基于PSO優化ESO的光電穩定平臺自抗擾控制*
2023-01-06 05:43:54鄭偉倫夏駿達王子涵
計算機與數字工程 2022年10期
關鍵詞:優化
鄭偉倫 夏駿達 王子涵 李 軍
(南京理工大學 南京 210094)
1 引言
無人機載光電平臺具有多領域、多通道的優勢,可對目標實現圖像跟蹤、紅外成像、激光探測等多項監測與集中顯示[1~2],其應用范圍越來越廣。而無人機在動態情況下所引起的載體姿態變化,會造成光電傳感器瞄準線軸指向不穩、圖像成像模糊、乃至丟失跟蹤目標。為保持平臺具有高質量的穩定跟蹤能力,采用串聯型兩軸穩定平臺,隔離載體對光電系統的角運動干擾,精確保持光學傳感器視軸指向的能力,實現對目標的高精度穩定跟蹤[3~4]。
目前主流的穩定平臺控制系統仍是以PID控制等經典控制技術為主,但針對于光電穩定平臺提出的高精度、高動態的要求,經典PID顯得力有未逮[5]。為了保留其不依賴模型和較好穩定性的優點,韓京清院士在提取經典PID的精髓“利用誤差來消除誤差”,并融入現代控制理論思想,提出了自抗 擾 控 制(Active Disturbance Rejection Control,ADRC)理論[6]。其核心思想為將所有作用于被控對象的不確定因素以及外部擾動都歸類為總體擾動,通過擾動觀測器對其做出估計并進行總體補償。因此,自抗擾控制對模型的依賴性進一步下降,其控制精度與動態性能也大大提升[7~8]。但是ADRC引入較多參數且缺乏實用的參數整定方法,因此設計效率較低,控制效果也無法充分體現。而對多目標進行參數優化的算法中,粒子群算法由于其收斂速度、計算效率高、通用性強等優點,被廣泛應用于控制器參數尋優之中[9]。
本文針對光電穩定平臺對擾動隔離的高精度要求,設計了一種ADRC控制器,針對陀螺反饋信號的時滯問題采用時滯環節的微分預估法,并采用粒子群算法(PSO),動態調整擴張狀態觀測器(ESO)誤差估計系數,實現對參數的自動尋優。
2 光電穩定平臺數學模型
本文研究對象為無人機載兩軸光電穩定平臺,采用直流力矩電機直接驅動,根據陀螺儀檢測平臺相對空間坐標系的角速度與位置,控制平臺穩定,并通過圖像得到目標點與實際視軸之間的誤差信息,驅動電機穩定跟蹤目標。考慮到兩軸之間呈正交狀態、其耦合擾動較小,可以忽略不計。因此,本文以方位軸控制器設計為例進行說明,俯仰軸控制策略與方位軸類似。
該平臺要求在2度1Hz的擾動下,誤差精度為1mrad,為保證系統的抗擾性能,本文利用MEMS陀螺,設計了速度與位置的雙環控制系統。內環采用積分分離的PI控制器;外環利用四元素解算獲得的載體位置信息設計位置穩定環,設計了PSO-ADRC控制器。
由直流力矩電機模型,采用系統辨識的方法獲取其電機參數,可得系統模型為

3 自抗擾控制器
本文采用二階自抗擾控制器,并改變了微分預估器位置,其結構如圖1所示。
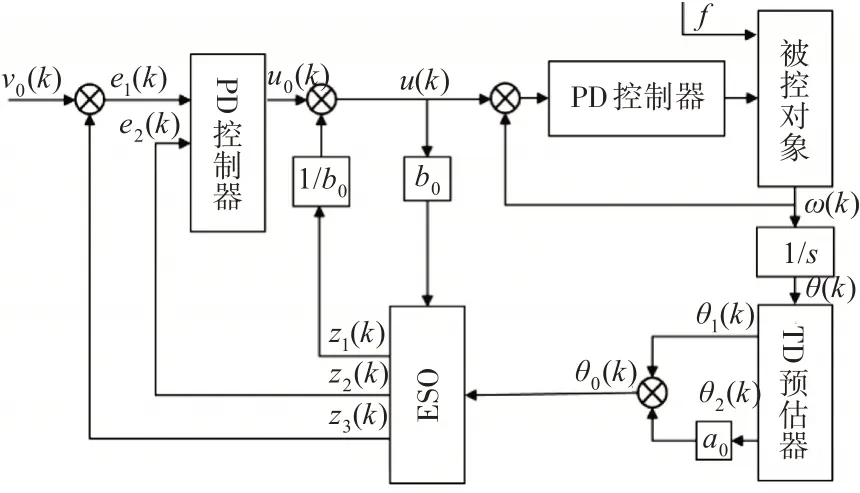
圖1 二階自抗擾控制器結構圖
3.1 時滯環節的微分預估法
在系統控制中,陀螺采樣速率達到了1KHz,但在陀螺的硬件之中內置了40Hz的低通濾波器,此外軟件的窗口濾波處理、陀螺姿態的四元素法解算,均引入了時滯環節,其總體的時滯相對于本系統1ms的控制周期而言,是不可忽略的,其形式可以記為G(s)e-τs。根據Smith預估原理,可以將被控對象的輸出設為θ,預估器輸出為θ2,經過預估補償后的輸出為θ0,則有[10]:

利用一階泰勒級數將時滯環節展開,然后進行Laplace反變換,可得:

而ADRC算法中,包含了微分跟蹤器環節,可由θ求取θ0,并將θ0和u作為觀測器ESO的輸入信號。考慮到微分跟蹤器求解具備濾波功能,可采用微分預估器取代Smith預估,則θ0的算法如下:
其中θ1≠θ。
3.2 擴張狀態觀測器ESO的設計
由微分預估得到的系統輸出值θ0與控制量u可對系統總擾動進行預估,其表達式為

其中:zi(i=1,2,3)為ESO的輸出,分別為狀態θ1,θ2及 總 擾 動 的 觀 測 估 計 值;ESO的 增 益β0i(i=1,2,3)為可調參數;ESO的觀測誤差為e1(k),fal(e,ai,δ)為構造的非線性函數。
3.3 線性狀態誤差反饋控制器
經由圖像輸出作為給定輸入,與經過預估分析的反饋信號觀測而來的狀態量z1,z2形成誤差量,將其作為控制器的輸入信號。作為串聯型系統的一環,這里采用線性控制率達到穩定效果。其控制率為

如上所述的ADRC控制器中,微分預估器主要用于克服MEMS陀螺的數據時滯,基本為固定值;而控制器采用了PD控制,可以通過PID調參的方式進行快速整定;擴張狀態觀測器作為ADRC的核心,包含非線性環節,其參數直接影響擾動觀測精度,對系統的抗擾性能影響極大,因此結合改進的粒子群算法,對其擾動估計系數β0i進行在線優化,使“觀測”輸出信號與“總擾動”信號之間的均方差為最小。
4 改進PSO算法優化的ESO
粒子群算法是一種基于種群的優化算法,其基本思想源于種群中個體之間相互協作與信息共享尋求最優解,具有精度高、收斂快等特性。而且由于其不存在交叉和變異的過程,其運算量大大減小,非常適合在線參數尋優。
圖2是采用PSO動態優化的ADRC控制器。PSO優化擴張狀態觀測器的三個參數β0i,需要利用控制量,并傳入預估補償之后的角位置信息。為了保證優化算法的實時性,對PSO優化條件設定誤差閾值。當誤差小于閾值時,由ADRC自身的抗擾能力進行穩定控制,不需要PSO優化。當穩定平臺擾動較強,誤差信號大于設定的閾值,才進入粒子群算法進行實時整定觀測器參數[11~12]。
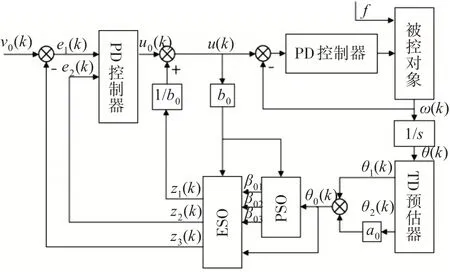
圖2 粒子群優化的二階自抗擾控制器結構圖
4.1 適應度函數
采用粒子群算法進行參數尋優,其關鍵在于適應度函數的選擇,直接影響算法的尋優品質。與基于導數信息進行優化的方法相比,PSO算法對適應度函數的要求較低,對其連續性和可微性均無限制,因此設計更為靈活。為了提高觀測器的觀測精度,綜合考慮快速性與穩定性,在均方差指標的基礎上,選擇常用的適應度函數(ITAE),如式(7):

其中,e(τ)表示系統反饋值與估計值的誤差值,τ時間系數可以保證過渡過程的穩態誤差能消除。
4.2 自適應權重
同樣PSO算法也存在固有缺陷,其更容易陷入局部最小值,無法收斂至全局最優。其迭代公式如下:

由式(8)可知,粒子更新速度主要受慣性權值w的影響。當w取值較大時,粒子的運動速度變化快,在全局尋優性能較強,但不利于后期尋找最優值;當w取值較小時,粒子運動速度變化小,無法在大范圍內搜索,容易陷入局部最優值。常見調整慣性權值的辦法是線性調整法,根據其迭代次數的變化而改變其值,但會存在陷入局部最優的情況。

為了平衡PSO算法的全局搜索能力及局部優化能力,本文引入非線性的動態慣性權重系數:
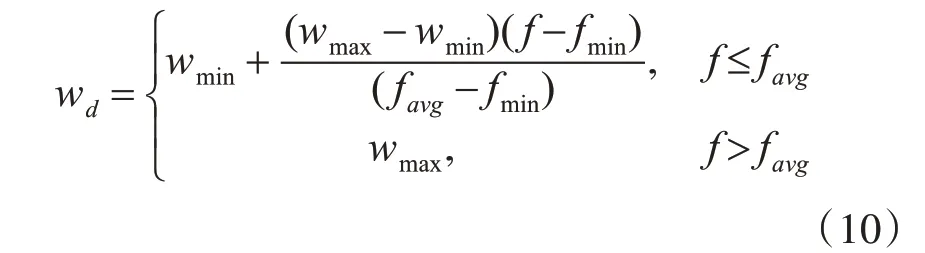
式中wmax與wmin分別代表權重的最大最小值,f為粒子適應度,favg,fmin分別為當前粒子的平均適應度和最小適應度。
式(10)中wd會隨f進行調整,對于f較優的粒子,減小其w值,在其附近尋求最優值;而f趨于一致或趨于局部最優時,w增加,增加其搜索廣度,使得粒子尋找全局最優解。
綜合上述兩種方式,得出新的慣性權重公式為

4.3 PSO算法流程
確定其適應度函數后,整個優化流程如圖3所示。

圖3 PSO參數優化流程圖
初始化完成之后求解粒子適應度,判定個體最優值與全局最優值,若不滿足控制要求,再計算慣性權值,并更新粒子的位置與速度,反復迭代,直至尋到最優解。
5 系統仿真
根據第二節給定的穩定平臺數學模型,在Matlab/Simulink中搭建方位軸的仿真模型,并設計穩定環節的ADRC控制器,實現PSO對觀測器的參數優化,仿真模型如圖4。
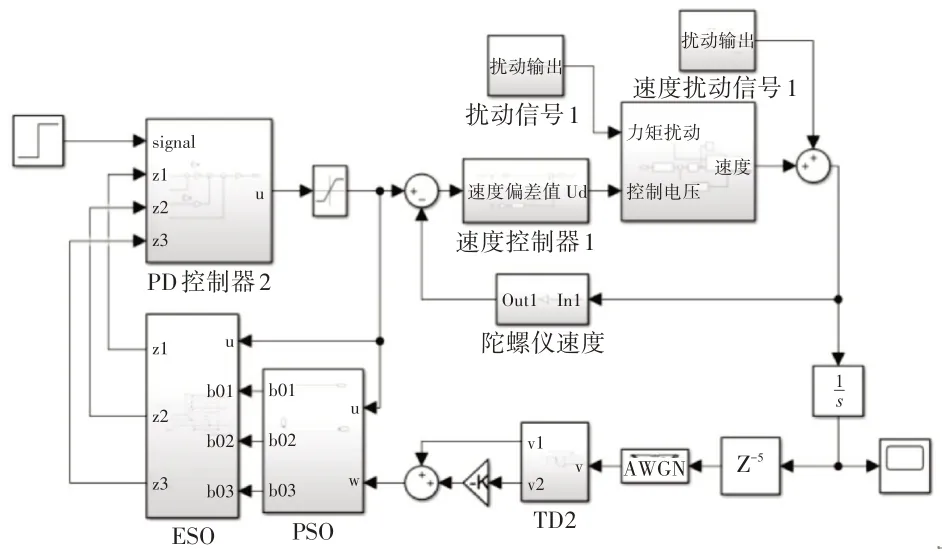
圖4 光電穩定平臺仿真模型
為了驗證系統的穩定性能,對比PSO-ADRC與ADRC兩種控制器在在給定階躍信號下時不同的擾動及負載情況下的穩定精度,并且對比其在正弦信號下的跟蹤精度。
為了保證控制系統運行穩定,將其速度值限制在1.5rad/s,其控制器參數分為ADRC與PSO兩部分,確定參數部分如表1所示。
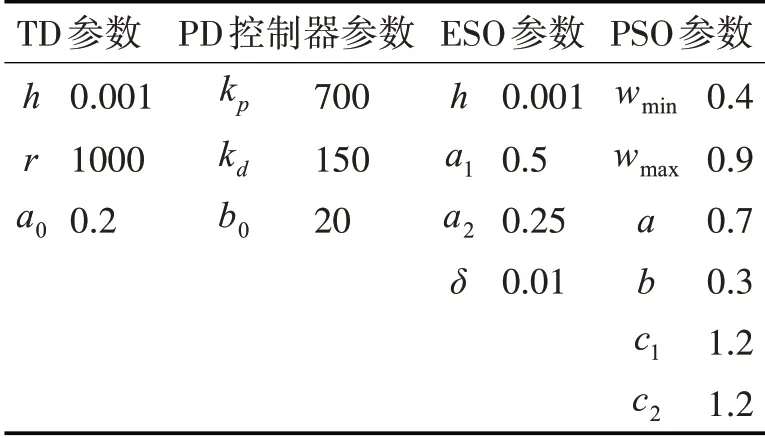
表1 ADRC與PSO部分參數
將普通ADRC控制器的三個觀測系數β01、β02、β03分 別 設 置 為100,1500,5000,設 定PSO-ADRC控制器初始種群數為30,最大迭代次數為30,PSO誤差閾值設置為2%,通過迭代尋求觀測系數的最優值。給定1rad階躍信號,其參數尋優歷程圖和優化參數控制曲線分別如圖5和圖7所示。由圖5,可知PSO參數優化后控制器超調量為2.1%,調節時間為1.1s,優于常用的ADRC。2s時突加負載的情況下,PSO優化的ADRC抗擾動能力更強,位置波動峰值小于7mrad,并在0.3s內恢復穩態,完全可以滿足穩定平臺性能要求。

圖5 角度跟蹤響應曲線圖

圖7 最優個體適應度曲線
針對系統的抗擾能力,考慮施加系統要求的2度1Hz的正弦位置信號,等效于速度環上施加0.219sin(2*pi*t)的擾動信號,由圖6可知,其引起的擾動信號可以降低至0.05mrad,也優于經典ADRC控制器。
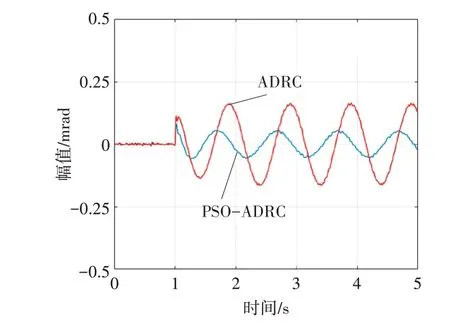
圖6 正弦擾動信號響應曲線圖
6 結語
本文針對無人機載的光電穩定平臺,設計了速度與位置雙環的穩定控制,其位置環采用PSO參數優化的ADRC控制器,通過變權重的粒子群算法優化擴張狀態觀測器的三個觀測權值。通過對方位軸伺服控制及擾動補償的Simulink仿真,證明了該控制器能穩定、精準地補償載體的姿態擾動,穩定精度達到1mard以上,對光電穩定平臺的算法實現具有重要的指導作用。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
