基于LiDAR輔助的GNSS/INS組合導(dǎo)航設(shè)計
2023-01-11 01:48:50申建華譚志強楊思佳
河北工業(yè)科技 2022年6期
申建華,譚志強,楊思佳
(1.中國電子科技集團公司第五十四研究所,河北石家莊 050081;2.電子信息系統(tǒng)復(fù)雜電磁環(huán)境效應(yīng)國家重點實驗室,河南洛陽 471001;3.北京衛(wèi)星導(dǎo)航中心,北京 100094)
隨著自動駕駛、智慧城市等研究領(lǐng)域的飛速發(fā)展,基于定位服務(wù)(location based services,LBS)的行業(yè)標(biāo)準(zhǔn)及要求越來越高。全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS) 近幾年得到飛速發(fā)展,主要包括多頻多星座的系統(tǒng)拓展,如中國北斗的全球服務(wù)應(yīng)用、美國GPS系統(tǒng)現(xiàn)代化等,同時相關(guān)增強系統(tǒng)(包括星級增強(SBAS),地基增強(GBAS)等)的發(fā)展大大提高了GNSS系統(tǒng)在開闊場景下的服務(wù)能力,滿足了大部分應(yīng)用場景下的作業(yè)要求。
但對于挑戰(zhàn)環(huán)境下的GNSS導(dǎo)航技術(shù)仍有待突破,特別是在茂密的森林、高樓林立的城市或室內(nèi)環(huán)境下,GNSS信號因信號衰減、多路徑、干擾等因素?zé)o法正常到達接收機終端,嚴重影響定位精度,甚至無法完成定位服務(wù)[1-2]。為了增強GNSS拒止場景下的導(dǎo)航定位服務(wù)能力,目前主要應(yīng)用的強化技術(shù)包括GNSS反干擾天線、手機通信、Wi-Fi定位、航位推算、天文導(dǎo)航、重力梯度儀、量子導(dǎo)航、偽衛(wèi)星等技術(shù)。基于機會信號(電視信號、手機信號、偽衛(wèi)星等)的定位技術(shù)需要基礎(chǔ)設(shè)施支撐,往往需要較大的成本,同時也需要保證機會信號的完好性,另一方面,基于量子、重力梯度等前沿技術(shù)的導(dǎo)航技術(shù),因成本、技術(shù)成熟度等問題短時間內(nèi)無法落地實現(xiàn)。
在目前常規(guī)應(yīng)用中,仍以自主性較強的航位推算算法為主,以解決GNSS拒止場景下的精度、可靠性問題。其中慣性導(dǎo)航系統(tǒng)(inertial navigation system,INS)是應(yīng)用較廣的自主導(dǎo)航方案,其可以通過自主加速度計、陀螺量測的積分操作來實現(xiàn)短期的航位推算,提供位移、姿態(tài)變化信息。由于加速度計、陀螺儀零偏的存在,導(dǎo)致位置、速度、姿態(tài)的估計誤差會隨時間指數(shù)級增長,一方面,可以通過高精度慣性量測單元(IMU)來實現(xiàn)長期的高精度航位推算,但通常類似高精度IMU(如導(dǎo)航級)的成本過高,將無法應(yīng)用于常規(guī)應(yīng)用場景中。另一方面,INS可以通過GNSS不定期的組合糾正誤差來抑制誤差的積累,從而實現(xiàn)長期可靠的導(dǎo)航。典型的GNSS/INS組合導(dǎo)航系統(tǒng)包括松組合、緊組合、超緊耦合系統(tǒng)[3-8],考慮到目前可見星數(shù),一般采用松組合系統(tǒng)即可滿足常規(guī)的定位導(dǎo)航服務(wù)。
在室內(nèi)自主導(dǎo)航定位應(yīng)用中,可以通過激光雷達(LiDAR)或視覺系統(tǒng)來記錄周圍環(huán)境信息,推算自己的行進軌跡,達到定位目的[9]。SLAM(simultaneous localization and mapping)起源于1986年的ICRA(international conference on robotics and automation)會議,PETER,JIM,DURRANT-WHYTE等幾位學(xué)者討論了定位與制圖的估計理論與方法。 SMITH和DURRANT-WHYTE等建立了基于相對地標(biāo)的卡爾曼濾波模型。1966年,DURRANT-WHYTE等系統(tǒng)性地定義了SLAM的結(jié)構(gòu)、收斂結(jié)果以及縮寫。國外對SLAM技術(shù)的研究要比國內(nèi)早很多,已經(jīng)有一批相當(dāng)不錯的成果,比如Google的Cartographer背包系統(tǒng)[10]、CSIRO的Zebedee系統(tǒng),這些系統(tǒng)包括了2D,3D激光和視覺SLAM[11],可以進行高精度的環(huán)境建模,現(xiàn)已應(yīng)用到各個領(lǐng)域,并結(jié)合其他傳感器進行了融合定位導(dǎo)航[12-13]。同時國內(nèi)的SLAM也有了一定的發(fā)展[14-15],但主要是應(yīng)用研究,受限于LiDAR成本的約束,并沒有得到廣泛的推廣應(yīng)用。
本文在分析了GNSS定位與激光SLAM技術(shù)各自的優(yōu)缺點之后,對GNSS/INS/LiDAR組合的可行性進行了探究,期望構(gòu)建出一個能全天候運行、適應(yīng)各種環(huán)境的導(dǎo)航定位算法,并在實驗車平臺中實現(xiàn)算法的初步驗證。
1 GNSS/INS組合系統(tǒng)
全球衛(wèi)星導(dǎo)航系統(tǒng)和慣性導(dǎo)航系統(tǒng)具有很強的互補特性,GNSS/INS組合系統(tǒng)充分利用了GNSS長期精度高和INS短期精度高、抗干擾能力強的優(yōu)點,取長補短,獲得了比單獨使用任一系統(tǒng)時更高的導(dǎo)航性能,也因此在軍民領(lǐng)域都得到了越來越廣泛的研究和應(yīng)用。GNSS/INS組合導(dǎo)航系統(tǒng)如圖1所示。
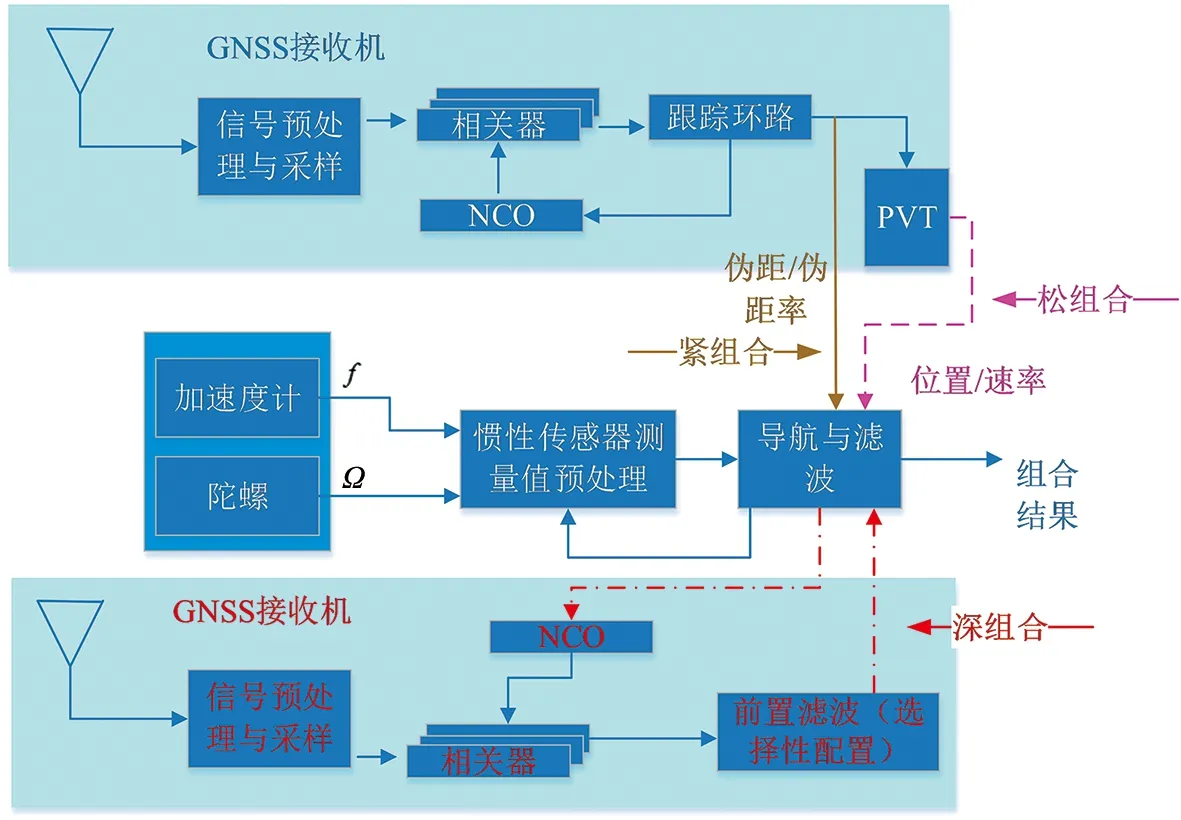
圖1 GNSS/INS組合導(dǎo)航系統(tǒng)Fig.1 GNSS/INS integration system
GNSS與INS的組合策略通常有3種:松組合、緊組合和深組合[4-5]。其中,松/緊組合系統(tǒng)是系統(tǒng)級組合,GNSS與INS保持相對的獨立性,該技術(shù)迄今為止已經(jīng)相對比較成熟。GNSS可見情況下,GNSS/INS組合導(dǎo)航系統(tǒng)是常規(guī)的定位、定姿解決方案。在低成本GNSS/INS組合導(dǎo)航系統(tǒng)中,主要有初始化問題。初始姿態(tài)需要一定的精度,否則導(dǎo)航系統(tǒng)會慢慢發(fā)散或者存有粗差。即便在精準(zhǔn)的初始化前提下,由于航向參數(shù)的弱觀測性,航向估測也會慢慢漂移,在這種情況下,需要其他傳感器,如電子羅盤等來對系統(tǒng)航向估測保持長時間的穩(wěn)定可靠。
如圖2所示,IMU組件將通過自身的航位推算來計算位置、速度(主要包括速度更新、位置更新、姿態(tài)更新3個步驟)[4]。在本方案中,主要采用了如式(1)和式(2)所示的“單子樣+前一周期”算法來補償不可交換誤差。
(1)
(2)
φ(T)為當(dāng)前時刻的等效旋轉(zhuǎn)矢量。在速度更新中,考慮到IMU精度及航位推算時間長度,在速度更新中并沒有加入旋轉(zhuǎn)效應(yīng)及劃槳效應(yīng)補償。基于航位推算的位置、速度精度主要取決于IMU器件本身及累積時間,所以不能依靠長時間積累的位置、速度信息。
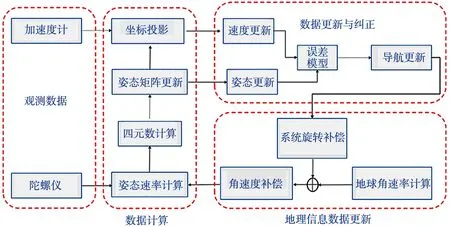
圖2 INS航位推算Fig.2 Dead-reckoning of INS
在GNSS拒止或不可見情況下,GNSS/INS組合系統(tǒng)直接切換為圖2所示的純INS導(dǎo)航系統(tǒng),由于初始狀態(tài)零偏、慣性器件零偏等誤差因素的影響,在中低精度的IMU傳感器情況下,導(dǎo)航的精度會在短時間內(nèi)發(fā)散,無法保障導(dǎo)航系統(tǒng)的聯(lián)系服務(wù)能力。如圖3所示,在RTK/INS組合系統(tǒng)測試中,在組合系統(tǒng)穩(wěn)定之后,通過不同周期的純INS定位結(jié)果來估計INS短時精度,具體精度主要取決于初始零偏、初始姿態(tài)等狀態(tài)信息精度,在圖3跑車實驗中,可以得出在30 s以上,MEMS慣組的純DR精度將大打折扣。
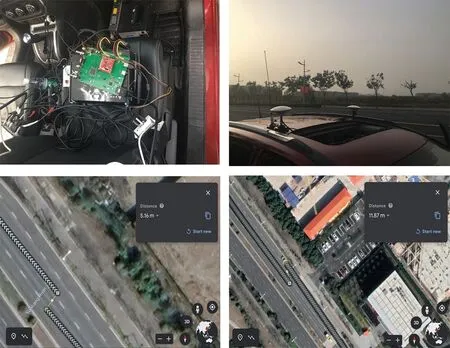
圖3 基于SBG Ellipse-A-GEA2-B1慣組的純導(dǎo)航 測試,30 s偏離(5.2 m)40 s 偏移(11.87 m)Fig.3 INS DR test using a MEMS-IMU(SBG Ellipse- A-GEA2-B1),positioning error in 30 s (is 5.2 m), positioning error in 40 s (is 11.87 m)
2 LiDAR輔助的GNSS/INS導(dǎo)航系統(tǒng)
常規(guī)LiDAR-SLAM與視覺SLAM的工作流程基本都可以概括為3個環(huán)節(jié):1)前端利用連續(xù)的點云/影像配準(zhǔn),粗略估計機器人的相對運動;2)將當(dāng)前接收到的環(huán)境信息與之前存儲的局部地圖進行frame-to-map匹配(或者局部地圖與全局地圖匹配等),修正位姿;3)后端建立位姿圖進行整體優(yōu)化,或濾波求解。
如圖4所示,主要采用了LOAM框架[16],將整個LOAM系統(tǒng)分成4個主要部分:1)點云注冊(point cloud registration);2)里程計(LiDAR odometry);3)建圖(LiDAR mapping);4)位姿整合(transform integration)。
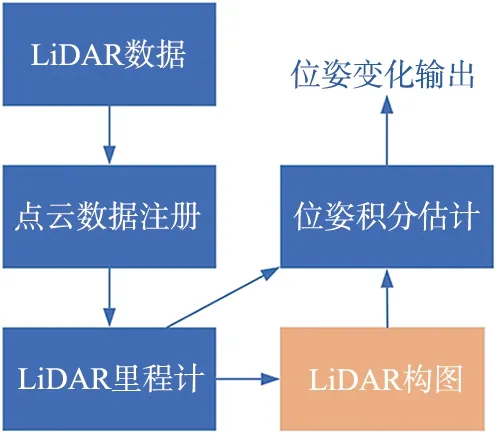
圖4 LOAM系統(tǒng)架構(gòu)Fig.4 Structure of LOAM algorithm
工作流程概括:首先點云注冊部分對接收到的LiDAR點云數(shù)據(jù)進行預(yù)處理,包括消除運動畸變、特征點提取等;在里程計部分,通過相鄰幀的點云匹配技術(shù),輸出一個高頻(10 Hz)的位姿;接著建圖部分利用新接收的點云幀與建好的局部地圖再配準(zhǔn)優(yōu)化高頻位姿,輸出一個低頻位姿(1 Hz)并更新地圖;最后位姿整合部分將低頻位姿融合到高頻位姿并輸出。LOAM相比其他激光SLAM算法的優(yōu)點是它充分發(fā)揮了幀到幀(frame-to-frame)和幀到地圖(frame-to-map)點云匹配算法的優(yōu)勢,并能針對計算量大小為它們安排合適的任務(wù),LOAM算法能實現(xiàn)的精度可以達到總行駛距離的3%以內(nèi)[16]。
點云匹配算法可分為幀到幀(frame-to-frame)、幀到地圖(frame-to-map)、子圖到地圖(map-to-map)。其中,frame-to-frame用到的點云數(shù)據(jù)最少,所以計算量小、精度低。 frame-to-map適中,map-to-map匹配得到的位姿最準(zhǔn)確但計算量太大,不適合用在實時環(huán)境中。LOAM把定位和建圖分開,在定位時,使用frame-to-frame時,因為其計算量小,所以高頻輸出,達到實時定位的目的;建圖時則使用frame-to-map,使得生成的地圖和位姿更準(zhǔn)確,并以較低的頻率執(zhí)行保證不占用過多的CPU資源[17];最后再將這2個位姿信息融合。總之就是高頻里程計低頻建圖,這樣的方案既保證了里程計信息和建圖的準(zhǔn)確性,又兼具了實時性。
LiDAR數(shù)據(jù)掃描過程如圖5所示。針對機械式LiDAR,點云數(shù)據(jù)的運動補償是關(guān)鍵步驟。
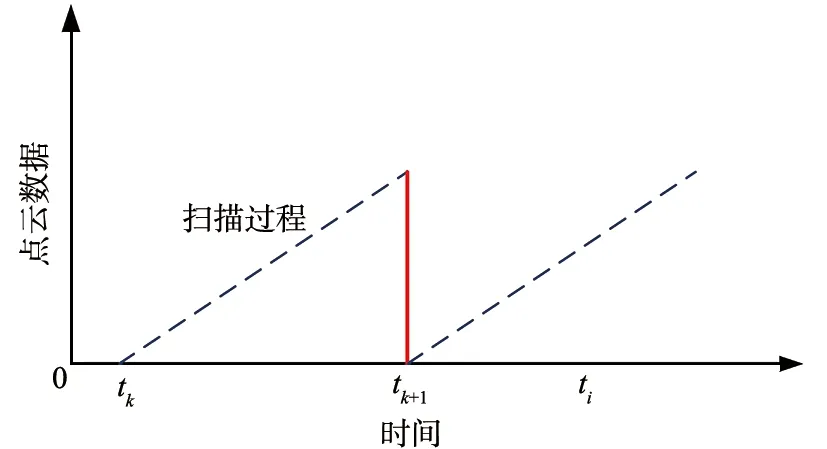
圖5 LiDAR數(shù)據(jù)掃描過程Fig.5 Scanning process of a LIDAR
(3)

(4)

考慮到LiDAR-SLAM與傳統(tǒng)GNSS/INS組合系統(tǒng)的優(yōu)缺點,提出了如圖6所示的LiDAR輔助的GNSS/INS組合系統(tǒng)。

圖6 LiDAR輔助的GNSS/INS組合系統(tǒng)Fig.6 LiDAR aided GNSS/INS integration system
GNSS/INS組合系統(tǒng)主要的原理是利用LiDAR-SLAM前端里程計短時精度,去彌補短時GNSS拒止情況下的導(dǎo)航定位服務(wù),同時也考慮了激光雷達的完好性分析[16]。
3 實驗驗證
為了驗證LiDAR輔助的GNSS/INS組合系統(tǒng)架構(gòu)的正確性,在實驗車的平臺上搭建了驗證系統(tǒng),如圖7所示。

圖7 實驗驗證平臺Fig.7 Experiment platform
軟件:VMware Workstation 14 Player虛擬機,Ubuntu16.04,ROS Kinetic,Opencv-3.3.0,PCL-1.8.1。硬件:1)GNSS/INS使用u-blox的GPS芯片,SBG慣組;2)LiDAR使用速騰聚創(chuàng)的Robosense16線激光雷達。
3.1 室內(nèi)實驗(純LiDAR)
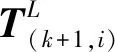
首先在室內(nèi)做了LiDAR里程計算法的測試,室內(nèi)場景實驗結(jié)果如圖8所示。可以明顯看到紅圈后面的定位結(jié)構(gòu)完全與真實方向存在明顯的90°偏離,這是由于在特征匹配問題上造成的。實驗中由于在手持LiDAR時,繞該方向的抖動導(dǎo)致LiDAR在x軸的位姿角陡增,而后無法修正的原因。
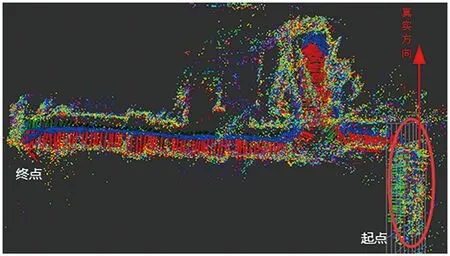
圖8 室內(nèi)場景實驗結(jié)果Fig.8 Experiment result in indoor scenario
其次在室外停車場做了3組典型實驗,結(jié)果如圖9所示:1)是沿著停車場直線行走的結(jié)果;2)和3)是在轉(zhuǎn)彎處,快速轉(zhuǎn)彎導(dǎo)致特征匹配失效,發(fā)生了不同程度的偏離。
圖9 停車場實驗結(jié)果Fig.9 Experiment results in a parking spot
3.2 室外組合實驗
在室外組合實驗中,如圖10所示,點1到點2,點3到點4,點5到點6段,手動將GNSS輸入關(guān)閉(拒止場景),通過圖6所示的方法,保證了導(dǎo)航定位的連續(xù)性服務(wù)。

圖10 GNSS拒止場景下的組合導(dǎo)航軌跡圖Fig.10 Integrated navigation trajectory diagram in GNSS-denied scenario
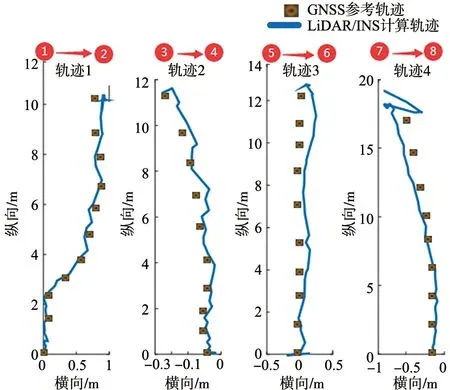
圖11 LiDAR/INS定位與GNSS參考結(jié)果對比Fig.11 Comparison between positioning results of LiDAR/INS odometry and GNSS reference
如圖11所示,在模擬的4段GNSS拒止場景下(前3段各自為25 s,第4段為35 s),LiDAR/INS里程計很好地保持了GNSS/INS導(dǎo)航精度,其軌跡與GNSS參考軌跡基本一致,累積距離誤差控制在0.5 m以內(nèi)。LiDAR/INS短期定位誤差如表1所示。

表1 LiDAR/INS短期定位誤差(以GNSS為標(biāo)準(zhǔn))Tab.1 Position error statics of LiDAR/INS in short periods (take GNSS as the standard)
實驗結(jié)果表明,在對設(shè)備和算法進行改善后,完全可以勝任為GNSS信號弱的區(qū)域提供短時間相對定位任務(wù)的。
4 結(jié) 語
首先在分析了GNSS定位的局限性后,探討了一種基于SLAM技術(shù)相對定位的補償方式,并將這兩種技術(shù)結(jié)合在一起期望達到更好的定位效果,并在小車平臺上進行驗證。從本文實驗驗證中,可以得出以下結(jié)論。
1)純LiDAR定位、定姿存在一定的漂移,特別在中間出現(xiàn)特征匹配丟失的情況下,直接會引入較大的姿態(tài)、位置估計誤差。
2)在GNSS/INS定位導(dǎo)航系統(tǒng)工作期間,GNSS的丟失可以依靠LiDAR里程計去彌補并保證整個定位導(dǎo)航系統(tǒng)服務(wù)的連續(xù)性和可靠性。
從GNSS/INS/LiDAR組合方案及對應(yīng)的測試結(jié)果可以初步證實GNSS挑戰(zhàn)環(huán)境下的多源異構(gòu)組合導(dǎo)航系統(tǒng)的優(yōu)越性。但針對多源融合方式本身的算法結(jié)構(gòu)需要進一步優(yōu)化和探討,主要包括多源異構(gòu)傳感之間的深耦合組合及完好性分析,這些將有助于實現(xiàn)高精度、高魯棒性的多源融合導(dǎo)航系統(tǒng)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
