PWM波首先要對CCMR1:OC1M[2:0]進行設置,PWM模式1為[110],PWM模式2為[111],并設置TIMx_CR1中的DIR寄存器,DIR=0為向上計數,DIR=1為向下計數。
定時器輸出PWM的過程主要是由CNT、ARR、CCRx三個寄存器控制[3]。CNT寄存器的功能為計數,儲存當前值。ARR寄存器的功能是自動重裝載,計數值達到設定值后會歸零重新加載。CCRx寄存器的功能是捕獲或比較,這里是為了改變占空比,用到的是比較功能。
向上和向下計數、PWM模式1和模式2的區別:當處于向上計數時,占空比的比較條件CNT的值<CCRx的值,而向下計數時,則條件CNT的值>CCRx的值。在PWM模式1下,條件為真,則輸出有效電平;條件為假,輸出無效電平。相反,在PWM模式2下,條件為真時,輸出無效電平,反之輸出有效電平。
因此,可以通過設定ARR的值,當CNT計數值達到ARR的設定值時,ARR就會歸零,并自動重新裝載,達到控制PWM輸出頻率的改變。而占空比的控制則通過改變CCRx寄存器的值。當不同的值與CNT的值進行比較,同一周期內輸出的有效電平和無效電平的比例也隨之改變,意味著占空比也隨之改變。
3 智能機器人總體實現
智能代寫機器人總體框架如圖4所示,以STM32為核心進行協調控制,結合穩壓供電模塊[5]、藍牙通信模塊[6]、攝像頭模塊、超聲波模塊[7]、舵機模塊以及其他拓展模塊構成。智能代寫機器人的手動手寫實際上就是舵機角度的改變,而舵機角度的改變是控制信號PWM波占空比的改變。顯示在程序里,就是對定時器進行配置,然后根據步態不斷地改變定時器輸出PWM波的占空比。
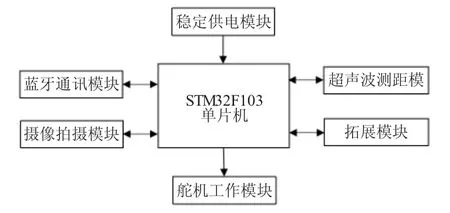
圖4 智能代寫機器人總體框架
通過FIFO攝像頭模塊,圖像傳感器傳輸的數據時序進行過多的控制,只要讀取FIFO中的前76 800個像素(QVGA格式)就是所需要的圖片。而對于RGB565格式的像素數據,需要用16位的空間來存儲。每個PCLK周期只讀半個像素,因此需要分別讀低8位和高8位的像素數據。都被緩存在了FIFO模塊中。因此,讀數據時不需要對
藍牙通訊模塊初次使用時,最好先通過USB轉TTL模塊,將藍牙模塊HC-05與電腦連接,用串口調試軟件XCOM查詢或配置好HC-05的波特率,配對密碼、姓名等。手機藍牙發送數據后,STM32單片機接收并發送回所接收到的數據,藍牙通訊測試圖如圖5所示。加入循環代碼后,調整占空比,實現如流水燈的效果,等效于PWM波占空比的改變。手寫機器人書寫字體實際效果圖如圖6所示。

圖5 藍牙通訊模塊測試圖
圖6 機器人書寫字體實際操作圖
4 結論
本次仿生智能代寫機器人設計研究主要利用超聲波模塊進行測距避障,攝像頭進行數據的讀取,使用藍牙對手寫機器人進行控制和雙向通訊。采用STM32的定時器輸出占空比可變的PWM波,以驅動舵機角度的改變,實現了手寫機器人以三角步態的方式手動手寫。實現代寫機器人控制,以及結構上和步態上的仿生,后續設計可搭載一個陀螺儀模塊,自適應調整姿態,讓機器人看起來更加仿生。
