基于飼料集中供應分配系統的多池塘投飼系統設計
2023-01-07 04:11:36葉高文
漁業研究 2022年6期
關鍵詞:系統
葉高文
(廈門海洋職業技術學院,福建 廈門 361100)
目前,國內中小水產養殖場喂料大部分采用人工拋料的方式,但人工拋料不能保證喂料的均勻性,而且勞動強度大,甚至造成飼料浪費、污染水質、影響養殖對象的生長發育,增加養殖成本[1-2]。在飼料投飼裝備研發和應用方面,西方發達國家比我國發展早,技術也更先進,如美國ETI公司研發的具有高精度、高可靠性和大容量的Feedmaster投飼系統,芬蘭Arvo-Tec公司研發的機器人投飼系統,日本Nitto Seiko公司研發的具有先進水平的小料倉投喂模式系統等,在這些國家,自動投飼設備應用已經比較普遍[3]。而在我國整體飼料機械行業技術研發比較薄弱的大背景下[4-5],國內有一些公司開始投入到投飼系統的研究和生產,如南京漁聯網科技有限公司的智能投料機、廣州中浪科技有限公司的管道投料機、浙江富地機械有限公司的工廠化養殖投飼系統等。同時,國內相關行業專家也在不斷嘗試開發自動投飼設備。胡昱等研發出深水網箱自動投飼系統,通過可編程邏輯控制器(Programmable logic controller,PLC)控制繼電接觸器來控制各個設備的啟動、停止,動態定時、定點及定量的投飼,實現精確投飼[6]。田應平等設計了一套適用于室內工廠化養殖的自動投飼系統,該系統具有監測報警、自動投飼等功能,實現了飼料的全天候實時自動投放以及遠程監控[7]。汪萬里等研發了新型對蝦養殖投飼裝置,采用輪式的移動方案,實現了移動過程中進行投喂的功能,克服了當前對蝦養殖過程中人工投飼的缺陷[8]。
綜上,國外的設備先進,但價格昂貴;國內的研究大多是針對單一的中大型養殖場,而國內中小養殖戶一般都有多個中小養殖池塘,同時購買多套國產設備成本過高,以致于目前很多中小養殖戶仍采用人工投料的方式。本項目針對當前中小養殖戶的現狀,設計了一套以PLC技術為基礎的飼料集中供應系統。該系統主要包含飼料供料、輸送、集中分配、拋料和監控等系統,通過集中供料、多路配送,可實現向多個養殖池塘(本文所寫的池塘是指可養殖各類水產品的場所)進行長距離、大容量的投飼。使用該系統,操作人員只要在控制室內就可以進行投飼操作以及遠程監控。該系統的投入使用,對廣大中小養殖戶而言,成本是適中的,不僅可以減少對水產技術管理人員的依賴,減輕管理人員的勞動強度,還能提高生產效率。
1 飼料集中供應系統總體設計
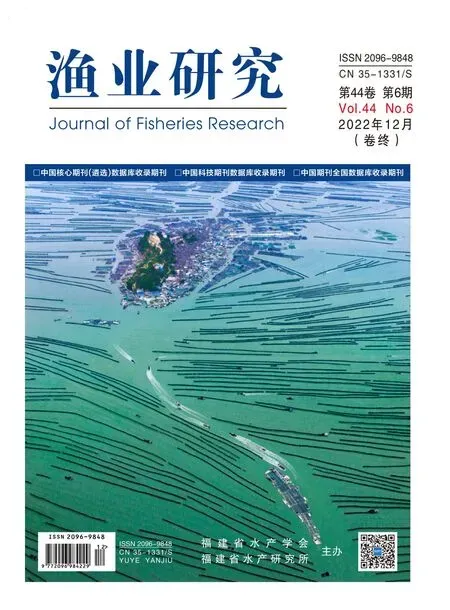
飼料供應系統作為智慧養殖業的一個子系統,主要作用是將飼料高效、低成本地輸送到池塘相應區域。為實現該目的,本項目設計了飼料集中供應系統,由5個子系統組成,如圖1所示,分別是:1)飼料供料系統;2)飼料風機輸送系統;3)集中供料飼料分配系統;4)飼料拋料系統;5)飼料集中供應監控系統。其工作原理是風機輸送系統提供氣體動力,料倉裝置中的飼料經供料裝置進入管道,風機輸送系統產生的高速空氣流在供料裝置出口附近產生一個負壓區,在負壓及加速氣流的作用下,氣流和飼料顆粒的混合物通過分配系統出料口進入輸送管道并被輸送到養殖池塘。分配裝置通過監控系統控制旋轉以達到不同的出料口,每個出料口通向不同的養殖池塘的拋料系統,從而實現多個池塘投料。本項目設定的投料能力為2 500 kg·h-1,以下電機參數選擇均按此目標進行。
飼料集中供應設計,具有以下優點:1)輸送距離遠,加上中繼站,輸送距離可更遠;2)可降低飼料運輸和道路建設成本;3)投料面積可調,噴灑均勻;4)可自動用高壓空氣清洗管道,不會殘留飼料;5)耐用、安全、易操作及環保等。
2 飼料集中供應系統各子系統設計
2.1 飼料供料系統設計
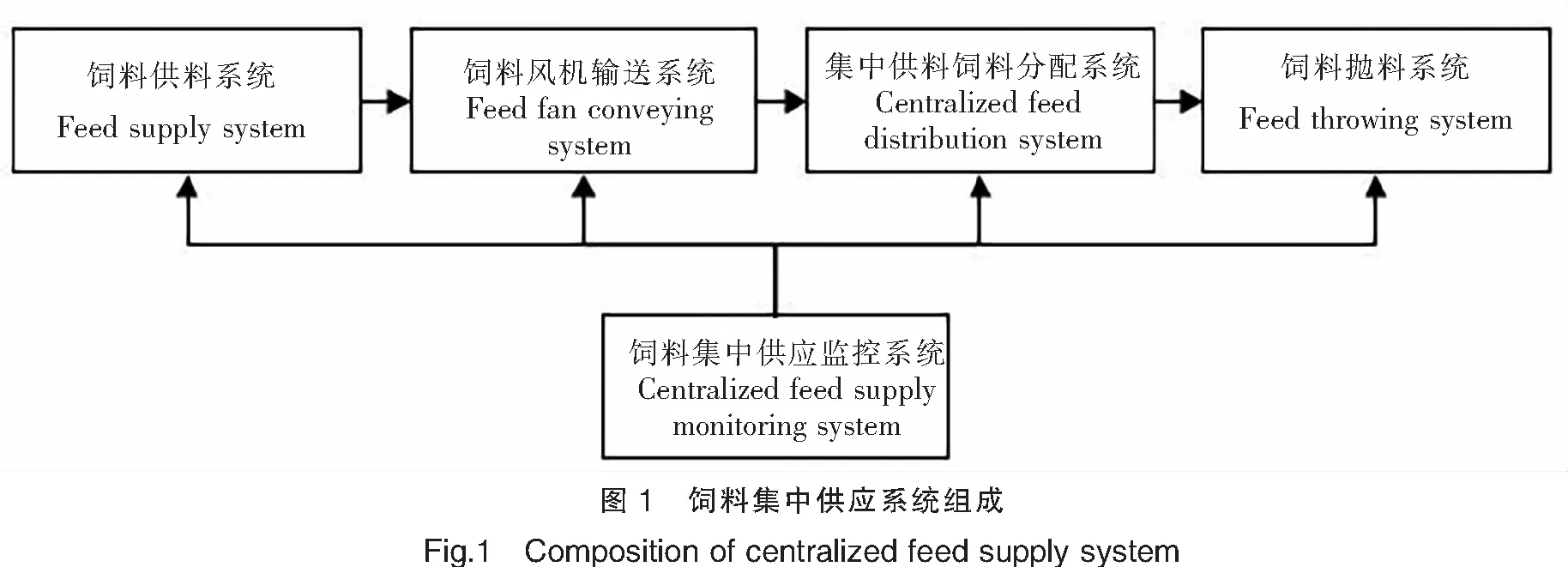
如圖2所示,由于齒輪泵的流量與轉速成線性關系,且其成本低、結構緊湊、體積小、轉速范圍大及耐沖擊性能強等優點[9-10],因此飼料供料系統選擇由料倉和齒輪泵供料系統組成。料倉的裝置采用料斗式,其容積可以根據實際的需要定制,材質采用304鋼。料倉的底部與齒輪泵上端進料口相連,齒輪泵與電機通過聯軸器連接,齒輪泵另一端延伸到送料風管,齒輪泵機構可以將料倉底部飼料輸送到送料風管內。通過調節直流電機的轉速,可準確控制投料量,實現智能投料。
齒輪泵驅動電機功率N1計算式:
N1=PQ/η
(1)
式(1)中:N1—電機驅動功率,W;P—泵出口壓力,Pa;Q—齒輪泵流量,m3·s-1;η—齒輪泵效率。
由于顆粒飼料密度一般為1.0~1.3 g·cm-3,齒輪泵效率約為0.7~0.9,管道壓力約為1.6×105Pa,按照投料能力及齒輪泵效率取0.9代入進行計算,并考慮余量,因此驅動電機功率取150 W。本系統齒輪泵電機采用直流電機,選擇電機功率為150 W,電壓24 V,額定轉速1 800 r·min-1。需要說明的是,實際系統可以根據投料能力的不同要求,選擇相適應的齒輪泵及配套電機。
齒輪泵直流電機的速度調控通過控制電機的工作電壓實現。電機工作電壓通過PLC的脈沖寬度調制(Pulse width modulation,PWM)方法,可方便地控制負載端的平均電壓,在脈沖的低電壓趨近于0時,負載的平均電壓與PWM的占空比成正比[11]。本系統使用S7-200PLC的PWM脈寬調制功能,通過PWM配置向導進行配置,周期為500 ms。電機轉速可以根據實際需要在觸摸屏上設置不同的擋位進行控制。本項目設置為3個擋位,對應PLC地址分別為M10.0、M10.1、M10.2,對應的占空比分別為0.3、0.5、1.0,通過PLC編程實現。
2.2 飼料風機輸送系統選型
鑒于壓送式氣力輸送裝置具有輸送距離較遠及可同時把物料輸送到多處的優點,根據養殖業的投料特點,本送料系統選擇離心式送料風機[12]。本系統由送料風機和送風管組成。由于聚氯乙烯(Polyvinyl chloride,PVC)具有耐壓、耐磨和質量輕等特點,通常選擇PVC管作為送風管,直徑為50 mm。風機驅動功率經驗計算式[13]:
N2= 1.15×1.2Q1Pm
(2)
式(2)中:N2—電機驅動功率,W;Q1—系統工作風量,m3·min-1;Pm—管道總壓力降,kPa。
為滿足該項目設計的投料能力,根據式(2),并結合市場上常用的風機參數性能,本項目風機電機參數為:風機功率為7.5 kW,線電壓為380 V,額定電流為15.5 A,額定轉速為2 800 r·min-1。
2.3 集中供料飼料分配系統選型設計
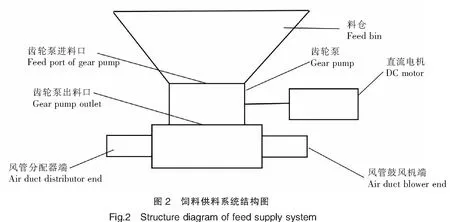
飼料分配系統采用旋轉分配器。飼料風機輸送系統輸送過來的飼料進入旋轉分配器上方的進料口,下部有多個出料口,每個出料口對應一個池塘,出料口可以根據需要進行定制,出于成本考慮,分配器結構采用如圖3所示。為滿足該項目設計的投料能力,該旋轉分配器的動力使用單相交流電機,交流電機額定功率為550 W,額定電壓為220 V,額定轉速為1 400 r·min-1。交流電機的啟動和停止由PLC進行控制。通過鍵套聯接帶動旋轉管,實現旋轉管進料口與下座出料口的匹配對接,分配器旋轉對接定位由行程開關提供信號,發送給S7-200PLC,PLC發出信號對動力電機進行啟停控制,從而實現定位對接。驅動電機位置在分配器的下方,將分配器裝置外殼上部的進料管作為旋轉軸心,導套套進進料管,聯結裝置的支座設計成圓臺型,其斜邊與水平面成一定夾角,該夾角與旋轉管的傾角一致。該旋轉分配器制造工藝及結構都比較簡單,安裝維護方便。若對管道密封性要求高,可以采用成本更高的帶有風網和吸風裝置的旋轉分配器[14]。集中供應分配系統的電機,也可以使用步進電機,從而使分配器機械機構可以簡化,定位更加精準。
2.4 飼料拋料系統設計
每個池塘的飼料拋料系統由3個浮球、輸送管道、拋料電動機、支架、拋料裝置等組成,如圖4所示。浮球的主要作用是確保拋料裝置處于水面之上一定的距離,綜合考慮成本及穩定性,設計采用3浮球結構。考慮到腐蝕等因素,支架和拋料裝置上的拋料金屬管采用不銹鋼材料制作。
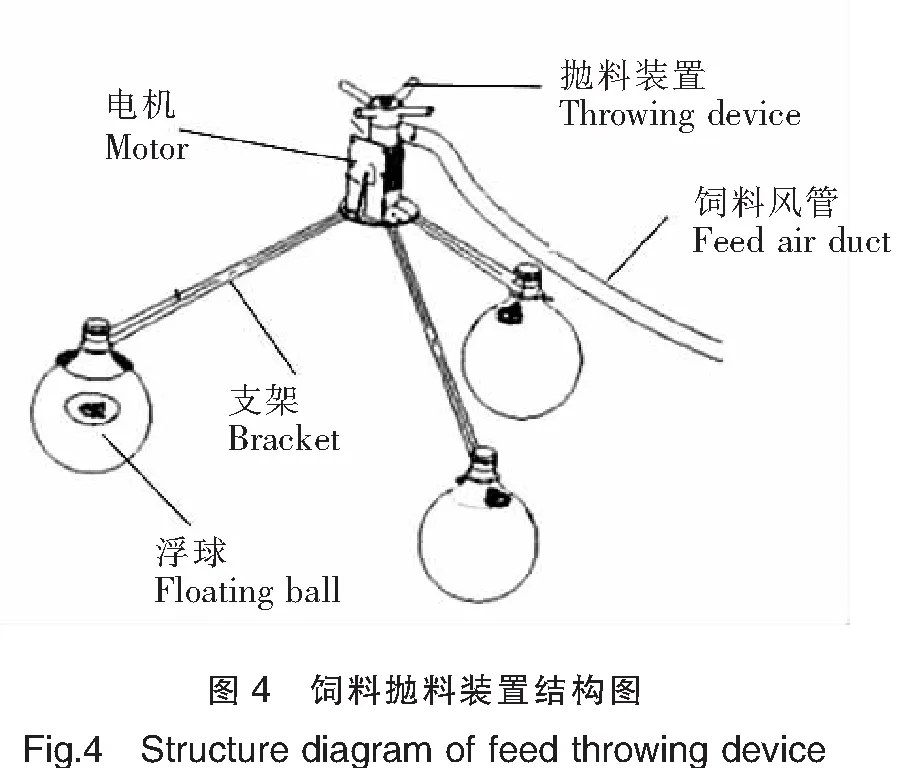
根據本項目的投料能力要求,參考行業的配置經驗,電機采用單相交流電動機,電機額定功率為2.2 kW,額定轉速為2 800 r·min-1,額定電壓為220 V,額定電流為8.0 A。浮球直徑約44 cm。該拋料電機只能按固定轉速進行,對同一種飼料的拋料半徑相對固定。如果拋料的范圍固定,養殖生物覓食的空間也相應很小,而且擁擠覓食會造成局部嚴重缺氧,當溶解氧不足以維持生命之需時,養殖生物群會本能地逃離,造成飼料浪費和水質污染以及影響養殖生物的生長。因此,系統可以根據養殖對象的需求,通過增加1個變頻器,借助變頻器良好的調速性能,以很好地控制拋料電機的轉速[15],從而更加靈活地控制拋料范圍,但會增加購買變頻器的成本。
2.5 飼料集中供應監控系統設計
飼料集中供應監控系統主要由信息采集系統、信息處理系統及人機界面(Human machine interface,HMI)組成。信息采集系統主要由各類傳感器組成,本項目僅設有水溫傳感器,考慮到使用成本,采集的數據通過有線方式傳送到控制器。基于水產養殖環境比較惡劣[16],出于可靠性的考慮,控制器選擇西門子S7-200PLC(CPU226 DC/DC/DC型),變頻器采用西門子MM420型。HMI采用北京昆侖通態公司的TPC7062KX觸摸屏,組態軟件采用MCGS7.7嵌入版。
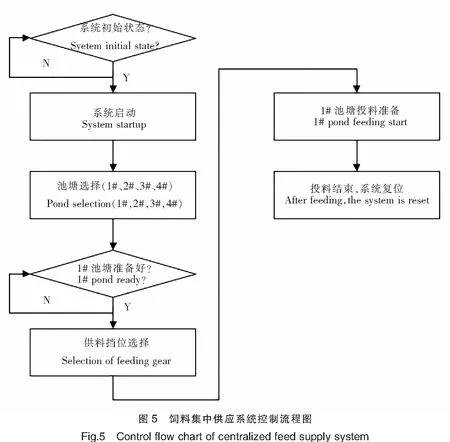
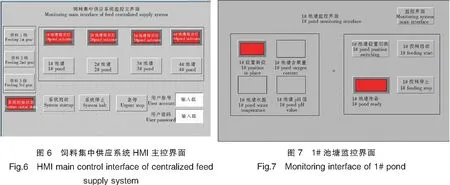
飼料集中供應監控系統PLC控制處理程序流程圖,以1#池塘控制為例,如圖5所示。根據實際投料情況,先將飼料放于料箱。PLC控制系統先判斷集中投料系統是否處于初始狀態,即料箱有料、各類傳感器發回數據正常,然后在觸摸屏上按下系統啟動按鈕。根據實際需要,選擇需要投料的池塘。以選擇1#池塘為例,1#池塘如果準備好,即水溫等各類傳感器發回的數據正常,則先選擇供料擋位,然后啟動1#池塘供料。投料完畢,則按下停止按鈕,使得1#池塘投料參數復位。若所有池塘均投料完畢,則按下系統停止按鈕,所有系統參數復位。在投料期間,任何時候出現緊急情況,都可以按下急停按鈕,停止投料。飼料集中供應監控系統監控主界面如圖6所示,以1#池塘為例,子系統監控界面如圖7所示。啟動屏幕前,需要進行登錄認證。HMI監控界面可以根據用戶需要進行功能增減。
3 測試
受經費和場地條件不足等影響,飼料集中供應的機電系統和監控系統測試是分開的。首先,在廈門海洋職業技術學院的池塘進行機電系統的測試,將以上供料系統、輸送系統、拋料系統等安裝好,利用原有的簡單的繼電器電控系統對以上選擇的機電系統進行測試,選用的是普通的顆粒狀飼料,測試結果為:在輸送飼料管道直徑為50 mm條件下,本項目投料最大輸送距離可達200 m以上,投料區域圓形直徑60~80 m(投料面積可達4 000 m2以上),投料能力可以達到設計預期的2 500 kg·h-1。鑒于監控系統測試的主要是PLC的編程和觸摸屏的通信,本項目監控系統安排在實驗室進行測試。利用4個同類型但功率更小的電機對以上供料系統、輸送系統、分配系統和拋料系統4個電機進行模擬測試,運行結果表明本系統設計的監控系統可以正常運行。需要說明的是,以上測試雖然沒有完全和真實場景一致,但由于監控系統和控制的機電系統主要是受電機的控制,因此測試結果是可靠的。
4 結語
本項目的整體設備及監控系統在池塘和實驗室的成功調試表明,該飼料集中供應系統可以滿足中小養殖戶對多池塘養殖無人值守和智能化自動投料控制的要求,具有較廣闊的應用前景。但整個系統設計受成本限制,因而功能上不夠全面。本項目作為智慧養殖業的一個子系統,未來可以通過增加各類水質檢測及視覺傳感器,比如pH值檢測、含氧量檢測等,通過智能無線傳輸設備,將數據傳送給PLC,PLC通過智能無線傳輸設備,將信息發送到互聯網云端,通過互聯網無線通信設備,將數據發送至手機終端,用戶可以在手機終端實時查看相關信息,并發出命令,對系統進行控制,這將極大地提高系統智能化水平及效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32