內河航道管理中無人機的應用分析
2023-01-12 07:17:34嚴秀秀
科技創新與生產力 2022年11期
關鍵詞:測量
嚴秀秀
(安徽省港航管理局淮河航道局,安徽 蚌埠 233000)
傳統的內河航道管理工作通常采用汽艇巡邏方式,以人工肉眼進行觀察,工作效率低,工作量大,不能及時發現問題,特別是對于地理條件較為惡劣的河段,難以實施有效的管理。無人機可攜帶多角度攝像機,結合機器視覺分析技術,快速實現針對性巡查,準確獲取位置信息,具有視角大、響應快、方便取證等特點,非常適合航道管理應用[1-2]。本文研究淮河航道管理中的無人機應用情況,對常見的應用場景進行分析,用實際數據對無人機航拍測量的光束法空中三角測量的精度進行論證。
1 無人機在航道管理中的應用
淮河安徽段具有險灘密布、沼澤遍布、植被密布、地形復雜等特點,全線航道管理困難。無人機可搭載多鏡頭高清攝像系統,具有視角大、響應及時、方便取證、準確度高等諸多優點,可以很好地解決淮河航道巡視管理的難題。無人機在淮河的航道管理中有如下應用。
1)用于航道沿線構筑物的觀測。許多沿線構筑物會在枯水期露出水面,利用無人機對航道沿線構筑物進行觀測,完成點位坐標測量,開展巡檢工作,針對構筑物的變化情況和損毀情況進行統計。
2)用于臨河設施的測量。淮河沿線的碼頭數量較多,浮式碼頭與水位的變化關系密切,無人機能快速測繪碼頭的數據,提供精確的位置變化信息。
3)用于岸線和險灘的測量。無人機進行航道測繪,精度高,效率高,能夠真實反映險灘與岸線的變化情況。
4)用于船舶位置的監測。無人機可識別船只,準確測量船舶位置,對非法采砂等違法行為進行調查取證。
無人機在航道管理中的實際應用涉及無人機航拍測量,下文將對無人機航拍的測量原理進行闡述,并用實際數據評價測量精度。
2 無人機空中三角測量
2.1 光束法空中三角測量原理
無人機攜帶相機對地面的目標進行測量,通常采用光束法空中三角測量。測量時,由像片的一束光線組成平差單元,平差的基礎方程由中心投影的共線方程確定,然后通過投影空間的旋轉變換和平移變換,實現待測目標的光線交匯,形成公共點[3]。將整個待測區域的最佳交匯點融入到已知的控制點坐標系中,進行平差計算,進而確定地面坐標。測量原理見圖1。
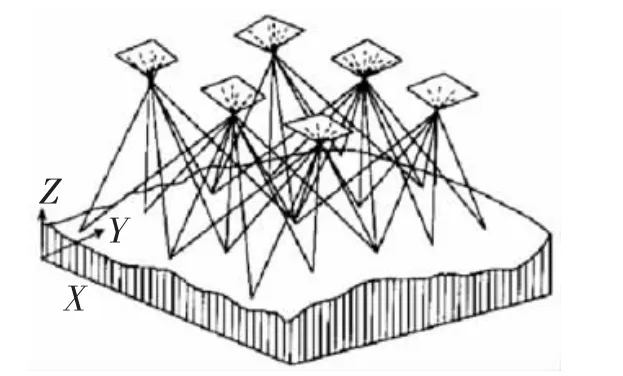
圖1 光束法空中三角測量
目前,無人機航拍空間測量采用全自動處理的空三軟件,即利用上述原理,在無人機航拍的圖像中自動識別航向和旁向的像素點,將待測區域中各個航帶網融入到比例尺統一的坐標系統中,組成區域網。通過計算確認每張像片的外方位元素和地面點坐標的概略位置,然后根據外業控制點,逐點建立誤差方程式和改化方程式,求解方程得出每張像片的外方位元素和加密點的地面坐標[4]。對于一個待測區域來說,通常會有幾條甚至幾十條航帶,像片數將有幾十張甚至幾千張。通過疊加修正運算即可得到準確的測點地面坐標。光束法空中三角測量計算流程見圖2。

圖2 空中三角測量法的計算流程
2.2 無人機測量系統
本文使用的無人機巡航系統是大疆M300RTK+PSDK102S系統。技術參數見表1。PSDK102S系統是一款三軸五鏡頭傾斜攝像系統,中間鏡頭為主攝像鏡頭,能夠拍攝正視圖像,四周均布設4個傾斜鏡頭,可以拍攝傾斜圖像。5個鏡頭拍攝的圖像進行疊加運算,可得到修正的綜合圖像。

表1 大疆M300RTK+PSDK102S系統參數
2.3 無人機測量的精度分析
平面測量相對誤差和高程測量相對誤差是評價無人機在測量時精度的重要指標[5]。平面測量相對誤差的計算表達式為

高程測量相對誤差的計算表達式為

式(1)和式(2)中:Δx為x方向實測控制點的坐標值與無人機航拍測得的坐標值之差;Δy為y方向實測控制點的坐標值與無人機航拍測得的坐標值之差;Δh為高度方向Δh實測控制點的坐標值與無人機航拍測得的坐標值之差。
在淮河某段航道5 km范圍內,設定20個基準控制點,無人機沿預定航線進行平面測量和高程測量,航拍測量參數見表2。基準點的數量會影響加密運算精度,選擇以4~20的雙數基準控制點,共9種情況進行對比分析,獲取圖像共計50 000張,用于測量精度統計分析。

表2 無人機航拍測量參數
對平面測量和高程測量的結果進行分類統計,按照式(1)和式(2)計算測量結果的相對誤差,得到基于傾斜圖像的測量相對誤差(見表3),基于正視圖像的測量相對誤差數據(見表4),基于綜合圖像的測量相對誤差數據(見第66表5)。

表3 傾斜圖像測量的相對誤差統計數據

表4 正視圖像測量的相對誤差統計數據
由表3數據可知,基于傾斜圖像的測量結果中,平面測量的相對誤差最大為1.63%,高程測量的相對誤差最大為0.96%,均是出現在只有4個基準控制點的情況下。隨著基準控制點數增多,精度得到了明顯改善,當基準點數量達到12個時,平面測量相對誤差降至1%以內,測量精度尚可接受。
由表4數據可知,基于正視圖像的測量結果中,平面測量的相對誤差最大為1.05%,高程測量的相對誤差最大為0.56%,也是出現在基準控制點數最少的情況下。隨著基準控制點數增多,測量精度得到了大幅提升。
由表5數據可知,平面測量的相對誤差最大為0.73%,高程測量的相對誤差最大為0.31%,相應的變化規律與傾斜圖像和正視圖像測量數據反映的規律一致。
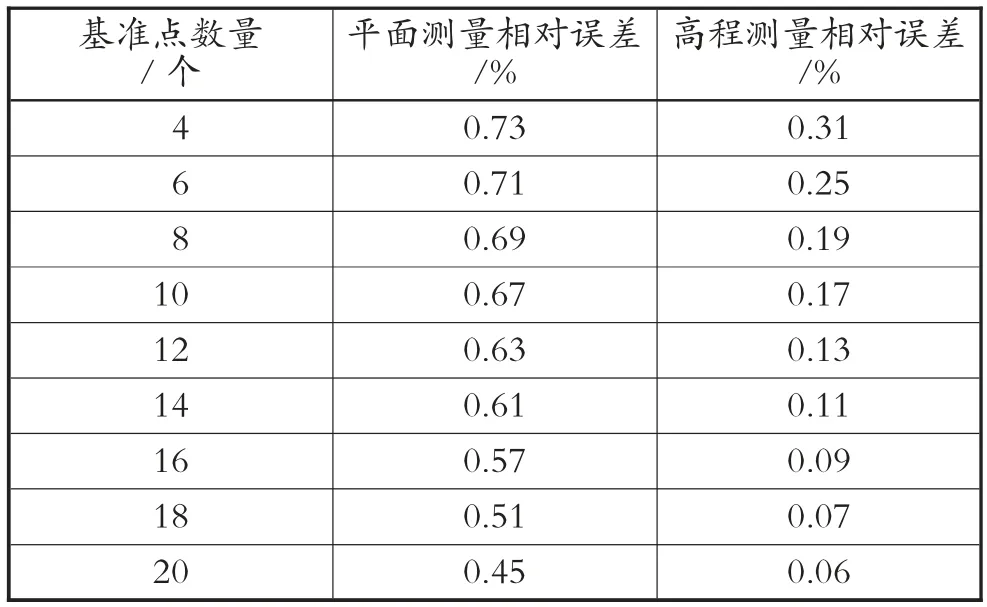
表5 綜合圖像測量的相對誤差統計數據
為了進行綜合對比分析,將傾斜圖像、正視圖像和綜合圖像得到的平面測量誤差數據繪制成曲線(見圖3),高程測量誤差數據繪制成曲線(見圖4)。
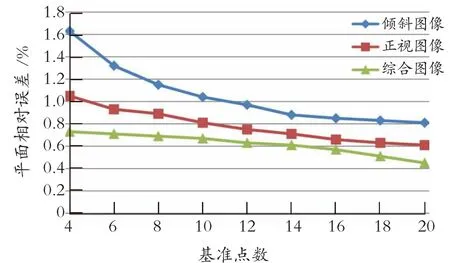
圖3 平面測量誤差數據曲線

圖4 高程測量誤差數據曲線
由圖3和圖4可知,基于傾斜圖像的測量誤差是最大的,傾斜攝像機在實際拍攝過程中,由于像片傾斜會引起像點位移,從而導致測量精度較低。相應的,基于綜合圖像的測量誤差,在平面測量和高程測量中,相對誤差均最小。綜合圖像是由5個攝像機拍攝的圖像疊加運算而成,系統對圖像進行了修正運算,因此測量精度最高。基于正視圖像的測量精度介于二者之間,但明顯優于基于傾斜圖像的測量精度,在航道巡檢測量要求不高的任務中,可直接使用,減少系統運算量,進一步提高效率。此外,隨著基準點數量的增加,無人機測量系統對于數據修正的能力增強,平面測量和高程測量的精度都得到了顯著提高。由此可見,選擇合適數量的基準控制點非常關鍵。
3 無人機在淮河航道管理中的運用
近期淮河流域遭遇嚴重氣象干旱,淮河全線水位快速下降,吳家渡附近水位降至11.35 m,已接近最低通航水位。津浦鐵路橋位于吳家渡水文站附近,此處的淺灘和礁石現已露出水面,嚴重影響船舶的航行安全。為保障淮河船舶航行安全,進一步掌握津浦鐵路橋附近淺灘的詳細情況,淮河航道局組織專業技術人員赴現場進行詳細勘測。測繪人員采用無人機對津浦鐵路橋附近淺灘進行弓字形多維度航拍,繪制高分辨率正視圖像,并拍攝了視頻資料,形成了津浦鐵路橋附近淺灘的詳實資料(見圖5)。為淮河航道的養護奠定了科學的數據基礎,同時,無人機等先進設備的應用也為淮河航道日常管理和應急保障提供了有力支撐。

圖5 重生成的二維影像圖
另外,無人機在淮河航道發生洪災、船舶碰撞等安全事故時,在救援人員不能及時抵達現場的情況下,無人機能及時掌握現場情況,為決策者提供第一手資料。
4 結束語
本文對無人機在淮河航道管理的應用場景進行了分析,闡述了光束法空中三角測量的原理,并對3種圖像得到的實際測量數據進行了統計。結果表明,基于綜合圖像的測量,在平面測量和高程測量方面,精度最高;基于正視圖像的測量精度次之;基于傾斜圖像的測量精度最低;隨著基準點數量的增加,3種圖像的測量精度得到了明顯改善。無人機在內河航道的巡檢,效率高,方便迅捷,測量準確,在航道管理上有很多優勢。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00