基于視覺檢測的自主導航取書機器人的研究
2023-01-07 03:09:18張朝霞馬瑋鴻熊茂華通信作者
信息記錄材料 2022年11期
張朝霞,馬瑋鴻,葉 青,熊茂華(通信作者)
(1 廣州商學院信息技術與工程學院 廣東 廣州 511363)
(2 廣州商學院現代產業學院 廣東 廣州 511363)
0 引言
目前,大多數的大型圖書館已經實現了條形碼和數據庫技術,對圖書的信息管理應用于包括圖書采購典藏和借閱、歸還書籍等環節,到目前為止還未見相關報道在無人干預的情況下,采用基于視覺檢測的自主導航取書機器人自動完成取書借書過程。傳統的圖書館的管理模式、運作模式和操作流程消耗人力、物力較大,效率低,有效工作時間短以及書籍轉運時,可能對圖書有所損壞。除規避上述缺點以外,使用自動取書機器人還可以降低在借還書時由于圖書的放置錯誤而造成的損失[1]。
1 功能需求
針對目前大多數圖書館的現狀,利用視頻檢測技術、自主導航技術等對其進行改造設計,使其能成為自動化、智能化的基于視覺檢測的自主導航取書機器人。本機器人以自主導航車為主體,對其軌跡跟蹤控制提出了新的算法。在Back-Stepping 方法下,結合李雅普諾夫函數,提出了兩種運動控制方法,即基于運動學、動力學模型的移動機器人軌跡跟蹤控制法,運動學模型下的控制屬于理想型,但在現實操作中,系統往往會受到各種不確定干擾,為此,采用了反演滑模軌跡跟蹤控制法,可實現精準自主定位導航。
2 自主導航圖書館取書機器人結構
基于視覺檢測的自主導航圖書館取書機器人是無人駕駛的,主機板采用高性能的人工智能RK3399PRO 板,具有六核(雙核 Cortex-A72+四核 Cortex-A53)的微處理器;采用了雙目視頻檢測、激光雷達定位、配備SLAM 自主定位導航系統、多傳感器信息融合(激光雷達、陀螺儀、里程計等多種傳感器);具備在復雜環境下精準定位、多傳感器數據融合、動態智能路徑規劃、手動/自動建圖、導航避障、自主導航等功能特點。系統可應用于圖像識別、智能駕駛、智能網聯、無人系統、智能機器人與群體智能操作等。
3 圖書館取書機器人關鍵技術
3.1 視覺識別技術
基于視覺檢測的自主導航圖書館取書機器人,由于圖書背脊大多狹窄,選用了一維碼,用于圖書的條碼識別。取書機器人使用視覺識別進行路障的規避,在通過借閱人得到讀取圖書固有位置信息后,將定位圖書所在位置,然后計算優先路線,自動規避障礙前往圖書所在位置,最后機械臂的雙目攝像頭通過卷積神經網絡算法獲取識別圖像特征,避免煩瑣的圖像預處理、特征提取的過程,并對目標圖像進行檢測和相應的處理。之后通過雙目攝像機掃描定位標簽所在的位置,最后機器人通過控制機械臂實現目標書籍的抓取。
3.2 取書機器人自主導航定位技術
自動取書機器人的導航定位技術,由其底座搬運機構負責,在接收到圖書借書任務時,需要準確識別自身位置,并精準到達圖書所在的書架位置,不會串位,拿到或放回圖書之后,能回到取書口或充電位置,保證下一次工作的正常運行。本導航系統采用激光雷達構建地圖各種算法構圖的同時,將網格地圖應用于自主導航系統,支持室內導航、動態避障,能夠在動態變化的非結構性環境下,完成復雜的作業任務。
3.3 取書機器人的機械結構設計
3.3.1 底盤結構設計
圖書館的書架采取的是密集布局,以最小的空間內存放最多的書,并且書架之間的間距不大,取書機器人小車要在其空間快速完成取書任務和轉向。目前常用的機器人的移動方式有輪式、履帶式和多足式。本機器人系統采用4個麥克納姆輪構成的四輪式結構,且是用4 個無刷電機獨立驅動,通過主控機控制4 個輪子的轉向和轉速來改變機器人的運行軌跡,實現底盤的橫向、縱向及任意角度的移動,還能實現繞中心原地旋轉。也能在狹小空間內實現系統平穩、快速的全方位移動,提高圖書館空間利用率。
3.3.2 機械臂設計
機械手部分由拾取手臂和夾持裝置共同構成。為了完成取書過程,拾取手臂的設計中最常用的機械臂結構有關節型球面坐標型、球面坐標型、柱面坐標型和直角坐標型。在圖書館自動取書機器人的設計中,按關節型球面坐標型設計機械臂。
3.3.3 搬運機構設計
自動取書機器人的設計理念在于高靈活性,故而在使用搬運設備時,軟件的設計和搭載的相關硬件設施都體現了高靈活性,可動態實時躲避障礙,以激光雷達結合多種算法進行網格式地圖輸出。故而,選用輪胎時也需要具備這種特性,本機器人選用了麥克納姆輪。
使用這種輪子在平地上具有很高的工作效率可以橫向、縱向、任意方向的旋轉,并且在工作時,可以使機器人更正自己的狀態和位置,在圖書館這種環境中具有較大的優勢,保證了圖書館取書機器人工作的高效率與精確性。
4 自動取書機器人的軟件
圖書館取書機器人的設計要求是圖書館自動取書機器人是以機器人完成獨立的取書、存放、檢索識別等工作,讀者在控制區對自動取書機器人輸入需要取的書的書名,然后取書機器人將根據指令獨自完成取書、定位、存取等整個取書環節。
圖書館取書機器人分為兩大難點,其一是取書夾持器工作過程,其二是自動定位系統。
4.1 運動控制
激光雷達建立圖書館環境地圖采用較為常用的2D SLAM 算法Gmapping。在自主導航過程中,為了實現在地圖坐標系上對圖書館的藏書架上的圖書精準定位采用了蒙特卡洛定位算法,使用機器人操作系統(ROS:Robot operating system)中的激光掃描匹配器(laser_scan_matcher)功能包來完成激光雷達的前后數據幀的比對,從而獲得激光雷達位置變化數據的估計;由于激光雷達固定在機器人的前面,因此,激光雷達固定和機器人兩者是簡單的平移,由此可得到機器人的里程信息數據。這樣就能推導出地圖坐標系(Map Coordinate System)、里程計坐標系(Odometer Coordinate System)和機器人坐標系(Robot Coordinate System)這3 種坐標之間的轉換關系,通過坐標變換樹tf(coordinate transformation tree)統一發布相應的話題(topic)[3]。
基于視覺檢測的自主導航圖書館取書機器人的軟件主要算法:
(1)IMU9 軸AHRS Madowick 姿態算法;
(2)擴展卡爾曼濾波多傳感姿態融合算法;
(3)激光雷達構建地圖,支持gmapping、hector、karto、google Cartographer 等算法構圖,構建過程支持鍵盤控制,其中google Cartographer 算法轉換成網格地圖并用于自主導航功能;
(4)支持室內自動導航、動態避障、AMCL 室內定位功能;
(5)支持OpenCV的常用邊緣檢測、物體檢測與識別等;
(6)支持人臉識別、眼睛識別、人體識別、動物識別、姿態識別等功能;
(7)具備深度攝像頭的視覺構建地圖及導航功能,支持自動跟隨;
(8)支持Android 手機的建圖、手機導航及圖像傳輸;
(9)支持語音識別控制;
(10)支持開機自啟動。
4.2 圖書的識別與取書
為了精準找到書架上的圖書,需對書上的條碼識別。圖書識別采用條碼識別的方法進行識別,在條碼識別過程中主要是通過相應函數對圖書條碼的輪廓特征進行識別,在識別辨識到條碼輪廓之后,利用zabr 工具包對所找出條碼進行解碼,從而得出條碼所代表的標號進行檢索出代表內容。再由機器人的主控機控制機械臂對圖書進行夾取。
4.2.1 圖書索書號識別
在圖書館中要獲得圖書的相關信息,通過識別圖書的標簽即圖書索書號即可實現。圖書標簽中的圖書索書號是圖書館中圖書的唯一標識碼,《中國圖書分類法》規定,其索書號格式為:索書號=分類號+書次號+輔助區分號。圖書索書號是貼在圖書側面下方,可利用取書機器人的機械臂上的雙目攝像頭拍攝圖書側的圖[4],獲取圖像經預處理、濾波去噪、顏色的特征提取、書脊邊緣的檢測、圖像字符分割、匹配和識別索書號取書。具體流程如圖1所示。
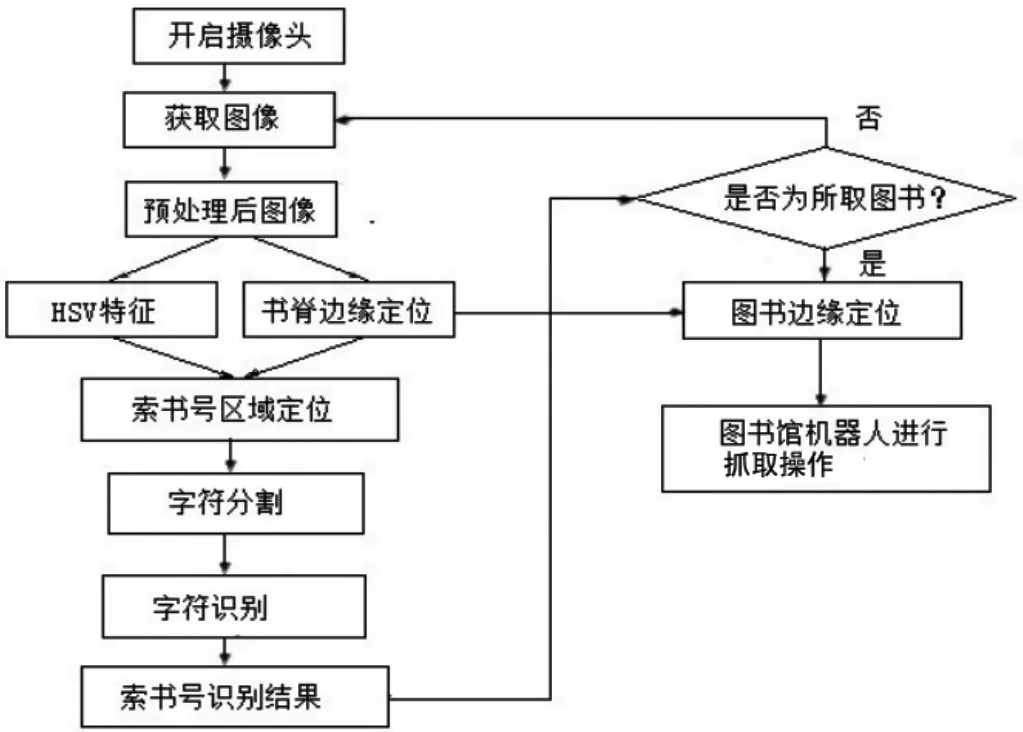
圖1 識別圖書索書號的流程
4.2.2 圖書索書號識別算法
圖書館取書機器人機械臂上的雙目攝像頭對書脊邊緣精確檢測、取書的精準定位的關鍵取決于書脊邊緣檢測算法,本系統采用了改進型Canny 邊緣算子作為書脊的邊緣檢測[5]。采用如下步驟處理:
(1)索書號視頻拍攝圖像的預處理:濾波去噪。
(2)確定HSV 顏色空間的色調(Hue)、色飽和度(Saturation 或Chroma)和亮度 (Intensity 或Brightness)的取值范圍。
其改進型的Canny 算子邊緣檢測算法如下:
(1)傳統的高斯濾波

式中,每個類yi的屬性xi的對應的平均值和方差分別為μi和σi。
(2)輸出像素
根據鄰域像素的值的加權組合輸出像素。

(3)求出權重系數w(i,j,k,l),其值取決于定義域核和值域核的乘積。
定義域核和值域核的乘積的求解方法如下:
定義域核

值域核

定義域核和值域核的乘積,即為權重系數w(i,j,k,l),如下:

上式可算出尺空間域在像素域的權重值,作進一步的模板歸一化,再作卷積處理。
(4)梯度強度與方向計算
在Canny 算法中用了四個算子來檢測圖像中的水平、垂直和對角邊緣。邊緣檢測的算子對像素水平Sx、垂直Sy求一階或二階導數,可確定像素點的梯度強度S和方向θ。梯度強度S與方向θ的計算公式如下:

對于X和Y方向的soble 算子分別如下:

對于方向45°和方向135°的算子分別如下:

其改進型的模板比傳統的模板更方便更精準。以上是對于X、Y、45°、135°方向進行計算。
(5)自適應雙閾值處理
對于噪聲和顏色的變化可能引起邊緣像素的變化,針對這種情況可采用雙閾值進行邊緣像素的過濾,即弱梯度值過濾邊緣像素,若邊緣像素的梯度值小于低閾值,則會被抑制;保留高梯度值的邊緣像素。雙閾值可通過OTSU最大類間方差的求得,但算出的閾值并不適應所有的圖像。因此,可采取滾動條形式在求得的自適應雙閾值的基礎上作出微調處理,以其閾值達到最佳的效果。
例如:選取系數TH 和TL,比率為2:1 或3:1。(一般取TH=0.3 或0.2,TL=0.1);
將小于低閾值的點拋棄,賦0;將大于高閾值的點立即標記(這些點為確定邊緣點),賦1 或255;
將小于高閾值,大于低閾值的點使用8 連通區域確定(即:只有與TH 像素連接時才會被接受,成為邊緣點,賦1 或255)。
(6)非極大值抑制處理
圖像梯度幅值矩陣中的元素值越大,說明圖像中該點的梯度值越大,但并不能說明該點就是邊緣(僅作為圖像增強的過程)。在Canny 算法中,非極大值抑制是進行邊緣檢測的重要步驟,通常是指尋找像素點局部最大值,將非極大值點所對應的灰度值置為0,這樣可以剔除掉一大部分非邊緣的點。
(7)邊緣鏈接
邊緣鏈接采用DFS 深度優先搜索。其大于高閾值的為真實邊緣;小于低閾值就丟棄,在非極大值抑制已經丟棄一部分;介于高低閾值之間相當于偽邊緣。這部分偽邊緣就是要操作的部分。
通過上述改進型Canny邊緣算子可實現書脊的邊緣檢測。
5 結語
本文針對圖書館的管理和操作流程、圖書館取書機器人的功能需求和技術需求,設計了一款基于視頻檢測的自主導航圖書館取書機器人,該智能取書機器人采用了高性能的人工智能開發板、雙目視頻檢測、激光雷達定位、配備SLAM 自主定位導航系統、多傳感器信息融合(激光雷達、陀螺儀、里程計等多種傳感器);能夠實現在復雜環境下精準定位、多傳感器數據融合、動態智能路徑規劃、手動/自動建圖、導航避障、自主導航等功能。智能取書機器人可提高圖書館的工作效率,減輕圖書管理人員的勞動強度和工作量,對智能圖書館建設有參考價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
文苑(2019年20期)2019-11-16 08:52:12
文苑(2018年17期)2018-11-09 01:29:40
小太陽畫報(2018年1期)2018-05-14 17:19:25
少年博覽·小學低年級(2016年10期)2016-11-24 06:48:23
海峽科技與產業(2016年3期)2016-05-17 04:32:12