自激振動旋耕刀設(shè)計與減扭降耗性能分析
2023-01-05 03:54:58肖茂華汪開鑫朱燁均周俊博馬如清
農(nóng)業(yè)機械學(xué)報 2022年11期
肖茂華 鈕 約 汪開鑫 朱燁均 周俊博 馬如清
(1.南京農(nóng)業(yè)大學(xué)工學(xué)院,南京 210031; 2.江蘇富捷刀業(yè)有限公司,鹽城 224700)
0 引言
土壤旋耕作業(yè)可打碎土層結(jié)構(gòu),疏松土壤表面,有利于減輕農(nóng)作物生長發(fā)芽的土壤阻力,為作物提供更多的空氣與光照條件[1-3]。但作業(yè)時土壤條件較差,導(dǎo)致傳統(tǒng)旋耕刀阻力大、功耗高[4-8]。方會敏等[9]通過離散元法(DEM)構(gòu)建出秸稈-土壤-旋耕刀相互作用的三維仿真試驗?zāi)P停玫搅诵蹲鳂I(yè)時的受力變化規(guī)律。劉妤等[10]基于離散元法和多體動力學(xué)(MBD)實現(xiàn)了刀輥耕作的仿真分析,并依托土槽試驗研究相同工況下刀軸扭矩變化情況,為旋耕刀的相關(guān)優(yōu)化提供了參考。
良好的機械振動可有效減小土壤阻力,提高減扭降耗效果,近年來機械振動理論被逐漸引入到農(nóng)耕機具中[11-13]。其中,基于自激振動理論的振動深松機構(gòu),由于可實現(xiàn)相同降阻條件下更低的功耗,受到國內(nèi)外專家學(xué)者的格外關(guān)注[14-15]。MA等[16]根據(jù)沿海地區(qū)高堿度和高濕度的特點,設(shè)計了自激振動式深松機,運用LS-DYNA顯式動力學(xué)分析軟件分別模擬了非振動和振動下的工作過程,分析研究了深松作用機理和土壤的應(yīng)力變化,以及土壤破碎對土壤振動的作用機理。周華等[17]基于滑切和自激振動減阻的原理,設(shè)計了滑切型自激振動深松裝置,減阻效果為15.45%~20.05%。RAZZAGHI等[18]選用了新的數(shù)學(xué)模型來分析一些關(guān)鍵設(shè)計參數(shù)對振動耕作農(nóng)具性能的影響,主要引入了無量綱術(shù)語以識別設(shè)計參數(shù)對工具性能的影響。而目前基于自激振動理論設(shè)計的旋耕刀研究相對較少。
功率為扭矩和轉(zhuǎn)速的乘積,轉(zhuǎn)速一定時,扭矩越小,功耗越小。為進一步減扭降耗,已有學(xué)者對振動式觸土農(nóng)機具的振動特性進行了研究[19]。張倩倩[20]對自激振動旋耕刀在土壤振動切削時的振動加速度信號進行頻譜分析,在一定程度上揭示了土壤振動減扭機理。現(xiàn)有文獻對自激振動旋耕刀所受阻力、扭矩和振動變化關(guān)系的相關(guān)研究較少。
本文擬在國標IT245旋耕刀上設(shè)計一種自激振動旋耕刀裝置,通過運動受力分析,對其大彈簧參數(shù)選型與彈簧心軸腰型孔進行設(shè)計。借助DEM-MBD耦合仿真,分析自激振動旋耕刀與國標旋耕刀在不同刀軸轉(zhuǎn)速下的三向阻力與扭矩變化情況,然后進行土槽試驗驗證仿真結(jié)果,最終通過對自激振動旋耕刀Y向振動信號的頻域分析,探究自激振動旋耕刀減扭降耗的變化規(guī)律。
1 自激振動旋耕刀裝置設(shè)計
1.1 自激振動旋耕刀結(jié)構(gòu)與原理分析
1.1.1整體結(jié)構(gòu)設(shè)計
基于多數(shù)學(xué)者在振動式耕作機械的研究成果以及結(jié)合現(xiàn)有國標IT245旋耕刀,采用SolidWorks三維軟件對自激振動旋耕刀裝置進行三維建模,整個裝置如圖1所示。

圖1 自激振動旋耕刀三維模型圖
自激振動旋耕刀主要是由彈簧心軸中的腰型孔與旋耕刀刀柄附加體進行配合,大彈簧一端與旋耕刀刀柄附加體接觸,另一端緊壓橡膠墊片使其與殼體接觸,彈簧心軸兩端與殼體采用調(diào)節(jié)螺母進行配合。通過對調(diào)節(jié)螺母A與B的調(diào)節(jié),實現(xiàn)彈簧心軸腰型孔與刀柄附加體之間軸向相對位置的變化。旋耕刀刀柄孔與孔軸采用間隙配合,小彈簧A、B與刀柄孔軸同心配合且分別位于旋耕刀刀柄與裝置外殼之間。旋耕作業(yè)時,在大彈簧、小彈簧A以及小彈簧B的作用下,旋耕刀實現(xiàn)繞軸小幅度轉(zhuǎn)動,實現(xiàn)自激振動,裝置殼體將整個自激振動旋耕刀進行固定封裝。
1.1.2工作原理
固定在刀輥上的自激振動旋耕刀作業(yè)時,圍繞刀輥做周期性轉(zhuǎn)動,伴隨著自激振動旋耕刀在土壤中所處位置的不同,其受阻力與扭矩也在不停變化[21]。為便于分析,將其主要作業(yè)狀態(tài)分為5部分,如圖2所示。為了便于比較不同狀態(tài)的刀具變化,將5種狀態(tài)的回轉(zhuǎn)半徑固定在一條指向作業(yè)前進方向的參考線上,圖中V為旋耕機工作時的前進速度(m/s);ω為旋耕機刀軸轉(zhuǎn)速(r/min);R為自激振動旋耕刀的回轉(zhuǎn)半徑(mm);φ為回轉(zhuǎn)半徑與前進方向參考線正向的夾角(刀具相位角,(°));α為刀柄附加體縱向與大彈簧軸向的夾角(°);H為最大耕深(mm)。當自激振動旋耕刀剛轉(zhuǎn)動還未與土壤發(fā)生接觸時,其扭矩與所受阻力近似為0,α1=90°,相位角為φ1,大彈簧處于自然狀態(tài)。伴隨旋耕刀轉(zhuǎn)動,側(cè)切刃先進入土壤中并處于縱向切土狀態(tài),隨著刀軸繼續(xù)轉(zhuǎn)動,其扭矩將繼續(xù)增大,切削阻力從旋耕刀傳遞到刀柄附加體,使大彈簧產(chǎn)生壓縮,α開始減小,α2<α1,相位角為φ2。當旋耕刀處于最大切土深度H時,扭矩將出現(xiàn)最大值,刀柄附加體與心軸腰型孔邊緣剛性接觸,從而阻止大彈簧進一步壓縮,α減小至最小值,α3=80°,此時,大彈簧受壓至極限位置,有助于減輕扭矩,降低阻力,相位角φ3=90°。當旋耕刀轉(zhuǎn)過最大耕深后,主、側(cè)切刃慢慢脫離與土壤切削狀態(tài),扭矩逐漸降低,此時大彈簧從壓縮狀態(tài)回彈到自然狀態(tài),α逐漸變大,α4>α3,相位角為φ4。最后,隨著旋耕刀繼續(xù)轉(zhuǎn)動,主切刃完全離開土層,扭矩逐漸減至0,α5=90°,相位角為φ5,旋耕刀在大彈簧作用下回復(fù)到初始位置。需要說明的是,耕作作業(yè)的任意時刻,旋耕刀遇到局部堅硬土壤或者石塊,根據(jù)自激振動原理,旋耕刀可產(chǎn)生相應(yīng)的偏轉(zhuǎn)和收縮以降低磨損、減小阻力和輸入扭矩,即也會壓縮大彈簧受壓甚至達極限位置,不限于至最大切土深度H一種情況。相位角作為旋耕作業(yè)重要的參數(shù),直接影響旋耕刀與土壤的接觸狀態(tài),導(dǎo)致其所受阻力與扭矩的不同,圖中φ取值范圍為26°~146°。

圖2 自激振動旋耕刀工作狀態(tài)
1.2 關(guān)鍵部件設(shè)計
1.2.1大彈簧參數(shù)設(shè)計選型
旋耕刀在土壤耕作時主要受到水平、垂直以及側(cè)向阻力,但是水平阻力是最主要的影響阻力,且隨著刀軸轉(zhuǎn)速的增加而上升[22]。垂直阻力通過旋耕刀施加力于土壤,其大小主要由耕深決定[21]。旋耕刀所受合力在側(cè)向的分解會得到一個力,這就是側(cè)向阻力。側(cè)向阻力隨著轉(zhuǎn)速的增加在一定范圍內(nèi)會產(chǎn)生波動,但是變化程度較平穩(wěn)。將受力位置選為正切刃,本文中定義自激振動旋耕刀三向阻力方向分別為:水平阻力方向為X向、垂直阻力方向為Y向、側(cè)向阻力方向為Z向。
自激振動旋耕刀在工作時受力分析如圖3所示。圖中Fx、Fy、Fz分別為旋耕刀受到土壤的水平阻力、垂直阻力與側(cè)向阻力(N);M為驅(qū)動力矩(N·m)。
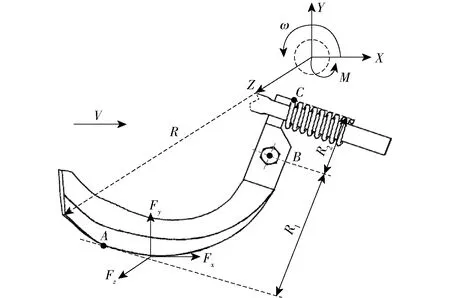
圖3 自激振動旋耕刀受力分析圖
大彈簧的相關(guān)參數(shù)是根據(jù)作業(yè)時旋耕刀所受載荷范圍來確定的,旋耕刀在工作中主要受水平阻力的影響,因缺乏不同轉(zhuǎn)速下旋耕刀所受合力分析的相關(guān)文獻,同時通過自激振動裝置原理可得,該裝置對水平阻力影響較小,因此本文綜合參考水平阻力與合力來確定耕作時旋耕刀所受載荷范圍。通過文獻[8-9,23]以及前期旋耕刀離散元仿真試驗可知,在耕作過程中土壤對旋耕刀主切刃與側(cè)切刃的阻力F的最大值范圍為200~300 N。圖3中點A為旋耕刀正切刃,點B為旋耕刀刀柄孔圓心,點C為旋耕刀刀柄附加體左下頂點,經(jīng)過計算得出R1與R2之比約為2.26,根據(jù)力學(xué)原理,得到大彈簧所受最大載荷F1計算公式為
(1)
式中R1——點A到點B的距離,mm
R2——點B到點C的距離,mm
F——旋耕刀所受阻力最大值,N
通過計算得出大彈簧所受最大載荷F1的范圍為452~678 N。在旋耕過程中大彈簧工作應(yīng)力必須在彈性極限范圍內(nèi),不能產(chǎn)生永久性變形。
通過前期仿真試驗、推導(dǎo)公式計算并依據(jù)相關(guān)國家標準[24],最終確定自激振動旋耕刀大彈簧的主要參數(shù)為:線徑4 mm、節(jié)距7.18 mm、自由長度 60 mm、有效圈數(shù)7.5、壓縮彈簧剛度42.1 N/mm、試驗最大載荷756 N。
1.2.2彈簧心軸設(shè)計
自激振動旋耕刀耕作過程中,應(yīng)該保證彈簧在受壓時不發(fā)生傾斜。隨著F1的變化,彈簧在心軸的約束下沿X向運動,起到了限制彈簧在Y向的運動。在耕作過程中通過杠桿原理將旋耕刀刀尖處的阻力傳遞到刀柄附加體處,再對壓縮彈簧進行壓縮,從而產(chǎn)生相應(yīng)的振動位移。由于刀柄附加體在圍繞刀柄孔運動過程中產(chǎn)生一定角θ,大彈簧此時受力為其所受阻力在X向上的分力,如圖4所示。由于壓縮彈簧剛度為42.1 N/mm,試驗最大載荷為756 N,而前文分析了大彈簧所受最大載荷F1的最大值為678 N,因此由圓柱螺旋壓縮彈簧剛度計算公式可得彈簧變形量[25],結(jié)合旋耕刀受力分析最終得出壓縮彈簧在耕作中最大變形量,計算式為

圖4 旋耕時彈簧載荷與心軸參數(shù)分析圖
F2=F1cosθ
(2)
(3)
式中F2——大彈簧在X向所受載荷,N
k1——大彈簧剛度,N/mm
λ——彈簧軸向變形量,mm
由式(3)可知,F(xiàn)2越大,壓縮大彈簧X方向變形量λ越大,由上文知F2在678 N時最大,通過計算得出λ最大值約為16 mm。考慮到自激振動旋耕過程刀柄附加體與心軸腰型孔兩端面會存在接觸碰撞現(xiàn)象,但為防止彈簧過度壓縮,腰型孔也要起到限制刀柄附加體轉(zhuǎn)動過大的作用,綜合考慮,本裝置心軸腰型孔設(shè)計總長度L為40 mm,起始狀態(tài)下,刀柄附加體端面到心軸腰型孔端面的距離L1為15 mm,如圖4所示。彈簧心軸主要與大彈簧進行配合,大彈簧的中徑設(shè)計為22 mm,為了保證耕作時大彈簧能在彈簧心軸上順暢滑動,彈簧心軸的直徑設(shè)計為 18 mm。
2 基于DEM-MBD耦合仿真試驗
由于自激振動旋耕刀作業(yè)時,土壤顆粒受旋耕刀作用力影響,需要采用離散元法進行分析;而仿真過程中彈簧要柔性化處理,需采用多體動力學(xué)理論進行分析;目前離散元仿真軟件和多體動力學(xué)仿真軟件均無法單獨完成上述仿真試驗,故采用DEM-MBD耦合仿真進行研究分析[26]。
2.1 多體動力學(xué)模型建立
利用RecurDyn軟件實現(xiàn)自激振動旋耕刀在作業(yè)時彈簧振動的動力學(xué)仿真。以自激振動旋耕刀作業(yè)單體為研究對象,通過三維建模軟件SolidWorks構(gòu)建臺車模型、旋耕機模型、三點懸掛模型,再將自激振動旋耕刀三維模型與上述模型進行組合裝配。
將裝配好的模型導(dǎo)入到RecurDyn中,需要對各部件添加合適的約束,添加的主要約束為:左地輪、右地輪、左拉桿、右拉桿和上拉桿分別與臺車添加固定副;刀輥和上拉桿分別與旋耕機添加固定副;自激振動旋耕刀與刀輥之間添加固定副。左地輪、右地輪與Ground之間添加Solid接觸副;左地輪、右地輪與刀輥以Ground為參考系添加旋轉(zhuǎn)副。在刀輥的旋轉(zhuǎn)副上添加驅(qū)動函數(shù),定義驅(qū)動類型為Velocity(time),考慮與EDEM耦合時,生成土壤顆粒期間旋耕機不工作,創(chuàng)建表達式為STEP(time,0,0,t,x1),含義為0~t內(nèi)速度為0,t后角速度為x1(rad/s),以實現(xiàn)刀輥的轉(zhuǎn)動。同理,在左地輪與右地輪的旋轉(zhuǎn)副上也添加驅(qū)動類型為Velocity(time)的驅(qū)動函數(shù),表達式為STEP(time,0,0,t,x2),用以實現(xiàn)簡化模型的前進運動。
仿真過程中需要考慮重力等因素的影響,需要設(shè)置對每個部件的材料屬性。在RecurDyn中對本三維模型中的各個零部件材料屬性進行設(shè)置。旋耕刀的材料類型為65 Mn鋼,彈性模量2.1×1011Pa,泊松比為0.3;臺車、拉桿、旋耕機、刀輥等材料類型選擇45鋼,彈性模量為2.05×1011Pa,泊松比為0.29;地輪材料為天然橡膠,彈性模量為1.0×106Pa,泊松比為0.45[27]。
自激振動旋耕刀耕作時,彈簧在土壤切削阻力的作用下產(chǎn)生彈性變形使旋耕刀產(chǎn)生自激振動。當出土后旋耕刀未受到力的作用,此時彈簧形變恢復(fù)。自激振動旋耕刀振動來源于彈簧的形變,因此需要將彈簧進行柔性化處理,最終建立自激振動旋耕機剛?cè)峄旌象w三維模型,如圖5所示。

圖5 自激振動旋耕機剛?cè)峄旌象w簡化模型
2.2 離散元模型建立
采用EDEM軟件進行離散元分析,為兼顧計算機分析時間與仿真效果,土壤顆粒直徑設(shè)置為 8 mm[28],采用網(wǎng)格法生產(chǎn)其模型,其密度ρ為 1 850 kg/m3,仿真土槽尺寸為2 400 mm×900 mm×300 mm,土壤顆粒總體數(shù)量為3.0×105個。
本次仿真采用Hertz-Mindlin with Bonding模型,此模型在粘結(jié)土壤破碎的過程中具有很好的應(yīng)用效果,它能在土壤顆粒中產(chǎn)生一定的約束,這種土壤間的約束能對土壤產(chǎn)生切向和法向的運動阻力,直到顆粒彼此間的力達到破壞約束作用時,土壤顆粒間才會產(chǎn)生作用。土壤的法向粘結(jié)力Fn、法向力矩Mn、切向粘結(jié)力Fτ和切向力矩Mτ計算式為
δFn=-υnSnAδt
(4)
δFτ=-υτSτAδt
(5)
δMn=-ωnSnJδt
(6)
(7)
其中
式中A——接觸區(qū)域面積,m2
Rb——粘結(jié)半徑,mm
J——截面極慣性矩,m4
Sn、Sτ——顆粒法向、切向粘結(jié)剛度,N/m3
υn、υτ——顆粒法向、切向速度,m/s
ωn、ωτ——顆粒法向、切向角速度,rad/s
δt——時間步長,s
模型中主要存在5個粘結(jié)參數(shù):顆粒法向粘結(jié)剛度Sn、切向粘結(jié)剛度Sτ;粘結(jié)顆粒法向臨界應(yīng)力δmax、切向臨界應(yīng)力τmax以及顆粒粘結(jié)半徑Rb。在土壤顆粒半徑確定的情況下,通過材料的密度與土壤含水率可得出粘結(jié)半徑Rb[29]。其余4個粘結(jié)參數(shù)、各材料性能參數(shù)與接觸參數(shù)如表1所示。

表1 材料性能參數(shù)與接觸參數(shù)
2.3 DEM-MBD耦合仿真試驗
在RecurDyn中設(shè)置簡化模型的前進速度為0.5 m/s,用來模擬旋耕試驗的前進速度[30],調(diào)整刀輥高度設(shè)定耕深為100 mm,刀軸轉(zhuǎn)速分別為150、200、250、300、350 r/min。
旋耕機工作狀態(tài)分為正轉(zhuǎn)和反轉(zhuǎn),參考文獻[20],反轉(zhuǎn)作業(yè)時旋耕刀的切土過程是自下而上,在切削張力作用下,土壤強度相對比較低,會更易因破裂而失效,故仿真模型設(shè)置為反轉(zhuǎn)。
此外,還需將此三維模型中的自激振動旋耕刀換成國標IT245旋耕刀,重復(fù)上述步驟,作為仿真對比試驗。最后,將在RecurDyn中生成Wall文件的模型導(dǎo)入EDEM中,并啟動激活狀態(tài),實現(xiàn)兩款軟件之間的實時耦合仿真分析。
整個仿真時長設(shè)為3 s,共分為2部分:0~1 s內(nèi)通過顆粒工廠生成仿真所需的3.0×105個土壤顆粒;在1~3 s內(nèi)旋耕機前進速度設(shè)置為0.5 m/s,耕深設(shè)置成100 mm,刀軸轉(zhuǎn)速分別設(shè)置成上述5種,進行仿真分析。設(shè)置數(shù)據(jù)保存頻率為0.001 s,2種旋耕刀對比仿真試驗共進行10次,在最后的SOLUTION模塊中采集數(shù)據(jù),主要截取1~3 s阻力與扭矩數(shù)據(jù),進行分析并繪制相關(guān)變化曲線,耦合仿真模型如圖6所示。

圖6 耦合仿真模型
2.4 阻力結(jié)果分析
仿真試驗得到2種旋耕刀所受三向阻力的變化規(guī)律,其隨刀軸轉(zhuǎn)動角的變化曲線如圖7所示。

圖7 2種旋耕刀在5種刀軸轉(zhuǎn)速下三向阻力隨刀軸轉(zhuǎn)動角的變化曲線
在5種刀軸轉(zhuǎn)速下2種旋耕刀旋轉(zhuǎn)120°,其水平阻力Fx數(shù)值一直為負,因為刀軸旋轉(zhuǎn)方向與旋耕機前進方向相反,且實際受力方向與圖3中坐標系反向;垂直阻力Fy呈先正后負的變化規(guī)律,主要是旋耕刀在達到最大耕深H的過程中向下切土,刀片受到垂直向上的阻力,與圖3標注同向故為正值;當旋耕刀從最大耕深開始出土拋送土壤時,刀片受到垂直向下的力,為負值;側(cè)向阻力Fz恒為正值,因為刀具一直受到內(nèi)側(cè)面的土壤指向刀體的阻力,且方向與圖3標注同向。
自激振動旋耕刀作業(yè)時,其絕大部分振動發(fā)生在垂直土面的方向上,故重點分析垂直阻力的減阻情況。當?shù)遁S轉(zhuǎn)速為150 r/min時,自激振動旋耕刀垂直阻力較國標旋耕刀降低了1.69%,分別為65.33、66.45 N;當?shù)遁S轉(zhuǎn)速為200 r/min時,垂直阻力降低了5.39%,分別為73.91、78.12 N;當?shù)遁S轉(zhuǎn)速為250 r/min時,垂直阻力降低了6.96%,分別為78.75、85.71 N;當?shù)遁S轉(zhuǎn)速為300 r/min時,垂直阻力降低了10.41%,分別為83.16、92.82 N;當?shù)遁S轉(zhuǎn)速為350 r/min時,垂直阻力降低了3.76%,分別為99.48、103.37 N。
2.5 扭矩結(jié)果分析
扭矩變化曲線如圖8所示,結(jié)果表明,旋耕刀刀軸所受扭矩隨著轉(zhuǎn)速的增加而變大,即所需的功耗也會越多。旋耕刀在仿真過程中可分為4個階段:①在旋耕刀未進入土壤時所受扭矩為0,在刀軸轉(zhuǎn)動下,側(cè)切刃進入縱切狀態(tài),隨著入土深度增加,扭矩增大,接著主切刃進入橫切狀態(tài),在主、側(cè)切刃與土壤共同作用時,扭矩出現(xiàn)驟然增加。②當旋耕刀到達最大耕深時,扭矩達到最大值。③旋耕刀越過最大耕深后,主、側(cè)切刃逐漸退出土層,扭矩慢慢減小。④當主切刃完全退出土層時,在此過程中扭矩逐漸減小至0。

圖8 2種旋耕刀在5種刀軸轉(zhuǎn)速下所受扭矩變化曲線
不同刀軸轉(zhuǎn)速下,旋耕刀旋轉(zhuǎn)一周所需時間不同,當在低轉(zhuǎn)速下所需時間大于較高轉(zhuǎn)速時,而本仿真中刀軸轉(zhuǎn)速跨度較大,若都采用相同時間段的數(shù)據(jù),誤差較大。故將數(shù)據(jù)采集的時間段進行分類,當?shù)遁S轉(zhuǎn)速為150、200 r/min時,數(shù)據(jù)采集時間段為 1~1.14 s,采集間隔為0.02 s,共71個數(shù)據(jù)點。當轉(zhuǎn)速為250、300、350 r/min時,數(shù)據(jù)采集時間段為 1~1.07 s,采集間隔為0.01 s,共71個數(shù)據(jù)點。最終,通過DEM-MBD耦合仿真得到自激振動旋耕刀與國標旋耕刀的扭矩變化如圖8所示。
為進一步分析2種旋耕刀的扭矩規(guī)律,對仿真時刀軸扭矩從0到峰值,再到0整個過程中的扭矩取平均值得出平均扭矩,如表2所示。

表2 5種轉(zhuǎn)速下2種旋耕刀平均扭矩仿真值
當?shù)遁S轉(zhuǎn)速為150、200 r/min時,自激振動旋耕刀與國標旋耕刀平均扭矩數(shù)值相差無幾,說明在低轉(zhuǎn)速下自激振動旋耕刀的減扭效果不明顯;轉(zhuǎn)速達250、300 r/min時,自激振動旋耕刀的平均扭矩均小于國標旋耕刀,分別下降9.80%和19.63%;轉(zhuǎn)速達到350 r/min時,自激振動旋耕刀相較國標旋耕刀平均扭矩變化不大,下降6.43%。
3 土槽試驗
試驗系統(tǒng)主要由電機、土槽臺車、行走導(dǎo)軌、土槽、旋耕機、傳動系統(tǒng)、液壓系統(tǒng)、三點懸掛機構(gòu)、傳感器、數(shù)據(jù)采集系統(tǒng)以及計算機等組成。土槽尺寸(長×寬)為24 000 mm×3 000 mm。土槽臺車尺寸(長×寬×高)為2 500 mm×3 000 mm×2 000 mm,其結(jié)構(gòu)簡圖如圖9a所示。

圖9 土槽臺車結(jié)構(gòu)簡圖與現(xiàn)場實物圖
土槽臺車三點懸掛后安裝旋耕機,采用江蘇清淮機械有限公司生產(chǎn)的1GKN-125型旋耕機。此旋耕機工作幅度為1 250 mm。整機尺寸(長×寬×高)為920 mm×1 482 mm×1 052 mm,作業(yè)速度范圍為0.83~1.39 m/s,傳動形式為中間傳動,現(xiàn)場實物如圖9b所示。
3.1 土壤參數(shù)
土槽內(nèi)的土壤為黏土(淤泥、黏土和沙質(zhì)量分數(shù)分別為47%、42%和11%),取自南京市永寧鎮(zhèn)。土壤經(jīng)過調(diào)濕、夯實后,控制每次旋耕試驗時土壤參數(shù)保持一致,土壤平均含水率15%~18%,平均堅實度2.5×105~3.0×105Pa。
3.2 旋耕部分
本文所使用的自激振動旋耕刀裝置為本課題組獨立設(shè)計,自激振動旋耕刀實物如圖10所示。單個自激振動旋耕刀裝置外殼的尺寸(長×寬×高)為110 mm×100 mm×40 mm。

圖10 自激振動旋耕刀實物圖
3.3 傳感器部分
旋耕試驗主要涉及扭矩轉(zhuǎn)速傳感器和加速度傳感器。土槽臺車三點懸掛輸出功率主要由動力電機提供,在動力電機輸出軸上采用名科扭矩轉(zhuǎn)速傳感器,型號為MCK-H001,扭矩量程為1 000 N·m,轉(zhuǎn)速量程為6 000 r/min,精準度為-0.5%~0.5%,環(huán)境溫度為-20~60℃。
自激振動旋耕刀在耕作時振動數(shù)據(jù)的采集需要通過加速度傳感器,本試驗采用維特智能藍牙無線加速度傳感器,型號為WT901BLE5.0C,如圖11所示,尺寸為51.3 mm×36 mm×15 mm,量程為(-16~16)g,測量精度為0.01g,數(shù)據(jù)輸出頻率為0.1~200 Hz。

圖11 無線加速度傳感器安裝示意圖
3.4 試驗方法
單次試驗在旋耕機的刀輥上安裝2把旋耕刀,旋耕機采用反轉(zhuǎn)且刀軸轉(zhuǎn)速設(shè)定為150、200、250、300、350 r/min共5擋,前進速度恒為0.5 m/s,耕深保持100 mm,測量自激振動旋耕刀在試驗過程中刀軸所受的扭矩與旋耕刀所受Y向振動加速度。而后更換為國標旋耕刀重復(fù)上述試驗流程。
土槽總長度為24 m,臺車運行長度為18 m,試驗時土槽兩端各留出一定緩沖區(qū),中間10 m為數(shù)據(jù)采集區(qū)。每個作業(yè)工況進行3次重復(fù)試驗,取3次平均值作為每次工況的試驗結(jié)果。試驗現(xiàn)場如 圖12 所示。

圖12 土槽旋耕試驗
4 試驗結(jié)果分析
4.1 碎土率
為了對比2種旋耕刀不同轉(zhuǎn)速的碎土效果,在測試區(qū)內(nèi)隨機選擇測試點,以0.5 m×0.5 m的正方形木框在測試區(qū)內(nèi)隨機進行取土,用塑料袋封存并標記,在實驗室內(nèi)用標準篩網(wǎng)進行篩選,篩出土塊最長邊大于4 cm的土塊,并求出碎土率[31],計算式為
(8)
式中C——碎土率,%
M0——0.5 m×0.5 m面積內(nèi)全耕層所有土塊質(zhì)量,g
M1——0.5 m×0.5 m面積內(nèi)全耕層最長邊大于4 cm土塊質(zhì)量,g
每種轉(zhuǎn)速3組試驗結(jié)果取平均值后,碎土率數(shù)據(jù)如表3所示,當?shù)遁S轉(zhuǎn)速為150、200 r/min時,自激振動旋耕刀相較于國標旋耕刀碎土率較為接近,而轉(zhuǎn)速在250、300 r/min時,自激振動旋耕刀的碎土率明顯上升,且后者效果更好;轉(zhuǎn)速為350 r/min時,碎土率再度接近。

表3 土槽試驗碎土率
4.2 平均扭矩
將每種轉(zhuǎn)速的3組試驗結(jié)果取平均值,得到國標旋耕刀與自激振動旋耕刀的平均扭矩如表4所示。

表4 土槽試驗中2種旋耕刀所受平均扭矩
由表4可得,作業(yè)工況相同時,隨著刀軸轉(zhuǎn)速增加,平均扭矩逐漸增大的趨勢與旋耕刀實際扭矩變化情況一致。
刀軸轉(zhuǎn)速為150、200 r/min時,土槽試驗所得2種旋耕刀平均扭矩接近,說明低轉(zhuǎn)速的降扭效果不明顯;轉(zhuǎn)速為250、300 r/min時,自激振動旋耕刀平均扭矩均低于國標旋耕刀,降低率分別為12.91%和19.72%;當轉(zhuǎn)速為350 r/min時,平均扭矩降低率的降幅較小,只有2.43%。
由于土槽臺車中各個傳動部件間存在摩擦以及干擾扭矩,因此實際試驗時采集到的扭矩存在偏差,試驗值總是大于仿真值。理想狀態(tài)下,土槽臺車輸出扭矩等于所有旋耕刀所受扭矩總和。若將試驗中存在的干擾因素近似視為一組常量,故臺車采集模塊上的扭矩數(shù)據(jù)近似為刀輥上2把旋耕刀的扭矩之和。
如圖13所示,國標旋耕刀仿真與試驗平均扭矩變化曲線相關(guān)系數(shù)為0.997且最大相對誤差為16.3%,自激振動旋耕刀的曲線相關(guān)系數(shù)為0.998且最大相對誤差為17.4%,基本驗證了構(gòu)建的DEM-MBD耦合仿真模型的準確性,進一步驗證了仿真試驗與實際土槽試驗結(jié)果的一致性。

圖13 2種旋耕刀仿真與試驗平均扭矩變化趨勢
4.3 振動信號頻域分析
振動信號的頻域分析是指將復(fù)雜的信號分割成不同區(qū)域段的簡單信號,本文主要對自激振動旋耕刀的Y向振動信號進行功率譜密度分析[32]。
為了得到自激振動旋耕刀Y向的固有頻率,首先通過ANSYS Workbench對整個裝置結(jié)構(gòu)進行模態(tài)分析。引入三維模型、設(shè)置零部件材料、進行網(wǎng)格剖分后,對刀座添加固定約束,設(shè)置模態(tài)分析的階數(shù)為6階,在SOLUTION解算模塊中對應(yīng)每個階數(shù)添加總變形量。通過模態(tài)分析可得1~6階振型的固有頻率和最大變形量,如表5所示。

表5 裝置模態(tài)分析結(jié)果
為了驗證自激振動旋耕刀模態(tài)分析的準確性,將裝置固定后對Y向采用錘擊法得到其振動加速度信號,再采用快速傅里葉變換(Fast Fourier transform, FFT)得到其固有頻率為15.28 Hz,與模態(tài)分析時3階固有頻率15.43 Hz較為一致。
由于自激振動旋耕刀裝置在耕作時振動主要發(fā)生在刀刃垂直土面的方向(Y向),本文只針對Y向的振動加速度信號進行分析處理。將采集所得Y向的振動加速度時域信號通過Matlab進行數(shù)據(jù)處理,并通過五點三次平滑法進行平滑預(yù)處理,得到更為精確的時域信號圖,通過對5種刀軸轉(zhuǎn)速下自激振動旋耕刀Y向振動加速度信號的時域信號圖進行功率譜密度分析,可以得到其在各個頻率點的功率分布,從而得到能量幅值最大時的頻率與其對應(yīng)的刀軸轉(zhuǎn)速,5種刀軸轉(zhuǎn)速下功率譜密度如圖14所示(圖中g(shù)=9.8 m/s2,作為振動加速度單位)。

圖14 5種刀軸轉(zhuǎn)速下自激振動旋耕刀Y向振動加速度功率譜密度
當功率譜密度幅值較大時,其能量也較大,碎土性能好。圖14a、14b、14c表明,隨著刀軸轉(zhuǎn)速的增加,Y向功率譜密度幅值也在增大,而刀軸轉(zhuǎn)速較低時,激振頻率沒有達到裝置Y向的固有頻率,此時沒有發(fā)生共振,功率譜密度幅值較低。當轉(zhuǎn)速達到300 r/min,激振頻率達到裝置Y向的固有頻率附近時,發(fā)生共振,Y向功率譜密度幅值達到最大值,如圖14d所示。轉(zhuǎn)速達到350 r/min時,激振頻率遠離裝置Y向的固有頻率,此時Y向功率譜密度幅值有所降低,如圖14e所示。
4.4 扭矩與振動規(guī)律分析
通過對自激振動旋耕刀扭矩與Y向的振動規(guī)律進行分析,揭示自激振動旋耕刀減扭降耗的規(guī)律。
由振動信號頻域分析可知,在刀軸轉(zhuǎn)速為150~300 r/min時,自激振動旋耕刀Y向功率譜密度幅值最大值隨著轉(zhuǎn)速的上升而增加,但在350 r/min時有明顯降低趨勢,平均扭矩降低率與功率譜密度幅值最大值關(guān)系如圖15所示。

圖15 自激振動旋耕刀試驗平均扭矩降低率與Y向功率譜密度關(guān)系圖
由圖15可得,5種刀軸轉(zhuǎn)速下平均扭矩降低率與自激振動旋耕刀Y向功率譜密度幅值最大值呈正比關(guān)系。在刀軸轉(zhuǎn)速為150~300 r/min時,隨著轉(zhuǎn)速的增加,平均扭矩降低率與功率譜密度幅值最大值均上升,且呈正比關(guān)系;轉(zhuǎn)速為350 r/min時,平均扭矩降低率和Y向功率譜密度幅值最大值均有所下降。即在刀軸轉(zhuǎn)速為300 r/min時自激振動旋耕刀獲得最大能量,故其扭矩降低幅度最大,此時減扭降耗的效果最佳。
5 結(jié)論
(1)在國標IT245旋耕刀基礎(chǔ)上設(shè)計了一種自激振動旋耕刀裝置,對自激振動旋耕刀工作原理進行闡述;通過運動受力分析,對自激振動旋耕刀關(guān)鍵部件進行設(shè)計,包括大彈簧參數(shù)選型與彈簧心軸腰型孔的設(shè)計。
(2)采用DEM-MBD耦合仿真技術(shù),對2種旋耕刀在前進速度0.5 m/s、耕深100 mm下的作業(yè)過程進行了仿真研究。對垂直阻力與扭矩的仿真值進行分析后得出,刀軸轉(zhuǎn)速為150、200 r/min時,減阻降扭效果不明顯。250、300 r/min時,自激振動旋耕刀相比國標旋耕刀的減阻降扭效果較好,垂向阻力分別降低6.96%與10.41%,且平均扭矩降低率較大,分別為9.80%和19.63%,而達到350 r/min時,減阻降扭的效果下降。
(3)在相同工況下開展的土槽試驗,獲得了5種刀軸下2種旋耕刀扭矩變化的基本規(guī)律。對2種旋耕刀在5種刀軸轉(zhuǎn)速下的仿真與試驗的平均扭矩進行了分析,得出了國標旋耕刀與自激振動旋耕刀平均扭矩變化曲線的相關(guān)系數(shù),分別為0.997與0.998,基本驗證了DEM-MBD耦合仿真模型的準確性,進而驗證了仿真與土槽試驗的一致性。
(4)土槽試驗表明,隨著刀軸轉(zhuǎn)速的增加,Y向功率譜密度幅值總體呈上升趨勢,但刀軸轉(zhuǎn)速較低時,激振頻率沒有達到裝置Y向的固有頻率,此時沒有發(fā)生共振,功率譜密度幅值較低。轉(zhuǎn)速達到300 r/min時,激振頻率達到裝置Y向的固有頻率附近,此時發(fā)生共振,Y向功率譜密度幅值達到最大值。當轉(zhuǎn)速為350 r/min時,激振頻率遠離固有頻率,此時Y向功率譜密度幅值有所降低。
(5)土槽試驗表明,當?shù)遁S轉(zhuǎn)速150~300 r/min時,隨著刀軸轉(zhuǎn)速的增加,平均扭矩降低率與Y向功率譜密度幅值最大值均上升,呈正比關(guān)系;當?shù)遁S轉(zhuǎn)速350 r/min時,平均扭矩降低率和Y向功率譜密度幅值最大值均有所下降。綜上,當?shù)遁S轉(zhuǎn)速為300 r/min時自激振動旋耕刀獲得最大能量,故其扭矩降低的幅度最大,減扭降耗的效果最優(yōu)。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
電子制作(2018年18期)2018-11-14 01:48:24
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
計算物理(2014年2期)2014-03-11 17:01:44
