汽車轉向非線性平衡點求解新方法及其應用
2022-12-09 06:57:48李杰賈長旺趙旗
汽車工程學報 2022年6期
李杰,賈長旺,趙旗
(吉林大學汽車仿真與控制國家重點實驗室,長春 130025)
傳統的汽車理論是采用線性輪胎模型進行汽車性能研究的,經典的汽車操縱穩定性理論也是在此基礎上發展起來的[1]。然而,輪胎非線性對汽車性能的影響很大,在高速或大轉角行駛條件下,輪胎很容易進入非線性區域,如果再使用線性輪胎模型進行汽車性能研究,會造成較大的誤差[2]。
轉向非線性平衡點是進行汽車轉向非線性穩定性分析與控制的起點,只有在確定轉向非線性平衡點后才能判別汽車轉向非線性運動穩定性。穩定的轉向非線性平衡點決定了汽車非線性轉向運動的穩定性,不穩定的非線性轉向平衡點表征了汽車非線性轉向穩定域的邊界,由此劃分出汽車轉向非線性運動的穩定域和非穩定域[3],便于分析和應用。通過將轉向非線性平衡點作為穩定域邊界,可用雙直線[4]或菱形[5-7]等描述汽車非線性運動的穩定域,以此實現汽車轉向非線性穩定性控制系統設計[8-9]。此外,非線性分岔可能會在轉向非線性平衡點處發生[10-13]。一旦發生分岔,汽車很有可能會變得不穩定[14-15]。因此,針對不同行駛條件,定量確定轉向非線性平衡點及其變化規律,對汽車非線性轉向穩定性分析與控制的研究具有重要意義。
以往求解轉向非線性平衡點,最常用的方法是通過在相平面或者相空間中繪制相軌跡獲得[3-6],優點是清晰直觀。然而,這種圖解法的缺點是只能確定轉向非線性平衡點的大概位置;并且對于轉向非線性平衡點的連續求解和復雜汽車模型的轉向非線性平衡點求解,這種圖解法也是有一定難度的。
為了克服轉向非線性平衡點求解圖解法的缺點,提出了求解轉向非線性平衡點的常規數值方法和遺傳算法[16]。常規數值方法多采用梯度類算法求解轉向非線性平衡點,如下降法、牛頓法或擬牛頓法等,存在初值敏感性問題,即對初值比較依賴,沒有較好的初值,往往得到較好的結果。遺傳算法是一種智能算法,具有較強的全局尋優能力,不依賴初值,已經用于轉向非線性平衡點的求解,但是遺傳算法存在早熟、停滯、重復等問題,造成過多的迭代。為克服遺傳算法存在的問題,提出了將遺傳算法與擬牛頓法相結合求解轉向非線性平衡點的混合優化算法[17],取得了不錯的效果。但是算法復雜,耗時較長,在求解轉向非線性平衡點時,會耗費很多時間。因此,需要對轉向非線性平衡點的求解進行更多的研究,找到一些更加簡單和快速求解轉向非線性平衡點的方法,以便更好地開展汽車轉向非線性穩定性分析與控制的相關研究。
針對轉向非線性平衡點求解問題,在前人研究的基礎上,結合汽車轉向非線性2自由度模型,提出求解轉向非線性平衡點的粒子群算法,對轉角、路面附著系數和車速分別變化行駛條件的轉向非線性平衡點進行求解。
1 汽車轉向非線性2自由度模型
1.1 汽車模型
汽車轉向2自由度模型是最經典的操縱穩定性模型,可以揭示汽車的基本規律,應用廣泛[1]。因此,選擇汽車轉向2自由度模型為研究對象。考慮汽車的側向運動和橫擺運動兩個自由度,模型的微分方程表示為:

式中:m為汽車總質量;Iz為橫擺轉動慣量;a為汽車質心到前輪的距離;b為汽車質心到后輪的距離;ay為汽車質心側向加速度;γ為汽車質心橫擺角速度;Fyf為前軸輪胎側向力;Fyr為后軸輪胎側向力。
汽車質心側向加速度的計算公式為:

式中:u為汽車縱向速度,假設為常速;β為汽車質心側偏角。
將式(3)代入式(1),有:

聯立式(4)和式(2)進行變換,得:
取狀態變量x=[β,γ]T,將式(5)和式(6)改寫成狀態方程,有:


1.2 非線性輪胎模型
采用簡化魔術公式輪胎模型描述輪胎側向力,公式為:

式中:μ為路面附著系數;Fz為車輪垂向載荷;α為輪胎側偏角;C和B為魔術輪胎模型參數。
將式(8)應用于前后輪胎時,需要確定前后輪垂向載荷和前后輪胎側偏角。前后輪垂向載荷計算公式為:

式中:Fzf為前輪垂向載荷;Fzr為后輪垂向載荷;g為重力加速度。
前后輪胎側偏角計算公式為
式中:αf為前輪胎側偏角;αr為后輪胎側偏角;δ為前輪轉角。
2 汽車轉向非線性平衡點求解
2.1 轉向非線性平衡點
式(8)的非線性導致Fy非線性,因此,式(7)就成為非線性方程,可表示為非線性自治系統的形式:

滿足?=0,即同時滿足?=f1(β,γ)=0和γ?=f2(β,γ)=0的點xe=[βe,γe]T,稱為汽車轉向非線性平衡點,簡稱為轉向平衡點。
2.2 粒子群算法
粒子群算法(Particle Swarm Optimization,PSO)是模擬鳥群覓食行為而提出的一種優化算法。鳥群在搜索食物時,會相互交換信息,每只鳥根據自身信息與其他鳥信息,再根據自己與食物的距離對搜索方向做出調整。在距離食物最近的鳥的周圍區域搜索可以更快找到食物,通過鳥之間的合作可以使鳥群最快搜索到食物[18]。
在PSO中,將優化問題的解看作是搜索空間中的一只鳥,稱為“粒子”,將鳥群作為“群體”。每個粒子具有和鳥類捕食類似的行為規則,從搜索空間的隨機解出發,通過逐步迭代搜索問題的最優解。在每一步迭代中,粒子根據本身的最優解和整個群體的最優解來調整自己的速度,群體更新當前最優解,從而使個體和群體逐步優化。
下面對粒子群算法的實現過程進行描述。假設在一個D維的搜索空間中,有N個粒子組成一個群體。對于i=1,2,…,N,第i個粒子的位置表示為一個D維向量:

第i個粒子的速度也是一個D維向量:

第i個粒子迄今為止搜索到的最優位置稱為個體極值,記為:

迄今為止,整個粒子群搜索到的最優位置為全局極值,記為:

在每一步的迭代中,粒子根據如下公式來更新自己的速度和位置:

式中:w為慣性權重;c1和c2為學習因子;r1和r2為[0,1]范圍內的均勻隨機數。
粒子群算法流程,如圖1所示。為了實現粒子群算法,首先,要根據具體問題,設計適應度函數fitness,用于計算適應度;其次,設置基本參數,包括維數D、粒子數目N、慣性權重w、學習因子c1和c2、最大迭代數M、精度ε;再次,設置粒子群初始的位置和速度,既可以設置為隨機值,也可以根據求解的問題設置相應范圍;最后,設置迭代終止條件,讓迭代次數k達到最大迭代次數M或者適應度fitness滿足精度要求ε,即:


圖1 粒子群算法流程
2.3 轉向平衡點求解的粒子群算法
為了應用粒子群算法求解轉向平衡點,需要設計適應度函數fitness。轉向平衡點求解問題,就是找出?=f1(β,γ)=0和?=f2(β,γ)=0的解,可以將其轉換為求解適應度函數最小值的數學問題,即:

求解轉向平衡點的粒子群算法,步驟具體如下:
(1)設置粒子群算法基本參數:維數D、粒子數目N、慣性權重w、學習因子c1和c2、最大迭代數M、精度ε。
(2)確定粒子群位置范圍(βmin,βmax)、(γmin,γmax)和速度范圍[-vβm,vβm]、[-vγm,vγm]。
(3)在粒子群位置范圍和速度范圍內,生成均勻分布的每個粒子的位置初值βi、γi和速度初值vβi、vγi,i=1,2,…,N。
(4)由式(21)計算每個粒子的適應度fitness。
(5)通過逐步比較,獲得每個粒子的個體最優位置βibest、γibest,通過整個種群比較,獲得群體最優位置βbest、γbest。
(6)檢查是否滿足終止條件,即式(20),如果滿足,結束搜索,輸出當前群體最優值βbest、γbest;如果不滿足,轉向步驟(7)。
(7)迭代更新第k+1步的粒子速度:首先,按照式(18)初步更新每個粒子速度,得到v′βi、v′γi;其次,要保證速度在限制范圍內,因此,第k+1步迭代的粒子速度為:

(8)迭代更新第k+1步的粒子位置:首先,按照式(19)初步計算每個粒子位置,得到β′i、γ′i;其次,保證粒子位置在限制范圍內,當β′i>βmax時,將β′i依次減去βmax-βmin,直到βi′∈[βmin,βmax];當β′i<βmin時,將 β′i依 次 加 上 βmax-βmin,直 到β′i∈[βmin,βmax];粒子位置βik+1為處理后的β′i,按照同樣的方法得到γki+1。
(9)轉入步驟(4)。
需要指出的是,粒子群算法是一種啟發式算法,具有隨機性,一次求出的結果不一定都能滿足精度要求。當結果不滿足精度要求時,通過多次運行程序求解或者改變群初值和求解范圍,問題就會得到解決。
3 應用分析
3.1 參數設置
設置汽車和輪胎參數,見表1;設置粒子群算法參數,見表2。

表1 汽車參數
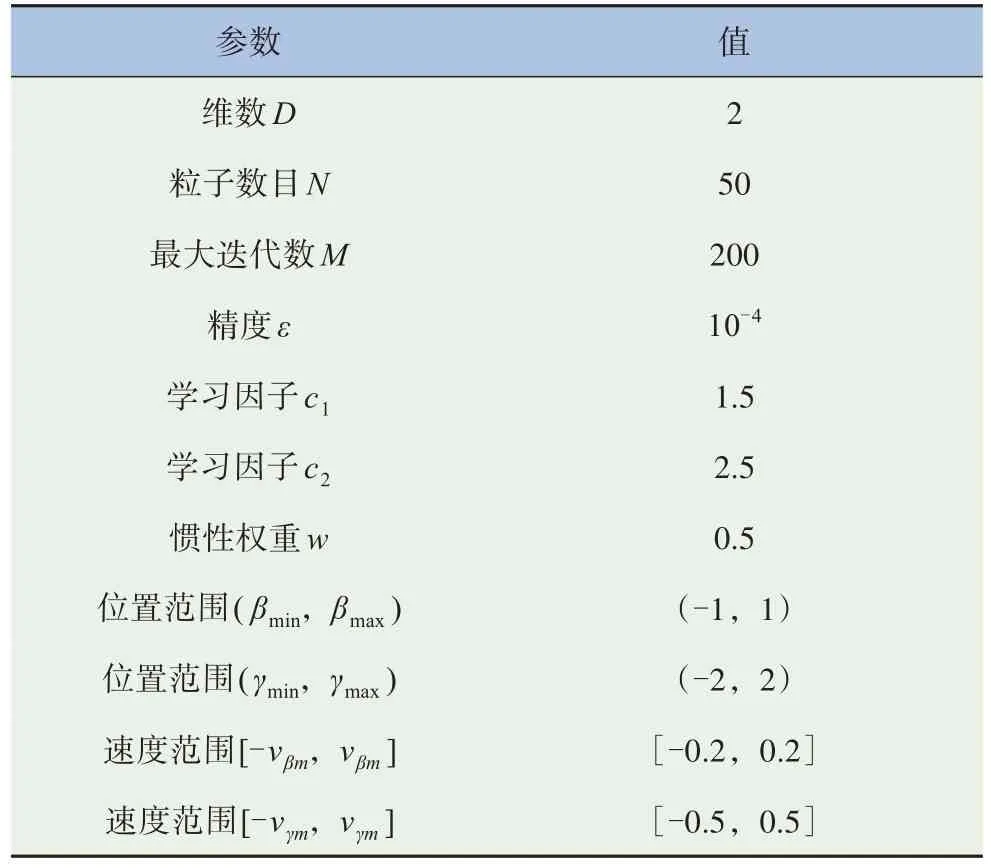
表2 粒子群算法參數
3.2 不同轉角下轉向平衡點求解
選擇路面為良好路面,路面附著系數μ設置為0.8,車速u設置為70 km/h,汽車左轉和右轉情況相同,因此,只需要研究前輪轉角δ為正值的情況,范圍取為0~0.2 rad,以0.02 rad為間隔。
求解得到的3個轉向平衡點,如表3~5所示。由這些表可以看出,應用粒子群算法求解的轉向平衡點都能滿足設置的精度要求;在某一固定轉角下,一共有3個轉向平衡點;隨著前輪轉角增大,第1個轉向平衡點和第3個轉向平衡點的β值增大,γ值變化不大;第2個平衡點的β值減小,γ值增大。
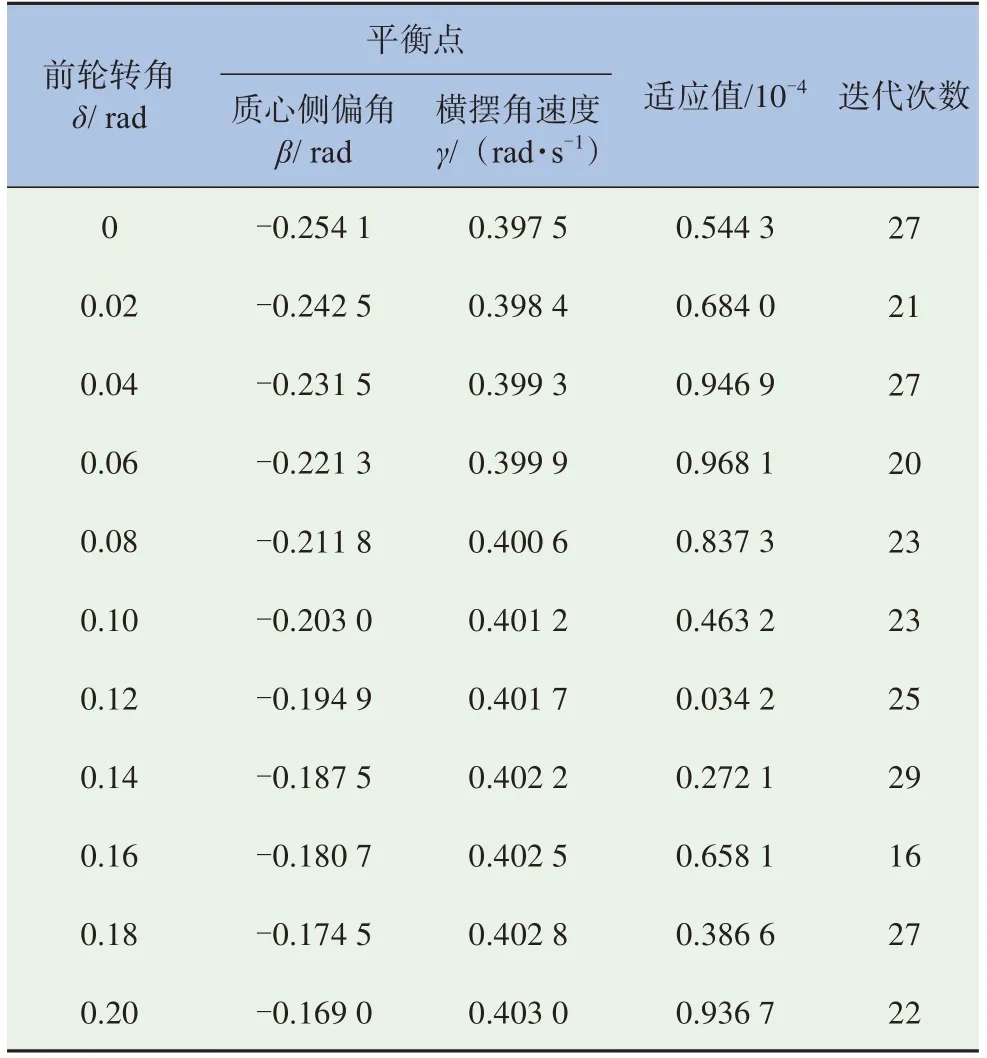
表3 u=70 km/h和μ=0.8時的第1個轉向平衡點
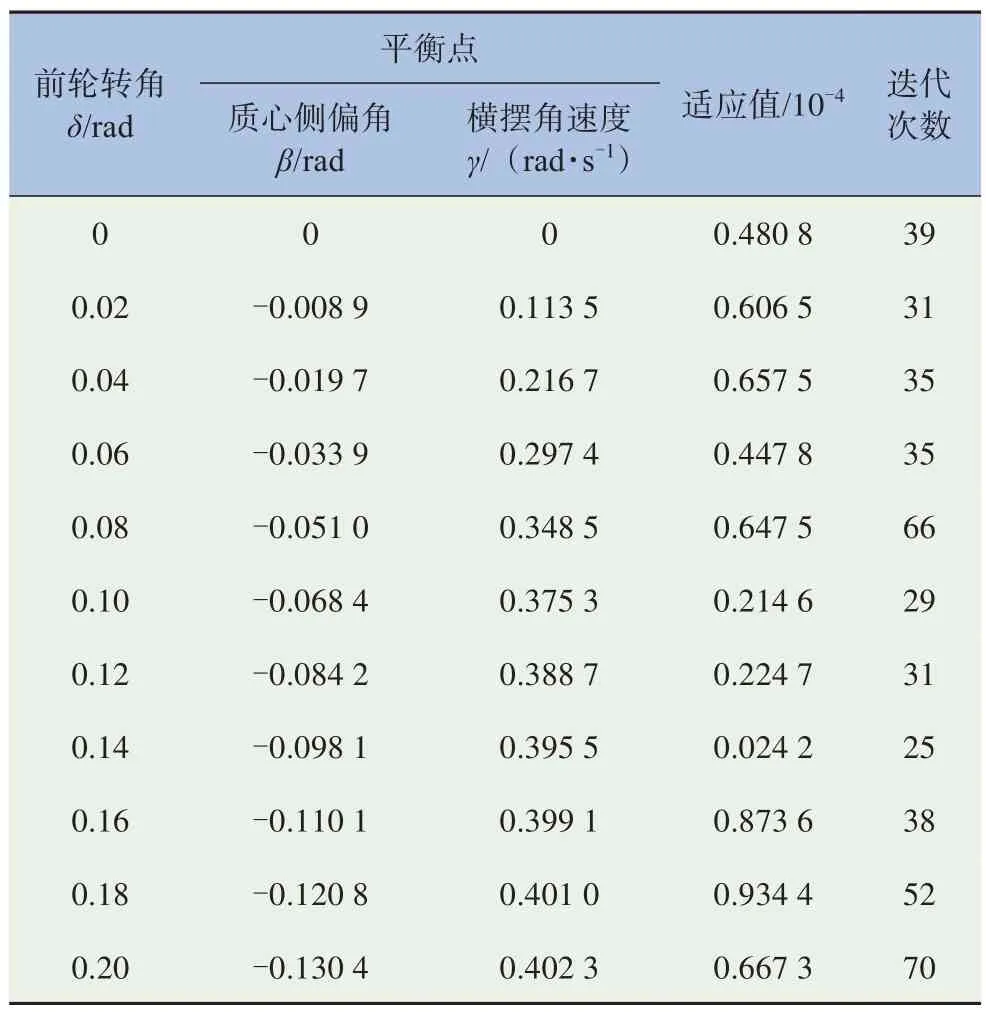
表4 u=70 km/h和μ=0.8時的第2個轉向平衡點
3.3 不同路面附著系數下轉向平衡點求解
選擇從結冰路面到良好路面,路面附著系數μ范圍取0.2~1,以0.1為間隔。考慮到在結冰路面上汽車都會減速慢行,設置車速u為30 km/h,前輪轉角δ為0.1 rad。
求取的轉向平衡點,如表6~8所示。由這些表可以看出,應用粒子群算法求解的平衡點都能滿足設置的精度要求;在某一固定路面附著系數下,一共有3個轉向平衡點;隨著路面附著系數的增大,第1個轉向平衡點β值增大,γ值減小;第2個轉向平衡點的β值增大,γ值增大;第3個轉向平衡點β值增大,γ值減小。

表6 u=30 km/h和δ=0.1 rad時的第1個轉向平衡點
3.4 不同車速下轉向平衡點求解
選擇路面為良好路面,路面附著系數μ設置為0.8,車速u的范圍取30~120 km/h,以10 km/h為間隔,前輪轉角δ為0.1 rad。

表5 u=70 km/h和μ=0.8時的第3個轉向平衡點
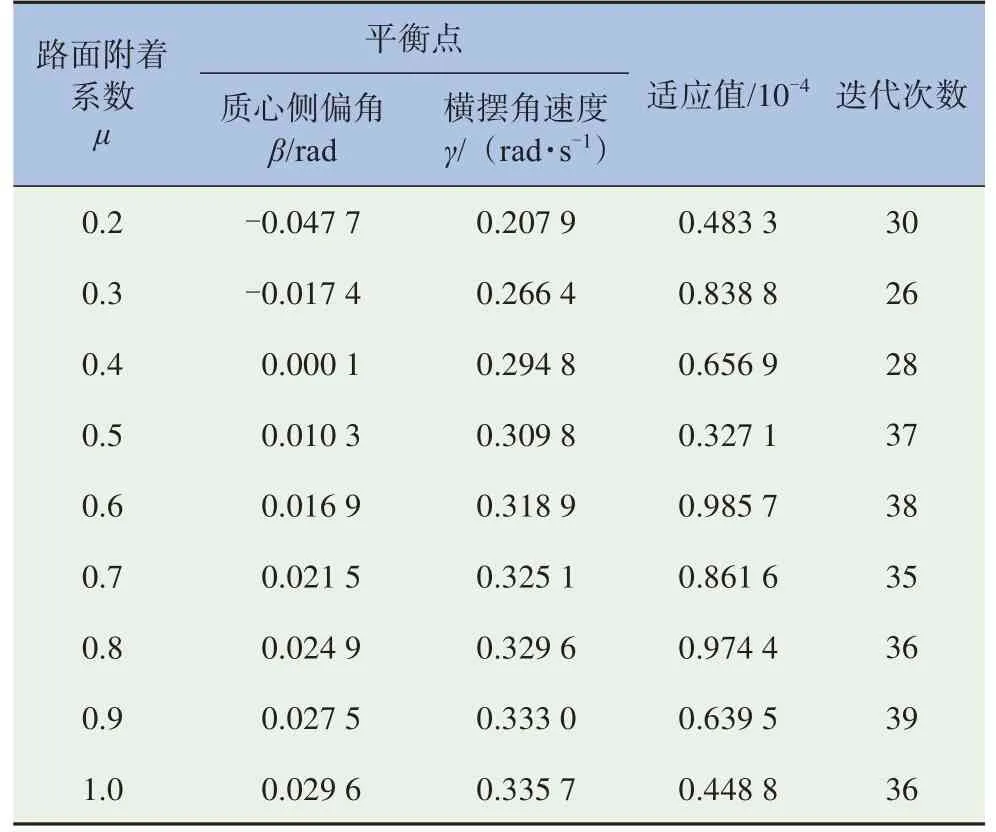
表7 u=30 km/h和δ=0.1 rad時的第2個轉向平衡點

表8 u=30 km/h和δ=0.1 rad時的第3個轉向平衡點
求取的轉向平衡點,如表9~11所示。由這些表可以看出,應用粒子群算法求解的轉向平衡點都能滿足設置的精度要求;在某一固定車速下,一共有3個轉向平衡點;隨著車速增大,第1個轉向平衡點值增大,總體變化不大,值減小;第2個轉向平衡點的值減小,值先增后減;第3個轉向平衡點值減小,值增大。
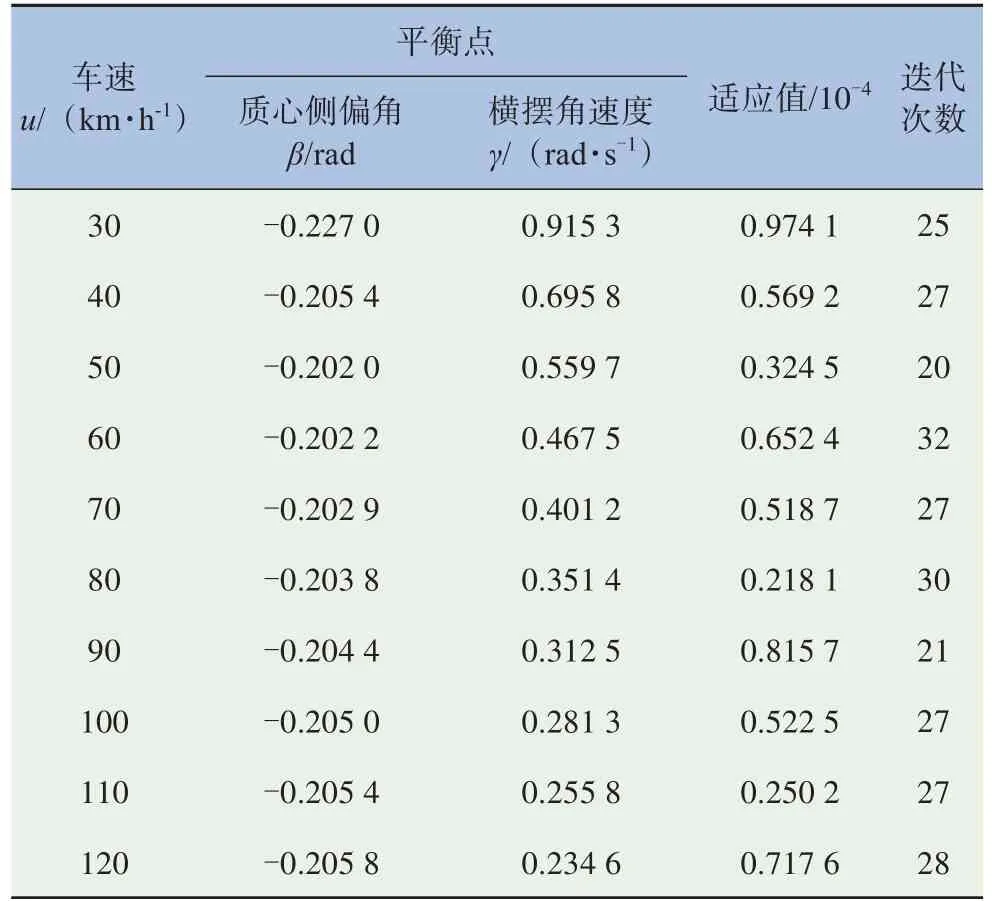
表9 μ=0.8和δ=0.1 rad時的第1個轉向平衡點
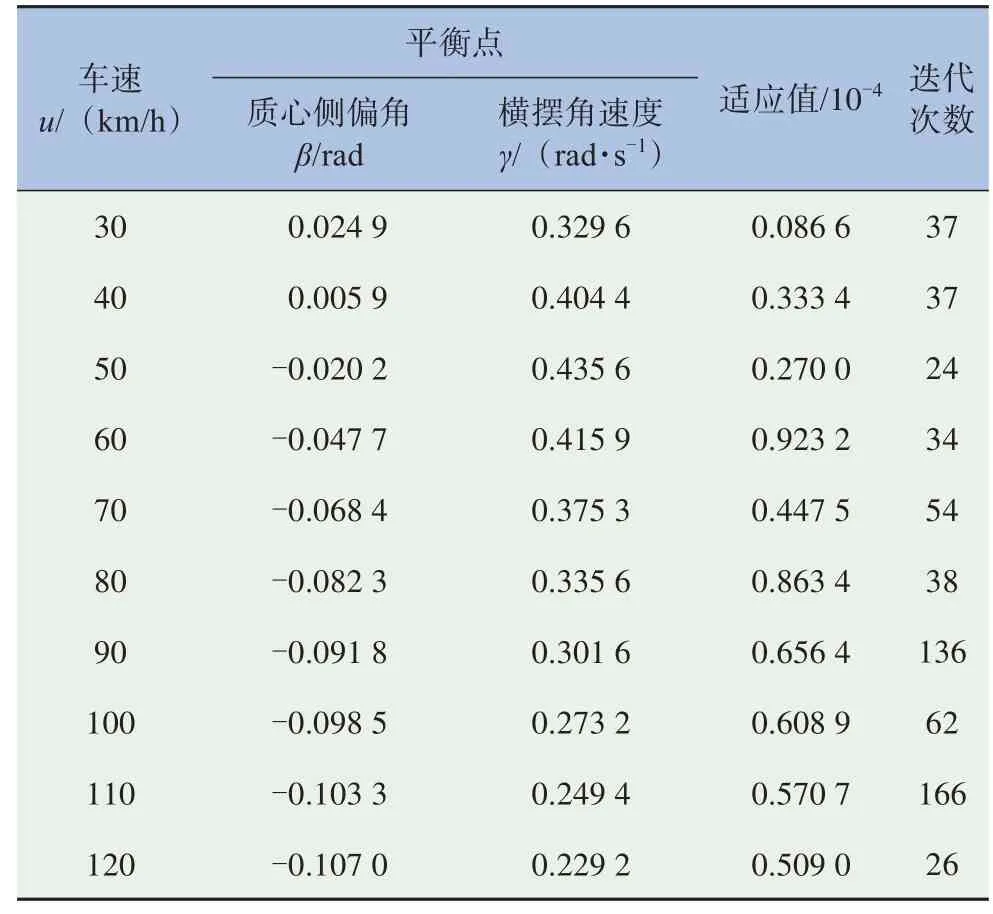
表10 μ=0.8和δ=0.1 rad時的第2個轉向平衡點
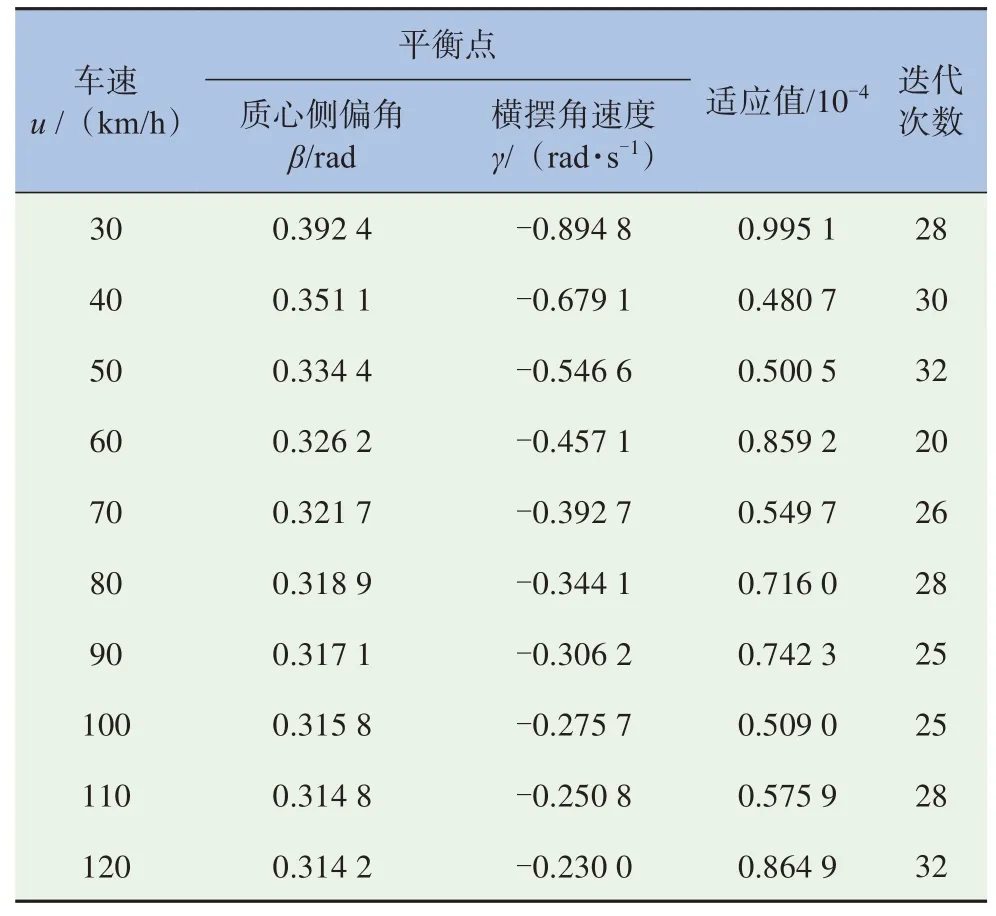
表11 μ=0.8和δ=0.1rad時的第3個轉向平衡點
4結論
(1)建立了汽車轉向非線性2自由度模型,其中由微分方程和狀態方程表示的汽車模型適于任何輪胎模型;給出了轉向非線性平衡點的定義,提出了求解轉向非線性平衡點的粒子群算法,其為智能算法,易于實現和精度較高,可以達到設置的精度要求。
(2)對3種行駛條件下轉向非線性平衡點進行了求解,結果表明,粒子群算法可以求出對應給定精度10-4的3個轉向平衡點;隨著轉角、車速的增加和路面附著系數的減小,轉向平衡點的變化范圍減小,第1個平衡點會和第2個平衡點相互靠近,為后續的汽車轉向非線性穩定性分析與控制提供了前提。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊活動(2021年4期)2021-07-23 01:46:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
決策探索(2014年21期)2014-11-25 12:29:50