深施型液肥對靶點施裝置設計與試驗
2023-01-05 03:55:18王金武劉子銘孫小博周文琪
農業機械學報 2022年11期
關鍵詞:作業
王金武 劉子銘 孫小博 唐 漢 王 奇 周文琪
(東北農業大學工程學院,哈爾濱 150030)
0 引言
液肥深施技術,即使用相關機具,將液肥施用到作物根部附近的施肥技術。液肥深施技術具有直達作物根系、提高作物產量、減少液肥揮發對農田環境造成的污染,促進根系向下生長等優點[1],符合我國農業綠色可持續發展戰略。
國外對液肥深施機具研究起步較早。RAHMAN等[2]研制了圓盤探針式液肥深施機,在施肥圓盤上均布施肥針,施肥針隨施肥圓盤滾動依次入土施肥;WOMAC等[3]設計了一種曲柄滑塊驅動的液肥深施機,通過曲柄周期性轉動,帶動注肥針入土噴肥;DA SILVA等[4]研制了一種凸輪-曲柄搖桿驅動式液肥深施裝置,采用凸輪控制噴肥針在豎直方向上往復運動和入土噴肥。國內液肥深施技術研究進展較為迅速。趙桂虎[5]研制了舵輪式液態肥深施機,施肥圓盤上均布噴肥針,在拖拉機牽引下,施肥圓盤滾動,噴肥針依次入土施肥;楊自棟等[6]研制了2FDY-02型輪盤式液肥深施機,由拖拉機驅動液肥泵將液肥壓入施肥輪,施肥輪上均布導流開穴器,當導流開穴器插入土壤后噴肥口開啟,液肥沿導流開穴器射入土壤;東北農業大學王金武團隊多年來從事液肥深施機的研究[7-9],研制了1YJ-140深施型液肥穴施肥機、SYJ-2深施型液肥穴施肥機和SYJ-3深施型液肥穴施肥機,其分別采用曲柄搖桿機構、全橢圓齒輪行星輪系和非規則行星齒輪系驅動噴肥針實現入土噴肥、出土停噴,均具有較優的作業效果。在上述研究中,所研制的液肥穴深施機具均通過機械結構實現了液肥定點深施,節約了肥料,減少了液肥揮發,但以上機具在作業過程中,無法確保液肥精準深施于作物植株附近。
綜上所述,針對現有液肥穴深施機具施肥位置不準確等問題,結合機械結構設計和自動控制技術,設計一種深施型液肥對靶點施裝置。設計關鍵部件液肥深施開溝器,應用EDEM軟件驗證開溝器結構的可行性。使用光電傳感器和電磁閥協同作用設計液肥對靶點施系統。通過田間試驗驗證裝置的作業性能。
1 整體結構與工作原理
1.1 整體結構
深施型液肥對靶點施裝置主要由機架總成、三點懸掛架、減速器、輸肥系統、液肥深施開溝器、噴肥針、開溝器安裝架、連接桿對靶點施控制系統和地輪總成組成,其中輸肥系統包括液肥泵、過濾器、液肥箱、溢流閥和輸肥管路,對靶點施控制系統由控制盒、光電傳感器和電磁閥等組成。深施型液肥對靶點施裝置整體結構如圖1所示。

圖1 深施型液肥對靶點施裝置結構簡圖
1.2 工作原理
深施型液肥對靶點施裝置通過三點懸掛架與牽引拖拉機掛接,拖拉機動力輸出軸驅動減速器,減速器輸出端的主動帶輪帶動液肥泵工作,液肥泵從液肥箱中吸取液肥,將液肥輸送至電磁閥口。裝置由拖拉機牽引作業,液肥深施開溝器再以設定的入土深度開出肥溝,對靶點施控制系統的測速模塊實時監測裝置前進速度,光電傳感器檢測植株位置,當前進方向上植株遮擋光電傳感器,控制盒結合裝置當前速度控制電磁閥開啟,液肥經由噴肥針噴出,完成液肥對靶點施。
2 關鍵部件設計及參數確定
2.1 液肥深施開溝器結構與性能要求
(1)液肥深施開溝器結構
液肥深施開溝器是裝置的關鍵部件,應在確保開溝深度的前提下具有較好回土性能,因此,液肥深施開溝器結構如圖2所示,其由滑切刃、擾土面、擠土面、導向斜面和整形面組成。

圖2 開溝器整體結構圖
(2)液肥深施開溝器性能要求
開溝器作業時完全入土,土壤受擾土面擾動發生向上抬升和側向拋擲,如圖3所示。CDE和C1D1E1為側拋土壤形成的溝壟截面,GG1H1H為向上抬升土壤截面,EE1I為肥溝橫截面。根據開溝器結構特點,液肥深施開溝器將肥溝分為兩部分,分別是區域EE1F1F和區域F1FI,區域EE1F1F土壤受擾土面抬升側拋后沿導向斜面回落,區域F1FI土壤受擠土面和整形面擠壓形成肥溝。
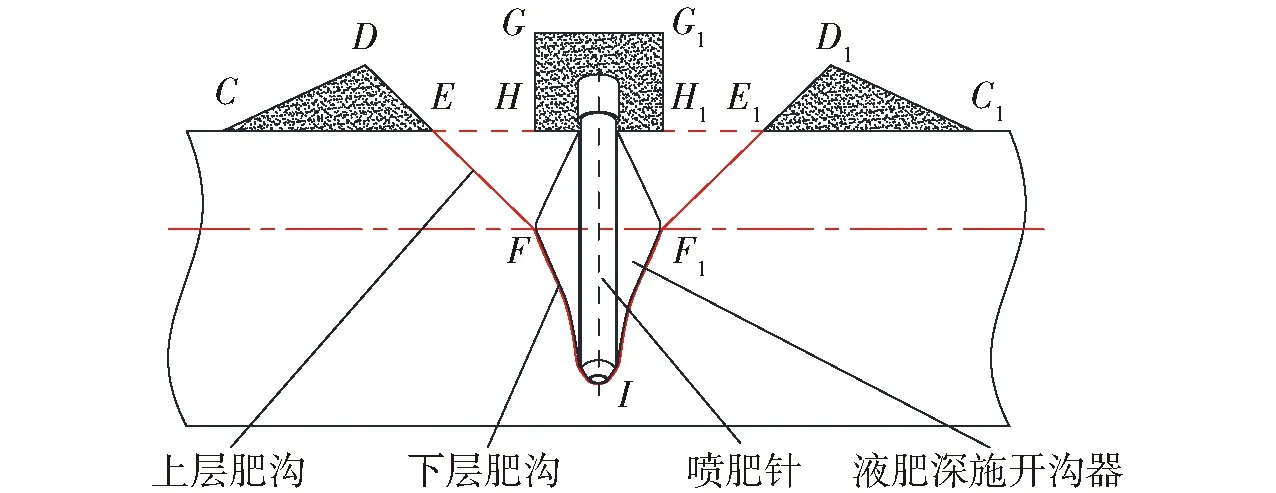
圖3 土壤擾動示意圖
開溝器作業過程中土壤體積守恒,故土壤橫截面面積守恒[10],回土前橫截面土壤滿足
SEE1F1F=SCDE+SC1D1E1+SGG1H1H
(1)
式中SEE1F1F——上層溝形輪廓截面面積,mm2
SCDE、SC1D1E1——溝壟截面面積,mm2
SGG1H1H——向上抬升區域土壤截面面積,mm2
土壤回流如圖4所示,抬升土壤經導向斜面滑落,回填肥溝。側拋土壤按照土壤自然堆積角堆積[11],部分土壤流回肥溝。綜合圖3和圖4可知,土壤回流后,回填區域土壤滿足
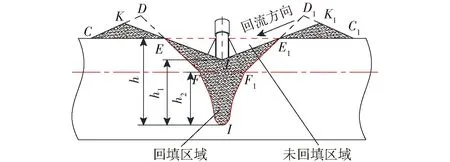
圖4 土壤回流示意圖
SEJE1I=SKDE+SK1D1E1+SGG1H1H
(2)
式中SEJE1I——回填區域土壤截面面積,mm2
SKDE、SK1D1E1——回流土壤截面面積,mm2
液肥深施開溝器應具有一定的回土能力,根據上述分析可知,開溝器作業時,回落的土壤主要為受擾土面擾動的土壤,即區域EE1F1F內土壤,被填充的區域主要為區域F1FI,但填充的土壤難以量化,而該區域的深度h2是定值,因此選用圖4中回土深度h1作為衡量開溝器回土性能的指標,若回土深度h1大于區域F1FI深度h2,則認為液肥深施開溝器達到設計要求。
2.2 滑切曲線設計
為便于控制滑切刃形狀,選擇拋物線作為滑切曲線。對拋物線建立直角坐標系,如圖5所示。取拋物線上兩點A(x1,y1)、B(x2,y2),兩點滑切角分別為θ1、θ2,yAB為開溝器整體高度。取點A為滑切曲線起始點,點B為滑切曲線終點。則θ1為起始滑切角,θ2為終止滑切角。設滑切曲線AB方程為

圖5 滑切曲線
y=ax2
(3)
式中a——滑切曲線系數
AB斜率為
(4)
AB高度差即滑切刃部分高度
yAB=yA-yB
(5)
聯立可得拋物曲線AB方程為
(6)
由式(6)可知,滑切曲線由θ1、θ2和yAB決定。根據液肥深施農藝要求,選擇yAB=80 mm。根據滑切原理,滑切角θ應大于土壤摩擦角φ。東北地區黑壤土摩擦角為23°[12],故取起始滑切角θ1=25°。而文獻[13-14]表明滑切角在35°~55°范圍內滑切效果較好,因此選定終止滑切角θ2=45°,確定滑切曲線方程為y=0.014 3x2。
2.3 擾土面與導向斜面設計
設計開溝器擾土面結構如圖6所示。

圖6 擾土面結構簡圖
擾土面的開度、高度等參數難以確定,但由于在此開溝器尾部需要鑲嵌噴肥針,而現有噴肥針尺寸多為10~20 mm[15-17],因此暫取開溝器開度20 mm。而擾土面高度、擾土面夾角和開溝器開度幾何關系為
(7)
式中α——擾土面水平夾角,(°)
β——擾土面豎直夾角,(°)
lOL——擾土面上點L與原點O間距離,mm
hOM——擾土面高度,mm
lON——擾土面長度,mm
開溝器擾土面與豎直平面夾角應大于土壤摩擦角,因此當開溝器開度取20 mm時,根據所取土壤摩擦角數值和式(7)可得擾土面高度為21 mm。而根據回土原理分析,開溝時,肥溝被分為上層肥溝和下層肥溝兩部分,即區域EE1F1F和區域FF1I,如 圖7 所示。
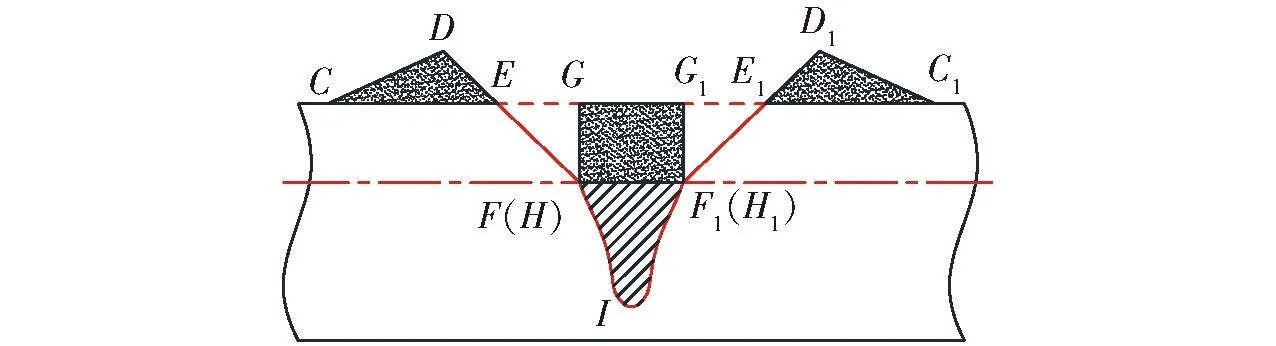
圖7 受擾動土壤示意圖
由回土原理分析和圖7可知,土壤回落主要依靠向上抬升區域GG1H1H,假設區域GG1H1H的土壤完全回落填充下層肥溝區域FF1I,則SGG1H1H和SFF1I應滿足
SGG1H1H≥SFF1I
(8)
式中SFF1I——下層肥溝截面面積,mm2
區域EE1F1F可視為矩形區域,區域FF1I可近似視為三角形區域。綜合前期所取的開度和擾土面高度數值,可知若開度固定,擾土面高度取21 mm時,SGG1H1H
導向斜面的作用是引導土壤落回溝內,實現回落土壤覆埋肥料的目的。導向斜面結構如圖8a所示。
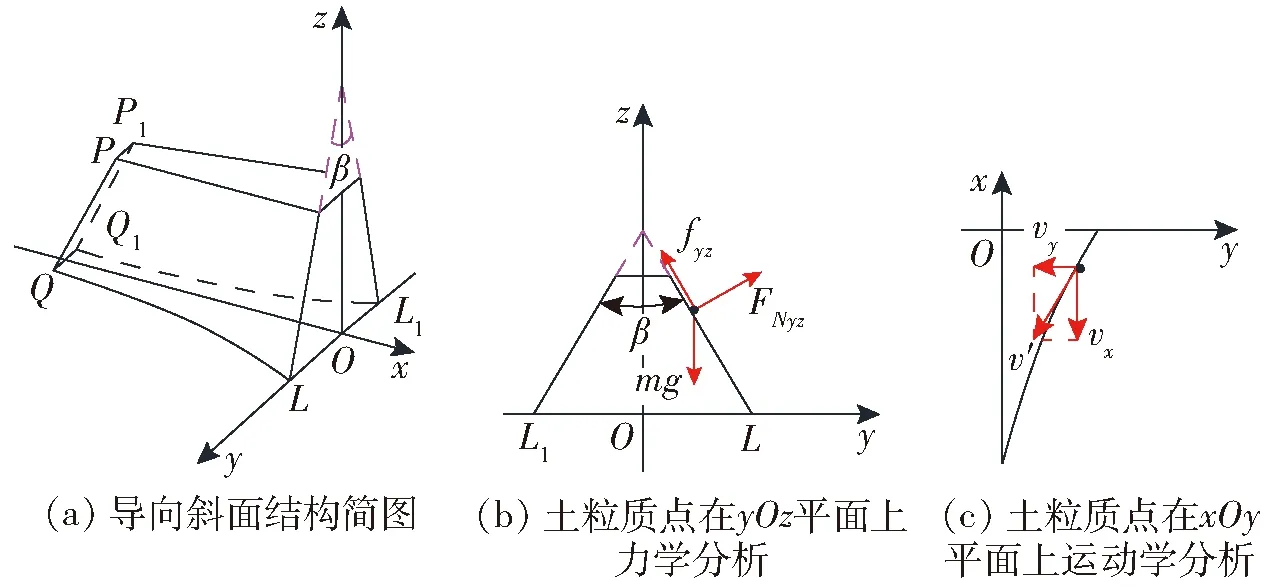
圖8 開溝器導向斜面示意圖
對其上單一土粒質點進行運動學分析,如圖8b,土粒在yOz平面內沿斜面下滑,對其進行動力學分析,有
(9)
(10)
式中m——土壤顆粒質量,kg
fyz——土粒在xOz面所受阻力,N
ayz——土粒沿斜面下滑加速度,m/s2
FNyz——土粒沿斜面下滑所受支持力,N
μ——斜面與土壤顆粒間摩擦因數,取0.5
將式(10)代入式(9),整理得
(11)
根據已確定的開溝器結構參數以及土壤顆粒摩擦因數[18],可知式(11)中μsin(β/2)項極小,因此計算時可忽略摩擦力fyz,整理式(11)得
(12)
根據圖8b中幾何關系,對土粒質點列運動學方程得
(13)
綜合式(12)、(13)可得土粒質點滑落到斜面底端時間為
(14)
土粒質點在xOy面上運動如圖8c所示,其速度可分解為沿y軸負方向和沿x軸負方向的速度分量,沿x軸負方向的速度分量與開溝器前進速度大小相等方向相反,因此土粒在導向斜面上沿x軸負方向為勻速直線運動,其位移公式為
x=vxt
(15)
將式(14)代入式(15),可得土粒質點位移x(即導向斜面長度)
(16)
根據式(16)可知,導向斜面長度與開溝器前進速度、開度有關。設開溝器以速度v=1.0 m/s作業時,對開溝器導向斜面進行計算得導向斜面長度 42 mm,為保證傳感器與噴肥針間安裝距離,取導向斜面長80 mm。土粒離開導向斜面作平拋運動,如圖9所示。x′1為尾部傾斜一定角度時的平拋位移,x′2為尾部豎直時平拋位移[19]。
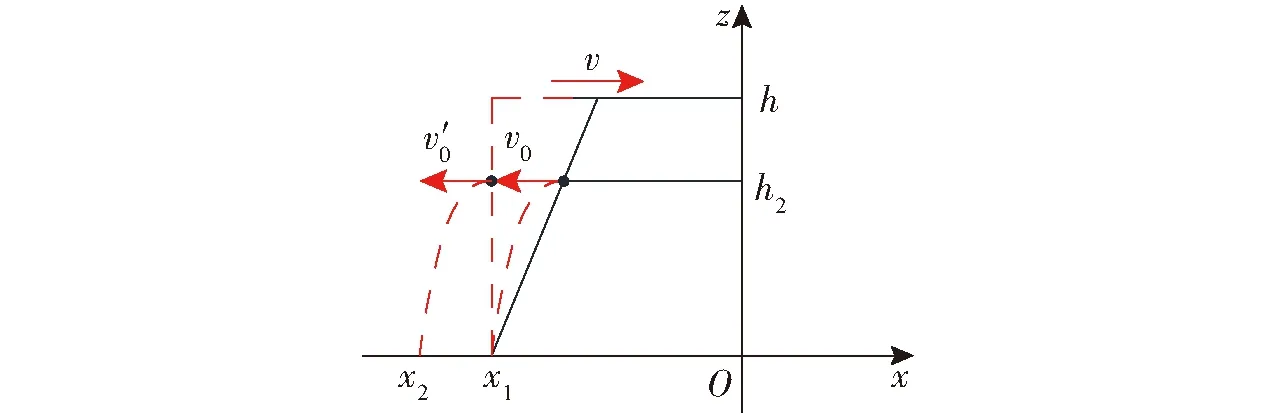
圖9 土粒質點平拋運動軌跡
根據圖9可知,開溝器尾部斜置一定角度,可使土壤沿導向斜面滑落后直接覆埋肥料。平拋運動水平位移公式為
(17)
計算得x′1=14 mm。由圖9幾何關系得開溝器尾部傾角
(18)
計算得η=75°。
2.4 擠土面與整形面設計
擠土面與整形面結構尺寸已由擾土面和導向斜面結構參數確定,因此僅對其進行力學分析。開溝器作業時,擠土面推壓土壤開啟溝壑,再由整形面擠壓溝壁,形成肥溝。
擠土面上土粒質點空間受力如圖10所示,其空間受力關系為
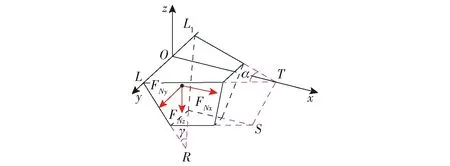
圖10 擠土面空間受力示意圖
(19)
根據式(19)可得,開溝器作業時,擠土面對土壤產生推壓力,從而形成肥溝。
整形面主要對肥溝及溝壁進行整形[20],對其上單一土粒質點進行力學分析,如圖11所示。

圖11 整形面土粒質點動力學分析
土粒質點沿x、y、z軸方向動力學方程為
(20)
式中Nx——土粒受壓力x方向上分力,N
Ny——土粒受壓力y方向上分力,N
Nz——土粒受壓力z方向上分力,N
fxy——土粒在xOy平面內摩擦力,N
f′xy——fxy在yOz平面上的分力,N
f″yz——f′yz在xOy平面上的分力,N
ψ——整形面與y方向夾角,(°)
δ——土粒運動方向與x軸夾角,(°)
ax——土粒在x方向上加速度,m/s2
ay——土粒在y方向上加速度,m/s2
az——土粒在z方向上加速度,m/s2
將式(20)整理為
(21)
由式(21)可知,角δ增大,ay和az增大,整形面對土壤水平和豎直方向壓力FNy和FNz增大,可有效擠壓溝壁達到整形目的。
3 虛擬仿真
3.1 虛擬仿真模型建立
(1)虛擬仿真接觸模型確定
東北地區土壤是含水率較高的黏重黑土,土壤與觸土部件間的黏附力較大,為使虛擬土壤貼近實際土壤條件,保證虛擬仿真的準確性,選用Hertz-Mindlin JKR Cohesion接觸模型[21],該模型是一種凝聚力接觸模型,適用于模擬泥土等顆粒間易發生粘結和團聚的含濕物料。
(2)虛擬土壤模型建立
為使虛擬土壤貼近真實土壤條件,設置虛擬土壤顆粒半徑為2 mm[22-23]。虛擬土壤分層建立,每層20 mm,深度0~100 mm土壤為作業層,此深度內土壤顆粒隨機生成,100~140 mm為緩沖層,用于隔離作業層和虛擬土槽底部[24]。綜上所述,確定虛擬土壤尺寸為1500 mm×600 mm×140 mm,并分別設置準備區和數據收集區。虛擬土壤如圖12所示,虛擬土壤參數見表1。
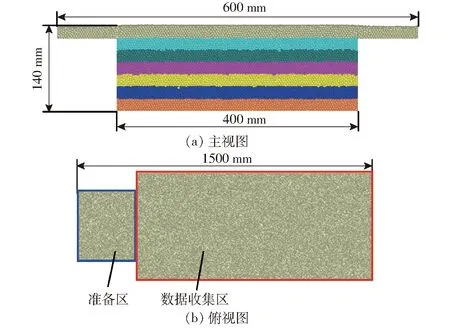
圖12 虛擬土壤模型

表1 離散元仿真參數
(3)整體模型建立
運用CREO 5.0軟件對開溝器進行三維建模(比例1∶1),并以.step文件格式導入EDEM中,設置開溝器材料為65Mn,密度7 861 kg/m3,泊松比0.29,剪切模量7.9×104MPa。整體模型如圖13所示。

圖13 離散元虛擬仿真模型
設置開溝器沿作業方向前進速度1.0 m/s,入土深度80 mm,總時間2.0 s,進行虛擬仿真。
3.2 開溝器結構可行性驗證
根據開溝器理論分析可知,對土壤回落起主要作用的是開溝器擾土面和導向斜面,故在仿真中主要分析上述結構。EDEM軟件后處理模塊中將顆粒轉換為位移矢量表示,可觀察土壤顆粒受擾動情況[25]。
擾土面對土壤擾動仿真結果如圖14所示。開溝器作業時,擾土面促使土壤向上抬升和側向拋擲。向上抬升的土壤隨著開溝器前進會直接回落于開溝器表面,并沿導向斜面滑落。開溝器剛入土時,與擾土面所接觸的土壤向側面拋撒,如圖15a所示,其中綠色箭頭表示發生側拋的土壤,土壤拋出后,在溝側堆積形成溝壟。隨著開溝器前進,側拋所形成的溝壟按照自然堆積角堆積,一部分土壤滑落回溝內,如圖15b所示,圖中箭頭方向表示側拋回落的土壤。

圖14 土壤擾動仿真結果

圖15 土壤側向拋擲仿真結果
受擾動的土壤回落時,首先落于開溝器表面,隨著開溝器前進,土壤沿導向斜面下滑,并最終落于噴肥針后方,如圖16所示。
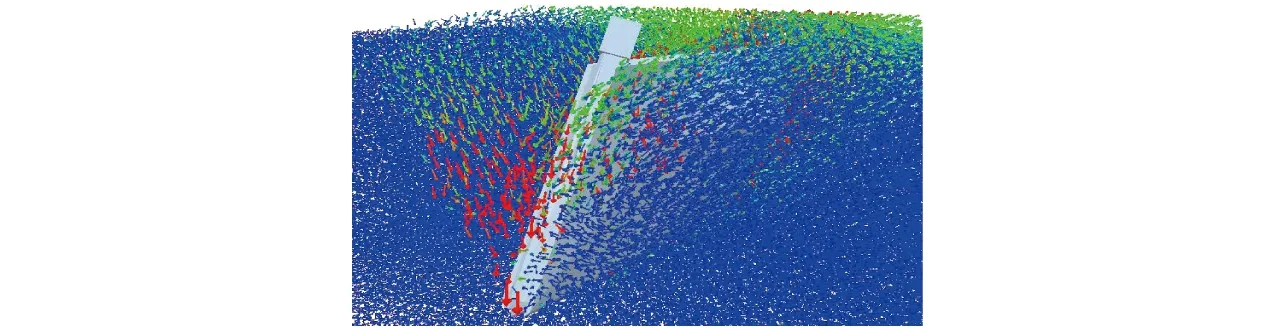
圖16 回落土壤流向圖
虛擬仿真獲取溝形輪廓如圖17所示。由圖17a可知,開溝器作業后,回落土壤為上層土壤。溝形輪廓虛擬仿真結果與開溝器對比如圖17b所示,開溝器回土深度h1高于開溝器整形面高度,整形面高度即下層肥溝深度h2,可知開溝器具有回土性能。

圖17 溝形輪廓虛擬仿真圖
綜合虛擬仿真過程和結果,可知理論分析與虛擬仿真較為一致,EDEM虛擬仿真驗證了液肥深施開溝器回土性能和其結構的可行性。
4 對靶點施控制系統設計
系統通過傳感器檢測植株莖稈,再由單片機根據裝置前進速度控制電磁閥啟閉,從而實現液肥對靶點施作業。系統硬件由光電傳感器、電磁閥、測速模塊和繼電器模塊等組成,液肥對靶點施控制系統硬件框圖如圖18所示。
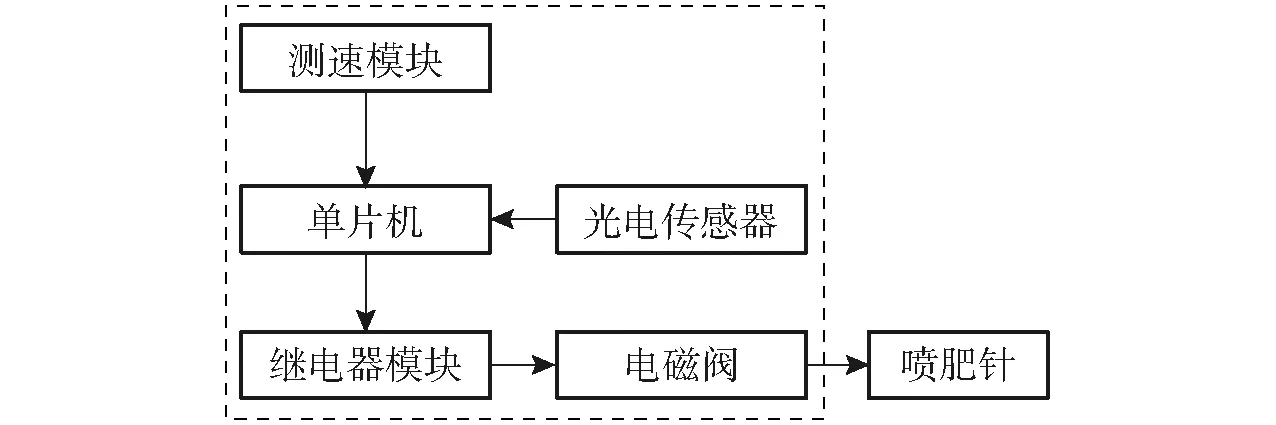
圖18 對靶點施控制系統硬件框圖
4.1 系統硬件
系統電路如圖19所示,微控制器采用STM32F103C8T6單片機,其工作頻率可達72 MHz,滿足系統設計需求;U1是電源轉換模塊,采用MK002184芯片,用以將作業機具蓄電池提供的 12 V 電源轉換為系統中各模塊需要的5 V或3.3 V電源;P1為光電傳感器,其信號輸出端通過分壓電路板與單片機PC13引腳相連,確保輸入單片機的電壓信號在規定范圍內;P2為電磁閥,微控制器在接收傳感器信號后,驅動5 V繼電器吸合,實現電磁閥開啟。
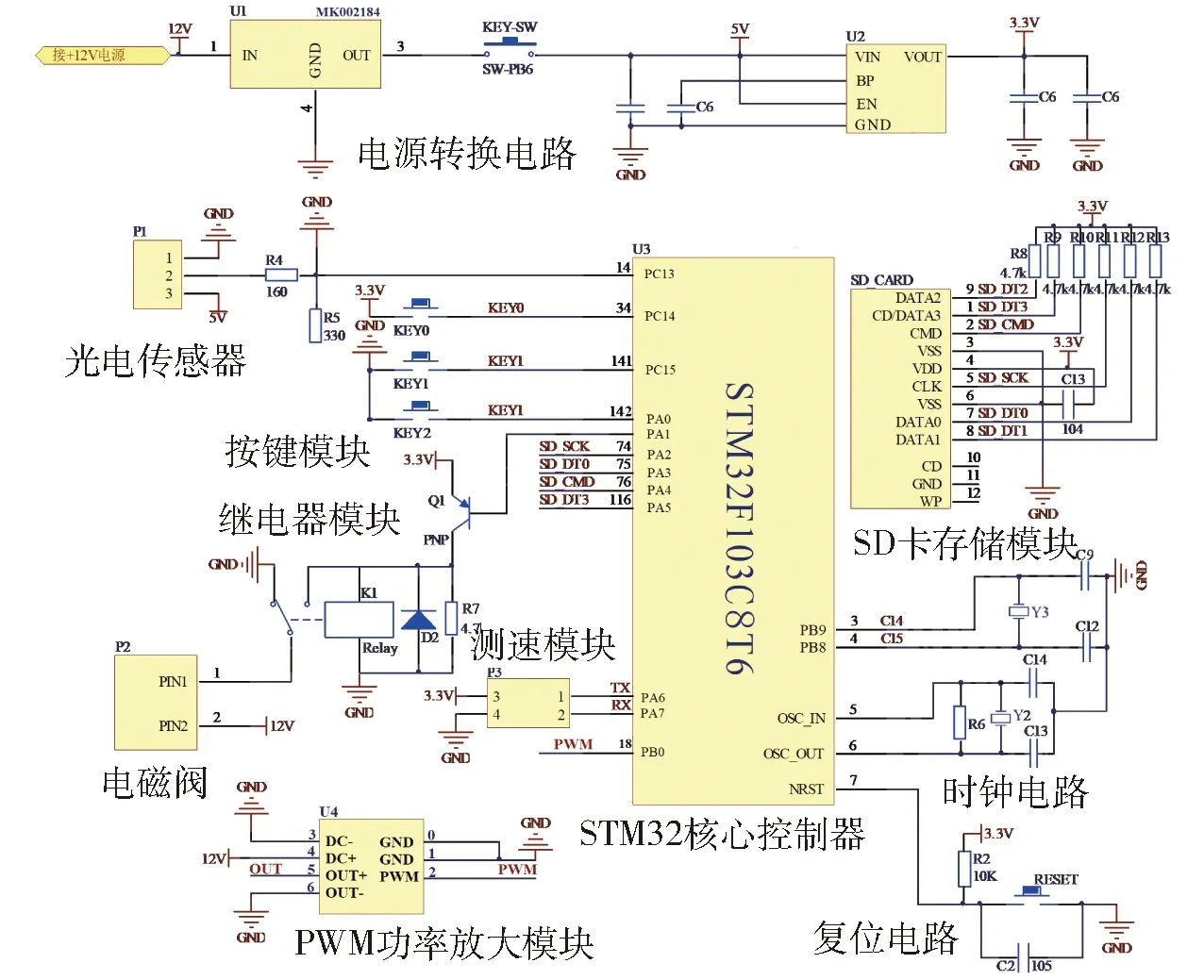
圖19 對靶點施控制系統電路
探測元件采用滬豐機床電器制造廠生產的 E18-D80NK 光電傳感器,其可發射640~650 nm紅色可見激光,工作電壓6~36 V DC,工作電流200 mA,響應時間2 ms;執行元件采用Kamoer流體科技公司生產的KVE21PS12N2N651A型常閉電磁閥,工作電壓12 V DC,響應時間25 ms,最大工作壓力0.8 MPa。對靶點施控制系統及電路板實物如圖20所示。

圖20 對靶點施控制系統實物圖及其電路板
4.2 系統程序
系統軟件程序工作流程如圖21所示。首先初始化系統I/O端口、定時器和寄存器。隨后系統開始工作,測速模塊監控作業速度,光電傳感器檢測植株位置。當傳感器檢測到植株后,單片機根據作業速度得出電磁閥開啟時機,繼電器吸合,電磁閥開啟,噴肥針噴肥,噴肥量由系統延時程序控制,在延時結束后,繼電器關斷,電磁閥閉合,噴肥針停噴,完成對靶施肥作業。
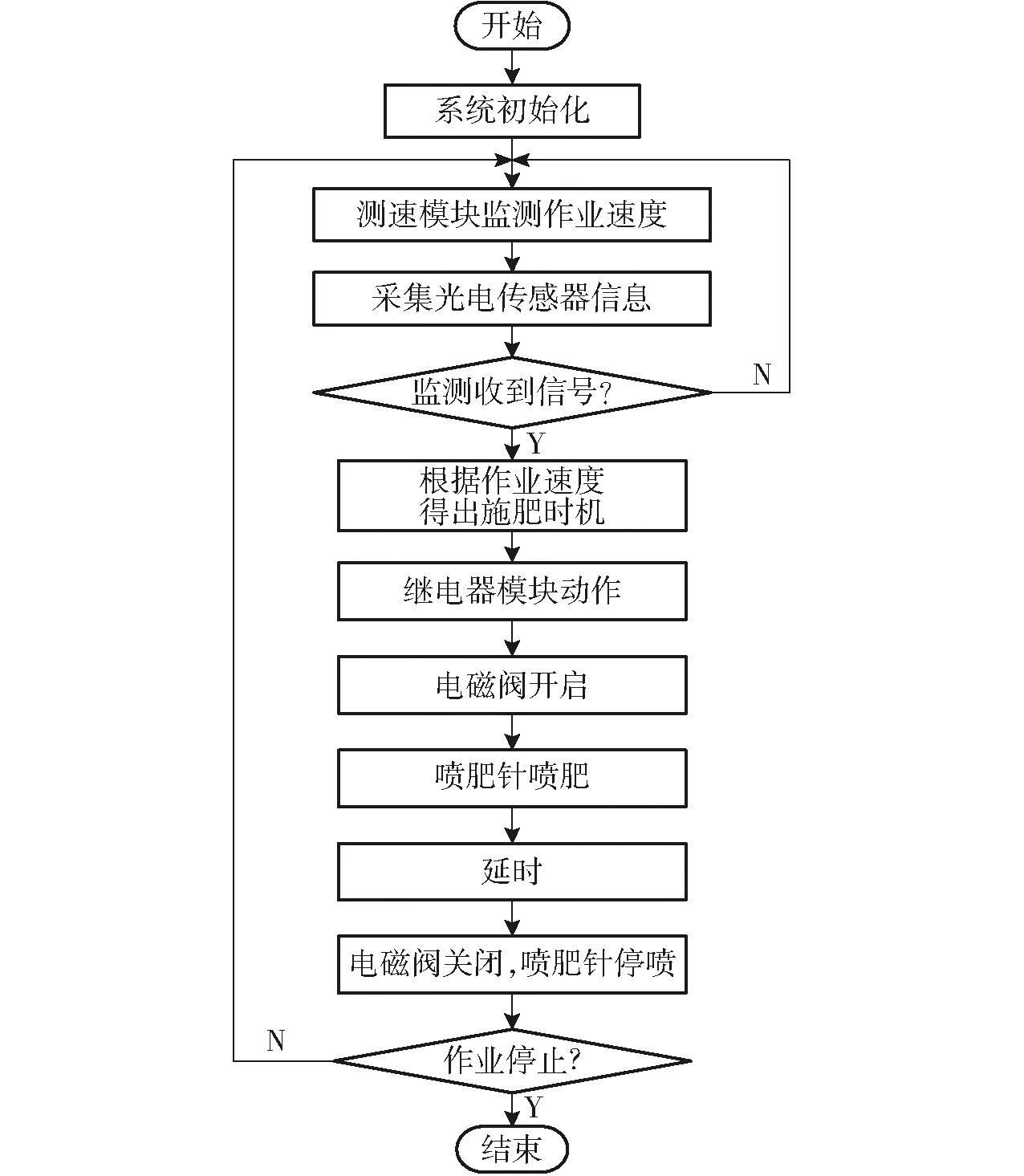
圖21 對靶點施控制系統工作流程圖
4.3 對靶點施運動過程分析
光電傳感器檢測植株位置,測速模塊監測行進速度,隨后控制盒控制電磁閥開啟,執行施肥動作。如圖22所示,光電傳感器與噴肥針間有一定安裝距離,當傳感器首次檢測到植株時即位置Ⅰ,由于微控制器、繼電器模塊和電磁閥需要一定的響應時間,且噴肥針距離植株較遠,因此位置Ⅰ時電磁閥不動作,噴肥針不施肥。當裝置到達位置Ⅱ時,微控制器、繼電器模塊和電磁閥達到響應時間且滿足液肥施用農藝要求時,繼電器模塊吸合,電磁閥開啟,噴肥針施肥,達到一定施肥量后,電磁閥關閉,完成一次對靶施肥動作。裝置繼續行進,在位置Ⅲ時,傳感器未檢測到植株,電磁閥不開啟,噴肥針不施肥,直至檢測到下一植株。
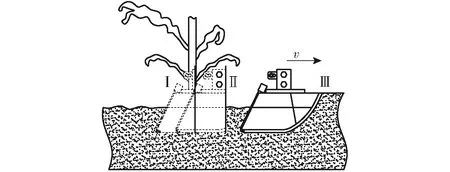
圖22 施肥過程示意圖
根據對靶點施系統運動過程分析可知,裝置施肥時機與行進速度、傳感器安裝位置、控制系統響應時間有關。傳感器安裝位置與裝置噴肥位置關系圖如圖23所示。
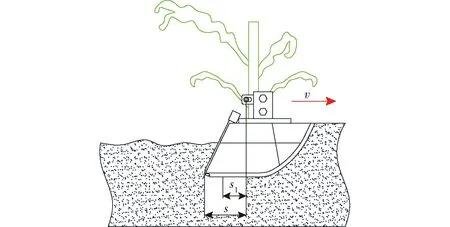
圖23 施肥位置與傳感器安裝位置關系圖
在實際作業過程中對靶點施系統根據機具行進速度變化實時調整電磁閥開啟時機,從而避免電磁閥開啟時間過早或過晚,造成液肥誤施或漏施。因此根據施肥作業要求和所選傳感器、繼電器模塊及電磁閥響應時間,傳感器安裝距離和機具前進速度之間應滿足
(22)
其中
t1=t2+t3+t4
(23)
式中t1——噴肥動作總時間,s
t2——傳感器響應時間,s
t3——繼電器模塊響應時間,s
t4——電磁閥響應時間,s
s1——噴肥起始點與植株間距,mm
s——安裝間距,mm
根據式(22)、(23),結合液肥深施“側5深8”農藝要求[26],取s1=50 mm,傳感器安裝架固接于開溝器連接桿上,取安裝間距s=80 mm,傳感器響應時間t2=2 ms,繼電器響應時間t3=2 ms,電磁閥響應時間t4=25 ms,可得裝置前進速度不大于1.0 m/s。
施肥位置與裝置行進速度關系如圖24所示。根據上述系統的響應時間、傳感器安裝距離和機具前進速度之間關系可知,在行進速度較為合適時,傳感器檢測植株后,噴肥針運動到施肥位置再進行施肥,如圖24a所示;在速度較低時,傳感器檢測到植株和系統響應時間結束后,噴肥針還未到達指定施肥位置,如圖24b所示,此時會造成施肥提前,即裝置誤施;在行進速度較快時,傳感器檢測植株后,系統未達到指定響應時間,噴肥針已離開施肥位置,如圖24c所示,即裝置漏施。
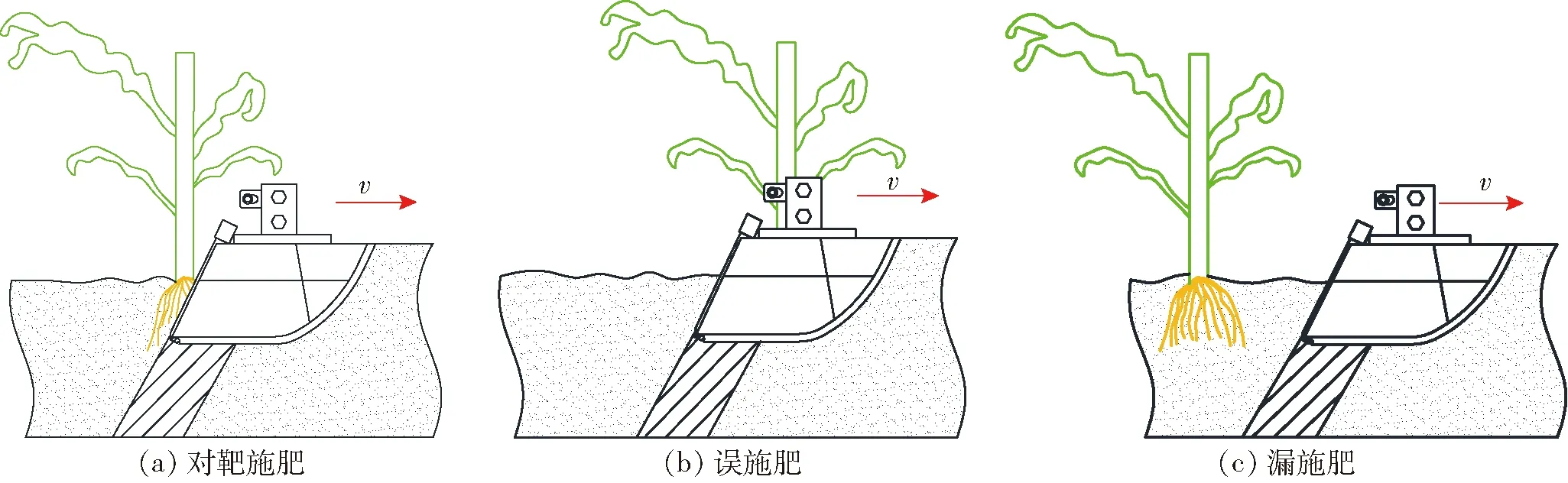
圖24 施肥位置與行進速度關系示意圖
5 田間試驗
5.1 試驗方法
為驗證深施型液肥對靶點施裝置在田間的作業性能,于2021年7月1—8日,在東北農業大學阿城試驗田進行田間試驗。試驗期間平均氣溫28~32℃,無降雨。試驗田為玉米植株,平均行距 650 mm,平均高度270 mm,平均株距330 mm。試驗時,以20 m作為一個試驗區長度,設置試驗區前后各5 m區域作為緩沖區用于裝置啟停緩沖。統計方法為在試驗區內沿裝置前進方向選取4個測試小區,測試小區為0.4 m(玉米種植壟寬)×2 m,每個測試小區間隔0.5 m。裝置由拖拉機牽引。試驗前,調整拖拉機三點懸掛控制裝置作業深度80 mm。試驗時控制拖拉機前進速度為0.4、0.6、0.8、1.0 m/s。以回土率和對靶率為試驗指標,田間試驗現場如圖25所示。

圖25 田間試驗現場
5.2 田間試驗評價指標
(1)回土深度
回土深度反映裝置作業后回落土壤對液肥覆埋情況。田間溝形輪廓如圖26所示。

圖26 田間溝形輪廓圖
提取圖26中田間溝形輪廓,如圖27所示,分別取回土最低點A和溝底最低點B,hAB即為田間回土深度。

圖27 田間溝形輪廓提取圖
回土深度統計方法為在每個測試小區內隨機選取3處位置測量回土深度并取平均值,即該測試小區回土深度。每個試驗區內測試小區回土深度取平均值,即試驗區回土深度。根據液肥深施開溝器性能要求,定義若hAB高于開溝器整形面高度h1,稱裝置回土性能滿足設計要求。
(2)對靶率
對靶率表征裝置的對靶施肥性能,判定方法依據液肥深施農藝要求“側5深8”,以玉米植株為圓心,半徑50 mm作圓,在此區域內施肥均為對靶施肥;超出此區域則為誤施或漏施,對靶施肥判定方法如圖28所示。
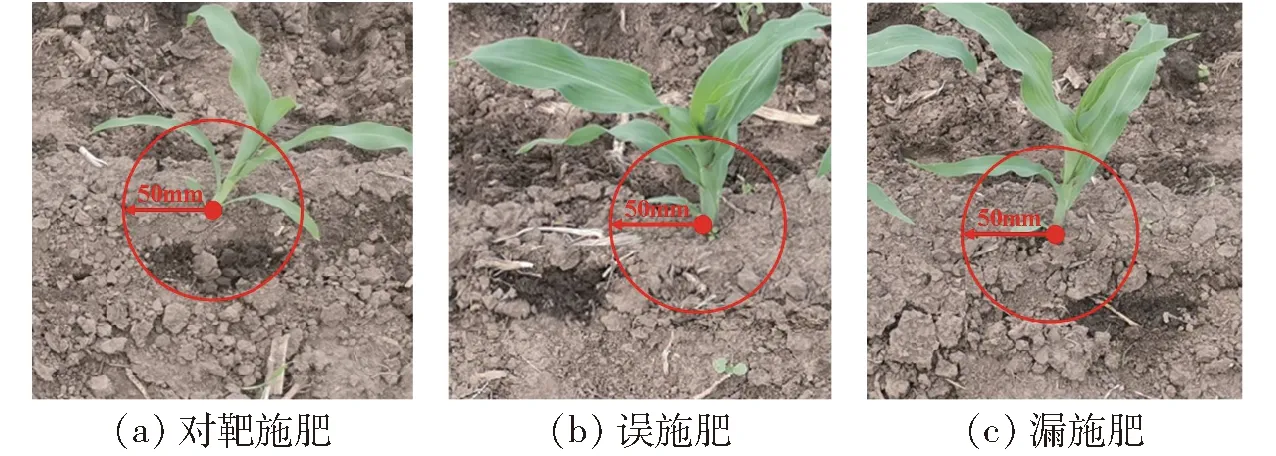
圖28 對靶施肥判定方法
對靶率統計方法為在每個測試小區內分別統計對靶施肥的植株,用對靶施肥植株數除以測試小區內總植株數,即為每一測試小區內對靶率。在同一速度下,分別計算試驗區內4個測試小區對靶率并取平均值,即為此試驗區的對靶率。
5.3 田間試驗結果與分析
記錄作業前后每個測試小區內回土深度和對靶率,每組水平試驗重復3次,測試結果取平均值作為試驗結果。田間試驗結果見表2。
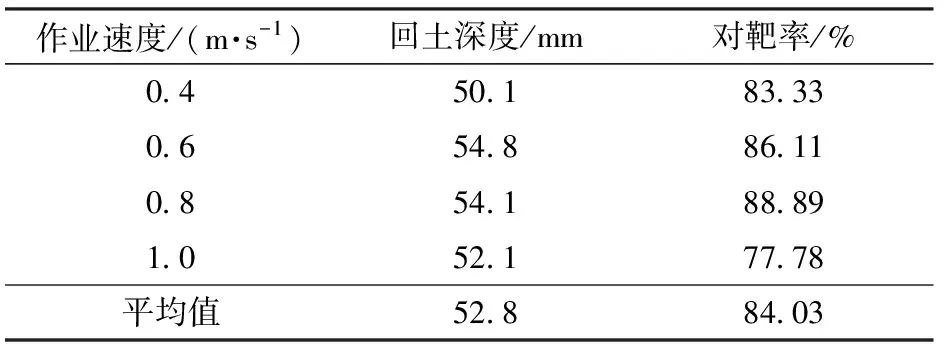
表2 田間試驗結果
由表2可知,深施型液肥對靶點施裝置的平均回土深度為52.8 mm,平均對靶率為84.03%。回土深度隨著作業速度增加先增大后減小,對靶率隨著作業速度增加先增大后降低。當作業速度增加時,回土深度先升高后降低。在速度0.4~0.6 m/s范圍內,速度較低時,開溝器各曲面結構擠壓土壤導致土壤粘結不易回落,隨著速度增加,開溝器滑切刃對土壤滑切作用增強,回土深度升高;在速度0.6、0.8 m/s時,回土深度較為穩定,分別為54.8 mm和54.1 mm。在速度1.0 m/s時,回土深度降低原因是隨著速度增大,開溝時土壤外拋量增多,回土深度降低。
液肥對靶點施系統隨著前進速度增加,對靶率先升高后略有降低,原因是在速度0.4 m/s時,噴肥針到達施肥區域的時間超過系統響應時間,導致系統提前施肥。當速度為0.6~0.8 m/s時,對靶率較穩定。隨著作業速度達到1.0 m/s,由于作業速度較快,噴肥針到達施肥區域時間略短于系統響應時間,導致施肥滯后,對靶率降低。田間試驗結果表明深施型液肥對靶點施裝置回土覆肥性能較好,液肥點施系統運行穩定,作業滿足裝置設計要求。
6 結論
(1)設計了一種深施型液肥對靶點施裝置,該裝置檢測植株位置并依據植株位置進行液肥定點深施。該裝置對靶施肥性能穩定,液肥覆埋效果較好,滿足液肥深施作業要求。
(2)設計了液肥深施開溝器,構建了開溝器與土壤間力學接觸模型,解析了土壤回落原理,確定了開溝器結構參數,提出了液肥深施開溝器性能要求,應用EDEM驗證了液肥深施開溝器結構的可行性。
(3)利用光電傳感器和電磁閥的協同作用,設計了一種液肥對靶點施系統。光電傳感器檢測作物植株位置,測速模塊監測前進速度,實時調節電磁閥開啟時機,以保證施肥位置滿足液肥深施農藝要求。
(4)田間試驗表明,深施型液肥對靶點施裝置平均回土深度為52.8 mm、平均對靶率為84.03%,回土覆肥和對靶施肥作業性能穩定。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
