某型線加速度傳感器故障判定研究
2022-12-28 14:16:34沈曉兵
長沙航空職業技術學院學報 2022年4期
沈曉兵,王 勇,賈 乾,孫 亮,葉 宏,楊 進
(1.空軍預警學院雷達士官學校,湖北 武漢 430019;2.93110部隊,北京 100843)
線加速度傳感器是飛行器上的重要元件,在對某飛行器進行修理時,在故檢測試階段出現故障參數,對飛行器進行排查,憑經驗逐步縮小排查范圍、逐個換件[1],最終確定故障器件為線加速度傳感器。該線加速度傳感器為進口型器件,價格貴,參考資料少,缺乏測試指標,按照飛行器整體測試要求,判斷該傳感器故障的測試僅針對其在某個特定的輸入值(加速度值)下進行,這對于具有較寬線性區間的加速度計的測試是不全面的[2],有一定概率犯第二類錯誤[3](將故障傳感器判定為合格傳感器),因此需要對該傳感器進行更全面的測試,以確定飛行器測試時出現故障參數是傳感器故障導致的。為解決傳感器故障判定問題,首先對該傳感器進行解剖和結構研究,繪制內部結構圖并分析其工作原理。在此基礎上研究該傳感器的測試電路和測試方法,然后采集、分析傳感器的測試數據,根據該傳感器工作原理確定測試數據線性化方法,從而判定出故障的傳感器。
1 線加速度傳感器工作原理分析
1.1 傳感器引腳定義
線加速度傳感器如圖1所示,其在飛行器中的主要作用為測量飛行器沿三個坐標軸的線加速度,其測量的加速度方向已標于傳感器上。
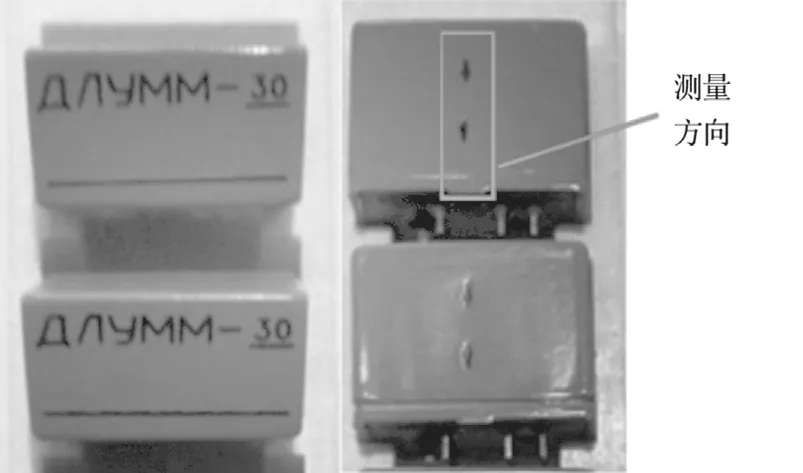
圖1 線加速度傳感器
其對外接口如圖2所示。
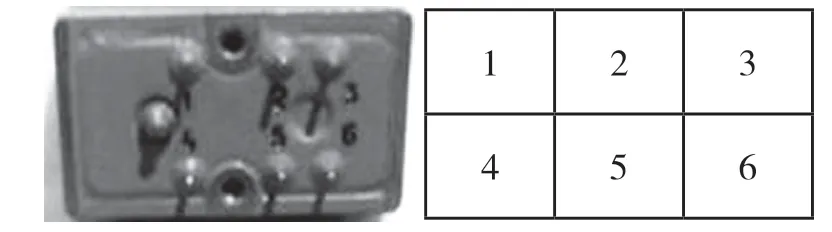
圖2 引腳標號
接口定義見表1。表1中已知3、4、5、6引腳的定義和作用,1、2雖然已知為測試輸入,但輸入的測試信號的形式未知。
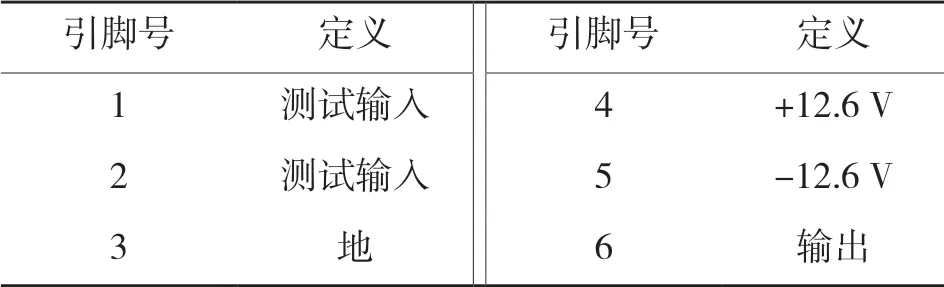
表1 引腳定義
1.2 傳感器結構解剖及分析
對故障傳感器進行分解,如圖3所示,傳感器由信號調理電路、感應傳感器、力矩傳感器線圈、永久磁鐵、慣性質量塊等組成。信號調理電路主要用于對傳感器從輸入量到輸出電信號的轉換、處理,輸出為適合傳輸、記錄或者能更好滿足后續標準設備或裝置要求的信號[4]。慣性質量塊感知其測量方向的線加速度,并轉換成與加速度相關的相對位移和力矩。感應傳感器用來測量并轉換因加速度引起的慣性質量塊和傳感器的相對位移。永久磁鐵和力矩傳感器線圈相互作用,平衡慣性質量塊和傳感器的相對運動。
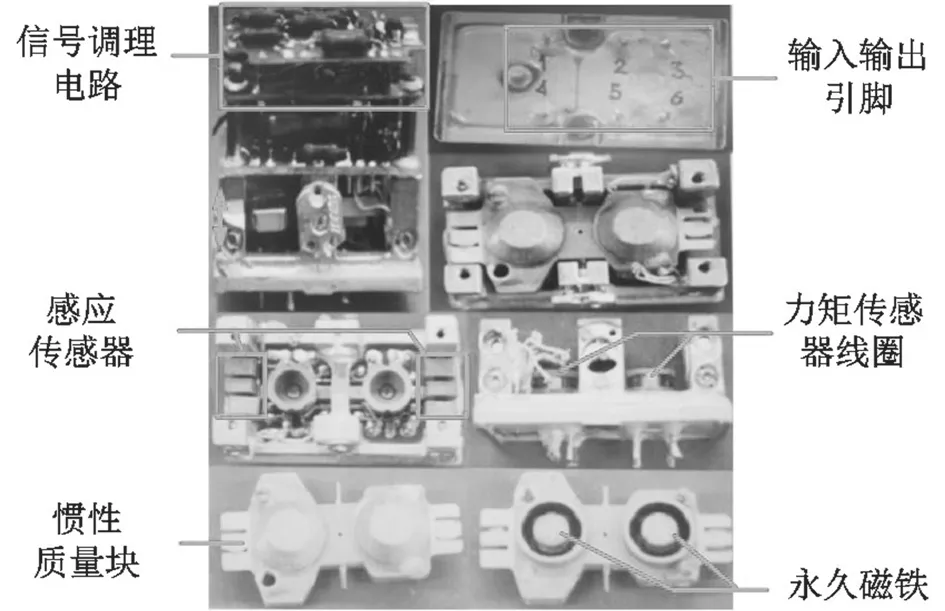
圖3 線加速度傳感器分解圖
根據圖3繪制傳感器的結構圖如圖4所示。各引腳的定義已在表1中給出。
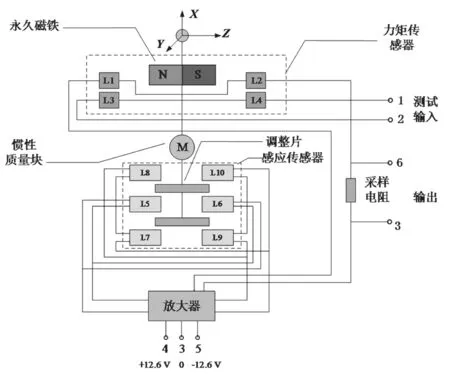
圖4 傳感器結構示意圖
假設飛行器沿Z軸做加速運動,加速度為a,則慣性質量塊M沿Z軸有一個相對位移,并產生沿Y軸的慣性力矩MY,慣性質量塊偏離原平衡位置。顯然MY與加速度a成正比,相對位移方向與加速度方向相反。這時:

式中KM為力矩MY相對加速度的傳遞系數。由于慣性質量塊的運動,感應傳感器L5—L10中產生感應電流,該電流輸出至放大器并轉換成直流電流,此電流與MY成正比。電流經采樣電阻兩端(3,6)輸出電壓U。

式中K0為輸出電壓U相對力矩MY的傳遞系數,K為輸出電壓U相對加速度a的傳遞系數。同時,該電流輸出至力矩傳感器,在線圈L1、L2中產生感應電流,感應電流的磁場與永久磁鐵產生的磁場相互作用,使永久磁鐵沿與慣性質量塊運動相反的方向運動,實現慣性質量塊的位移反饋,使慣性質量塊趨向于平衡位置。
2 線加速度傳感器測試
根據上文分析的線加速度傳感器的工作機理,選擇4個飛行器對其傳感器(編號aa、bb、cc、dd)進行測試(其中一個為線加速度傳感器有故障的飛行器),將飛行器固定于轉臺上,并連接電路,如圖5所示,利用重力模擬傳感器感知加速度,對加速度傳感器進行校準。在圖5用電壓表測量傳感器的輸出。隨著轉臺的轉動,電壓表測量的傳感器輸出也隨之變化,根據電壓表的測量電壓,可以采集到線加速度傳感器在過載為-g~+g時的對應輸出電壓。
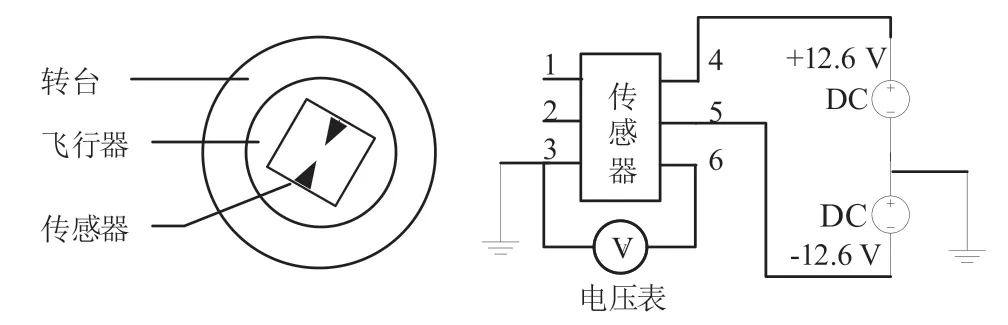
圖5 試驗電路
將飛行器在轉臺上按照刻度指示,從-165°旋轉至180°,每旋轉15°記錄傳感器的輸出電壓測量值,將測量值進行記錄,結果見表2。
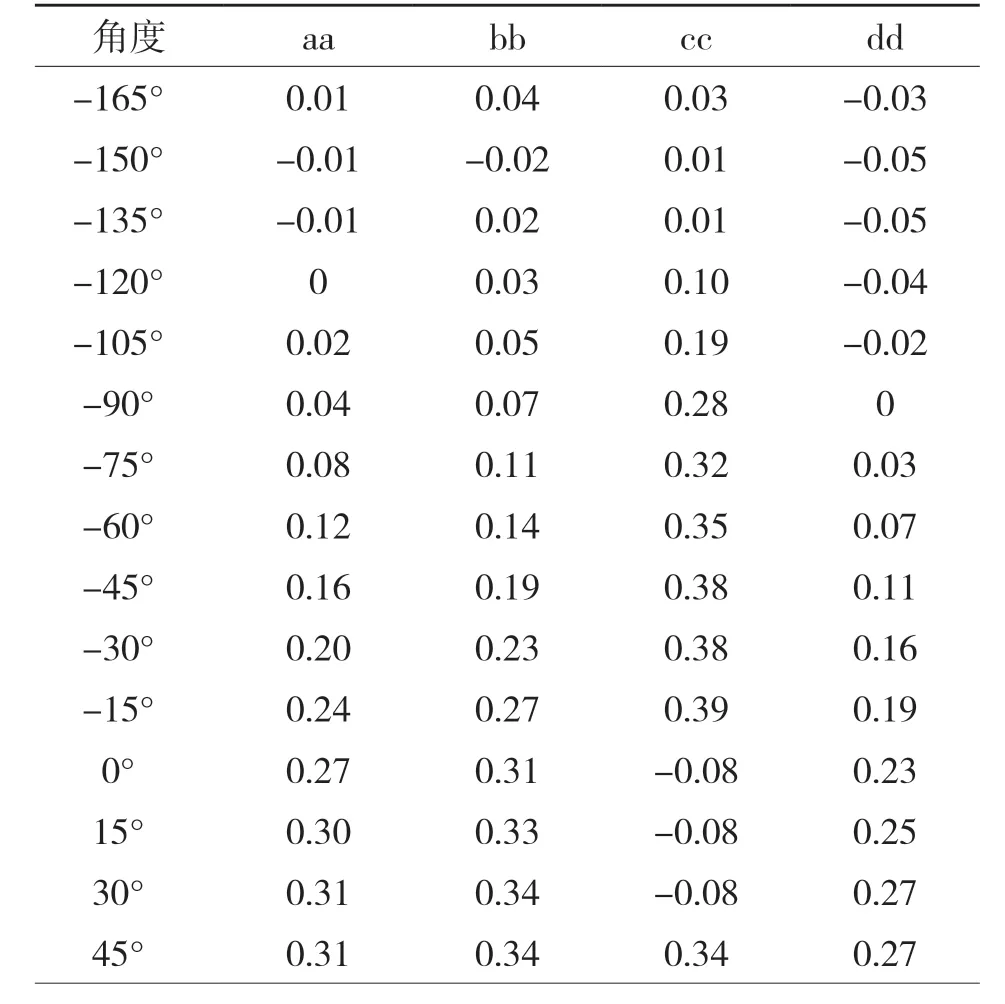
表2 試驗結果 單位:V
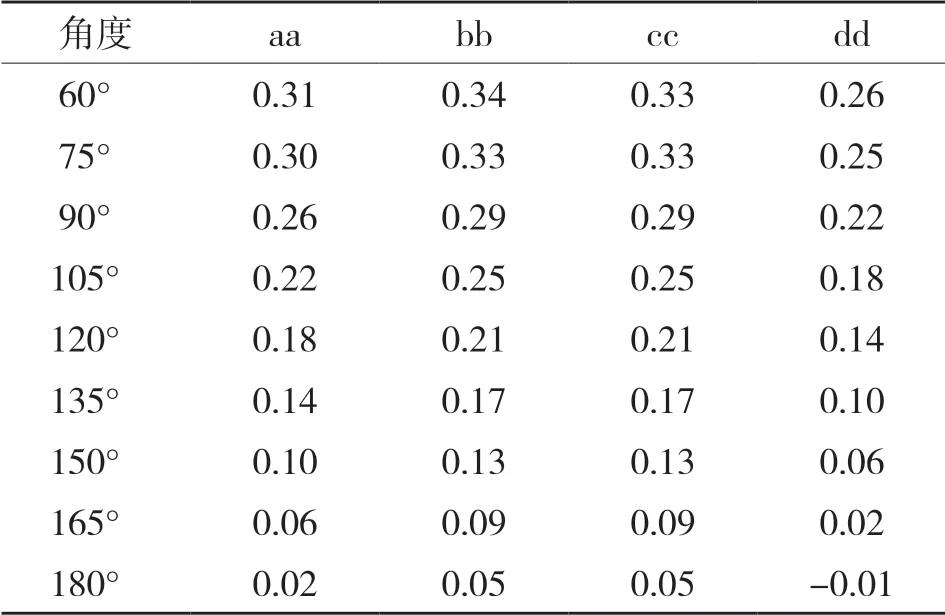
(續表)
3 測試數據分析
3.1 測試數據繪圖
在采集到傳感器測試數據后,因為沒有參考資料和測試依據可以證明傳感器測試結果的合格范圍,且測試結果從圖表中看比較雜亂,無法直接看出傳感器是否發生故障,只能對測試數據進行分析。對測試數據進行繪圖,繪制輸出電壓與輸入角度的關系曲線,X軸對應輸入角度θ,Y軸對應輸出電壓U。如圖6所示。
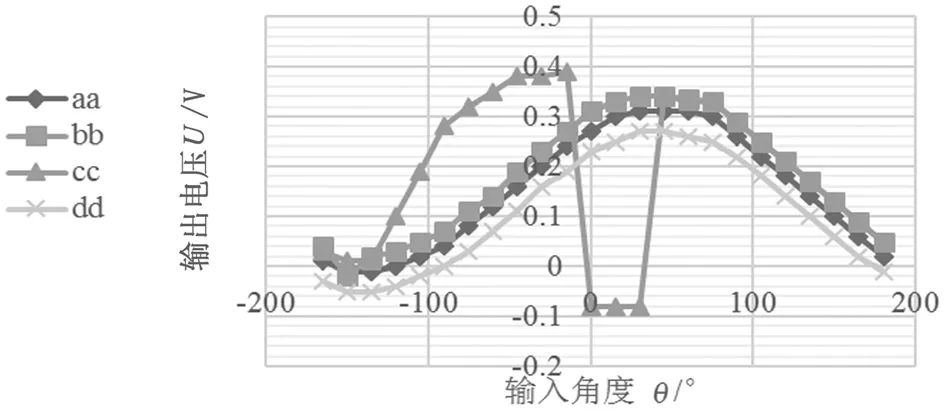
圖6 數據采集結果
從圖6中可以看出:
(1)傳感器aa、bb、dd隨輸入角度增加,輸出電壓先減小(輸入角度在-165°~-150°時)再增加至最大值(輸入角度在-150°~45°時),然后再開始減小(輸入角度在45°~180°時)。
(2)傳感器aa、bb、dd的特性曲線比較平滑,沒有出現數據大幅度跳躍的情況。
(3)傳感器cc的特性曲線相對其他3個傳感器出現了較大的數據跳躍,明顯異常。
(4)傳感器aa、bb、dd的特性曲線與余弦特性曲線近似。
3.2 基于線性化處理傳感器故障判定
根據圖6初步猜測編號為cc的傳感器發生故障(在對飛行器總體進行測試時,cc傳感器對應的飛行器確實發生了故障)。根據上述第4條,對于正常的傳感器,根據圖7假設輸出電壓U與輸入角度θ存在余弦關系,即:


圖7 線加速度傳感器測量示意圖
為了進一步對線加速度傳感器的測試數據進行定量分析,按照公式(3)對傳感器的輸出電壓與輸入角度進行線性化處理,并繪制曲線,如圖8所示。進行線性化處理后aa、bb、dd三個傳感器的輸入與輸出都呈線性關系,且可以計算出k的范圍為0.160~0.167,b的范圍為0.109~0.180,只有cc傳感器不是線性關系,表明cc傳感器出現故障。
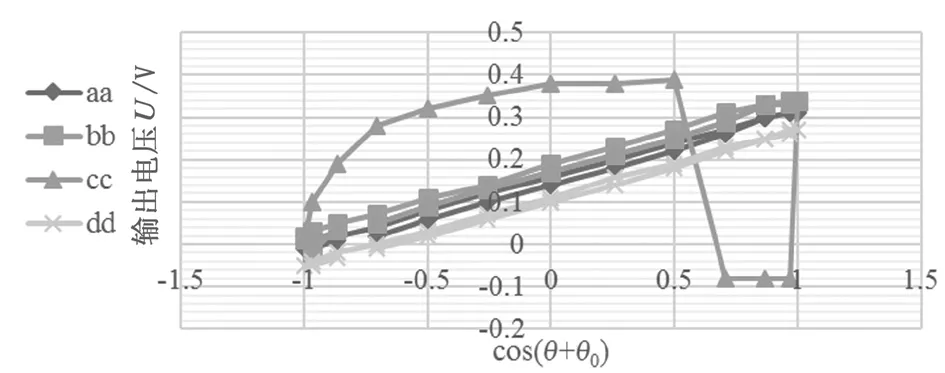
圖8 線性化處理
4 結束語
通過對某型線加速度傳感器進行測試,得到了在過載為-g~+g范圍內的輸出電壓與輸入加速度的關系。通過線性化處理,能夠直觀地判定并分離出故障的線加速度傳感器(編號為cc)。該方法可以將飛行器安裝在測試轉臺上直接實現(實際測試時飛行器也安裝在測試轉臺),無需外加復雜測試設備,方法簡單,可以作為一種排故手段。該方法的測試數據是通過在轉臺上旋轉飛行器獲得的,由于傳感器的測量范圍顯然超過-g~+g,后續將研究采用更豐富的測試手段對傳感器在-g~+g范圍外的加速度進行檢測,判斷傳感器是否出現故障。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
