機載降水云雷達的數據質量控制
2022-12-12 10:48:04左懂飛丁德平趙德龍
成都信息工程大學學報 2022年5期
左懂飛 楊 玲 丁德平 趙德龍
(1.成都信息工程大學電子工程學院,四川 成都 610225;2.北京市人工影響天氣中心,北京 100089)
0 引言
云是大氣中水汽達到飽和后,通過凝結或凝華懸浮在空中一定高度上的由水滴、過冷水滴或冰晶組成的混合物。云的形成與消亡伴隨著大氣垂直運動以及潛熱釋放和吸收,反映大氣的熱力和動力過程,通過形成、發展、移動及消散過程參與全球水循環。云作為重要的氣候因子,通過輻射強迫效應調節地氣系統的能量收支平衡[1-2]。
過去,國內外學者主要利用地基遙感設備(雷達、微波輻射計等)來研究云微物理參數[3-6],后來飛機作為在線觀測平臺[7-9]被廣泛應用。為解決地基雷達與飛機在線觀測在時空上兩者無法同時連續的問題,懷俄明大學研制了機載云雷達[10],集合飛機在線探頭更加精細化地研究了云的宏微觀特征。機載探測設備可以直接進行穿云實驗,獲取云內微物理參數,對理解研究云的形成、云微物理參數以及對人工影響天氣的指導和評估都起著重要作用。
機載雷達在觀測過程中,可以根據云層位置,在不同的云層高度進行穿云探測,具有較強的靈活性。目前,常見的機載云雷達有機載Ka波段云雷達、機載W波段和X波段雷達。2010年,商建等[11]利用GPS探空數據和地基12通道微波輻射計觀測亮溫分析得到的液態水廓線,對實驗中的機載Ka波段降水雷達進行衰減訂正。吳瓊等[12]利用機載雙頻雷達(Ku/Ka波段)進行了降水反演算法的相關研究。陳廷娣等[13]利用TRMM衛星與機載雷達對降雨數據進行了對比分析。Pazmany等[14]利用機載W波段雷達和GVR進行云參數的反演。Wolde等[15]利用NRC的機載W波段、X波段雷達和183 GHz G波段水汽輻射計(GVR)進行觀測,并使用在線云物理測量數據,驗證機載W波段雷達和GVR反演是否一致。Damiani等[16]利用機載雷達收集的數據,開發了一種新技術,并將其用于二維風場的合成。
1 機載降水云雷達簡介
機載降水云雷達(Ka-band precipitation cloud radar,KPR)安裝在北京市人工影響天氣中心 Kingair350飛機探測平臺上,是美國ProSensing Inc公司生產的一種機載云雷達,是一個裝在粒子測量系統(PMS)中的緊湊型、雙波束、固態發射機的多普勒雷達。KPR安裝在北京市人工影響天氣中心空中國王飛機的機翼上(圖1),KPR具體參數如表1所示。KPR傳輸線性調頻波形和頻率為60 MHz的短脈沖偏移兩種波形,利用10 W峰值功率固態放大器來傳輸調制這兩個長短脈沖,計算兩個脈沖間的接收信號。線性調頻波形用于遠距離測量,而短脈沖用于近距離測量,將長短脈沖結合可提高靈敏度。KPR有兩個天線,一個向上,一個向下,采用線性極化平板陣列,用于在飛機上方和下方進行測量,可連續觀測云的水平垂直結構變化。KPR使用標準脈沖對算法測量反射率(dBZ)、多普勒速度和多普勒寬度。
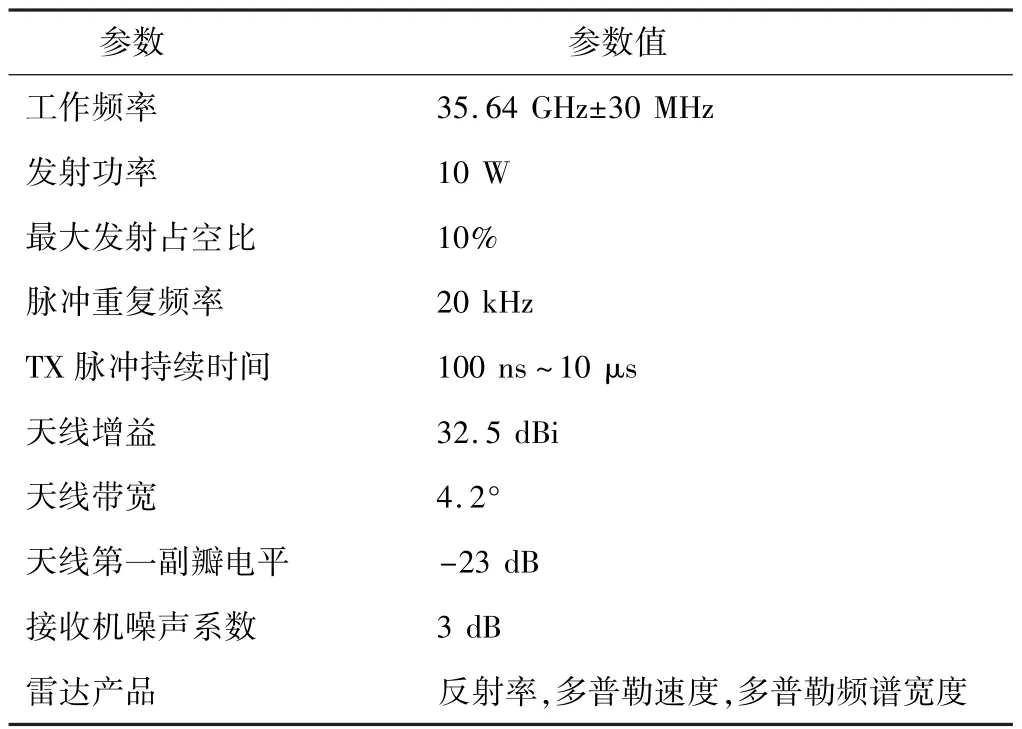
表1 KPR參數
2 工作原理
KPR可以在多種模式下工作,包括脈沖對處理和FFT全頻譜處理。在脈沖對模式下,KPR分為3種工作模式:在Up模式下(圖2a),雷達只通過向上的天線發射和接收信號;在 Down模式下(圖2b),雷達只通過向下的天線發射和接收信號;在 Up&Down模式下(圖2c),雷達通過向上和向下的天線交替發射和接收信號。一般情況默認使用上下天線同時測量。
多天線機載氣象雷達的掃描停留時間較短,而脈沖對返回信號的傳輸和處理非常適合這樣短的數據采集時間。在脈沖對模式下,計算 lag-0(m=0)和 lag-1(m=1)和 lag-3(m=3)的信號相關性。在這些變量中,有信號功率、相干信號功率以及多普勒速度和譜寬。使用脈沖序列,可以測量在lag-0和lag-1和lag-3時雷達接收信號的復數自相關函數R(mTs),進而可以估計出雷達的反射率、多普勒速度和譜寬。
其中,Ps和Pn分別為信號功率和噪聲功率,ρ(mTs)為相關系數,而

譜寬σD可根據高斯形狀的天氣信號功率譜近似于:
和大多數天氣雷達一樣,KPR也是通過相關的技術校準提供等效的雷達反射率因子:
雷達反射率因子可以用Cη和測得的功率表示為

最后可得校準后的雷達反射率因子:
3 KPR軌跡訂正及雜波濾除
圖3和圖4是KPR探測到的兩個不同云類型的原始產品圖。KPR顯示的視角是以飛機位置為基準(顯示高度為0 km),向上探測高度值為正,向下探測高度值為負,上下各有516個距離庫,庫長為15 m,剔除掉無用的距離庫(上下各51個),總距離庫為930個,探測范圍約為13950 m。
從KPR的產品圖可以看出,在無云處存在很多的背景噪聲,為消除其他區域雜波的影響,需要對 KPR原始產品進行濾波處理。而高斯濾波器是一種線性濾波器,能有效抑制噪聲,平滑圖像。其原理是取濾波器窗口內的像素的均值作為輸出,高斯濾波器的模板系數,隨著距離模板中心的增大而減小,對圖像的模糊程度較小。
對于高斯濾波,二維高斯函數(原點為中心):
其中(x,y)為點坐標,在圖像處理中可認為是整數,σ是標準差。要想得到一個高斯濾波器的模板,可以對高斯函數進行離散化,得到的高斯函數值作為模板的系數。對于窗口模板的大小為(2k+1)×(2k+1),模板中各個元素值的計算公式如下:
其中,σ是高斯濾波器最重要的參數,σ越大,高斯濾波器的頻帶就較寬,對圖像的平滑程度就越好。通過調節σ參數,可以平衡圖像的噪聲抑制和圖像的模糊。通過高斯濾波,可以濾除掉KPR產品圖中多余的背景噪聲。
KPR的原始產品圖是以機載雷達為中心的掃描視角,與常規的基地云雷達的產品圖存在明顯差異,為更好地判斷云頂云底等信息,需要把機載雷達的產品圖轉換為地面觀測形式,因此需對飛機軌跡進行訂正。根據機載氣象探測系統(AIMMS-20)記錄的飛行高度,軌跡訂正將 KPR探測的高度值訂正到海拔高度上。KPR的時間分辨率為0.2 s,而AIMMS-20的時間分辨率是1 s,將兩者進行時間匹配,以獲取每個徑向上對應的飛機高度。KPR記錄的高度是每個徑向下距離庫到飛機的距離,根據每個徑向上的飛機飛行高度依次減去(加上)飛機下方(下方)每個距離庫到飛機的距離就可以得到飛機下方(上方)真實的海拔高度。
當KPR上下掃描時,在飛機上下300 m左右存在一個探測盲區,這是由于 KPR在發射和接收脈沖信號時,產生的噪聲和增益使得飛機軌跡處的探測值較大。為了剔除飛機軌跡處的噪聲,獲取真實的探測數據,采用二次樣條插值,對飛機軌跡處的噪聲和增益進行處理。
圖5和圖6分別為20191022和20190921架次經過數據質控制后的KPR產品圖,可以看出消除了背景噪聲的干擾,產品圖質量明顯改善,能更清晰地看出云回波的整體輪廓。經過二次樣條插值,消除了飛機軌跡噪聲和增益,獲得飛機軌跡處真實的雷達產品數據。
對于圖5(a),KPR探測到的云類型為層狀云降水,在海拔3 km左右有一條清晰的融化層亮帶,該時段飛機主要位于海拔5.8 km,降水較為穩定。對于圖5(b),速度圖在融化層上下有明顯的“分層”現象,在融化層以上速度值較大,約5~8 m/s,在融化層以下,速度值較小,約2~-2 m/s。對于圖6(a),KPR探測到的云類型為對流云降水,可以看出,本次共觀測到4個對流云單體。從時間序列上結合回波強度來看,第1、3個單體回波相對較弱,還處在發展中,而第2、4個對流云單體回波整體較強。在海拔2 km左右,最大回波達到了35 dBZ,相對發展成熟。由于對流云不穩定,沒有融化層亮帶的形成,速度圖沒有明顯的“分層”現象,對于圖6(b),KPR測量的速度值約為-3~8.5 m/s。
一般情況,在融化層以上,云中粒子多為冰晶雪花,粒子下落速度較小,而在融化層,云中多為尺度較大的降水粒子,下落速度較大。但是結合KPR測量的速度圖來看,這與實際情況不符,主要是因為 KPR安裝在飛機上,導致KPR測量的多普勒速度受飛機運動的影響。在下一節中,將對測量的多普勒速度和譜寬進行訂正。
4 多普勒速度和譜寬的訂正
多普勒速度是在天線波束方向測量的,因此,速度圖是測量水成物的垂直速度。原始的多普勒速度和譜寬數據受飛機運動的影響,需要對原始的多普勒速度和譜寬進行修正。
當雷達安裝在一個移動平臺上(如飛機),通常會有一個小的偏移,導致天線波束相對于飛機速度矢量傾斜。多普勒速度的偏移:
其中,θoffset是KPR天線波束相對垂直于飛機速度矢量的偏移量,為了得到訂正后的多普勒速度,結合式(14),有
其中,V'為修正后的多普勒速度,V為修正前原始的多普勒速度。
原始數據測得的譜寬σV是由水成物譜寬(σS)和平臺運動產生的譜寬組合(σPM)而成,即
平臺運動引起的譜寬可以從天線波束寬度和飛機的速度中估計出來,天線主波束分布可近似為高斯分布:
天線的方向近似垂直于平臺的速度矢量,有限天線波束寬度產生的多普勒速度與平臺速度θV0=v和以弧度表示的波束角度θ有關(假設小于0.1)。假設散射體在樣品體積中分布均勻,運動誘導的多普勒速度譜形狀可以近似為
其中,由于平臺運動產生的標準譜寬σPM為
KPR天線的半功率波束寬度為4.2°,約等于0.0733 rad,即
因此,對于KPR則有
根據以上相關理論,可以對原始速度和譜寬進行訂正。圖7(a)為20191022架次訂正后的多普勒速度,在融化層以上,由于溫度低于0℃,云中粒子更多的是以冰相粒子(冰晶、雪花)的形式存在,冰相粒子的下落速度較小,從圖中可以看出,融化層以上,粒子下落速度在-1~1 m/s。在融化層以下,存在著降雨,粒子下落速度比較大,在-6 m/s左右。訂正后的多普勒譜寬如圖7(b),譜寬較高的區域可能是因為該區域有較高的湍流,也可能是因為不同尺度的降雨粒子產生不同大小的速度。即小液滴下落速度低,譜寬小,大液滴有較大的下落速度,譜寬大。
圖8(a)為20190921架次訂正后的多普勒速度,第1、2、4個對流云單體,粒子下落速度在-8~2 m/s,特別是在海拔4 km以下的對流區域,存在較大的雨滴,此時粒子下落速度較大,約為-4~-8 m/s;在4 km以上,粒子下落速度較小,約為-2~1.5 m/s。對于第3個對流云單體,在海拔4 km以下,云中粒子速度約為-6~4 m/s;在4 km以上,粒子下落速度約為-2~2 m/s。訂正后的多普勒譜寬如圖8(b)所示,譜寬較大的區域可能是由于不同尺度的降雨粒子產生不同大小的速度導致的。
本文統計了數據質控前后飛機軌跡探測盲區附近300 m處的反射率的均值和標準差以及所有高度上速度和譜寬的均值和標準差[16]。從表2可以看出,訂正前后的反射率平均值分別為16.04 dBZ、11.26 dBZ,標準差分別為9.81 dBZ、8.45 dBZ,消除了軌跡噪聲的干擾,反射率平均值和標準差分別下降了4.78 dBZ和1.36 dBZ。訂正前后的多普勒速度平均值分別為0.52 m/s、-5.42 m/s, 標準差分別為15.64 m/s、14.37 m/s,多普勒速度平均值和標準差分別下降了5.9 m/s和1.27 m/s。訂正前后的譜寬平均值分別為2.83 m/s、1.37 m/s,標準差分別為3.26 m/s、1.46 m/s,譜寬平均值和標準差分別下降了1.46 m/s和1.8 m/s。經過數據質量控制,訂正后的速度和譜寬質量明顯改善,但也存在一定誤差,其主要原因是飛機姿態的未知誤差和KPR波束指向矢量精度較低[10]。

表2 KPR數據質量控制前后結果對比
5 結束語
介紹了北京市人工影響天氣中心King-air350飛機探測平臺上搭載的新型機載降水云雷達,對KPR的工作原理以及相關技術指標進行了說明。通過收集到的兩個不同架次的數據,對KPR的產品進行了濾波處理與飛機軌跡訂正,完成了多普勒速度和譜寬的訂正。結果表明,經過濾波處理與飛機軌跡訂正的KPR產品圖,質量明顯改善,能更清晰直觀地獲取云的宏觀特征。訂正后的速度和譜寬質量明顯改善,但也存在一定誤差,在后續的工作中,考慮結合地基雷達進行匹配,或根據粒子下落速度與直徑的關系,開發出一套更合理的算法來實現更精準的訂正效果。
相較于地基雷達,KPR有著較高的分辨率和探測靈活性,能克服時空匹配,更好的結合飛機在線測量進行聯合觀測,具有很高的利用價值,能更加精細化的研究云的宏微觀特征。在未來的工作中,我們會通過雷達數據對比分析與反演,聯合飛機在線測量,進一步給出詳細分析。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04