機載柱形共形陣低空風切變風速估計方法
2023-01-09 09:01:10畢金枝孟凡旺
雷達科學與技術 2022年6期
李 海, 畢金枝, 孟凡旺, 鄭 蕾
(1. 中國民航大學天津市智能信號與圖像處理重點實驗室, 天津 300300; 2. 中國航空工業集團公司雷華電子技術研究所, 江蘇無錫 214063)
0 引 言
機載氣象雷達作為飛機實時感知航路氣象的重要設備,可以幫助飛機即時探測雷雨、風切變、湍流等危險天氣現象,機載氣象雷達探測技術是大氣科學研究和業務應用領域必不可少的技術基礎[1]。隨著科學技術的發展,航空安全對雷達目標探測性能提出了越來越高的要求,但由于雷達天線安裝于天線罩內,其天線孔徑受雷達罩約束,導致雷達空間分辨率難以提高。采用共形相控陣天線可以通過增大天線孔徑提高方位向分辨率[2],因此采用柱形共形陣天線有助于提高雷達的氣象目標探測性能。除此之外,隨著民航發展,航空電子設備逐漸增加,采用柱形共形陣可為機內其他設備提供更大空間,提高空間資源利用率。同時,“翼身融合”技術作為下一代民航飛機的主要設計理念[3],具有流線感的外形設計,為柱形共形陣布陣創造了有利條件。因此,機載柱形共形陣氣象雷達對于氣象目標檢測具有重要意義。
低空風切變是航空氣象領域一種極具危險的氣象目標,是指在高度600 m以下,風速和風向都發生急劇變化的一種天氣現象[4],具有變化時間短、強度大、不易檢測等特點[5]。在飛機處于起飛或者降落階段時,飛機飛行高度較低,氣象條件較為復雜,若突然遭遇低空風切變,飛行員將無法及時調整,極易造成嚴重的飛行事故。由此可見,對低空風切變的檢測和預警的研究具有較大現實意義,而低空風切變風速估計是整個檢測流程的基礎。
當機載氣象雷達探測低空風切變時,地雜波分布范圍廣、強度大的特點掩蓋了風場信號回波,因此雜波抑制是風切變檢測的基礎,其抑制效果嚴重影響著風速估計結果。機載共形陣陣列結構較為特殊,其雜波特性更為復雜,雜波抑制更加困難。目前針對共形陣雜波抑制技術解決方法有:降維空時自適應方法[6]、稀疏迭代自適應方法[7]、參數化方法[8]等,其都未利用共形陣特殊陣列流型進行數據補償估計雜波協方差矩陣。對于低空風切變檢測技術雖然也有相關文獻[9-11]報道,但其方法均是針對面陣體制提出的,針對機載共形陣體制下低空風切變風速估計還未有相關文獻研究分析。
基于此,本文提出了一種機載柱形共形陣低空風切變風速估計方法。由于共形陣的陣列流型多種多樣,本文主要分析柱形共形陣這種典型陣列。本文方法首先分析柱形共形陣列與線性陣列相比雜波抑制困難的本質原因,求得柱形共形陣列的雜波補償因子,對風場的回波信號進行補償,然后將補償后的信號利用空時最優處理器進行雜波抑制,提取每個距離單元的最大多普勒值并估計出風場速度。
1 信號模型
首先對柱形共形陣列進行分析,由于機載柱形共形陣氣象雷達設備種類多、信號處理較為復雜,通常將N個陣元在微波段按列進行合成,等效為一個二維弧陣,然后再進行分析與處理。而在進行回波模型仿真時,柱形共形陣與線性陣列在空間角頻率與天線方向圖方面有較大區別。
1.1 地雜波
如圖1所示為機載前視陣雷達模型,地面散射單元水平方位角與俯仰角為θ和φ,波束空間錐角為ψ。

圖1 機載柱形共形陣前視陣示意圖
由此可以求得柱形共形陣雜波的空間角頻率ωsc、時間角頻率ωtc:

sin-1(sinθcosφl))
(1)
(2)
式中:V為載機平臺速度;ξ為柱形共形陣元對應圓弧角;ρ為柱形共形陣元圓弧對應的圓弧半徑;n=1,2,…,N,N為合成后的陣元數;l=1,2,…,L,L為回波距離單元數;k=1,2,…,K,K為相干處理脈沖數;fr為雷達的脈沖重復頻率;λ為波長;φl為第l距離單元的俯仰角。并求得柱形共形陣的天線方向圖[12]:

(3)
式中:ωek,ωak為列子陣、行子陣的陣元加權;ψ0,φ0分別為主波束的空間錐角和俯仰角;m=1,2,…,M,M為柱形共形陣陣元行數;βak為合成行子陣波束的相位修正因子,即

(4)
假設cl(n,k)為第n個陣元(列子陣合成后的等效陣元)的第k個脈沖對第l個距離環的接收數據,則有
(5)
式中,Rl為第l個距離單元相對應的雷達斜距。
1.2 低空風切變信號
利用流體力學的三維風場模型[13]得到風場速度信息和相關場密度信息,利用撒點法將波束范圍內每個散射點的回波疊加[14]。對于風場中第q個散射點,由雷達方程[15]可推導其回波信號幅度為
(6)
式中,Pt為雷達發射機功率,G為柱形共形陣天線增益,Rq為第q個散射點與載機平臺的徑向距離,Z為風場反射率因子。
假設sl(n,k)表示柱形共形陣第n個陣元的第k個脈沖對第l個距離單元內風場的接收數據,則有
(7)
式中,Q為散射點數,ωss(θq,φq)為柱形共形陣的空間角頻率,ωts(θq,φq)為柱形共形陣的時間角頻率,vq為徑向速度,ψq為第q個散射點與載機平臺的空間錐角,并且
(8)
1.3 回波信號
雷達回波信號由低空風切變信號、地雜波信號和高斯白噪聲信號組成,即x=s+c+n,柱形共形陣進行列合成以后,柱形共形陣列等效接收陣元數為N,假設雷達一個相干處理時間內發射脈沖數為K,則每個距離單元的接收矩陣為
(9)
假設共有L個距離單元,所有距離單元回波數據可表示為X=[X1X2…XL]T。
2 基于空域角頻率補償+STAP的低空風切變風速估計方法
由于柱形共形陣列合成后陣元變化是在空間上是二維的,因此常規的多普勒頻率補償法將不再適用。與面陣相比,柱形共形陣的雜波非均勻性更強,雜波抑制更為困難,若直接估計雜波協方差矩陣會導致STAP雜波抑制性能嚴重下降。針對柱形共形陣列,本文先采取空域角頻率補償法對回波數據進行補償,使得估計雜波協方差矩陣所需的樣本滿足獨立同分布的條件,然后利用最優STAP抑制地雜波,提取各個距離單元內風切變信號的最大多普勒頻率,完成風速估計。下面對空域角頻率補償法、基于STAP的低空風切變風速估計進行詳細描述。
2.1 空域角頻率補償法
針對柱形共形陣引起雜波非均勻現象的本質原因,以機載線性陣列體制下一種非正側面多普勒補償方法為參考[16],分析柱形共形陣特殊陣列流型導致雜波非均勻的根本,提出了一種機載柱形共形陣體制下空域角頻率補償法,算法流程圖如圖2所示。多普勒頻移補償等方法僅從多普勒頻率的角度進行回波補償,并未考慮共形陣由于特殊陣列結構引起的雜波非平穩性,而空域角頻率補償法從共形陣陣列流型出發解決共形陣雜波抑制困難的問題。

圖2 空域角頻率補償法流程圖
(10)
式中Si=Sti?Ssi,?表示Kronecker積,
Sti= [1,ejwti,…,ej(k-1)wti]T
(11)
(12)
Ssi= [ejwsi1C,ejwsi2C,…,ejwsiNC]T
(13)
(14)
其中xn,yn為柱形共形陣元按列合成后的陣元位置坐標。
針對此本質原因,以柱形共形陣對應線性陣列波束指向處的空域角頻率值為基準,求得柱形共形陣空域角頻率的補償量并推導補償因子,然后對柱形共形陣各個距離單元的回波數據進行補償,對消掉由于柱形共形陣特殊陣列配置造成的空域角頻率不同部分,進而精確估計待檢測距離單元的雜波協方差矩陣,為后續空時自適應做預處理。具體如下:
首先,以柱形共形陣列的主波束方向角θ0為基準,求得柱形共形陣雷達回波某距離單元的補償量[17]:
ws0n=ws0nC-ws0np
(15)
(16)
(17)
式中,ws0nC表示柱形共形陣列的空域角頻率,ws0np表示對應線陣的空域角頻率,求得當前距離單元的補償因子為
T=diag(Sr)?IN
(18)
其中,Sr= [ejws01,ejws02,…,ejws0N]T,IN為N×N維的單位矩陣。當前距離單元補償回波信號經補償后為
(19)
此時,經過預處理以后的回波數據得到一定的改善,由于柱形共形陣陣列流型導致的雜波嚴重非均勻性得到一定程度的抑制,各個距離單元的回波數據基本滿足獨立同分布條件。
然后,選取第l個距離單元為待檢測距離單元,根據先驗信息補償載機運動對回波的相位影響并估計待檢測距離單元的雜波協方差矩陣為
(20)
2.2 基于STAP的風速估計方法
空時自適應處理器技術依據回波空時耦合性進行雜波抑制與信號匹配[18],最優處理器可以描述為如下的數學優化問題:
(21)

S=SS?St
(22)
其中,
SS= [ejws1,ejws2,…,ejwsN]T
(23)
St= [1,ejwt,…,ej(K-1)wt]T
(24)
其中,wsn為歸一化空間角頻率,wt為歸一化時間角頻率。此時可以求出柱形共形陣空時自適應濾波器的最優權矢量:
(25)
(26)

(27)
最后,對柱形共形陣各個距離單元的回波數據都進行最優空時自適應處理并估計風場速度,便可以得出不同距離單元低空風切變風速的變化情況。
2.3 算法流程

圖3 機載柱形共形陣體制下低空風切變風速估計方法的基本流程
圖3為機載柱形共形陣體制下低空風切變風速估計方法的基本流程圖。針對柱形共形陣氣象雷達體制,該方法采用空域角頻率補償法解決由于共形陣特殊陣列流型引起的雜波嚴重非均勻性,獲得獨立同分布樣本后構造柱形共形陣最優空時處理器進行雜波抑制,提取各個距離單元的最大多普勒頻率并估計低空風切變風速。
在高雜噪比下,本文方法也能夠精確估計風場速度,對回波數據處理步驟如下:
步驟1: 利用空域角頻率補償法對回波數據進行補償,補償柱形共形陣體制下地雜波嚴重非均勻性,使得各個距離單元的回波數據滿足獨立同分布的條件;
步驟2: 對接收回波數據進行相位補償,消除由于載機平臺運動帶來的雷達回波信號多普勒偏移;
步驟3: 通過參考距離單元的回波數據估計待檢測距離單元的雜波協方差矩陣;
步驟4: 構造柱形共形陣空時自適應處理器,求得柱形共形陣處理器的最優權矢量,實現柱形共形陣地雜波抑制并進行信號匹配,估計當前距離單元內低空風切變信號的中心頻率,得到低空風切變風速估計結果;
步驟5: 更新待檢測距離單元,處理雷達工作范圍內的各個距離單元的回波數據,得到風速估計曲線。
3 仿真結果及分析
3.1 仿真條件設置
表1所示為仿真時系統的主要參數值。

表1 載機及雷達仿真參數
3.2 仿真結果分析
圖4為柱形共形陣回波信號的距離-多普勒,由圖中可知,地雜波信號主要集中在零頻上,強雜波信號的中心頻率在零多普勒頻率附近,且其信號幅度明顯高于風切變信號的幅度。由圖還可知,波束照射到地面雜波散射單元,其產生的強雜波幅度明顯高于風切變信號回波,甚至將有用的風切變信號淹沒。并且不同距離單元的回波幅度不同,隨探測距離的增加,對于同時包括風切變信號、地雜波信號和噪聲的距離單元,其回波幅度分布整體呈下降趨勢。
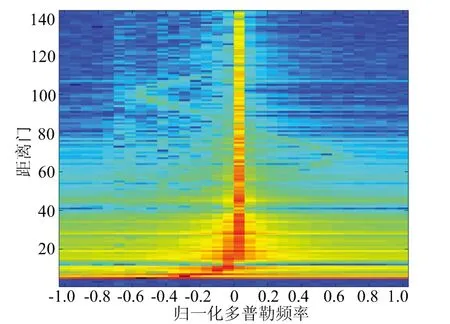
圖4 機載柱形共形陣回波信號距離-多普勒
對天線陣列回波的雜波協方差矩陣進行特征分解,可以得到雜波特征值的分布情況。圖5是面陣與柱形共形陣雜波特征值分布情況。柱形共形陣雜波協方差矩陣與面陣相比,柱形共形陣雜波大的特征值個數明顯多于面陣雜波大的特征值,因此柱形共形陣的雜波抑制需要更多的系統自由度。
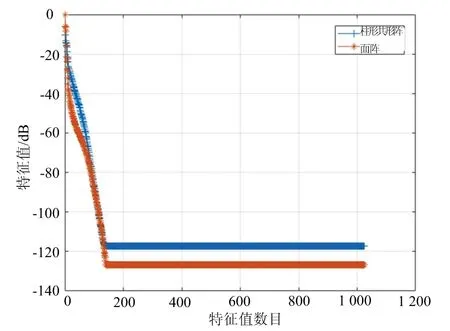
圖5 雜波特征值分布情況
圖6以第74~78號距離單元為例的柱形共形陣空時自適應處理器的頻響特性,可以看出最優處理器在信號方向有最強的輸出,處理器在強雜波信號零多普勒頻率處形成凹口以濾除雜波,達到良好的濾波效果,以便后續實現低空風切變的檢測。

圖6 第74~78距離單元濾波器頻響
在同等雜噪比與信噪比條件下,本文方法處理效果明顯優于多普勒頻率補償空時自適應法與多普勒補償(DW)法、協方差矩陣加權法(SMI-CMT)法等傳統方法。結果證明,本文提出的基于空域角頻率補償空時自適應的低空風切變風速估計方法可以在強雜波條件下有效地抑制地雜波,并精確估計風場速度。風場速度估計結果如圖7所示。

圖7 風場速度估計結果
4 結束語
針對柱形共形陣體制下對低空風切變探測目標信號會嚴重受到地雜波的影響,導致低空風切變風速估計結果不準的問題,提出一種基于空域角頻率補償法的自適應低空風切變檢測方法。該方法是將柱形共形陣列引入到機載氣象雷達中,分析柱形共形陣其特殊陣列流型引起雜波抑制困難的本質原因,針對共形陣的特殊陣列流型并對比均勻線陣,采用空域角頻率補償法對柱形共形陣的回波數據進行預處理,利用處理后的數據估計柱形共形陣體制下的雜波協方差矩陣,代入求解最優處理器權矢量,自適應濾波后估計風切變信號的多普勒中心頻率,從而實現精確的風速估計。仿真結果表明,在機載柱形共形陣體制下,本方法可以自適應地抑制地雜波并精確估計風場速度。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
西南交通大學學報(2016年4期)2016-06-15 20:29:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15