機載高光譜技術在浦東新區小流域水質監測中的應用研究
2022-12-10 13:14:56丁奕文
中國資源綜合利用 2022年11期
丁奕文
(上海元易勘測設計有限公司,上海 201210)
隨著城鎮化進程的加快,水質污染已日趨成為制約城市可持續發展的關鍵問題[1]。近年來,城市生態清潔小流域建設逐步得到各級政府的重視,成為城市環境治理的重要一環[2]。目前,生態清潔小流域建設工程主要通過人工巡查和試劑檢測等方法建立區域性的跟蹤驗收評估系統,而水質監測作為衡量評估結果的重要手段,目前仍然以斷面監測(布設固定監測站)為主,這種監測方法精度較高,但其僅能監測站點周圍的水質狀況[3]。常規的斷面監測明顯不能滿足當下城市河道快速、精準溯源的水質監測需求。
近年來,隨著技術的不斷成熟,無人機可以全方位、多角度地進行航拍,其人力消耗低,這為城市生態清潔小流域的動態精細化評估提供了新思路[4]。同時,伴隨遙感技術的不斷進步,高光譜傳感器能夠通過每個像元得到連續的光譜數據,為水質全域動態監測開辟了新途徑[5]。無人機搭載高光譜傳感器,既可以發揮無人機機動靈活的優勢,又可以兼顧高光譜設備的性能,對目標對象進行整體掃描,建立光譜特征和水質指標的關系模型,有效地反演水質指標。本文結合生態清潔小流域水質監測驗收指標的技術要求,選擇上海市浦東新區小流域作為研究對象,以4 個具有代表性的水質參數作為評價指標,即高錳酸鹽指數(CODMn)、總磷(TP)、氨氮(NH3-N)和總氮(TN),對比分析機載高光譜設備反演數據與常規實驗室水質監測數據,為生態清潔小流域的全域水質評估提供數據參考。
1 監測方案設計
研究區位于上海市浦東新區,涉及華漕達河、金家宅河、陸家宅河和張家浜河(主河道)四條河流的局部水域和斷面,監測方案主要分為5 步。
1.1 河道前期踏勘調查
了解河涌長度與寬度,沿岸樹木和房屋分布情況,河段水流、地形地貌與實地飛行條件,然后確定無人機的起降點,標定點位,布設現場采樣點,設計現場采樣方案。
1.2 現場采集水樣
利用機載高光譜傳感器現場采集研究區河涌信息,然后立即在對應監測點采集水樣。本研究同時采集5 個斷面的水樣,詳細點位說明如表1 所示,點位在河道上分布均勻,符合整體反演需要。

表1 水質采樣點說明
1.3 水樣數據分析
對現場同步采集的地表水樣品進行實驗室定量分析,形成地面水質同時間監測數據。
1.4 高光譜分析
根據采樣斷面的實驗室水質監測結果與高光譜數據的對應關系,建立不同污染因子的反演模型,對研究區采集的高光譜數據進行反演,最終形成試點河段連續的高光譜反演結果圖。
1.5 現場走訪,復核反演結果
對高光譜反演結果圖呈現的污染物濃度高的區域進行現場核查,查找原因。
2 高光譜數據采集與分析
本研究采用Resonon Pika L 型高光譜成像儀,其具有高精度、高信噪比和輕量化的特點。利用專業飛行設備搭載,可實現大載重、航時長的作業,為高光譜傳感器的應用提供靈活平臺。本研究采用無人機(大疆精靈4Pro)采集測區正射影像,利用專業拼圖軟件進行試點段及周邊影像拼接。
2.1 河流水質污染因子分布情況
本研究選取CODMn、TP、NH3-N、TN 四個具有代表性的水質參數作為評價指標,5 個斷面的詳細點位及高光譜水質參數反演賦色成果如圖1 所示。
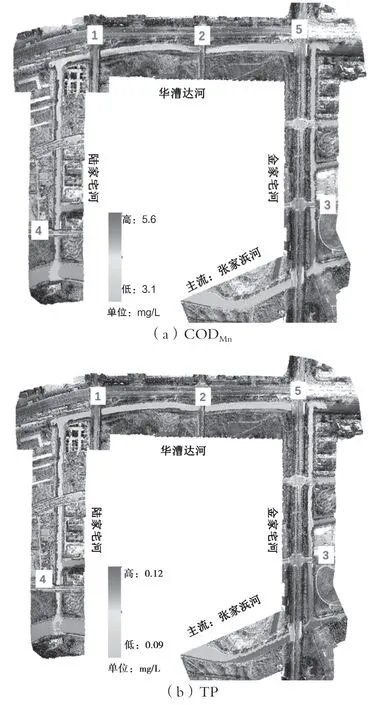
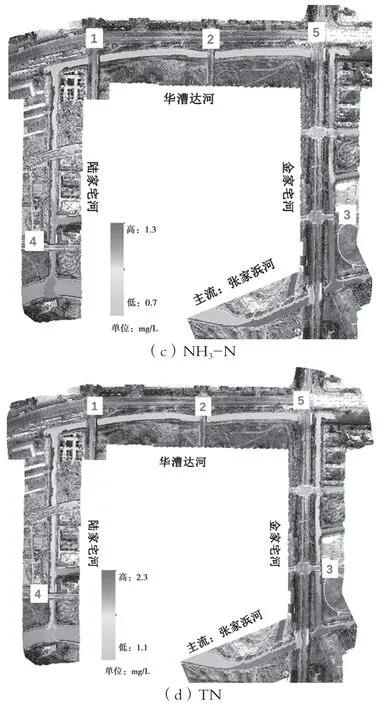
圖1 高光譜水質參數反演賦色成果
反演圖中,對水質污染因子進行賦色,用來區別濃度高低,顏色越深表示濃度越高,顏色越淺表示濃度越低,但不代表水質分類標準。水質需要按照各參數濃度進行分類評價,根據《地表水環境質量標準》(GB 3838—2002),對研究區河道水質進行分類評價。
根據本次高光譜水質參數反演賦色成果,4 條河流各污染因子的濃度區間如表2 所示。CODMn反演值區間為3.1~5.6 mg/L,最高值(5.6 mg/L)出現在華漕達河中段2 號采樣點附近,與實驗室采樣監測結果(5.4 mg/L)基本一致,總體符合《地表水環境質量標準》(GB 3838—2002)的Ⅲ類水標準,這表明該區域水體中有機污染現象較少。TP 反演值區間為0.096~0.120 mg/L,最高值(0.120 mg/L)出現在張家浜河東段匯流口附近,與實驗室3 號采樣點監測結果(0.114 mg/L)基本一致,總體符合Ⅲ類水標準,TP 作為常見的城市水體污染因子,在該區域內未見超標現象。NH3-N 反演值區間為0.67~1.21 mg/L,最高值(1.21 mg/L)出現在張家浜河東段匯流口附近,高于實驗室3 號采樣點監測結果(1.07 mg/L),說明匯流后污染物濃度進一步提升,總體符合Ⅳ類水標準。TN反演值區間為1.45~2.23 mg/L,最高值(2.23 mg/L)出現在張家浜河東段匯流口附近,高于實驗室3 號采樣點監測結果(1.96 mg/L),說明匯流后污染物濃度進一步提升,該區域氮元素含量總體偏高,存在富營養化現象。

表2 4 條河流各污染因子濃度區間
從本次反演情況看,試點河段測區范圍內污染情況相對穩定,未發現數值較為異常的污染點。對比發現,除CODMn外,張家浜河的TP、NH3-N、TN 均比其他3 條河流高,從反演結果可以看出,本次采集時間段內,水質因子的分布是從主河道(張家浜河)向陸家宅河、金家宅河擴散,所以3 條河流對張家浜河的污染貢獻度較低。
2.2 反演問題點
從反演結果可以看出,華漕達河段內,金港路橋和金豫路橋之間水體TP、TN 及NH3-N 相比其他區域比較穩定,但CODMn有明顯波動,局部數據偏高,且呈帶狀分布。高光譜水質參數反演未發現明顯排污情況,懷疑水體滲漏或該種污染已存在一段時間,水體流動緩慢導致污染只在小片區內擴散。后續可以根據本次反演結果按圖索驥,核實附近是否存在污染,逐步排查并摸清污染源。在金家宅河中段,3 號采樣點附近存在2 個污水排口,根據本次高光譜水質參數反演結果,從水質污染因子的分布趨勢來看,3 號采樣點排口兩側賦色變化趨勢相對平穩,未見兩排口對河道有明顯匯入污染,初步判斷在采集時間內排口未有排污。
2.3 高光譜設備反演數據與實驗室水質監測數據對比
經測定,5 個采樣斷面的實驗室水質監測結果如表3 所示。對比實驗室水質監測數據與高光譜設備反演數據(見表2),CODMn、TP、NH3-N 和TN四個水質污染因子的數據分布區間基本一致,華漕達河、金家宅河和陸家宅河未見明顯污染情況。但是,實驗室水質監測數據顯示,從TN 濃度來看,3 條河流水質均為Ⅴ類水,根據反演數據,總氮存在超過Ⅴ類水標準的風險,后續要重點關注區域內居民生活污水、工業廢水等可能引起TN 超標的影響因素。
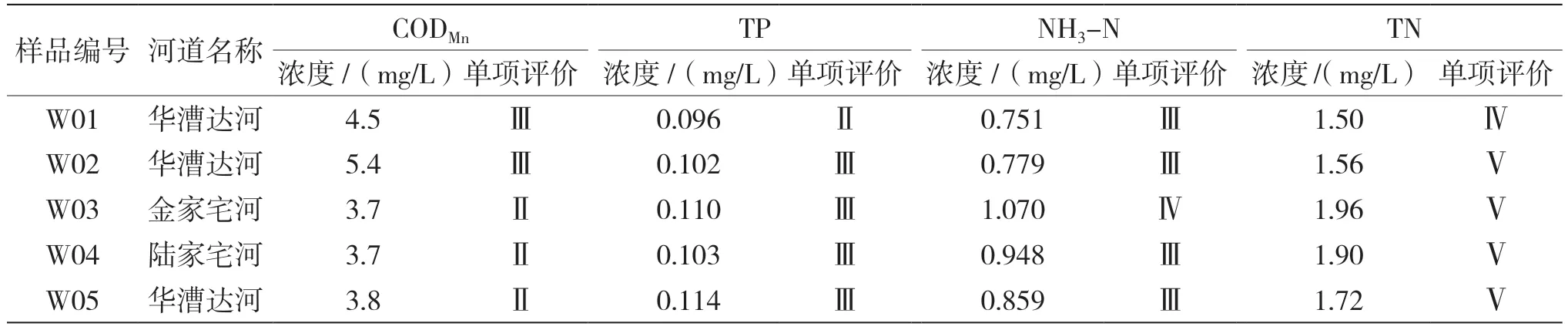
表3 不同采樣斷面的實驗室水質監測結果
3 結論
本研究采用無人機搭載高光譜傳感器的方式采集高光譜數據,采集時,天氣晴朗,高光譜數據整體質量優良。其間采用高光譜設備采集原始光譜,利用定位定姿系統實現精準定位,系統搭載增穩平臺。本次高光譜水質參數反演結果整體變化趨勢較好,能夠說明污染物濃度變化,基本達到預期效果。在試點河段(華漕達河、金家宅河與陸家宅河),無人機搭載高光譜傳感器表現出大尺度、全覆蓋的監測特性,能夠發現污染源分布、污染物遷移特征和影響范圍。與常規水質監測相比,機載高光譜技術能夠監控整條河流,不僅能夠提供水質的連續光譜結果,還能提供監測范圍內任何位置的多個水質指標參考濃度。因此,借助機載高光譜技術,可以快、準、狠地獲取水質異常點位,這對生態清潔小流域的污染精準治理具有重要的指導意義。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
當代水產(2019年1期)2019-05-16 02:42:04
當代陜西(2019年7期)2019-04-25 00:22:18
電子競技(2019年22期)2019-03-07 05:17:26
電子競技(2019年21期)2019-02-24 06:55:52
電子競技(2019年20期)2019-02-24 06:55:35
電子競技(2019年19期)2019-01-16 05:36:09
領導決策信息(2018年26期)2018-10-12 02:18:26
都市麗人(2015年5期)2015-03-20 13:33:49
河南科技(2014年23期)2014-02-27 14:19:07