高揚程電力提灌工程中電機自動化控制與保護對策
2022-12-08 02:43:10魏新玲
現代工業經濟和信息化 2022年10期
魏新玲
(甘肅省景泰川電力提灌水資源利用中心,甘肅 景泰 730400)
引言
高揚程電力提灌工程在實際運行過程中主要依托電動機提供的驅動力帶動水泵運轉,將電能轉化為機械能,帶動壓力輪運轉,將低位水提升至高位,主要應用于地勢差較大的區域。隨著社會的快速發展,對高揚程電力提灌工程提出了更高的要求,要求在滿足灌溉必需的水位控制功能的同時,具備自動灌溉功能,提升灌溉效率,降低生產人員工作負荷。因此,高揚程電力提灌工程電機自動化控制,成為技術領域的主要研究內容。
1 高揚程電力提灌工程電機自動化控制的價值
傳統高揚程電力提灌工程中,主要以電機作為主要驅動力,系統在實際運行過程中需要不同部件之間相互配合。手工操作模式下,在人工控制過程中不可避免地存在一定偏差,工作效率低下。通過對高揚程電力提灌工程進行自動化改造、運用軟件程序以及相應的設備,工程控制及管理效率得到大幅提升,設備調整效率也隨之提升[1]。此外,人工控制模式在實際應用中不可避免地會加大能源消耗量,而在自動化控制模式運行過程中,可隨時調整設備運行狀態,避免資源浪費,有效落實了我國節約資源的戰略目標。
2 案例工程概述
為深入探究高揚程電力提灌工程電機自動化控制以及保護措施,本文將選取相應的工程案例進行具體說明。案例工程為某地區高揚程電力提灌工程,其位置距離市區約200 km,設計從黃河五佛段提取水源。技術人員在對本工程進行設計過程中,依據當地實際發展需求,規劃提水流量以及加大流量分別為28.6 m3/s、33 m3/s,設計裝機容量為2.487×105kW,設計泵站建設數量為43座,最大提水高度可達602 m,可以有效滿足周邊近百萬畝的農田灌溉需求。當前,自動化技術不斷發展成熟,為切實提升該工程應用效率,技術人員決定對其高揚程電力提灌工程電機進行自動化改造。
3 高揚程電力提灌工程自動化控制設計
3.1 泵站綜合控制系統結構設計
案例工程中,技術人員在綜合當前技術水平以及泵站管理實際要求的基礎上,對高揚程電力提灌工程控制系統基本結構進行設計,主要分為現地控制級、集中控制級,充分體現出泵站分散控制、集中管理的特征。
現地控制級設計中,主要包含PLC測控和微機綜合保護。該層級在實際運行過程中,主要承擔泵站主機組工作電壓、電流、機組功率等運行參數的采集、處理職能,其中,泵站微機綜合保護主要由進線保護、電容保護和電機保護構成[2]。
集中控制級在實際設計中,主要圍繞主控計算機這一中心,利用北京力控工控組態軟件作為二次開發平臺,設計對應現場設備的操作仿真界面,并采用I/O、通訊及視頻監控設備。該層級在實際運行過程中,主要通過計算機、網絡以及接收設備所采集的現地控制級信號,對相關數據進行處理與儲存,并提供事故報警、數據庫管理等服務。同時,在有需要的情況下,該層級可發布相應的控制指令,對現地控制級運行狀態進行調整[3]。技術人員在實際設計中在泵站關鍵地點設置視頻監控設備,實現了對設備運行狀況、主控室情況等方面的實時監控,監控系統在一定程度上還承擔著安保系統職責。
3.2 泵站綜合控制系統操作設計
技術人員在進行自動化設計過程中,充分考量總供水目標及優化調度要求,將優化調度與經濟運行作為操作環節主要設計原則,做出如下設計:
1)在滿足總流量和水位控制條件要求的基礎上,以實際水泵運行特性曲線為中心,遵循抽水量—功率消耗的等微增率原則,對泵站效率曲線進行優化。同時,依照預定流量條件,確定泵組開啟臺數,有效達成多泵組自動啟閉控制以及變速調節目標[4]。
2)依據不同泵組及輔助設備實際運行狀態,確定運行泵組的啟閉順序。
3)對安全限制約束條件進行校核,在對泵組、閥門特性以及泵組氣蝕區、振動區等多個方面進行綜合考量,設計泵組運行限制條件。
4 電機保護設計要點
從實際應用角度分析可知,泵站運行過程中需要高壓電動機提供必要的驅動源。案例工程中,技術人員也認識到高壓電動機設備的重要性,并在充分考量實際需求的基礎上,決定采用差動保護原理進行電機保護設計[5]。
技術人員在實際設計過程中,決定采用比例制動模式。在該模式下,裝置運行過程中可以對A、B、C各相兩側電流進行采集,并得出I1、I2,經過運算,可得出如下公式:

Id=(兩側TA為同極性接線)。
由此,可得出如下動作方程:
式中:Izd為制動電流,實際進行計算時取最大電流;Id、Icd分別為差電流以及差動定值;Ig為拐點電流,其0.7倍情況下為額定電流Ie。
當制動電流Izd數值在拐點電流Ig數值之下時,其動作方程表示為Id>Icd。當制動電流Izd數值在拐點電流Ig數值之上時,其動作方程表示為Id>Icd+(Izd-Ig)K。
圖1為比例制動動作電流及拐點電流關系示意圖。
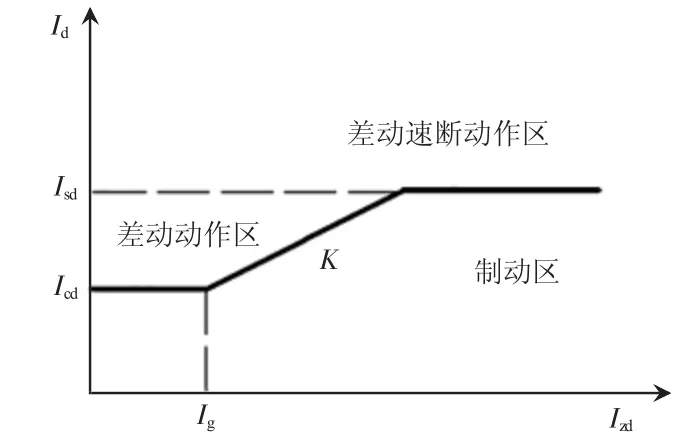
圖1 比例制動動作電流及拐點電流關系示意圖
5 結語
對電力提灌工程進行自動化改造后,機電設備及水工建筑運行安全性、設備調度科學性、供水穩定性得到大幅提升,取得了預期成效。除此以外,在自動化改造完成后,機組運行狀態得到有效優化,裝置運行效率提升幅度較為顯著,水資源優化配置目標完全達成,級間流量配合度大幅提升,節約水資源戰略目標得到有效落實。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
湖南水利水電(2021年6期)2022-01-18 06:07:40
電子制作(2018年11期)2018-08-04 03:26:08
河南水利年鑒(2017年0期)2017-05-19 02:32:09
河南水利年鑒(2016年0期)2016-08-03 05:01:40
太空探索(2016年6期)2016-07-10 12:09:06
工業設計(2016年12期)2016-04-16 02:52:00
河南水利年鑒(2015年0期)2015-08-16 04:25:49
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
