無人機航拍技術在養(yǎng)殖用海調查中的應用探析
2023-01-07 04:11:38許春曉
漁業(yè)研究 2022年6期
許春曉
(福建省水產研究所,福建 廈門 361013)
社會經(jīng)濟的高速發(fā)展催生了一批先進的儀器和技術在工程測繪行業(yè)的應用和發(fā)展。其中,以無人機航拍技術在工程測量和測繪中的廣泛應用最具代表性,通過無人機高空飛行與拍攝測量,運用自身的傳感器設備進行測量對象的圖像拍攝與采集后,利用有關圖像處理技術對所獲取的圖像數(shù)據(jù)進行深入分析,從而有效地滿足工程測量測繪與實際需求[1]。無人機技術目前主要應用于航空拍攝、航空攝影、地質地貌測繪、管道線路巡查、海事偵察、環(huán)境監(jiān)測等。近年來,無人機在海洋測繪、海岸帶調查、防災減災等海洋領域發(fā)揮著越來越重要的作用。
無人機航拍技術工作原理是以無人飛行器作為載體,在進行全球導航衛(wèi)星系統(tǒng)(Global navigation satellite system,GNSS)導航與測量單位(Measurement unit,MU)定姿模塊選擇基礎上,利用具有較高分辨率的數(shù)字相機在高空進行地面事物的全面拍攝,對拍攝獲取的圖像資料則利用計算機軟件進行有效處理和分析,從而滿足有關工程的測量與測繪需求[2]。無人機航拍工作主要包括以下幾個方面:野外像控點的布設和測量、取得測區(qū)影像數(shù)據(jù)、內業(yè)空三加密以及數(shù)字測圖[3]。無人機航拍技術在應用過程中屬于新興的測量測繪技術,具備較高的智能化和自動化等特點[4]。無人機航拍設備的體積相對較小、作業(yè)范圍廣、結構簡單,通過遙控器就能對其進行遠程控制,而且通過相關指令的輸入還能使其自主飛行,工作過程相對簡便[5]。相對于傳統(tǒng)測繪,無人機航拍技術受自然條件因素影響小,突破了自然環(huán)境的限制應用,具備較強的靈活性,而且無人機利用低空飛行獲取的高分辨率數(shù)據(jù)和信息,可以滿足海洋測量測繪的需要[6-7]。典型案例有無人機海岸地形測量應用[8]、無人機應用于海岸地形測量[9]、無人機航空攝影技術在廈門灘涂養(yǎng)殖調查的應用[10]。
養(yǎng)殖用海屬于漁業(yè)用海范疇,在福建省沿海地區(qū)海洋經(jīng)濟中占據(jù)重要地位。福建省養(yǎng)殖用海分布較為分散,且養(yǎng)殖用海類型多樣、養(yǎng)殖方式多變,導致養(yǎng)殖用海面積測量難度較大。傳統(tǒng)養(yǎng)殖用海調查是人工采用實時動態(tài)儀器(Real-time kinematic,RTK)對養(yǎng)殖設施邊界進行實地測量,存在工作量大、耗時耗力、效率低等缺點,且形成的調查底圖為點單元,形式單一,無法校核比對測量結果。
本文根據(jù)無人機航拍的技術特點,結合無人機航拍在福建東山八尺門海域養(yǎng)殖用海調查的應用實例,對其技術路線、航線及像控點布設、專題線劃圖勾繪、準確度驗證等有關事項進行實踐探討,總結一套無人機航拍養(yǎng)殖用海調查實施方案,以期為今后其他地區(qū)養(yǎng)殖用海調查提供參考。
1 材料來源與分析方法
1.1 測區(qū)概況
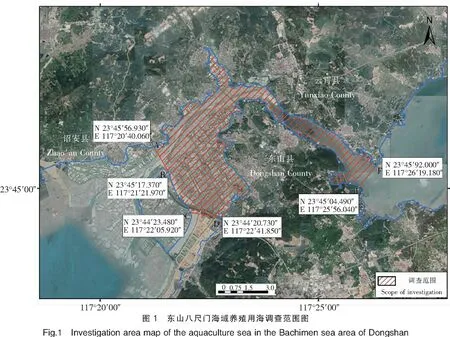
東山八尺門海域位于福建東南的詔安灣和東山灣之間的東山島北端,為兩海灣之間連接的狹長海峽,將福建省第二大島的東山島與大陸分開。東山八尺門海堤建成于1961年,初衷是為了解決進出東山島的交通問題。八尺門海堤長期阻斷東山灣與詔安灣水體交換,造成海堤兩側淤泥淤積嚴重,加之網(wǎng)箱養(yǎng)殖業(yè)的發(fā)展和周邊各類污染物的排放,灣內水質日趨富營養(yǎng)化,造成八尺門海域水環(huán)境惡化[11]。為了解東山八尺門海域養(yǎng)殖用海情況,2020年10月采用無人機對該海區(qū)進行航拍調查,調查范圍面積為696 hm2(圖1)。
1.2 技術路線
1.2.1 總體技術路線
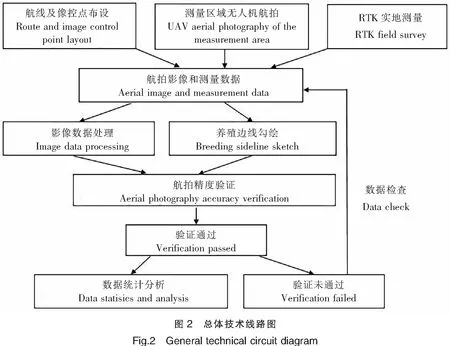
本項目的總體技術路線:首先進行外業(yè)像控點布設,采用RTK測量像控點和檢查數(shù)據(jù)坐標,然后對測區(qū)進行無人機航拍,之后在內業(yè)制作正射影像,并基于正射影像成果采集、養(yǎng)殖專題線劃圖,進行成果精度驗證后用于數(shù)據(jù)統(tǒng)計分析。
1.2.2 航線及像控點布設
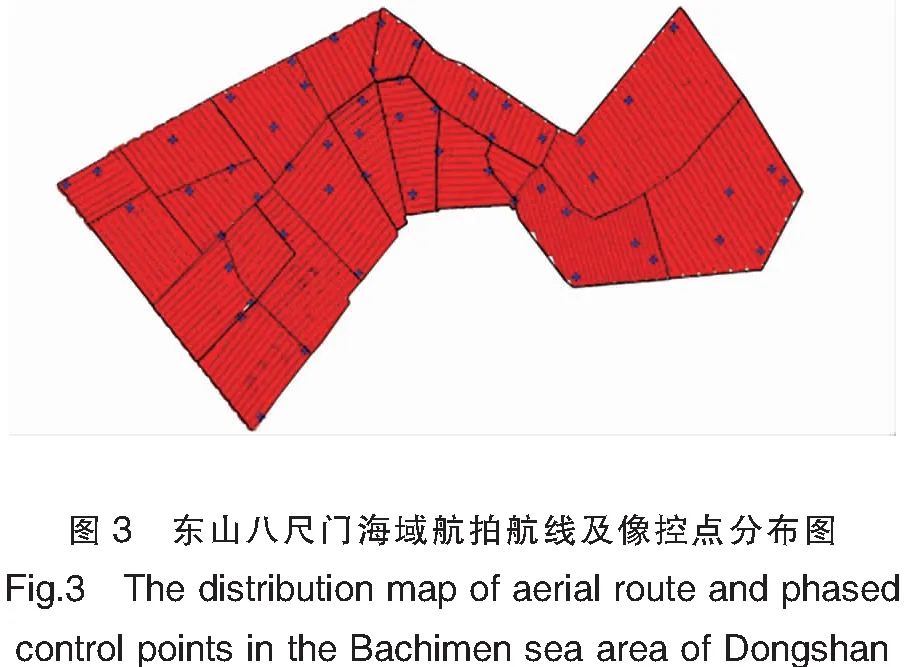
八尺門海域地形復雜多變,養(yǎng)殖類型包括圍墾、底播等。為保證航拍所獲取的數(shù)字航空影像完整覆蓋所測區(qū)域,影像匹配過程中不出現(xiàn)相關的盲區(qū),航拍測區(qū)范圍覆蓋調查區(qū)域,測區(qū)面積約980 hm2。同時為保障項目的精度,在測區(qū)內島礁、碼頭、海堤、近岸民房等特征構建筑物上布設像控點,共計54個。為了更好地凸顯測量要素,將測區(qū)分割為20個小區(qū)塊進行分區(qū)測量,開闊海域航線布設間距相對較大(圖3)。
采用布設地面對空標志的方式進行像控點布設及測量,像控點標志制作遵循以下原則:采用L型標記,測量L內角坐標;L符號寬度不短于20 cm,長度不短于50 cm;地面有明顯標線、尺寸和顏色達標的也可以作為對空標志;像控點用與地面顏色反差較大的材料標記,例如紅油漆、白石灰;位置選擇平地。點位周圍、尤其是上空無遮擋;測定像控點坐標采用三角支架固定,采用控制點測量模式,平滑處理;像控點位置拍照,考慮到無人機的視角,拍照需充分體現(xiàn)像控點與周邊地物的相對位置關系,以便內業(yè)在照片上尋找像控點。
像控點的平面坐標、高程的測定:采用福建省連續(xù)運行參考站(Continuously operating reference stations,CORS)聯(lián)網(wǎng)的全球衛(wèi)星定位系統(tǒng)實時動態(tài)儀器(Global positioning system_real - time kinematic,GPS_RTK),對所有像控點一一測量,以獲取2000國家大地坐標系(China geodetic coordinate system 2000,CGCS 2000)平面坐標(中央子午線為117°,3°帶高斯正形投影),經(jīng)C級控制點計算高程轉換參數(shù)后轉換為85黃海高程。
1.2.3 測量區(qū)無人機航拍
本次航攝采用設備為M300-RTK無人機,航空攝影相機為禪思P1數(shù)碼相機,有效像素 2 420×104,獲取航線垂直向下的真彩色數(shù)碼航空影像,數(shù)碼航空影像地面分辨率優(yōu)于0.1 m。能夠保障穩(wěn)定航攝。
本次航攝航高設置為300 m;航向重疊70%、旁向重疊60%;無人機航飛速度為15 m/s;風力≤10 m/s;選擇光照充分、成像清晰且低潮位時段飛行;分區(qū)實施航飛,在圍墾海堤、碼頭等開闊區(qū)域尋找合適的起飛點,能夠保障安全起飛和返航。
1.2.4 現(xiàn)場實際測量
采用中海達R2 RTK,外業(yè)測量五宗村集體養(yǎng)殖池塘圍堤外側坡頂線數(shù)據(jù),用于檢查內業(yè)測圖成果。
1.2.5 影像數(shù)據(jù)處理
本測區(qū)空中三角測量,采用Pix4D V3.25自動空三測量加密軟件。采用全片密集自動選點、點位均勻分布方式,構網(wǎng)力度強,航線區(qū)域網(wǎng)局部平差與光束法整體平差技術,可增強粗差檢錯能力,有效地降低構網(wǎng)的系統(tǒng)誤差,提高加密精度和可靠性。
圖像預處理:檢視影像的清晰度、色彩、對比度等,剔除不合格的影像;檢視POS參數(shù),剔除不合格的數(shù)據(jù);進行數(shù)據(jù)預處理,檢查航向重疊、航線間距、航線偏角是否符合要求。
航空攝影平差計算:自由網(wǎng)平差計算、約束網(wǎng)平差計算;輸出平差報告;輸出影像的內、外方位元素。
DEM的制作:創(chuàng)建立體模型-生成核線影像-影像自動匹配-匹配點編輯-DEM 自動生成-DEM 編輯-裁切和分幅。
DOM 制作:Pix4D V3.25進行自動正射糾正,自動勻色,鑲嵌成圖、色彩精編,分幅與裁切。
正射糾正:應用實測像片控制點,結合預處理后的 DEM,基于有理多項式函數(shù)模型,應用軟件對影像進行批量數(shù)字微分糾正。
影像勻光、鑲嵌與修補:在影像鑲嵌之前選取標準片利用勻光軟件,減少相鄰圖幅、像對之間的接邊誤差和色彩差,依據(jù)標準片的參數(shù)對融合后的影像進行勻光,使用PhotoShop對DOM進行局部色差調整,以弱化色差。
影像裁切:按照1∶1 000標準分幅(50 cm×50 cm),用 ArcGis 10.0軟件,直接按內圖廓批量裁切出圖,分幅文件嚴格拓撲,外擴距離為0,影像格式為標準TIFF格式,分幅文件以圖幅號命名。
1.2.6 養(yǎng)殖邊線勾繪
基于航測1∶1 000正射攝影測量成果,采用南方數(shù)碼iData3D立體測圖軟件進行航測數(shù)據(jù)采集,南方數(shù)碼CASS 9.0軟件編繪成圖。圍墾區(qū)域重點采集池塘和養(yǎng)殖水面,對池塘和海堤的頂部及底部等標注高程特征點。圍墾池塘堤岸寬度達到1 m,勾繪雙線堤岸,寬度小于1 m則勾繪為單線,海堤根據(jù)坡度及加固情況,區(qū)分勾繪為陡坎、未加固陡坎、加固斜坡和未加固斜坡。地形以灘涂高程點、航道水深點及等高線為主,少量堤岸,以坡或坎的形式體現(xiàn)。網(wǎng)箱、浮筏養(yǎng)殖主要勾繪養(yǎng)殖設施外側邊線。
2 結果與分析
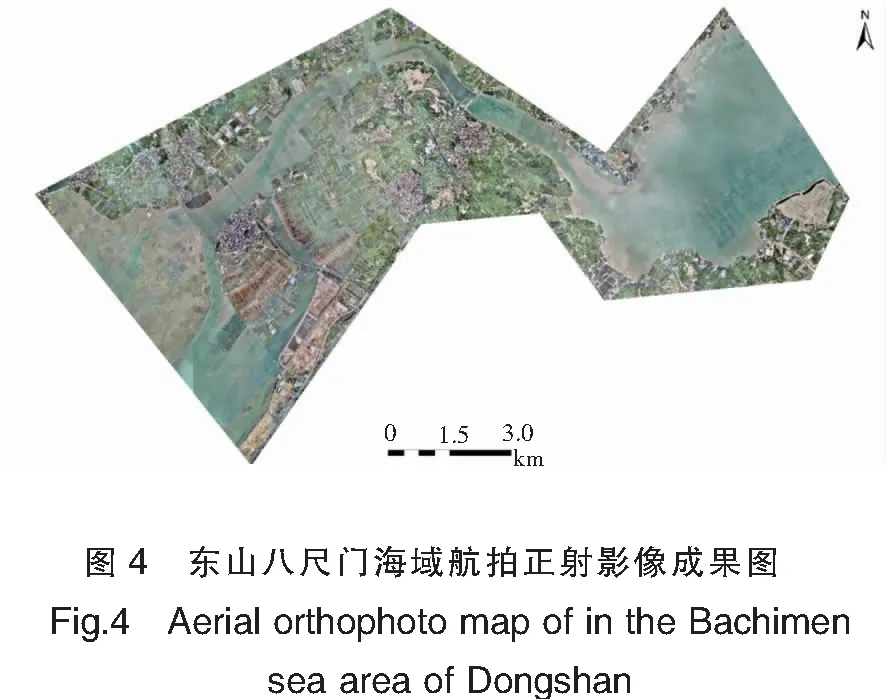
2.1 調查海域航拍正射影像結果
本次通過航拍及內業(yè)數(shù)據(jù)處理,最終獲得的東山八尺門海域航拍成圖圖件影像清晰、層次豐富、反差適中、色調均勻。相同地物的色調基本一致,相鄰航帶之間色彩過渡自然。像片的主要點或者在其相鄰照片上的對應位置上均不存在陰云、大團云陰影與煙霧,不存在單塊云、密云陰影或煙霧使地物變得模糊的面積超過像片的3%。最終形成1∶1 000真彩色數(shù)字正射影像圖(圖4)。
2.2 調查海域養(yǎng)殖專題線劃圖勾繪
根據(jù)以上正射影像,按照養(yǎng)殖邊線勾繪原則,勾繪海岸線內側的海水養(yǎng)殖區(qū)邊線,結果見圖5。
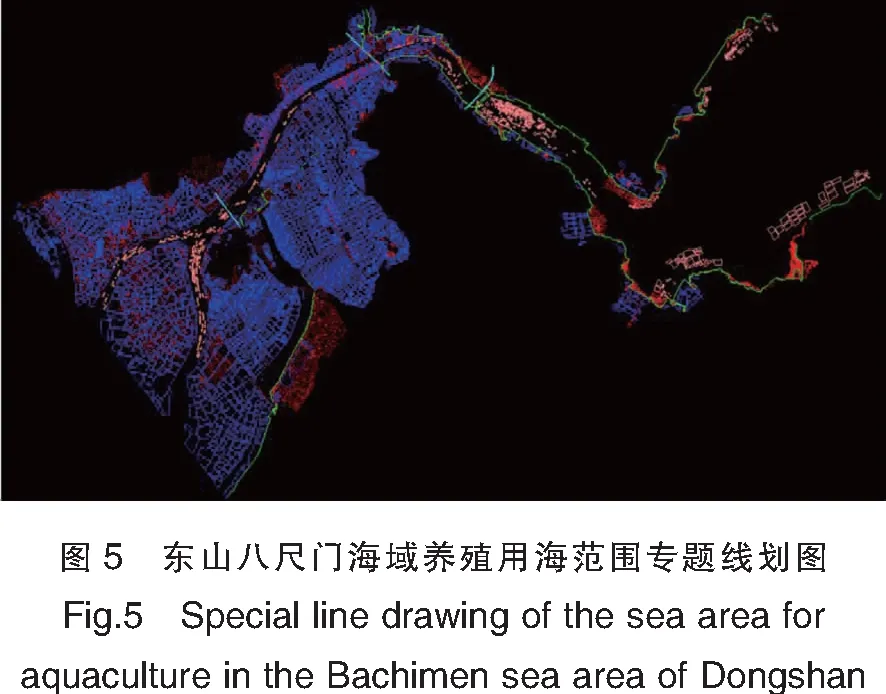
注:圖示藍色為圍墾勾繪線;粉色為網(wǎng)箱勾繪線;綠色為海堤勾繪線;紅色為底播養(yǎng)殖勾繪線;淺藍色為橋梁勾繪線。Notes:Blue was for reclamation;pink was for cageculture;green was for seawall;red was for bottom seeding;light blue was for bridge.
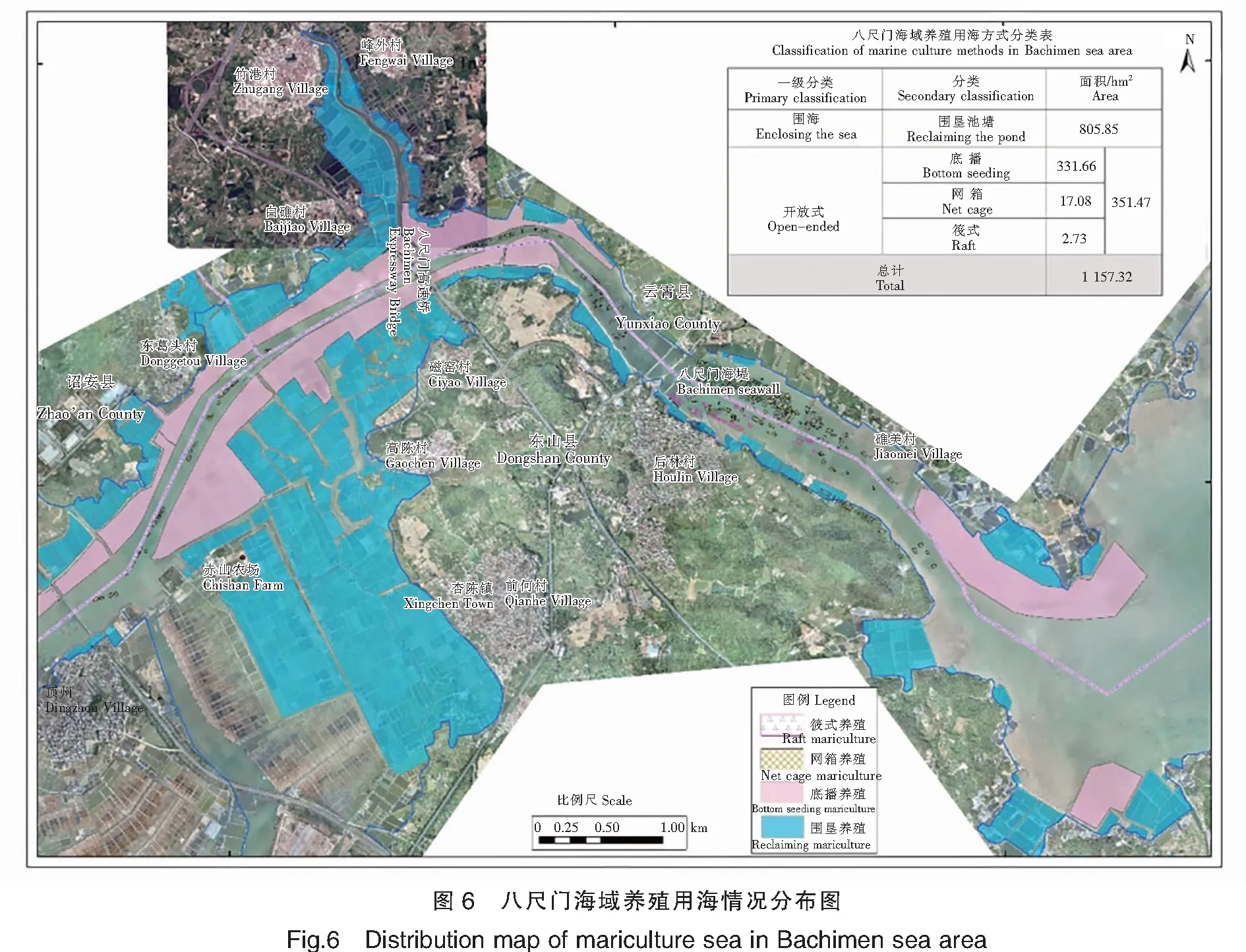
通過無人機航拍圖疊加養(yǎng)殖專題線劃圖,并根據(jù)現(xiàn)場走訪調查,形成了八尺門海域養(yǎng)殖用海情況分布圖(圖6)。圖6清楚地反映出八尺門養(yǎng)殖用海的各用海方式組成和位置分布信息。經(jīng)矢量數(shù)據(jù)統(tǒng)計分析,調查范圍內八尺門海域養(yǎng)殖總面積為1 157.32 hm2,其中圍墾池塘面積為805.85 hm2,占比69.63%;開放式養(yǎng)殖用海總面積為351.47 hm2,占比30.37%。
2.3 準確性驗證
為驗證無人機航拍結果準確性,本項目外業(yè)實地測量了東山縣杏陳鎮(zhèn)埕英村、高陳村和前何村、云霄縣陳岱鎮(zhèn)白礁村、詔安縣四都鎮(zhèn)山后村五宗以村集體為調查單元的養(yǎng)殖池塘,并對五組無人機和RTK實地測量數(shù)據(jù)進行了對比分析,結果見表1。經(jīng)比對,面積差值在0.15%以內,平均差值為0.06%,表明航拍結果能夠滿足養(yǎng)殖用海調查的相關技術要求。
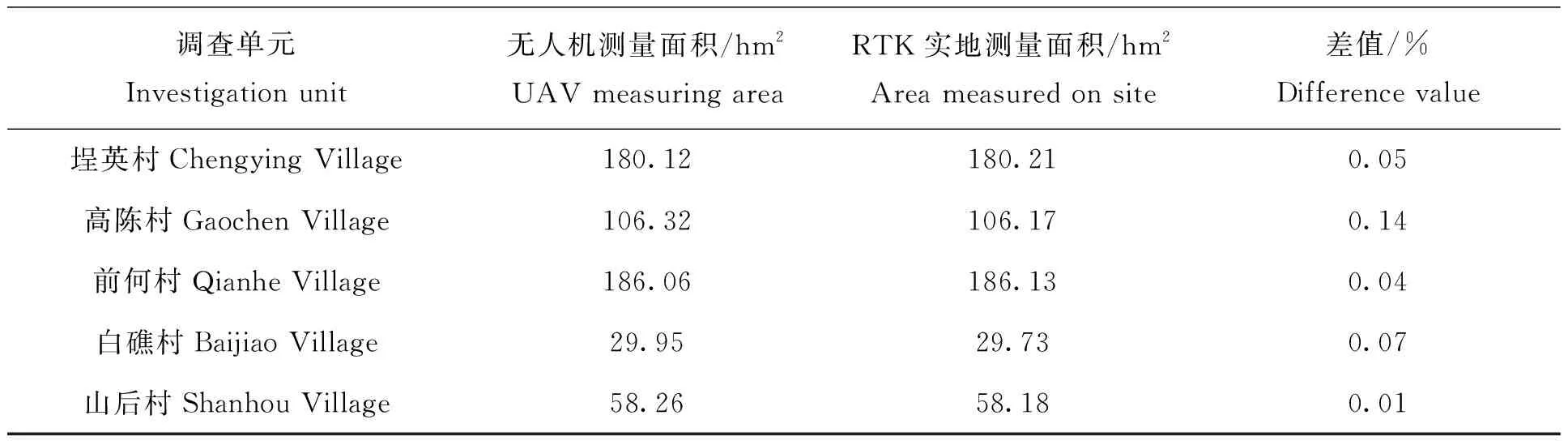
表1 無人機和RTK實地測量數(shù)據(jù)對比表Tab.1 Comparison table of UAV and RTK field measurement data
3 結論
1)傳統(tǒng)養(yǎng)殖用海調查采用RTK人工測量,對圍墾養(yǎng)殖池塘海堤、網(wǎng)箱、浮筏及灘涂外側邊界進行實地測量,工作量大、耗時耗力、效率低,尤其是海上浮筏、局部圍墾拐點、淺灘無法精確定位,導致測量結果存在一定程度的偏差。而采用無人機正射影像測量,實現(xiàn)了高效、高精度圍墾、網(wǎng)箱、灘涂等養(yǎng)殖方式用海界址點的定位,測量結果可視化程度高,同時方便今后權屬界定及核對。從福建東山八尺門海域養(yǎng)殖用海航拍案例可以看出,無人機航拍成果能夠清晰地反映近岸養(yǎng)殖現(xiàn)狀,通過分析各養(yǎng)殖用海類型的特點,勾繪專題線畫圖,得到用海范圍、面積等基本要素,精度能夠滿足養(yǎng)殖用海調查的相關技術要求。
2)海面上漁排、浮筏等養(yǎng)殖設施受潮流和潮位因素影響,存在一定的位移和高程變化,造成像控點布設難度較大。為了保障測量精度,在測區(qū)內島礁、碼頭、海堤、近岸民房等特征建筑物上布置大量像控點,此外選擇上空無遮擋平地,選用與地面顏色反差較大的材料標記,增設像控點。保障像控點能夠最大程度地覆蓋測區(qū)。
3)因測區(qū)面積較大,跨越丘陵、灘涂、淺海等區(qū)域,地形復雜,為了提高航拍拼接精度及效率,將測區(qū)分割成20個小區(qū)塊進行分區(qū)航拍,每個測區(qū)均有像控點分布,且像控點盡量分布在分區(qū)邊界上。
總體上,無人機航拍測量技術是一種新型海洋測繪方法,相對于傳統(tǒng)測繪,具有較強的靈活性,能高效獲取高分辨率的數(shù)據(jù)和信息。影響無人機海洋測繪的主要因素有像控點布置難度大、像點位移會造成影像模糊、航片拼接困難等。本文通過靈活布設像控點、分區(qū)測量及可視化航拍底圖勾繪等技術手段,通過硬、軟件結合的方式,有效地提高了無人機航拍技術在海上養(yǎng)殖用海測量調查中的效率和精度,為海洋測繪量提供了一種新的作業(yè)模式和解決方案。實際測量實踐表明,無人機航拍技術在海洋測繪應用可以滿足業(yè)務化生產作業(yè)的要求,具有較好的實用性,在我國廣闊的海岸帶區(qū)域具有很好的應用前景。
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導向(2019年10期)2019-08-24 06:25:28
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21