高精度電容式棒位測量傳感器靜態特性研究
2022-12-16 03:28:30李彥霖秦本科薄涵亮
原子能科學技術 2022年12期
關鍵詞:測量
李彥霖,秦本科,薄涵亮
(清華大學 核能與新能源技術研究院,北京 100084)
控制棒水壓驅動系統是清華大學核能與新能源技術研究院自主研發的新型、內置式控制棒驅動系統,該驅動系統能降低反應堆高度、避免彈棒事故,已應用于一體化布置核反應堆[1-2]。棒位測量傳感器是該驅動系統的關鍵測量部件,其測量精度和可靠性直接關系到核反應堆的安全性。已有多種利用不同測量原理工作的傳感器應用于控制棒棒位測量[3]。壓水堆核電廠廣泛采用電感式棒位測量傳感器,該傳感器基于電磁感應原理,將控制棒棒位轉換為數字信號并以GRAY碼的形式輸出,優點是具有較強的抗干擾能力,缺點是引線數量較多和設備可靠性較低,最高測量精度為±4步[4]。高溫氣冷堆采用自整角機式棒位測量傳感器,該傳感器將控制棒線位移轉換為角位移進行測量,缺點是系統響應速度較慢、系統加工精度要求高和檢驗、標定困難,最高測量精度為±4 mm[5]。磁致伸縮式傳感器可用于內置式棒位測量,該傳感器利用磁致伸縮原理,通過兩個不同磁場相交產生一個應變脈沖信號測量棒位,優點是可在高溫、高輻照環境下工作,缺點是維修較為困難,最高測量精度為1.2 mm[6]。此外,熱電偶式[7]、超聲波式[8]、中子探測器式[9]等傳感器也可用于棒位測量。
電容式傳感器在工業測量領域有廣泛應用,其優點是成本低、結構簡單、可實現連續和非侵入測量、動態響應特性好等,該傳感器具有的上述優勢使其在內置式棒位測量領域具有極佳的應用前景。Bo等[10]率先將電容式傳感器應用于內置式棒位測量。Hu等[11]設計了兩直電極電容式棒位測量傳感器,通過開展靜態特性實驗,論證了電容式傳感器應用于棒位靜態測量的可行性。Bo等[12-13]設計了雙螺旋結構電容式棒位測量傳感器,通過開展靜態、動態特性實驗,分析了該傳感器的測量誤差,論證了電容式傳感器應用于落棒測量的可行性,但上述兩種傳感器的靜態測量誤差均不能滿足棒位測量不失步的要求。Li等[14]分析了雙螺旋結構電容式棒位測量傳感器各設計參數與測量誤差間的關系,完成了該傳感器的結構優化。
電容式棒位測量傳感器在靜態測量過程中,傳感器電容與被測桿軸向(棒位)、徑向(偏心)位置有關[15]。棒位一定時,被測桿徑向位置的改變將給傳感器引入一個與棒位無關的電容變化量,該電容變化量將給傳感器引入測量誤差,稱為被測桿偏心誤差。200 MW核供熱堆的控制棒單步步進距離為15 mm,共設置0~56號共57個棒位,滿足棒位測量不失步的誤差限值為±7.5 mm。為滿足棒位測量不失步的要求,克服已有傳感器設計方案的缺點,需提出測量精度與可靠性高、測量原理簡單的電容式棒位測量傳感器設計方案。
本文提出能將被測桿步進與偏心所引發的電容變化量實現分離的測量方法,設計四螺旋電極電容式棒位測量傳感器。針對該傳感器,利用有限元方法建立理論模型,開展靜態特性實驗,進行誤差分析并完成傳感器的優化。
1 傳感器結構及測量方法
1.1 傳感器結構
四螺旋電極電容式棒位測量傳感器如圖1所示。該傳感器主要由4部分組成,分別為4塊同螺距的螺旋電極、控制棒被測桿、絕緣陶瓷管、屏蔽層。其中被測桿材料為PAI 4203,相對介電常數εr1=4.2、半徑R1=7 mm、長度D1=1 000 mm。陶瓷管材料為α-AL2O3,相對介電常數εr2=9.6,內外半徑分別為R2=8 mm、R3=12 mm,長度D2=938 mm,屏蔽層半徑R4=14.5 mm。圖1中1號激發電極與1號檢測電極組成1號電極對,兩電極同張角,定義為α。2號激發電極與2號檢測電極組成2號電極對,兩電極同張角,定義為β。4塊螺旋電極螺距定義為H。

圖1 四螺旋電極電容式棒位測量傳感器Fig.1 Four-helix electrode capacitance rod position measurement sensor
1.2 測量方法
首先給出電容式棒位測量傳感器的測量原理。控制棒頂部與被測桿剛性連接,在靜態測量過程中,被測桿以一定的步進單位沿陶瓷管內環形腔進行軸向運動,由此改變電極間的相對介電常數分布,引發傳感器電容的變化。通過對測量得到的各棒位處的電容進行擬合,可建立電容與棒位的函數關系,由此對于任意棒位,可將其電容代入函數關系式中,計算得到相應棒位。
由圖1可知,被測桿與陶瓷管內壁存在間隙,被測桿偏離陶瓷管中心軸后,將改變電極間的相對介電常數分布函數,并引發傳感器電容發生變化,表明傳感器電容與被測桿軸向、徑向位置均有關。為準確測量棒位,需要傳感器能準確分辨出被測桿所處的軸向位置。為此本文提出了能實現“偏心-步進”電容變化量分離的測量方法。假定被測桿偏心時,為整體偏心工況,被測桿與陶瓷管中心軸保持平行,且忽略被測桿偏轉方向的影響,則處于任意位置的被測桿可由棒位X與偏心位移L唯一確定,X的取值范圍為控制棒行程,L的取值范圍為0~1 mm。對于兩個未知量,至少需要兩個方程才能進行求解,為此本文提出了四螺旋電極電容式棒位測量傳感器的設計方案。該傳感器由2組共4塊電極構成,如圖1中所示的1號電極對與2號電極對。在測量過程中,對于處于任意位置的被測桿,首先由1號電極對進行測量,2號電極對保持懸空狀態,由此可得到一個電容C1,而后交換1號電極對與2號電極對的狀態,得到電容C2,C1和C2均為X與L的函數,如式(1)、(2)所示。通過對兩式進行反解,并消去兩方程中的L,可得到X與C1、C2的函數關系。
C1=f1(X,L)
(1)
C2=f2(X,L)
(2)
2 理論模型建立與驗證
2.1 理論模型建立
基于求解拉普拉斯方程,建立電容式棒位測量傳感器的理論模型。通常假定傳感器檢測場內無自由分布的空間電荷,則檢測場的電勢分布函數滿足泊松方程,如式(3)所示:
(3)
其中:φ(x,y,z)為空間電勢分布函數;ε(x,y,z)為隨空間坐標變化的相對介電常數分布函數。依據φ(x,y,z),在檢測電極上感應出的電荷量Q可由式(4)計算:
(4)
電極間的電容C為電荷量Q與電極電勢差U的比值,如式(5)所示:
C=Q/U
(5)

依據傳感器的實際使用工況,指定求解靜電場的第一類邊界條件,激發電極為1 V,檢測電極與屏蔽層為0 V,如式(6)所示:
(6)
對于四螺旋電極電容式棒位測量傳感器,現有的解析模型難以對該傳感器的靜態特性進行準確計算[16]。且電容式傳感器的檢測場屬于典型的“軟場”[17],即被測介質的性質及分布會影響傳感器的檢測場特性,故采用有限元方法對該傳感器進行分析計算。
利用有限元方法建立該傳感器的理論模型,分為以下5步:選定物理場;建立幾何模型;定義材料相對介電常數;指定邊界條件;網格劃分與結果后處理。物理場采用程序AC/DC模塊的靜電單元。傳感器幾何結構與材料物性依照各計算工況建立。為盡量減小模型外空氣域體積對計算結果的影響,在模型外建立空氣域并指定為無限元域。以終端邊界定義激發電極與檢測電極,并分別指定1 V與0 V,以懸浮電位邊界定義懸空電極,以接地邊界定義屏蔽層。
2.2 靜態特性實驗與理論模型驗證
依據本文1.2節中所述的測量方法,在棒位一定時,要求能對C1與C2兩個電容進行輪流測量,但實驗室目前用于電容測量的棒位測量樣機尚不具備該能力。故在實驗室條件下,開展帶懸空電極的多電極電容式棒位測量傳感器的靜態特性實驗,進行理論模型驗證。之后采用該理論模型,對四螺旋電極電容式棒位測量傳感器開展誤差分析與結構優化。
電容式棒位測量傳感器的實驗平臺包含4個部分,如圖2所示。分別為被測桿驅動機構及光柵位移傳感器平臺、電容式棒位測量傳感器及傳感器固定平臺、數據采集處理程序、棒位測量樣機。其中光柵位移傳感器游標跟隨被測桿運動并提供棒位真值,該傳感器的測量精度為±0.005 mm。棒位測量樣機負責電容的采集測量,并通過數據處理程序將測量結果傳遞至PC機。

圖2 電容式棒位測量傳感器實驗平臺Fig.2 Experimental platform of capacitance rod position measurement sensor
依照設計參數制成多電極電容式棒位測量傳感器,該傳感器結構如圖3所示。對于圖3,A為多電極電容式棒位測量傳感器、B為屏蔽層、C為被測桿。該傳感器的8條直電極平行排列,由5 mm寬的銅膠帶制成,換算后電極張角為23.87°。

圖3 多電極電容式棒位測量傳感器Fig.3 Multi-electrode capacitance rod position measurement sensor
傳感器有效量程為0~795 mm,在進行靜態特性實驗過程中,被測桿以15 mm為1個步進單位,與NHR-200控制棒單步步進距離一致,進行了被測桿上、下行實驗。被測桿由傳感器入口向其內部運動定義為上行實驗,下行實驗方向與之相反。以任意兩塊相對排布的電極作為激發電極與檢測電極,其余6塊電極保持懸空狀態,這與本文提出的四螺旋電極電容式棒位測量傳感器的實際使用工況一致。依照該傳感器的實際參數,按照2.1節中所述的建模方法,建立了該傳感器的理論模型,理論模型建模參數與實驗工況一致。首先驗證網格無關性,指定被測桿處于0 mm棒位,通過調整網格尺寸,共構建出4套網格,網格無關性驗證結果列于表1。由表1可知,當網格數量大于1 784 330時,其與4號網格計算所得的電容之間的相對誤差已小于千分之一,從保障計算精度以及節省計算資源的角度考慮,認為采用3號網格選定的網格剖分方式進行后續計算合理可靠。
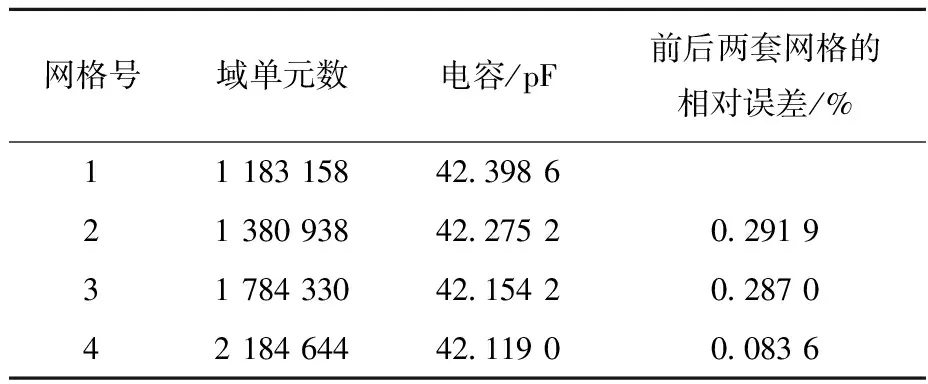
表1 網格無關性驗證結果Table 1 Grid independence verification result
將理論模型計算結果與實驗結果中上、下行零號棒位電容進行置零處理后,模型驗證情況如圖4所示。零號棒位的含義是傳感器有效量程內測量的第1個棒位,將該棒位電容進行置零處理的原因分析如下:激發電極、檢測電極與棒位測量樣機間以引線連接,引線間形成的電容并聯于電極間電容,該并聯電容將改變所測電容的絕對值,但不會對被測桿步升、步降所引發的電容變化量產生影響,理論模型并未考慮引線間的雜散電容,因而將零號棒位電容置零,以消除雜散電容的影響。

圖4 多電極電容式棒位測量傳感器模型驗證結果Fig.4 Model validation result of multi-electrode capacitance rod position measurement sensor
由圖4可知,被測桿上、下行數據符合良好,由上、下行實驗數據擬合得到的傳感器靈敏度分別為0.003 263 pF/mm和0.003 255 pF/mm,相對誤差為0.25%,實驗結果復現性良好。上、下行實驗各得到的54個棒位的電容全部落入模型計算結果的±10%誤差帶內,由模型計算得到的傳感器靈敏度為0.003 508 pF/mm,與上、下行實驗得到的靈敏度的相對誤差分別為7.51%和7.77%,證明了該理論模型對帶懸空電極的棒位測量傳感器的分析結果合理可靠。
3 誤差分析與結構優化
3.1 偏心規律分析與函數擬合
依據1.2節中所述的測量方法,得到式(1)、(2)的解析形式是實現該測量方法的第1步。給出四螺旋電極電容式棒位測量傳感器的設計參數,參照圖1,設定α=60°、β=100°、H=210 mm。依據傳感器設計參數,L=0 mm為被測桿與陶瓷管中心軸重合,L=1 mm為被測桿與陶瓷管內壁完全貼合。對于圖1,定義坐標原點位于陶瓷管圓心,沿正y方向,設定L的計算區間為0~0.9 mm,以0.1 mm為計算單位。對于任意L,定義陶瓷管入口處為0 mm,棒位X的計算區間為15~855 mm,共840 mm,以15 mm為計算單位。將第1個棒位置于陶瓷管入口后15 mm,是為了盡量減小傳感器的邊緣效應。計算某一電極對電容時,另一電極對保持懸空,共得到1 026 個電容,由此分析C1、C2與X、L的函數關系。1號電極對與2號電極對隨X、L變化的電容計算結果如圖5所示。
由圖5可知,對于任意電極對,電容與X、L相關。對于任意L,電容與X正相關,對于任意X,電容與L正相關。且1號電極對與2號電極對在840 mm區間內引發的電容變化量不同。基于傳感器的靈敏度函數,分析式(1)、(2)的解析形式。首先給出傳感器靈敏度S的定義,如式(7)所示。

圖5 電極對計算結果Fig.5 Calculation result of electrodes group
S=ΔC/ΔX
(7)
其中:ΔX為棒位變化量;ΔC為隨ΔX變化的傳感器電容變化量。
通過式(7),在忽略傳感器非線性誤差的前提下,可建立傳感器的靈敏度函數,該靈敏度函數如式(8)所示。
CX,L=C0+SLX
(8)
其中:CX,L為隨X、L變化的電容;SL為隨L變化的傳感器靈敏度;C0為陶瓷管內無被測桿的電容。
由式(8)可知,需建立SL與L的函數關系式,才能得到式(1)、(2)的解析關系。對圖5的計算結果進行整理,隨L變化的SL列于表2。

表2 靈敏度分布Table 2 Distribution of sensitivity
依據表2計算結果,采用冪函數形式進行數據擬合,如式(9)、(10)所示。SL,1、SL,2分別為1號電極對、2號電極對隨L變化的靈敏度。
SL,1=a1L^b1+c1
(9)
SL,2=a2L^b2+c2
(10)
利用MATLAB的cftool工具箱,對6個待定系數進行最佳擬合,分別為a1=0.000 303、b1=2.202 543、c1=0.004 820、a2= 0.000 377、b2=2.157 169、c2=0.009 566。經函數擬合后,式(9)、(10)的決定系數分別為R2=0.999 8、R2=0.999 9。將式(8)~(10)分別代入式(1)、(2),可求得其解析形式,如式(11)、(12)所示。C0,1、C0,2分別為由1號電極對、2號電極對測量時,陶瓷管內無被測桿的電容。
C1=C0,1+(a1L^b1+c1)X
(11)
C2=C0,2+(a2L^b2+c2)X
(12)
為簡化函數形式,并提高棒位測量樣機對于X的計算速度,令式(11)、(12)中b1=b2,消去兩式中L后,可直接得到C1、C2與X的函數關系,如式(13)所示。
(13)
通過式(13),對于處于任意棒位的被測桿,利用1.2節中所述測量方法,可由C1、C2唯一確定一個X。以圖5所示的計算結果,利用MATLAB程序進行最佳擬合,求取式(13)中的待定系數,擬合后結果如式(14)所示。經函數擬合后,式(14)的決定系數為R2=0.999 9。
X=-379.371 909C1+
295.727 348C2-67.871 195
(14)
3.2 誤差分析
利用式(14),將圖5結果代入求解X,并將X與真實棒位的差值作為測量誤差N,結果如圖6所示。

圖6 函數擬合誤差分析Fig.6 Error analysis of function fitting
由圖6可知,最大誤差為-3.01 mm,遠小于±7.5 mm的誤差限值。在同一棒位,N隨L的增大而增大。對于同一L,N與X近似呈周期性變化規律。對該周期性變化規律原因進行分析,對于直電極電容式棒位測量傳感器,其存在的主要問題為偏心不一致,即被測桿向不同方向偏移同一程度,與被測桿無偏心電容之間的電容變化量不同。故對于直電極電容式棒位測量傳感器,當被測桿向不同方向偏移同一程度時,其偏心誤差并不相同,該問題被稱為偏心不一致問題。直電極型電容式棒位測量傳感器的偏心不一致問題如圖7所示。雙螺旋結構電容式棒位測量傳感器的提出,能有效減小偏心不一致問題,即被測桿向不同方向偏移同一程度時,與被測桿無偏心時相比,引發的電容變化量之間的不同遠小于直電極型電容式棒位測量傳感器的,故對于雙螺旋結構電容式棒位測量傳感器,當被測桿向不同方向偏移同一程度時,能有效限制偏心不一致問題,但由于螺旋電極存在螺距,被測桿偏轉方向固定后,其單步步進引發的電容變化量依然存在著微小不同,且該變化量與螺距相關,這是導致N與X近似呈周期性變化的原因。分析圖6可知,波峰與波谷間距近似為1/4螺距。

圖7 偏心不一致問題Fig.7 Problem of eccentric inconsistency
該傳感器在實際使用過程中,被測桿的偏轉方向自由變化,且被測桿可能出現傾斜的狀況。被測桿傾斜狀態可視作被測桿部分偏心,因而本文提出的四螺旋電極電容式棒位測量傳感器,首先以平行偏心計算結果進行函數擬合,并得到C1、C2與X的函數關系式,再驗證被測桿向不同方向偏轉及發生傾斜時該函數關系式的適用性。計算工況如下,依據圖1中所示的平面坐標系,增設z軸并設定z軸與陶瓷管軸線平行,在被測桿運動過程中,設定其尾部始終沿x=0 mm,y=-0.4 mm并與z軸平行的軸線運動,其端部分別沿x=0 mm,y=0.8、0.6、0.4、0.2、-0.6、-0.8 mm并與z軸平行的軸線,與x=0.2、0.4、0.6、0.8 mm,y=-0.4 mm并與z軸平行的軸線運動,分析當被測桿傾斜并沿不同偏轉方向偏心時式(14)的適用性。在分析過程中,以15 mm為步進單位,依照3.1節中所述計算方法,計算各工況的C1、C2,代入式(14),并求取N,理論模型計算結果如圖8所示。

圖8 被測桿傾斜工況的誤差分析Fig.8 Error analysis of measuring rod with incline condition
由圖8可知,當被測桿發生傾斜且偏轉方向發生變化后,N與X依然近似呈周期性變化規律,最大誤差為-3.11 mm,滿足棒位測量不失步的最大允許誤差限值。
3.3 結構優化
進行結構優化的目的在于,通過改變電極張角,合理分配1號電極對與2號電極對的靈敏度,增強傳感器的抗干擾能力。由上述分析可知,提升1號電極對(窄電極)的靈敏度,同時保證2號電極對與1號電極對的靈敏度有適當差別,是進行優化設計的主要目標。固定H=210 mm,分析電極張角對傳感器靈敏度的影響。設定如下兩種計算工況:α=50°、β=110°;α=70°、β=90°,分別為工況1和工況2,理論模型計算結果列于表3。

表3 傳感器優化結果Table 3 Sensor optimization result
由表3可知,對于四螺旋電極電容式棒位測量傳感器,電極間的靈敏度與電極張角正相關。對于工況2所示的傳感器結構,1號電極對與2號電極對的靈敏度均大于0.006 pF/mm,結合2.2節中的傳感器靜態特性實驗,可知在傳感器靜態特性實驗過程中,棒位測量樣機能對兩個電極對的靈敏度分別進行有效測量。以電極張角為優化對象,對1號電極對與2號電極的靈敏度與電極張角的關系進行分析,結果表明可通過合理分配電極張角,增強傳感器的抗干擾能力。
4 結論
本文提出了能實現偏心-步進電容變化量分離的電容檢測方法,為實現該方法提出了四螺旋電極電容式棒位測量傳感器的設計方案。針對該傳感器,完成了靜態特性實驗,建立了理論模型并完成了模型驗證。利用該模型系統分析了傳感器靜態測量誤差,完成了傳感器的結構優化。通過上述工作,主要得到了以下結論。
1) 針對帶懸空電極的電容式棒位測量傳感器,被測桿上、下行的靈敏度實驗結果分別為0.003 263 pF/mm和0.003 255 pF/mm,相對誤差為0.25%,實驗結果復現性良好。理論模型計算得到的傳感器靈敏度為0.003 508 pF/mm,與上、下行實驗結果靈敏度的相對誤差分別為7.51%和7.77%,表明模型計算結果合理可靠。
2) 針對四螺旋電極電容式棒位測量傳感器,應用偏心-步進電容變化量分離的電容測量方法,假定被測桿平行偏心,建立了1號電極對、2號電極對電容與棒位的函數關系式,該函數關系式對被測桿平行偏心工況的最大測量誤差為-3.01 mm。分析了被測桿偏轉方向和傾斜時該函數關系式的適用性,結果表明在分析工況內,最大測量誤差為-3.11 mm,小于棒位測量不失步的最大誤差限值±7.5 mm。表明新型傳感器配合該測量方法,可實現被測桿軸向位置的高精度測量。
3) 測量誤差隨棒位近似呈周期性變化規律,電極張角與電極靈敏度正相關。以電極張角為優化對象,對1號電極對、2號電極的靈敏度與電極張角的關系進行分析。優化完成的傳感器,1號電極對與2號電極對的靈敏度分別為0.006 062 pF/mm和0.008 394 pF/mm,屬于棒位測量樣機可有效分辨的靈敏度范圍。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
