深度學習在雷達目標檢測中的應用綜述
2023-01-09 09:01:06施端陽張馨予
雷達科學與技術 2022年6期
施端陽, 林 強, 胡 冰, 張馨予
(1. 空軍預警學院, 湖北武漢430019; 2. 中國人民解放軍95174部隊, 湖北武漢 430040; 3. 中國人民解放軍63650部隊, 新疆和碩 841700)
0 引 言
目標檢測作為雷達的基本功能之一,是雷達目標跟蹤和目標識別的前提,其檢測性能的好壞決定了雷達探測能力的高低。雷達接收的回波中,既有目標,也有雜波和噪聲等干擾信號。雷達目標檢測技術的本質是在噪聲和雜波條件下對目標存在與否的判決問題和目標的定位問題。目標定位問題可以通過測量回波信號的延遲時間和雷達天線的方向性予以解決。判決問題是當前雷達目標檢測面臨的主要挑戰。
早期的雷達大多采用非相參體制,沒有專門的信號處理設備,目標檢測功能是在雷達顯示器上,通過人工觀測回波幅度的高低來實現。雖然人工檢測方法在目前許多雷達中仍有使用,但人工觀測無法適應長時間的工作和大批量目標的處理。因此,需要雷達具備目標自動檢測功能。雷達目標自動檢測技術根據檢測門限和判決準則判斷是否存在目標。雷達目標自動檢測的理論基礎是統計檢測理論。實際上,雷達回波信號的統計特性無法預知,導致檢測門限難以確定。檢測門限過高會造成漏警,檢測門限過低會導致虛警。為了解決這個問題,恒虛警率(Constant False Alarm Rate,CFAR)檢測技術[1]應運而生。但傳統的CFAR檢測技術主要通過回波能量實現目標檢測,由于可用于參考的單元環境有限,易受到資源的限制,對于微弱目標易造成漏警[2]。
近年來,深度學習技術在光學圖像處理領域的應用發展迅速,尤其在目標檢測[3]、圖像分類[4]和圖像分割[5]等方面成果顯著。由于雷達技術的進步,雷達分辨率逐漸提升,不同形式的雷達圖像數據的質量越來越好。雖然雷達圖像信息量比光學圖像嚴重不足,在成像機理、目標特性、分辨率等方面存在差異,但深度學習強大的圖像特征自動提取能力,為雷達目標檢測技術提供了一種新的思路。在圖像層面上,可將雷達目標檢測視為一項計算機視覺任務,在圖像中將目標與背景進行區分,并對每個目標進行精準定位和分類標簽預測,從而實現雷達目標檢測功能。
1 雷達目標檢測研究現狀
雷達目標檢測技術受裝備擔負的使命任務和作戰環境的影響[6]。目前的研究成果主要集中在利用天波超視距雷達和合成孔徑雷達檢測艦船目標[7-8]、探地雷達檢測地下目標[9]、機載雷達檢測高速運動目標[10]、穿墻雷達檢測人體目標[11]、多輸入多輸出(Multiple Input Multiple Output,MIMO)雷達檢測微弱目標[12]和無源雷達檢測海面目標[13]等方面。雖然目標檢測技術運用的雷達裝備不同,檢測對象各異,但其本質內容主要包括兩個方面:一是目標信號是否存在的判決;二是檢測時虛警概率的控制。
目標信號是否存在的判決問題可從多個角度來理解。在統計學上,可認為是典型的統計判決問題;在模式分類上,可視為一個二分類問題。前者根據回波信號的先驗統計知識判斷有無目標存在,后者根據目標和干擾在變換域上的特征差異對回波進行分類,以區分目標和干擾。因此,雷達目標檢測方法可分為基于統計特性的方法和基于特征的方法,如圖1所示。

圖1 雷達目標檢測方法
虛警概率控制主要通過CFAR檢測技術來實現。CFAR檢測的門限根據被檢測點的噪聲、雜波等干擾的大小動態調整,在保持虛警概率不變的情況下使檢測概率達到最大。
1.1 傳統雷達目標檢測方法
傳統雷達目標檢測方法主要是基于統計特性的方法,可分為似然比檢測(Likelihood Ratio Test,LRT)技術、檢測前跟蹤(Track Before Detect,TBD)技術和恒虛警率檢測技術。
1.1.1 似然比檢測技術
似然比檢測是基于統計特性的檢測方法中最基礎的檢測理論,目前主要對其改進技術進行研究。針對目標機動過程中系統輸入值未知時,標準廣義似然比(Generalized Likelihood Ratio,GLR)檢測器虛警概率降低的問題,提出了魯棒性更強的自適應H0-GLR檢測器。針對機載雷達在干擾環境下的多通道檢測問題,提出了一步和兩步GLR檢測器。隨后,頻域平均似然比檢測器和波束域變換廣義似然比檢測器相繼被提出,前者證實了頻率分集可以提高檢測能力,后者在強干擾條件下仍具有很好的檢測性能。為了減少對數據的依賴,催生了自適應全對稱檢測器和降維GLR檢測器的發展。
此外,似然比檢測技術還廣泛應用于無源雷達和MIMO雷達。利用數字視頻廣播和氣象監視雷達作為輻射源的低復雜度GLR檢測器,在不降低多普勒分辨率的同時具有較好的檢測性能。基于粒子濾波的LRT方法和GLR檢測器,檢測性能均優于傳統MIMO雷達目標檢測方法。
1.1.2 檢測前跟蹤技術
檢測前跟蹤技術是將連續的多幀數據進行能量積累后與門限進行判決,實現目標檢測,再通過航跡回溯,實現目標跟蹤。TBD同時利用了單次掃描脈沖串積累和多次掃描間積累,對微弱目標具有較好的檢測能力。典型的TBD原理框圖如圖2所示。信號處理進行雜波抑制和脈沖串積累。預處理不是必需的步驟,因此用虛線表示,其作用是減少后續需要處理的數據量。跟蹤并積累實現在跟蹤的同時進行掃描間積累,以獲得目標假設航跡。當通過跟蹤能夠得到合理的航跡,且目標函數超過檢測門限時,檢測處理做出目標存在的判決并輸出目標航跡。TBD的核心是目標航跡跟蹤,按照航跡跟蹤方法可分為批處理檢測跟蹤方法和遞歸檢測跟蹤方法兩類。前者以動態規劃(Dynamic Programming,DP)算法和霍夫變換(Hough Transform,HT)算法為代表,后者以粒子濾波(Particle Filter,PF)算法[14-15]、三維匹配濾波(Three Dimensional Matched Filtering,3DMF)算法[16]和級假設檢驗(Multilevel Hypothesis Testing,MHT)算法[17]為代表。

圖2 典型TBD原理框圖
在傳統TBD方法的改進上,劉紅亮等[18]充分利用跟蹤信息設計了預測波門內的多幀聯合檢測方法,提高了檢測性能和跟蹤維持性能。張奕群等[19]將噪聲引入直方圖概率多假設跟蹤算法中,對多目標在低信噪比時具有更好的跟蹤檢測能力。
1.1.3 恒虛警率檢測技術
恒虛警率檢測技術按背景環境分為雜波中的CFAR檢測和噪聲中的CFAR檢測,分別對應背景快起伏和慢起伏兩種狀態。雜波的統計特性比噪聲的更復雜。因此,目前的研究對象主要是雜波中的CFAR檢測。雜波中的CFAR檢測技術按數據幀數可分為基于單幀的參量型CFAR檢測、非參量型CFAR檢測和基于多幀的雜波圖檢測。
參量型CFAR檢測主要用于雜波分布模型已知的情形,具體可分為通用參量型CFAR和專用參量型CFAR。常規雷達分辨率較低,在CFAR檢測時假設背景雜波服從瑞利分布,一般采用通用參量CFAR。針對均勻雜波提出了單元平均恒虛警(Cell Averaging,CA-CFAR)檢測算法。針對非均勻雜波提出了選大恒虛警(Greatest of,GO-CFAR)和選小恒虛警(Smallest of,SO-CFAR)檢測算法。針對多目標場景提出了有序統計恒虛警率(Ordered Statistics,OS-CFAR)檢測算法。文獻[20]對上述四種通用參量CFAR檢測算法的優缺點進行了對比分析,為實際應用提供了指導。高分辨率雷達的雜波幅度概率分布更為復雜,常假設其服從Weibull分布、Log-Normal分布和K分布等非瑞利分布。文獻[21-23]針對通用參量CFAR檢測算法在非瑞利分布時虛警概率顯著增高的問題,先后提出了zlog(z)-CFAR、WL-CFAR(Weighted Likelihood-CFAR)和WHWH-CFAR(Weber Haykin Weber Haykin-CFAR)等專用參量CFAR檢測算法。然而當雜波分布與假設的雜波模型不一致時,參量型CFAR檢測器的性能會降低,此時需要用到非參量型CFAR檢測技術。
非參量型CFAR檢測處理將雜波數據轉換為一個檢測統計量后,與門限進行比較,判斷目標是否存在。其檢測性能不受雜波分布模型的影響,適用于模型未知的情況。但由于未充分利用雜波信息,恒虛警損失較大,特別是在較小的脈沖積累數時尤為嚴重,其檢測性能通常低于參量型CFAR,一般應慎用。
基于單幀的CFAR檢測算法對于空域上雜波強度變化劇烈,均勻性寬度較窄的地雜波,會隨著參考單元數量減少導致恒虛警損失急劇增大。雜波圖CFAR檢測技術在時間上對多幀回波數據進行采樣,估算雜波背景強度,形成雜波圖,適用于地雜波中的恒虛警率檢測。
1.2 現代雷達目標檢測方法
現代雷達的空間分辨率和多普勒分辨率顯著提升,回波信號更加復雜,承載的信息量更多。回波信號的復雜性導致對其統計建模的難度增加,傳統的基于統計特性的檢測方法應用受限。但回波信號中包含的豐富信息為基于特征的檢測技術提供了有利條件。特征檢測方法從模式分類的角度出發,提取回波信息中有用的特征,利用目標和干擾的特征差異性對兩者予以區分,實現目標檢測功能。特征檢測技術的原理框圖如圖3所示,主要包括預處理、特征提取、分類器和檢測判決四個部分。

圖3 特征檢測原理框圖
預處理將回波信號由觀測空間轉換到特征空間,在特征空間中,目標和干擾在某個或某些特征上具有差異性。特征提取用于壓縮預處理后的冗余信息,降低數據維度,并提取能夠區分目標和干擾的特征。分類器根據提取的特征構建分類模型實現對目標和干擾的區分。檢測判決依據分類結果,進行判決輸出。在雷達目標檢測中,為了提高檢測性能,必須增加目標和干擾的可分性,即選擇差異性較大的特征,構建區分度較高的分類模型。
1.2.1 檢測特征的研究進展
早期的特征檢測方法多采用單特征進行檢測。但隨著特征數量增加,單特征檢測在性能上會有一定的損失,多特征聯合檢測是未來的研究方向。具有代表性的特征是分形特征、混沌特征、時頻域特征以及極化特征等,如表1所示。

表1 特征檢測方法的檢測特征
1) 分形特征
Lo等[24]提出了基于單一分形維數的目標檢測方法,開啟了分形理論在雷達目標檢測應用的先河。2006年,Hu等[25]基于多重分形理論,通過計算Hurst指數,對海雜波具有較好的檢測效果。2009年,李寶等[26]發現海雜波在分數階傅里葉變換域滿足分形特性,并通過分數維差異最大值檢測目標,在低信雜比下達到了較好的檢測性能。隨著分形理論的發展,頻域的分形特性和AR(Auto Regressive)譜的分形特性也被引入目標檢測中,均取得了良好的檢測性能。
2) 混沌特征
1995年,Haykin教授首次提出了雷達海雜波具有混沌特性,并利用關聯維數、Kolmogorov熵和Lyapunov指數等特征構建預測模型實現目標檢測。何伍福等[27]利用IPIX雷達的實測數據,通過不同的預測模型,驗證了基于混沌特征的目標檢測算法的可行性。曾麗萍等[28]總結了近年來基于混沌預測的雷達目標檢測方法的研究進展。唐建軍等[29]近期的研究成果表明,在不破壞海雜波混沌特性的前提下,采用改進的蝙蝠算法優化混沌預測模型,可改善噪聲的影響,提高檢測效率。
3) 時域、頻域特征
在時域和頻域特征方面,戴舜等[30]在研究脈沖超寬帶生命信號模型的基礎上,以描述信號時間尺度的固有模態函數為特征,檢測生命信號是否存在。劉勁等分析海雜波多普勒譜特性后,提出基于多普勒波形熵特征的檢測算法。尹輝等[31]根據目標形狀先驗知識,提出以圓周剖面亮度曲線的中心頻率為特征的飛機目標檢測方法。陳世超等[32]根據目標和雜波多普勒譜的差異性,提出基于多普勒譜非廣延熵的小目標檢測方法。姜勁等通過相對多普勒熵、相對多普勒偏移和相對多普勒峰高等特征,構造了特征檢測器。
4) 極化特征
在極化特征方面,Migliaccio等[33]在SAR(Synthetic Aperture Radar)雷達圖像中提取極化熵、極化各向異性參數和平均散射角等三個特征,對海面溢油進行檢測。Zhang等[34]對四極化SAR圖像的特征進行分析后,提出基于一致性參數特征對墨西哥灣的浮油進行檢測的方法。Shirvany[35]和Nunziata[36]先后利用SAR圖像中的極化度特征,對海面溢油進行了檢測。
5) 多特征聯合檢測
在多特征聯合檢測的研究方面,Shui等[37]將時域的相對平均幅度特征和頻域的相對多普勒峰高和相對多普勒譜熵特征進行聯合,開發出基于三特征融合的檢測算法。時艷玲等[38]提取回波的平均功率和多普勒譜熵兩個特征,提出基于非加性模型的特征聯合檢測方法。陳澤宗等[39]提取頻域峭度、多普勒峰值、熵值三維特征,提出特征聯合檢測小目標算法。近兩年,多域融合的特征數量逐漸增多。韓萍等[40]提出了將環境特征與散射特性進行融合的目標檢測方法。夏鄂等[41]在時域和多普勒域提取基于全極化信息的六維特征,通過IPIX雷達數據集驗證了六特征融合檢測算法的檢測效果。盧建等[42]從時域、頻域和極化域提取八維特征,采用主成分分析法進行特征融合,提升了海面小目標的檢測性能。羅彬珅等[43]基于時域、頻域、小波域和雙譜域提取47維特征,采用堆疊自編碼器實現特征融合,構建了雷達新型干擾識別檢測模型。
1.2.2 分類算法的研究進展
如圖3所示,特征提取后,需要構建分類器對目標和干擾進行區分。分類算法主要有凸包學習、決策樹、支持向量機和淺層神經網絡等。
文獻[38]提取兩維特征進行零均值去相關處理生成歸一化向量,運用凸包學習算法對漂浮小目標進行檢測,達到了較好的檢測效果。但凸包學習算法對于三維以上特征空間的計算復雜性增加,檢測難度大。針對凸包學習算法的維數限制,文獻[44-46]先后提出了基于決策樹、支持向量機和K近鄰的檢測算法。上述算法是有監督的學習算法,過渡依賴于帶標簽的回波數據進行訓練,靈活性較弱。文獻[47]提出了一種半監督的基于標簽傳播的檢測算法,只需要雜波數據集進行訓練,適用性更強。針對樣本規模不均衡等異常數據的情況,文獻[48-49]先后利用最小最大概率機和支撐向量域描述兩種單類分類器對機場跑道異物進行分層檢測,獲得了較好的檢測性能。2020年,文獻[50]將K-means聚類和單類支持向量機結合,設計了一種新的LOCSVM(Localized One Class Support Vector Machine)單類分類器,提高了短時觀測下的檢測性能。在無監督算法方面,文獻[42]提出了基于孤立森林的檢測算法,為海面小目標的異常檢測提供了一種思路。
1943年,神經元模型誕生。20世紀90年代,計算機技術的進步促進了神經網絡的應用。在模式分類領域,人工神經網絡比其他人工智能技術具有更好的性能。文獻[51-56]分別提出了基于六種神經網絡的雷達目標檢測方法。由于網絡結構的輸入層節點數沒有限制,所以神經網絡分類器可容納的輸入特征維數更多,檢測結果更好。另外其檢測速度得到了大幅提升,更加適應雷達目標實時檢測的需求。
基于特征的目標檢測技術,其分類結果的準確性很大程度上取決于輸入特征的質量和分類器的魯棒性。無論是凸包學習算法,還是決策樹、支持向量機和淺層神經網絡等機器學習算法,都無法回避特征提取的問題。上述算法中,大多數的輸入特征都需要專家人工分析鑒別,從合適的特征域中選取差異性大的特征。隨著雷達回波數據量和特征融合維數的增加,人工特征提取需要消耗大量的精力,工作效率較低。
2 深度學習目標檢測算法
深度學習是一種深層神經網絡,其利用多個隱含層對輸入數據的特征進行學習,通過對目標和背景進行分類,實現目標檢測功能。從本質上講,深度學習目標檢測方法是一種特征檢測方法,也屬于現代雷達目標檢測方法。與機器學習方法相比,深度學習方法具有特征自動提取、分類準確度高、魯棒性和泛化性強等優勢。
2010年,斯坦福大學的李飛飛教授通過其團隊制作的ImageNet圖像數據庫,開始主導ILSVRC競賽。該比賽前兩屆的圖像分類項目均采用了機器學習的方法。2012年,Hinton等構建的AlexNet模型將分類的準確率提高了9.4%,一舉獲得冠軍,首次展示了深度學習技術的巨大潛能。2014年,Girshick等率先將R-CNN(Regions with Convolutional Neural Networks Features)模型應用到目標檢測中,使深度學習目標檢測算法得到了飛速發展。深度學習目標檢測算法原理框圖如圖4所示,按檢測原理劃分成基于區域建議和基于回歸兩類。

圖4 深度學習目標檢測原理框圖
2.1 基于區域建議的目標檢測算法
基于區域建議的目標檢測算法先通過選擇性搜索方法確定候選區域,再使用深度學習方法對該區域進行特征提取和分類,檢測流程需要兩步,因此也稱為兩階段檢測算法。常見的算法有R-CNN、SPP-Net(Spatial Pyramid Pooling Network)[57]、Fast R-CNN[58]、Faster R-CNN[59]、R-FCN(Region-based Fully Convolutional Networks)[60]和FPN(Feature Pyramid Networks)[61]等。
R-CNN采用選擇性搜索(selective search)的建議框提取方法,在圖像中選取2 000個左右的建議框,將所有建議框調整為同一尺寸的圖像,再輸入到CNN模型中提取特征得到特征圖,然后對每個類別使用SVM分類器對所有特征向量進行打分,得到所有建議框對應于每個類別的得分。隨后,在每個類別上獨立地對建議框使用貪心的非極大值抑制方法進行篩選,去掉IoU(Intersection over Union)大于特定閾值的分類打分較低的建議框,并采用邊界回歸方法對建議框的位置和大小進行微調,提高定位的準確性。R-CNN檢測流程如圖5所示。R-CNN雖然極大地提高了檢測性能,但是在進行特征提取時,有2 000個左右的建議框需要進行大量重復的卷積計算,導致檢測速度極慢。另外,CNN模型要求輸入圖像的尺寸固定,由于建議框的尺寸各異,在對其調整到固定尺寸時需要進行縮放、拉伸和裁剪等操作,會導致原圖像出現不同程度的失真。
2014年,何凱明等提出了SPP-Net。該網絡在產生建議框后只對原圖進行一次全圖特征提取,得到整幅圖像的特征圖,避免了卷積特征的重復計算,提高了算法的速度。SPP-Net引入了空間金字塔池化層,其將不同尺寸的輸入固定為同一個尺寸的輸出,解決了R-CNN需要調整建議框尺寸的問題,提升了網絡的檢測性能。SPP-Net檢測流程如圖6所示。SPP-Net雖然提高了檢測速度,但訓練仍然是多階段的。SPP-Net僅微調了全連接層,未調整之前的所有層。微調不能在SPP層之前更新卷積層,影響了網絡精度。
2015年,Girshick在R-CNN的基礎上,設計了Fast R-CNN。后者開發了流線型的訓練過程,能夠同時訓練Softmax分類器和邊界框回歸器。同時,其吸收了SPP-Net的思想,采用與SPP層類似的ROI(Region of Interest)池化層,為每個建議框提取長度固定的特征向量。這些特征向量輸入到全連接層后,分為兩個輸出層,分別用于確定目標類別預測的Softmax概率和區域細化的特定類邊界框回歸偏移量。Fast R-CNN檢測流程如圖7所示。雖然Fast R-CNN結合了R-CNN和SPP-Net的優點,加快了檢測過程,但其仍受到提案檢測[62]的影響,檢測速度受限。

圖5 R-CNN檢測流程

圖6 SPP-Net檢測流程

圖7 Fast R-CNN檢測流程
2015年,Ren、He和Girshick等又提出了Faster R-CNN。由于CNN在卷積層中比在全連接層中有很好的目標定位能力,因此可用CNN代替選擇性搜索。Faster R-CNN引入候選區域網絡(Region Proposal Network,RPN),將提取目標建議框的步驟融入到深度網絡中,直接產生候選區域,檢測速度大幅提高。Faster R-CNN檢測流程如圖8所示。雖然Faster R-CNN突破了Fast R-CNN的速度瓶頸,但檢測階段仍存在冗余計算,無法實時檢測目標。
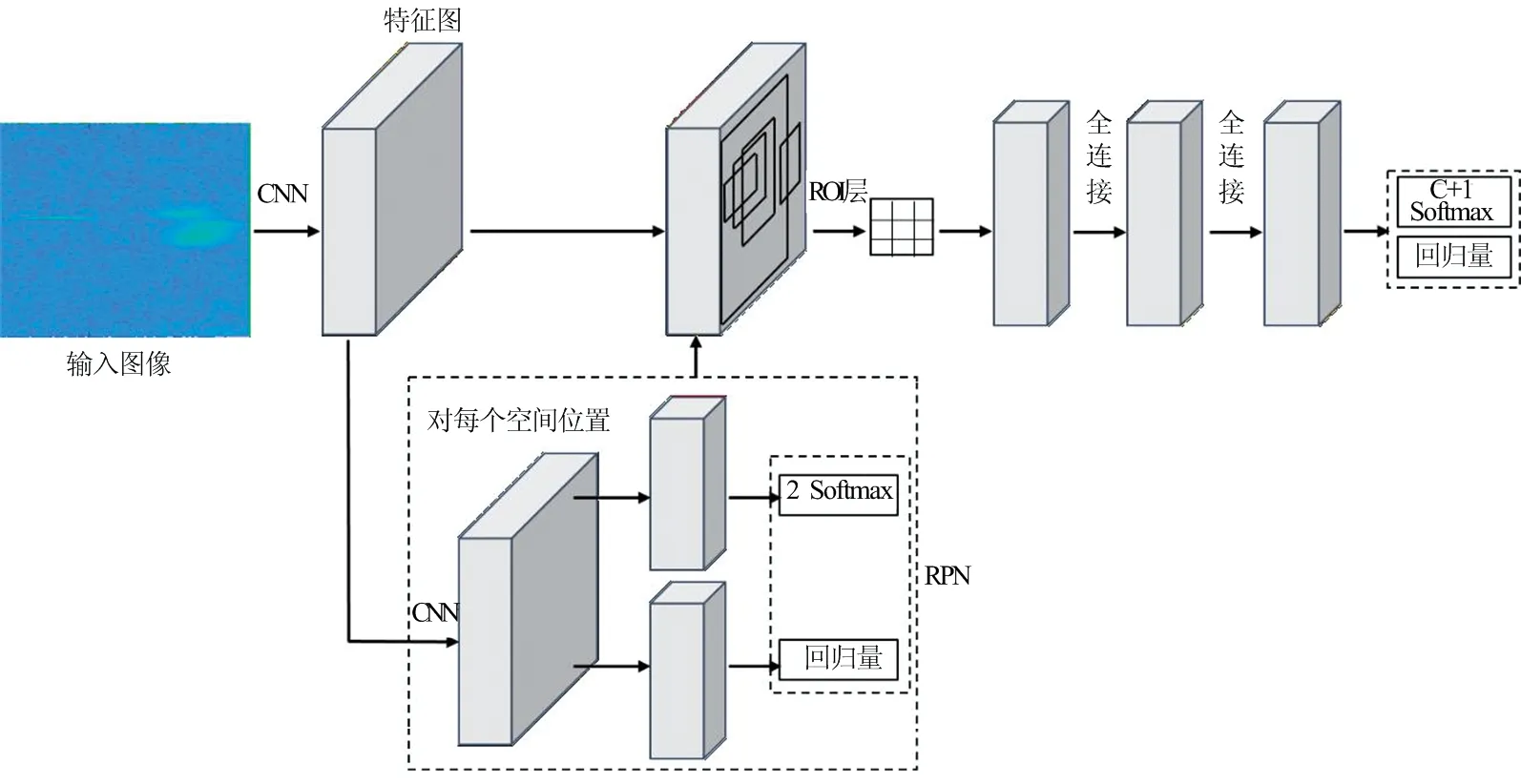
圖8 Faster R-CNN檢測流程
2016年,Dai等對Faster R-CNN進行了改進,提出了基于區域的全卷積網絡(R-FCN)。R-FCN針對Faster R-CNN對每個ROI進行大量計算的問題,提出了位置敏感分數圖,避免了圖像分類時平移不變性和目標檢測時平移可變性的沖突,實現了所有的計算在整幅圖像上共享。
2017年,Lin等對Faster R-CNN進行了改進,構建了FPN。FPN之前的大多數深度學習檢測算法對圖像底層的特征利用不充分。FPN具有橫向連接的自上而下的設計結構。CNN通過它的正向傳播,形成特征金字塔。因此FPN的預測在各特征層單獨實施,吸收了各層不同尺度的特征,可以檢測各種尺寸的目標。
2.2 基于回歸的目標檢測算法
雖然基于區域建議的目標檢測算法的檢測性能比較高,但其檢測速度無法滿足實時檢測的要求。針對此問題,研究人員提出了基于回歸的目標檢測算法。基于回歸的目標檢測算法將目標檢測視為回歸問題,沒有單獨的建議框篩選階段,而是直接回歸目標的分類概率和位置坐標,檢測過程一步到位,也稱為單階段檢測算法。此類算法采取端到端的檢測,只進行一次前饋網絡計算,檢測速度得到了大幅提高。具有代表性的算法是YOLO(You Only Look Once)[63]、SSD(Single Shot Detector)[64]、Retina-Net[65]、RFB-Net(Receptive Field Block Network)[66]、FCOS(Fully Convolutional One-Stage)[67]等。
2015年,Joseph等提出了首個單階段檢測算法YOLO。YOLO算法將原始圖像劃分成網格,每個單元格預測目標的類別概率、邊界框的位置和置信度。由于沒有建議框生成步驟,YOLO更加輕量化,檢測速度更快。但同時也導致目標位置精度降低,尤其是小目標的檢測性能顯著下降。為了解決這個問題,Joseph等又陸續提出了YOLO v2、YOLO v3、YOLO v4和YOLO v5等版本。YOLO檢測流程如圖9所示。
2015年,Liu等在借鑒了YOLO快速檢測思想和RPN的優點后,提出了SSD算法。SSD不再只使用頂層特征圖進行檢測,而是引入了多尺度特征圖的檢測策略,綜合多個卷積層的檢測結果對不同尺寸目標進行檢測。SSD檢測流程如圖10所示。

圖9 YOLO檢測流程
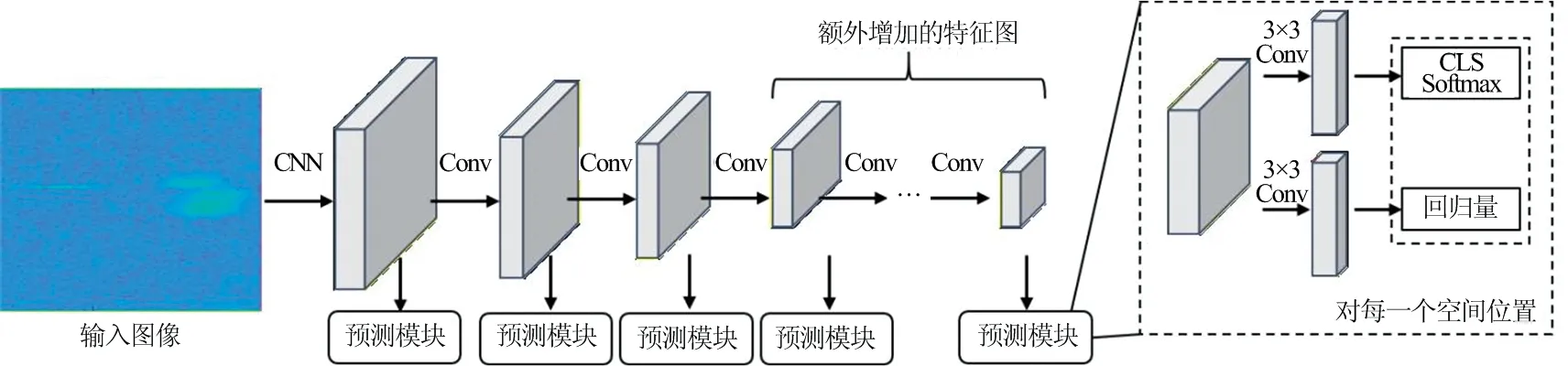
圖10 SSD檢測流程
2017年,Lin等認為單階段檢測算法精度低的原因在于檢測器訓練時存在正負樣本不平衡的現象,提出了Retina-Net算法。Retina-Net算法引入了焦點損失函數,通過對交叉熵損失加上權重,使檢測器訓練時更關注難分類的樣本。焦點損失的引入,使得單階段檢測算法既保持了速度優勢又達到了兩階段檢測的精度。Retina-Net檢測流程如圖11所示。
2018年,Liu等在SSD模型的基礎上加入感受野模塊(receptive field block)提出了RFB-Net算法。該算法采用VGG16作為特征提取網絡,被提取的特征經過RFB后產生不同尺度的特征圖,利用多尺度特征融合思想進行分類回歸,檢測精度得到進一步提高。
2019年,Tian等提出了全卷積單階段(fully convolutional one-stage)檢測算法。該算法采用逐像素點預測的思路,使用FPN多級預測和中心點預測策略增強目標檢測效果。與基于區域建議的算法和其他基于回歸的算法相比,FCOS算法無需預先設定錨框(anchor boxes),而是由模型自己回歸出來。因此,FCOS算法的設計參數和占用內存大幅減少,檢測精度得到提高。
2.3 檢測算法特點比較
上述主要算法的特點如表2所示。通過分析兩類深度學習目標檢測算法的特點可知,與單階段的基于回歸的目標檢測算法相比,兩階段的基于區域建議的目標檢測算法對輸入圖像的尺寸要求更低,但需要生成建議框,導致檢測速度更慢。
圖11 Retina-Net檢測流程
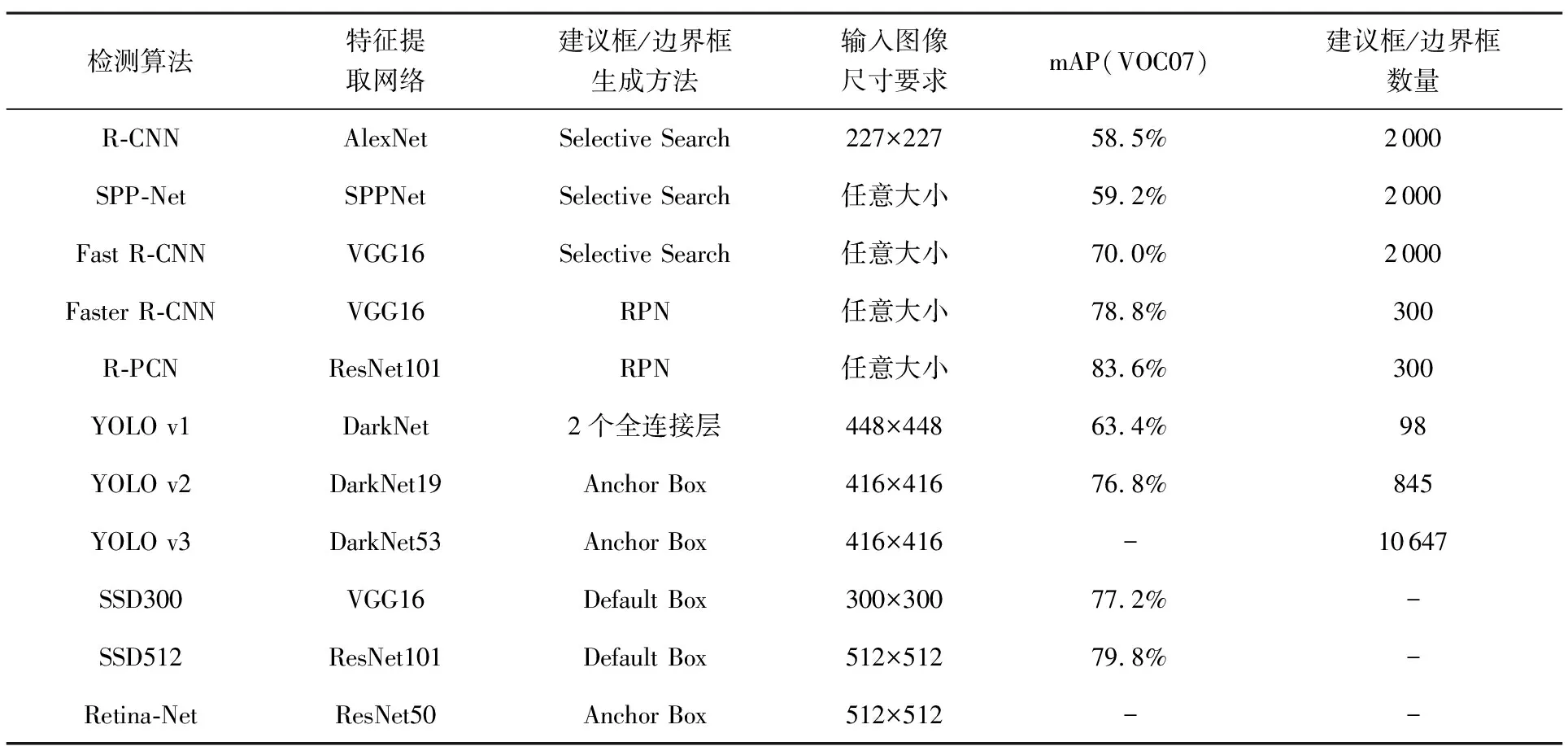
表2 目標檢測算法特點
3 深度學習雷達目標檢測應用
隨著計算機硬件處理能力和雷達分辨率的提高,基于深度學習的雷達目標檢測技術得到了廣泛應用。在應用對象上主要是高分辨雷達的一維序列數據和二維雷達圖像數據。在應用場景上主要有復雜背景下的目標檢測、弱小目標檢測和小樣本檢測。
3.1 雷達回波數據上的檢測
由于不同雷達的信號處理方法和成像原理有差別,雷達接收回波信號后可獲取不同形式的雷達回波數據,如一維的高分辨距離像(High Range Resolution Profiles,HRRP)以及二維的距離多普勒(Range-Doppler,R-D)譜圖、微多普勒(Micro-Doppler,M-D)譜圖和SAR圖像等。
3.1.1 雷達一維序列信號檢測
2019年,Liu等[68]在構建回波信號的時域回波幅度和頻域譜幅度數據集的基礎上,采用LeNet卷積神經網絡設計分類模型,對噪聲和雜波進行分類識別,為基于雷達一維序列信號在噪聲和雜波中的目標檢測奠定了良好的基礎。蘇寧遠等[69]通過建立海雜波和目標的一維距離像數據集,從預測和分類兩種角度出發,分別采用長短時記憶網絡和卷積神經網絡設計檢測模型。通過實測數據驗證了兩種方法在雷達一維序列信號中檢測目標的可行性,同時發現CNN分類方法檢測的實時性更好。
雷達回波信號在時域上可看作時間序列信號,反映了回波幅度隨時間的變化。一般情況下,目標信號比雜波信號的強度高,回波幅度大。可根據目標與雜波在回波幅度上的差異性進行目標檢測。但由于雷達一維序列信號僅利用了回波信號的幅度信息,檢測性能有限。因此,針對雷達一維序列信號采用深度學習方法進行目標檢測的研究相對較少。
3.1.2 雷達二維圖像數據檢測
相比于雷達一維序列信號,雷達二維圖像的數據來源更加豐富,研究成果更多。
1) R-D譜圖檢測
雷達回波信號在快時間域經過快速傅里葉變換后得到距離維信息,再對各距離單元進行慢時間域傅里葉變換后得到回波的R-D譜圖,即回波在距離-多普勒域的能量分布。可利用目標和干擾在R-D譜圖上的能量差異進行檢測。
Perez等[70]構建了激光雷達R-D圖像數據集,設計了YOLO v3單階段目標檢測網絡,對行人和車輛目標具有較好的檢測性能。Wang等[71]構建脈沖多普勒雷達的R-D圖像數據集,提出了一種CNN的檢測模型,對無人機目標能夠準確地檢測定位,檢測性能高于CFAR檢測方法;張暄等[72]以R-D圖像為數據集,設計了Faster R-CNN的雷達目標檢測模型,將目標檢測問題轉化為目標與背景的二分類問題,通過實驗證實了所提深度學習目標檢測算法的檢測率升高的同時,虛警率大大降低,解決了傳統CFAR檢測算法檢測率與虛警率之間的矛盾。宋海凌等[73]受到可見光數據域目標檢測方法的啟示,在雷達回波信號的R-D圖像數據集基礎上設計了特征金字塔目標檢測網絡,使得檢測模型能夠利用不同尺度的特征檢測目標,達到了較好的檢測效果。
2) M-D譜圖檢測
根據多普勒效應,目標相對于雷達做勻變速運動時,其回波信號為線性調頻信號。利用時頻分析工具將雷達回波信號變換為二維的雷達時頻圖,根據目標的微動特征在圖像中進行目標檢測。
海軍航空大學的陳小龍團隊[74]在對回波信號進行時頻分析后,建立了時頻圖數據集,先后采用LeNet、AlexNet和GoogLeNet三種卷積神經網絡模型檢測機動目標,證實了深度學習目標檢測方法的檢測效果優于傳統的動目標檢測方法和基于支持向量機的目標檢測方法。南京信息工程大學的施賽楠等[75]采用SPWVD(Smoothed Pseudo Wigner Ville Distribution)時頻分析工具將一維回波信號變換為二維時頻圖,在純雜波中加入仿真目標,克服樣本數量不均衡的難題,構建了半仿真時頻圖數據集,在GoogLeNet的Inception v3網絡中引入遷移學習模型,對海面目標進行自主檢測,消除了人工提取特征的局限性。Kim等[76]利用多普勒雷達對人、狗、馬和汽車進行探測,對獲得的雷達回波信號進行短時傅里葉變換得到時頻圖數據集,設計DCNN檢測模型對人體目標進行檢測,達到了97.6%的檢測率。
3) SAR圖像檢測
SAR作為一種主動探測式雷達,能夠獲取目標的二維圖像,且不受天氣、光照等因素的限制,可全天時、全天候監測目標[77]。近幾年,深度學習方法在SAR圖像目標檢測中得到了廣泛的關注。
2017年,Kang等[78]提出了由RPN和上下文特征檢測網絡組成的多層融合CNN,該網絡融合了深度語義特征和淺層高分辨率特征,對小型艦船具有較好的檢測性能。2018年,Jiao等[79]針對多尺度、多場景SAR艦船檢測問題,在Faster R-CNN框架下設計了密集連接多尺度神經網絡。2019年,夏勇等[80]構建了Faster R-CNN網絡模型,借鑒遷移學習思想,利用光學圖像對模型開展預訓練,保存模型參數后利用SAR圖像數據集對模型進行再訓練,通過實驗證明訓練好的模型檢測效果和速度均有可觀的改善。同年,梁懌清等[81]針對光學圖像檢測算法在SAR圖像檢測上不適用的問題,對YOLO v3進行改進,提出了SAR-YOLO-960檢測算法。將輸入圖像擴展到960×960像素,修改YOLO v3網絡結構并改進損失函數,在自制的SAR圖像數據集上檢測效果明顯增強。2020年,Zhou等[82]針對大規模網絡難以部署在現役雷達裝備的問題,提出了一種輕量級的Lira-YOLO模型,該模型參數少,結構簡單,檢測性能較好,適用于移動設備。蘇娟等[83]基于SSD算法,提出了改進單步多框檢測算法,通過遷移學習和淺層特征增強方法,提高了SAR圖像小目標的檢測性能。2021年,陳冬等[84]、李寶奇等[85]、岳冰瑩等[86]和阮晨等[87]分別對YOLO v3、SSD、Retina-Net和FCOS四種深度學習目標檢測算法進行了改進,通過SSDD數據集證實了改進后的算法具有更好的效果。
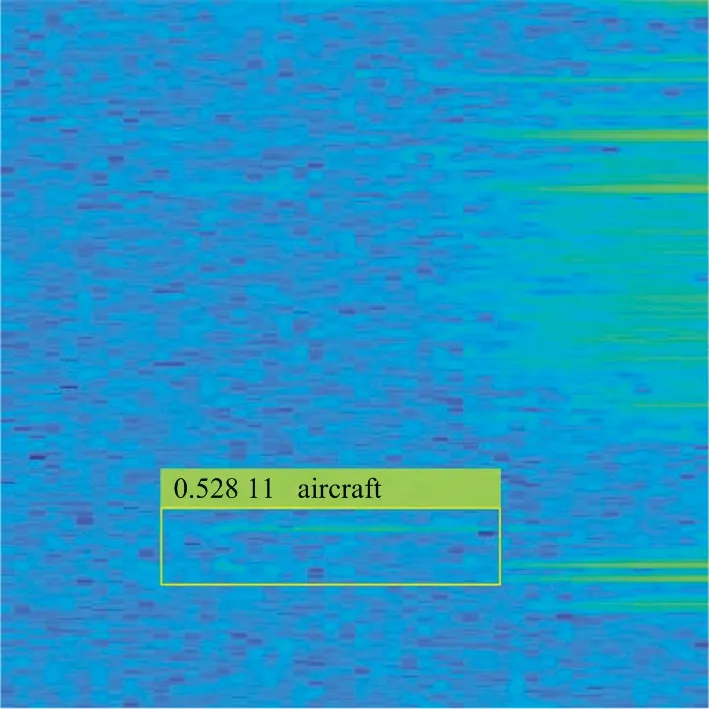
受上述研究成果的啟發,本課題組也針對雷達二維圖像開展了深度學習目標檢測的研究。利用某型航管雷達在寬帶模式下形成的方位-距離二維圖像,分別運用了基于區域建議和基于回歸的兩類深度學習算法對飛機目標進行檢測。前者以Faster R-CNN為例,后者以YOLO v3為例,兩種算法的檢測效果如圖12所示。圖12中橫向為方位向,縱向為距離向,兩種深度學習目標檢測算法均能夠準確地檢測出飛機目標的真實位置。經過統計,在該型航管雷達圖像數據制作的數據集上,Faster R-CNN算法的平均準確率為83.87%,YOLO v3算法的平均準確率為90.32%,兩者均達到了較好的目標檢測效果。但Faster R-CNN對單張圖像的檢測時間比YOLO v3高一個數量級,前者約為1.35 s,后者約為0.14 s。

(a) Faster R-CNN檢測效果

(b) YOLO v3檢測效果圖12 兩種算法檢測效果
3.2 雷達特殊場景下的檢測
隨著深度學習目標檢測技術的發展,利用大量雷達圖像數據對簡單場景下常規目標進行檢測的效果不斷提升,但針對特殊場景,如復雜背景下、弱小目標和小樣本等的檢測存在漏檢率和虛警率高的問題。主要原因是復雜背景下雜波散射強度較高、雜波背景非均勻,對面積小、散射強度弱的弱小目標檢測時會受到強雜波的干擾。另外,小樣本的數據集無法使深度學習網絡得到充分的訓練,導致檢測模型精度較低。針對特殊的應用場景下的檢測,需要采取相應的措施。
3.2.1 復雜背景下的檢測
文獻[88]針對復雜交通場景下的車輛目標檢測難題,采用Faster R-CNN目標檢測算法,通過自制數據集證實了該算法比傳統機器學習檢測方法的精度和速度顯著提升。文獻[89]針對復雜氣象條件下行人目標檢測存在漏檢和虛警的問題,首先對質量不佳的圖片采用暗通道去霧算法進行增強處理,然后在YOLO v3網絡的基礎上,加入密集連接模塊和膨脹卷積增大感受野,提出YOLO v3_dense算法,得到了更好的檢測效果。文獻[90]針對復雜背景下SAR圖像近岸艦船目標檢測效果差的問題,在YOLO v5算法中改用可變形卷積提高特征提取能力,采用級聯和并列金字塔進行特征融合,使用空洞卷積增加感受野,提出了DFF-YOLO v5(Deformable Feature Fusion-YOLO v5)算法,對近岸艦船目標數據集達到了85.99%的檢測率。文獻[91]針對復雜環境大場景SAR圖像飛機目標檢測效率低的問題,簡化了檢測流程,引入基于灰度特征的機場區域精細化提取模塊,利用YOLO v3網絡對飛機目標檢測的效率明顯提高。
本課題組利用Faster R-CNN和YOLO v3兩種深度學習雷達目標檢測方法對復雜背景下的飛機目標進行檢測,檢測時改進兩種算法的特征提取網絡從而獲得能夠區分目標和雜波的更深層次的圖像特征,檢測結果如圖13所示。圖13中,飛機目標處于雜波區附近,且目標與雜波的外形較為相似,僅憑肉眼很難區分,但改進后的深度學習目標檢測方法能夠檢測出飛機目標的真實位置,在雜波背景下同樣具有較高的檢測效果。
(a) Faster R-CNN檢測效果
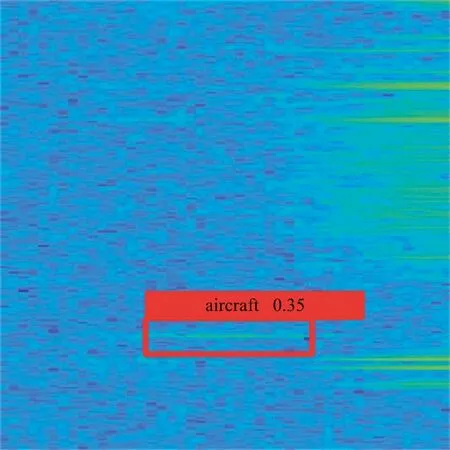
(b) YOLO v3檢測效果圖13 兩種算法復雜背景下檢測效果
3.2.2 弱小目標的檢測
文獻[92]針對機載雷達對海面小型船舶檢測效果不佳的問題,提出了基于卷積神經網絡的目標檢測方法,對小型船舶的檢測率超過90%。文獻[93]針對海雜波下小目標檢測困難的問題,在濾波器設計、數據增強和非極大值抑制方面對Tiny-YOLO v2算法進行了改進,在雷達時頻圖數據集上對小目標具有較好的檢測效果。文獻[94-95]針對SAR圖像遠海弱小目標檢測難題,分別對Faster R-CNN和SSD兩種模型的特征提取模塊進行改進,提出了改進的Faster R-CNN和特征增強的SSD算法,增強了小目標的發現能力。文獻[96]提出了有效增強感受野的輕量化檢測算法,利用ShuffleNetV2特征提取網絡減小模型尺寸,采用改進的SPP模塊增強感受野,加入SAM模塊提高目標定位能力,改進PAN(Path Aggregation Network)網絡進行特征融合,對復雜環境下的小目標具有出色的檢測性能。文獻[97]針對側掃聲吶對海底小目標檢測性能低的問題,引入特征融合模塊、融入注意力機制,采用WBF(Weighted Boxes Fusion)提升定位精度和置信度,將DETR(End-to-End Object Detection with Transformers)與YOLO v5融合,提出了DETR-YOLO的輕量型目標檢測模型,提高了小目標的檢測能力。文獻[98]為了提升無人艇對水面小目標的檢測能力,提出了改進SSD目標檢測算法,對小目標的檢測率提高了20%。

(a) Faster R-CNN檢測效果
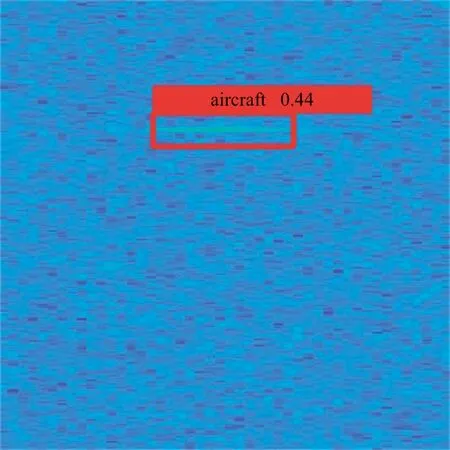
(b) YOLO v3檢測效果圖14 兩種算法對弱小目標檢測效果
本課題組采用Faster R-CNN和YOLO v3檢測航管雷達弱小目標時對算法進行改進,通過增加雷達原始圖像的放大倍數來獲得更加清晰的訓練樣本,修改兩類算法的特征提取網絡結構以便提取更深層次的圖像特征。改進后的算法對接近該型航管雷達探測威力極限的150 km處小型飛機目標仍然能夠較好地檢測出來,檢測效果如圖14所示,說明兩種深度學習雷達目標檢測方法具有較好的弱小目標檢測能力。
3.2.3 小樣本檢測
近五年,深度學習雷達目標檢測技術取得了顯著成效,產生了眾多性能優越的檢測模型,但這些模型的訓練需要大量帶有標簽的樣本。雷達實際工作時,很難獲得大規模高質量的帶標簽樣本,導致模型推廣受限。小樣本學習可在少量帶標簽樣本的情況下,使模型得到很好的訓練,降低了對樣本數據規模的要求。受小樣本學習的啟發,小樣本雷達目標檢測技術是當前的研究熱點。
文獻[99]提出了元學習算法,在模型學習到元特征后,通過少量訓練樣本可使檢測模型得到良好的泛化性能。文獻[100]在YOLO v3模型中引入元學習算法,提高了SAR圖像艦船目標小樣本檢測的性能。文獻[101]針對高頻地波雷達數據量不大的情況,采用微調的方法,先對Fast R-CNN模型進行預訓練,再微調RPN模塊,利用Faster R-CNN模型提高了小樣本檢測效果。文獻[102]針對SAR圖像訓練樣本較少的問題,基于FCN-8網絡模型,引入遷移學習方法,利用Pascal VOC數據集上訓練好的網絡參數對SAR圖像檢測模型進行訓練,在MSTAR數據集上獲得了較好的檢測性能。
本課題組采用遷移學習的思想,在運用Faster R-CNN和YOLO v3進行深度學習雷達目標檢測時,對在VOC2007數據集上已預訓練好的模型進行再訓練,在168張航管雷達圖像作為訓練樣本的情況下,達到了80%以上的平均準確率,該方法對小樣本檢測具有一定的適用性。
4 深度學習雷達目標檢測技術面臨的挑戰和發展趨勢
隨著深度學習技術的逐漸成熟,對雷達回波圖像數據進行深度學習目標檢測取得了較好的效果。但是深度學習技術也面臨著理論和工程上的挑戰。在理論方面,深度學習檢測技術的可分析性和可解釋性較差。目前,深度神經網絡中參數的確定無法進行定量的分析,只能通過實驗結果的好壞來確定,各參數的設置依據和原理尚不知曉。在工程方面,深度學習技術依賴于大量的訓練樣本和大規模的并行計算。目前,帶標簽的雷達圖像數據集的質量和數量有限,大多都是研究者自行采集、制作的數據集,通用性較差。另外,深度學習模型的訓練需要高速計算平臺,對硬件的要求較高。
為了提高檢測的可信度和效率,深度學習雷達目標檢測技術下一步的發展趨勢可以在以下幾個方面展開:
1) 弱監督或無監督目標檢測。在大數據時代,獲得含有雷達目標和干擾的圖像數據不是難事,但對圖像數據進行分類標注需要專業的人員花費大量的時間和精力,效率低下。開發輕度依賴甚至不依賴帶標簽數據的目標檢測算法非常必要,弱監督或無監督目標檢測是未來的發展趨勢。
2) 三維目標檢測。與二維的雷達圖像數據相比,三維雷達數據可展現更多的信息,提取更多的特征,更好地區分雷達目標和干擾。激光雷達點云能夠提供深度信息,將其與二維雷達圖像數據進行疊加,開展三維目標檢測是一個新的研究方向。
3) 多元特征融合檢測。機器學習目標檢測技術需要人工提取特征,特征維數通常較少。深度學習目標檢測技術可以自動提取特征。兩種特征提取方法的機理不同,提取的特征各異。可將機器學習檢測技術與深度學習檢測技術進行融合,提高特征的維度。
4) 開發新的深度學習網絡。深度學習目標檢測技術需要大量數據驅動,生成對抗網絡可以根據有限的樣本,生成大量的虛擬樣本,提高數據集的完備性,使目標檢測模型得到充分的訓練,提高泛化能力。
5 結束語
深度學習技術能夠自動提取雷達回波數據中的特征,快速準確地區分目標和干擾,在雷達目標自動檢測領域具有廣闊的應用前景。本文從統計檢測方法和特征檢測方法入手,分析了傳統雷達目標檢測方法的特點和不足,對深度學習目標檢測方法的原理進行了介紹,梳理了兩類深度學習目標檢測算法的發展歷程和特點,總結了深度學習雷達目標檢測的應用現狀,并結合雷達回波數據的特點,對未來的發展方向進行了展望。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54